
Proposal of an Automotive Collision Avoidance System based on
Edge Computing
Nicolas Nevigato, Mauro Tropea and Floriano De Rango
Dimes Department, University of Calabria, Via P. Bucci 39/c, 87036 Rende (CS), Italy
Keywords:
Automotive, Edge Computing, Multi-Access Edge Computing (MEC), Collision Avoidance.
Abstract:
Multi-Access Edge Computing (MEC) is a network architecture that enables cloud computing capabilities and
an IT service environment at the edge of the cellular network and, more in general at the edge of any network.
It is often used in safety-critical and mission-critical communications as it is able to guarantee low latency
and high bandwidth. It takes advantage of container-based virtualization and in collaboration with 5G cellular
networks, it is a key enabler for the deployment of vehicular use cases, such as the improvement of road
safety. This paper presents the implementation of a collision avoidance system based on MEC, with the ability
to switch communication to a cloud server when possible, trying to guarantee the required constraints and
balancing the communication among the servers avoiding of overloading edge layer. The simulation results
have proved how in some cases the MEC-5G combination is the best one for the system in order to avoid
collisions on the road.
1 INTRODUCTION
The automotive industry is constantly evolving,
thanks to the numerous and important technologi-
cal transformations it is going through (Giust et al.,
2018). Internet of Vehicles (IoVs) (Yang et al.,
2014) is a network of cars communicating with each
other and with pedestrians handheld devices in a dis-
tributed manner supporting the use of data created
by connected cars and Vehicular Ad-Hoc Networks
(VANETs) (Sharma et al., 2019). Vehicles are be-
coming smarter and more aware of their surroundings
through the integration of new sensors and new com-
munication systems. They are able to exchange in-
formation with other vehicles (V2V communication),
with road infrastructure (V2I communication), with
pedestrians (V2P communication) and with commu-
nication networks (V2N communication). All these
types of communication are incorporated in the so-
called Vehicle-to-Everything communication (V2X
communication), that is, communication from vehicle
to everything.
The vehicular network aims to improve road
safety, increase traffic efficiency and save energy giv-
ing also attention to the emission issues (Santamaria
et al., 2019), (Fazio et al., 2017b). Very studied as-
pects for the ad-hoc network are routing issues as it
is possible to view in (Zhou et al., 2006), (Fotino
Figure 1: Communications in vehicular networks.
et al., 2007), (Socievole et al., 2011), and also for
VANET is an important topic as it is possible to view
in (De Rango et al., 2009), (Fazio et al., 2013). The
cell permanence time and the mobile analysis for pre-
dictive services are important aspects in wireless net-
works and they are object of study by research com-
munities, such as it possible to view in (De Rango
et al., 2008), (Fazio et al., 2017a), (Fazio et al., 2016),
(Frnda et al., 2013). A fundamental aspect to con-
stantly consider in the automotive context is the pos-
sibility of guaranteeing an effective service in order
to obtain low-latency communications. The 5G net-
work can help in this direction, as it guarantees ultra-
low latency and ultra-high reliability in highly mo-
bile and densely connected scenarios. In addition,
the Multi-access Edge Computing, also called Mo-
128
Nevigato, N., Tropea, M. and De Rango, F.
Proposal of an Automotive Collision Avoidance System based on Edge Computing.
DOI: 10.5220/0009971101280135
In Proceedings of the 10th International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH 2020), pages 128-135
ISBN: 978-989-758-444-2
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

bile Edge Computing, (MEC) network architecture
(Porambage et al., 2018), (Pham et al., 2019), which
brings the processing, storage and network capabil-
ities to the edge of the network, can be considered
a key factor in these vehicular networks. In fact, it
meets the requirements of low latency and high band-
width and can be implemented on the roadside and
in the infrastructures of mobile network operators to
support vehicle-to-infrastructure communication.
Several applications represent a concrete use case
of MEC technology in collaboration with the latest
generation networks. A possible use case in the au-
tomotive sector is to make a driver’s driving safer,
through assisted driving systems to improve the re-
liability, efficiency and quality of road transport. For
example, it is possible to think of a system capable
of predicting potential collisions by anticipating de-
tection of a road hazard. In aid of this, it is possible
to use virtualization (Jain and Choudhary, 2016) with
Docker containers (Bernstein, 2014) and the container
orchestrator Kubernetes (Shah and Dubaria, 2019).
The rest of this paper is organized as follows: Sec-
tion 2 presents a brief overview on the vehicular en-
vironment; Section 3 presents the proposal of this
work on the considered research topic. In Section 4,
a description of the developed system is given with a
description of the simulation environment created in
java and the simulator implementation details. The
numerical results are presented in Section 5. Finally,
Section 6 concludes the paper.
2 RELATED WORK
A lot of work exist in literature on topics that regard
the automative envirnoment and Vehicular Ad-Hoc
Networks (VANETs). In general, they face with dif-
ferent issues such as communication protocols, new
technologies used in particular scenarios, virtualiza-
tion capabilities and so on. Many works have been
written on the new paradigm called Internet of Vehi-
cles (IoVs).
In (Song and Jiang, 2015) the authors aim at dis-
covering the related characteristics between the ac-
tive safety strategy and velocity through the visual
analysis of Internet of Vehicles (IoV) warning data.
They propose a warning velocity association model
(WVAM) able to visually validate the relation be-
tween warnings and velocity. Experiments using
Gephi show meaningful results.
In (Xiong et al., 2019) the authors propose an
elastic wave equation model to reveal the relation be-
tween safety distance and road congestion. It can be
found that the propagation speed of road congestion is
largely affected by the safety distance. To recoup the
efficient road safety and alleviate road congestion, an
optimization problem is formulated with cooperative
communication and computing via platoons that aims
to minimize the total safety distance. Simulation ex-
periments show that the proposed algorithm leads to
near-optimal results with low complexity but no over-
head of vehicular information exchange.
In (Khelil and Soldani, 2014) the authors explore
recent Device-to-Device (D2D) research efforts and
review their suitability to safety-critical Internet of
Vehicles (IoV) applications, such as cooperative or
autonomous driving. Their review work shows that
current approaches ignore high relative node mobility
and accurate proximity measurements, and the crucial
research challenges mainly are those related to main-
taining the required QoS level in highly fluctuating
D2D communications. In this work the authors want
to provide a roadmap towards adopting the emerging
D2D technique for critical IoV communications.
In (Santamaria et al., 2018) the attention is fo-
cused on the design of a new approach for vehicular
environments able to gather information during mo-
bile node trips, for advising dangerous or emergency
situations by exploiting on-board sensors. It is as-
sumed that each vehicle has an integrated on-board
unit composed of several sensors GPS device, able to
spread alerting messages around the network, regard-
ing warning and dangerous situations/conditions and
it is assumed that each vehicle can communicate with
on roadside devices called RSU able to spread warn-
ing messages. In this way, if an accident occurs, the
arriving cars will, probably, avoid delay and danger
situations.
3 PROPOSED SOLUTION
The system implemented for the use case shown
above has the following operating principle: the vehi-
cles periodically, by a device installed on board, send
messages that contain information about their status.
In particular, the message contains the ID, the posi-
tion and speed of the vehicle in question. These mes-
sages are received by a MEC server connected to a
roadside base radio station, running on a Docker (doc,
2019) container managed by Kubernetes (kub, 2019).
The information is saved and processed by a software
that can understand when an emergency braking is
taking place and therefore anticipate any collisions.
In this case the MEC server generates an alert mes-
sage, and immediately sends it to the following vehi-
cles within a certain range. When the alert message
reaches the vehicles, automatically, by means of suit-
Proposal of an Automotive Collision Avoidance System based on Edge Computing
129

able devices, the braking system is activated to stop
the vehicle safely and avoid a collision.
A dynamic switching algorithm has also been im-
plemented that allows the vehicle to instantly decide
whether to send the message to the MEC server or to
a cloud located in Europe, so as not to overload the
device on the roadside when it is not necessary.
3.1 Docker and Kubernetes
A container is an isolated environment that shares the
same kernel of the operating system. It contains the
code and all the dependencies to be able to run an
application quickly and easily.
Docker is an open source project that provides a
systematic way to automate the faster deployment of
Linux applications within portable containers (Bern-
stein, 2014; Ahmed and Pierre, 2018). It uses a client-
server architecture model and is based on the concept
of image. A Docker image can include only the fun-
damentals of the operating system, or it can consist of
a sophisticated stack of predefined applications ready
for launch. When creating images with Docker, each
command executed forms a new layer above the pre-
vious one. To create a new image you use the Dock-
erfile, a script composed of various instructions and
arguments to automatically perform actions on a ba-
sic image. Starting from the same image it is then
possible to create multiple containers.
Kubernetes is an open source container orchestra-
tor used to automate the distribution, scaling and or-
chestration of container-based applications (Shah and
Dubaria, 2019). In Kubernetes, the pod is the funda-
mental element. It consists of a group of tightly cou-
pled containers located on the same host that share the
same IP address. Kubernetes guarantees reliability as
it can automatically restart containers that fail during
execution and terminate those that do not respond, al-
ways guaranteeing a certain number of containers in
execution.
3.2 Design and Study of Critical
Parameters
The design of the system is characterized primarily
by a study carried out in order to understand the la-
tency and reaction times necessary to avoid collisions
between vehicles, based on the examined traffic sce-
narios.
Two vehicles identified by an identifier number
(ID) are considered. In particular, the vehicle that
is ahead has ID = 0, while the one that follows has
ID = 1. For simplicity, in hourly laws, these IDs are
put as superscripts. Two vehicles travelling a stretch
of road at constant speed have the same deceleration
capacity ”a” and maintain a distance ”d” from each
other. It is assumed that the first vehicle for any rea-
son is forced to brake abruptly. With t
cr
is indicated
the sum of the latency time and the reaction time nec-
essary for the second vehicle to start braking. The
hourly law with instant started t
0
= 0 for the vehicle
with ID = 0 is as follows:
(
x
0
0
−
1
2
at
2
+ v
0
0
t t <
v
a
x
0
0
+
1
2
(v
0
0
)
2
a
t ≥
v
a
(1)
The hourly law with instant start t
0
= 0 for the vehicle
with ID = 1 is as follows:
(
x
1
0
+ v
1
0
t t < t
cr
x
1
0
+
v
1
0
+ at
cr
t −
1
2
a
t
2
+t
2
cr
t ≥ t
cr
(2)
Let suppose that due to braking vehicle 0 stopped its
run, it is possible to calculate the instant of collision
between vehicle 0 and vehicle 1 that follows, with the
assumption of consider equal the two paths traveled
by the vehicles.
x
0
0
+
1
2
(v
0
0
)
2
a
= x
1
0
+
v
1
0
+ at
cr
t −
1
2
a
t
2
+t
2
cr
(3)
Carrying out the calculations we obtain the following
second degree equation:
1
2
at
2
−
v
1
0
+ at
cr
t +
1
2
at
2
cr
+ d +
1
2
(v
0
0
)
2
a
= 0 (4)
This equation has solutions when the delta (∆) is
greater than 0, that is:
∆ =
v
1
0
+ at
cr
2
+
−4
1
2
a
1
2
at
2
cr
+ d +
1
2
(v
0
0
)
2
a
> 0
=⇒ t
cr
>
d
v
(5)
Therefore, to occur a collision between the two vehi-
cles, t
cr
must be greater than the ratio between dis-
tance and speed of the considered vehicles.
As regards the tools used in the realization, the
open source simulator Sumo (sum, 2019a) was cho-
sen to generate realistic vehicular traffic in the urban
environment, so as to have data from vehicles and
to be able to process them and the Eclipse develop-
ment environment to interface with the simulator and
to be able to program it using code written in Java
language, with the library called SumoTraciConnec-
tion (sum, 2019b).
SIMULTECH 2020 - 10th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
130

To carry out the communication between vehi-
cle and MEC server and between vehicle and Cloud
server, the CoAP protocol (Puangnak et al., 2019)
was chosen using the Californium library written in
Java (cal, 2019). Each vehicle was created as a CoAP
client, and periodically makes requests to the MEC or
Cloud server, as appropriate, which acts as a CoAP
server.
While the simulator and, therefore, the various
”vehicle” clients are running on a PC, the MEC server
was hosted in a Docker container in order to have all
the necessary dependencies and to be able to run it
on another PC. In order to guarantee reliability and
greater ease of use, the Docker container for the server
was managed by the Kubernetes orchestrator.
4 SYSTEM DEVELOPMENT
The development of the system consists first of all
in the implementation of vehicular traffic using the
SUMO simulator (Lim et al., 2017). Subsequently,
the implementation of the clients, that is, the commu-
nication from vehicles to server has been developed.
Finally, the implementation of the MEC server and,
therefore, the communication from server to vehicle
has been created. The final system is able to simulate
a traffic of vehicle that communicate between them
and with the server in order to manage a collision
avoiding mechanism and, so guaranteeing security on
the vehicular environment.
4.1 Vehicular Traffic with Sumo
In the realization of the system, in order to use Sumo,
a section of the road route related to the SS107 Silana-
Crotonese in Italy was initially downloaded and pro-
cessed with the command netConvert from the com-
mand line on windows, to obtain in output a xml type
file compatible with Sumo.
This file contains all the attributes relating to the
road portion. For example, there are the IDs related
to the two lanes of the roadway with the two travel
directions, the name of the considered road portion
and the maximum allowed speed expressed in m/s.
Subsequently, an XML type file was created to de-
fine the vehicles travelling on the previously chosen
road portion. For each vehicle it is possible to indi-
cate its acceleration and deceleration value, id, length,
maximum speed in m/s and minimum gap with the
previous vehicle, and so on.
Finally, in order to start the simulation, it was nec-
essary to generate the XML configuration file with the
.config extension. As input it takes the file related to
the road route, the file related to vehicles and an ad-
ditional file to display an alert on the map in case of
a collision between two vehicles. There is a time sec-
tion where the duration of the simulation with the step
is specified. It is also possible to output a file with the
simulation logs.
The implemented system follows a client-server
structure with CoAP communication. The Sumo sim-
ulator connected to Eclipse is used to manage client-
side communication, that is, it treats the vehicles that
are travelling in the map. This communication can be
only with a MEC server, only with a Cloud server or
characterized by a dynamic switching between MEC
Server and Cloud.
4.2 Communication Towards Edge or
Cloud
As regards the communication of the vehicle to the
server, in general, each one represents a CoAP client,
able to send information to the server through the
POST method of the Californium library (Kovatsch
et al., 2014). The information is enclosed in a mes-
sage and relates to the status of the vehicle, such as
id, speed and position. Furthermore, every command
that the vehicles receive from the server is managed to
pass it to the simulator. In order to realize this process,
a Java class has been implemented which contains the
logic related to the vehicle.
Briefly, the behavior of the individual vehicle is
shown in the following flow chart, figure 2.
4.3 Dynamic Switching Edge - Cloud
The implementation of the dynamic switching algo-
rithm has the aim of not overloading the Edge server
when it is not essential, deviating part of the traffic
to a Cloud server. In particular, each vehicle can de-
cide whether to communicate with the Cloud server
or with the MEC server, so that the roadside device
will receive fewer packets number since part of these
will be managed by the Cloud. The decision made by
the vehicle depends on the current vehicle traffic con-
ditions, with the aim of keeping the collisions number
as low as possible. Once the previous and the next ve-
hicle of a generic vehicle have been identified, this
performs a calculation in order to understand what
communication to establish, if it is better communi-
cate with the edge or cloud server. Since the instant
of collision between two vehicles depends on the total
time between latency and reaction, and the reaction,
as shown in the study done previously, for the same
amount of deceleration and speed between the vehi-
cles must be greater of the distance ratio between two
Proposal of an Automotive Collision Avoidance System based on Edge Computing
131

Figure 2: Flow chart of the behavior of a vehicle.
vehicles and the speed for collision, this ratio is con-
sidered in the calculation made by the vehicle with
respect to the following and previous vehicle in order
to choose the server. If in at least one of the two cases,
the ratio is less than the total time between the latency
of the Cloud and the reaction of the vehicle, it means
that communication to the Edge is necessary other-
wise there would be a collision choosing the Cloud.
Otherwise, communication with the Cloud is chosen.
In general, the algorithm is described by the following
flow chart, figure 3.
As regards incoming communications, each vehi-
cle must check whether it has received warnings from
both the Cloud server and the MEC server. Therefore,
two CoapHandlers procedure were needed to manage
both communications asynchronously.
4.4 Server MEC
The role of the MEC server on the roadside, in the
implemented application, is to receive data from trav-
elling vehicles, process it to understand if there is a
danger or emergency braking by a vehicle, and imme-
diately notify all vehicles that follow in order to avoid
collisions. Everything is summarized in the handle-
POST method which manages every single commu-
Figure 3: Flow chart relating to dynamic switching.
nication with the client. After accepting the commu-
nication, the server decodes the received message and
performs calculations to understand if the vehicle is
braking abruptly. In particular, it makes the differ-
ence between two consecutive vehicle speeds, and if
this difference is greater than a certain threshold, it is
identified as a dangerous condition. Therefore in this
case, the server identifies all the vehicles that are ar-
riving within a certain range, in order to alert them in
time and avoid collisions. The operating principle is
described briefly in the following figure 4.
Figure 4: Flow chart relating to the behavior of the MEC
server.
Once the Java Server code was realized, a Docker
container could be created. This latter was then pub-
lished on a private repository created in the Docker
Hub registry so that it can be managed with Kuber-
netes. In Kubernetes a deployment has been created
where a pod characterized by the single container is
declared. Finally, a service has been created to make
the pod accessible.
SIMULTECH 2020 - 10th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
132
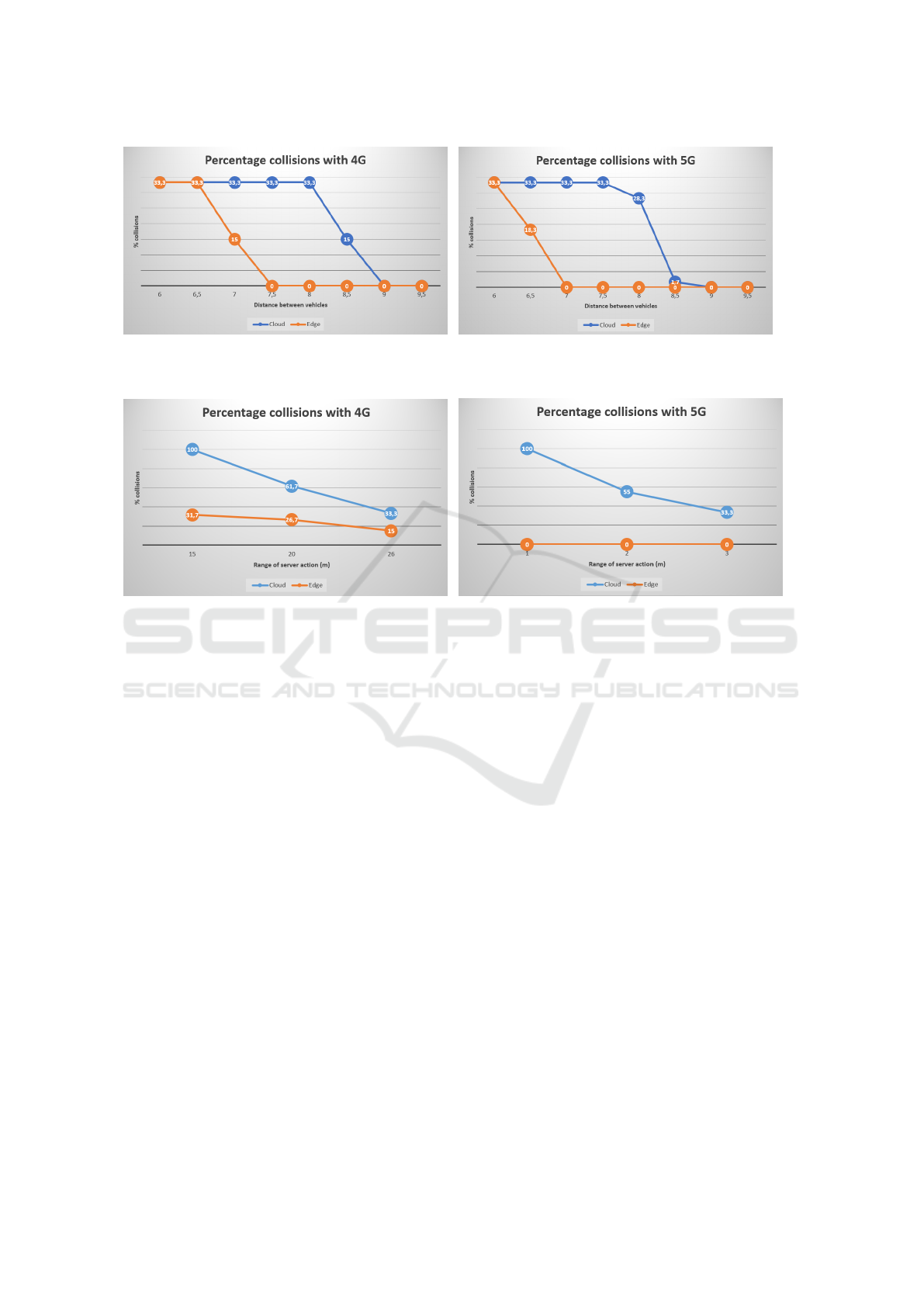
(a) (b)
Figure 5: Percentage of Collisions with 4G and 5G network varying vehicles distance.
(a) (b)
Figure 6: Percentage of Collisions with 4G and 5G network varying server range action.
5 PERFORMANCE ANALYSIS
To understand the performance of the implemented
system, several simulation tests were carried out.
Firstly, the collisions percentage between vehicles
varying the distance between them, using first com-
munication with MEC Server and then with Cloud
Server, considering 4G and 5G technology was as-
sessed. In particular, both technologies have been
used from a simulation point of view, considering the
latency times that characterize each of them. The sce-
nario considered to make the measurements is as fol-
lows: four vehicles at a distance ”d” from each other,
with constant speed equal to 50 km/h, same deceler-
ation values, random reaction times between 450 ms
and 500 ms (Makridis et al., 2018) and a range of ac-
tion of the server equal to 50 m from the point where
the hazard event was generated. The first vehicle at
a certain moment is forced to brake suddenly. The
distances ”d” expressed in meters and taken into con-
sideration are: 6, 6.5, 7, 7.5, 8, 8.5, 9, 9.5. Twenty
runs were carried out for each configuration consid-
ering first the communication with the MEC server
(4G and 5G) and then with the Cloud server (4G and
5G). The results obtained are shown in the following
graphs, see figure 5.
As it is possible to appreciate, considering the
same distance between two vehicles, the percent-
age of collisions that characterizes communication
with the Edge is lower than communication with the
Cloud. Furthermore, considering first 4G and then
5G, in some cases the number of collisions for the
same distance between two vehicles decreases. Sub-
sequently, the percentage of collisions between vehi-
cles was evaluated, no longer changing the distance
between two, but varying the range of action of the
server with respect to the point where the hazard event
was generated. The scenario considered is as follows:
four vehicles at a distance of 7 m from each other,
with a constant speed of 50 km/h, same deceleration
values, random reaction times between 450 ms and
500 ms (Makridis et al., 2018) and a range of action of
the server equal to ”r” meters with respect to the point
where the hazard event was generated. The first vehi-
cle at a certain moment is forced to brake suddenly.
The ranges used expressed in meters are: 15, 20, 26.
These values have been chosen respectively to ensure
that the server once only warns the vehicle following
the one that suddenly brakes, then the next two and fi-
nally all three vehicles that follow. Twenty runs were
Proposal of an Automotive Collision Avoidance System based on Edge Computing
133

carried out for each configuration considering first the
communication with the MEC server (4G and 5G) and
then with the Cloud server (4G and 5G). The results
obtained are those shown in the figure 6. As you can
see, both using 4G and 5G technology, and consid-
ering communication with the Cloud server and with
the MEC server, as the range of action of the server in-
creases, the percentage of collisions decreases. This
happens because a vehicle warned in time of the dan-
ger will start braking earlier avoiding collision with
the previous vehicle. Therefore the more vehicles are
warned by the server, the lower the collision rate. An-
other parameter that has been evaluated is the percent-
age of use of the Cloud and MEC servers in dynamic
switching. This algorithm allows, especially in cer-
tain vehicular traffic conditions, not to overload the
Edge and communicate with the Cloud server which
has higher performance. Three scenarios are consid-
ered in the evaluation, starting from one that is not
congested up to the congested one, as shown in the
figures 7a, 7b and 7c and the communication is made
towards cloud or edge server on the basis of latency
issues.
(a)
(b)
(c)
Figure 7: (a) Uncongested Vehicular Traffic; (b) Low Traf-
fic Congestion; (c) Congested Vehicular Traffic.
6 CONCLUSIONS
In the paper, the attention was focused to the service
delivery paradigm called Edge Computing, realizing
a specific use case that demonstrates its importance.
In particular, an assisted guidance system for colli-
sion prediction has been developed and it has been
shown how the use of Edge technology is essential in
some circumstances where the latency parameter that
characterizes communications must be very low. This
is because, with Edge Computing, each Cloud func-
tionality moves close to the end user and therefore to
the edge of the network. Therefore in the system it
was necessary to implement an MEC server to man-
age communications with vehicles, run on a Docker
container managed by the Kubernetes orchestrator. In
order to show the improvements of Edge Comput-
ing compared to Cloud Computing, a comparison has
been made between the communication of a vehicle to
the Egde server and to the Cloud server, evaluating the
percentage of collisions of the vehicles. Obviously,
communication with the Edge allows to significantly
reduce the number of collisions as it guarantees min-
imum latency. It has also been demonstrated from a
simulation point of view how in some cases the MEC-
5G combination is essential for this type of system.
REFERENCES
(2019). Docker: Empowering app development for devel-
opers. https://www.docker.com/.
(2019). Eclipse californium (cf) coap framework. https:
//www.eclipse.org/californium/.
(2019). Kubernetes: Production-grade container orchestra-
tion. https://kubernetes.io/.
(2019a). Sumo - simulation of urban mobility. http://sumo.
sourceforge.net/.
(2019b). Sumotraciconnection. https://sumo.dlr.de/javadoc/
traas/it/polito/appeal/traci\\/SumoTraciConnection.
html.
Ahmed, A. and Pierre, G. (2018). Docker container de-
ployment in fog computing infrastructures. In 2018
IEEE International Conference on Edge Computing
(EDGE), pages 1–8. IEEE.
Bernstein, D. (2014). Containers and cloud: From lxc
to docker to kubernetes. IEEE Cloud Computing,
1(3):81–84.
De Rango, F., Fazio, P., and Marano, S. (2008). Utility-
based predictive services for adaptive wireless net-
works with mobile hosts. IEEE Transactions on Ve-
hicular Technology, 58(3):1415–1428.
De Rango, F., Veltri, F., Fazio, P., and Marano, S. (2009).
Two-level trajectory-based routing protocol for vehic-
ular ad hoc networks in freeway and manhattan envi-
ronments. Journal of Networks, 4(9):866–880.
SIMULTECH 2020 - 10th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
134

Fazio, P., De Rango, F., Tropea, M., and Voznak, M.
(2017a). Cell permanence time and mobility anal-
ysis in infrastructure networks: Analytical/statistical
approaches and their applications. Computers & Elec-
trical Engineering, 64:506–523.
Fazio, P., Sottile, C., Santamaria, A. F., and Tropea,
M. (2013). Vehicular networking enhancement and
multi-channel routing optimization, based on multi-
objective metric and minimum spanning tree. Ad-
vances in Electrical and Electronic Engineering,
11(5):349–356.
Fazio, P., Tropea, M., De Rango, F., and Voznak, M. (2016).
Pattern prediction and passive bandwidth manage-
ment for hand-over optimization in qos cellular net-
works with vehicular mobility. IEEE Transactions on
Mobile Computing, 15(11):2809–2824.
Fazio, P., Tropea, M., and Marano, S. (2017b). Node re-
routing and congestion reduction scheme for wireless
vehicular networks. Wireless Personal Communica-
tions, 96(4):5203–5219.
Fotino, M., Gozzi, A., Cano, J.-C., Calafate, C., De Rango,
F., Manzoni, P., and Marano, S. (2007). Evaluating
energy consumption of proactive and reactive routing
protocols in a manet. In IFIP Conference on Wireless
Sensor and Actor Networks, pages 119–130. Springer.
Frnda, J., Voznak, M., Rozhon, J., and Mehic, M.
(2013). Prediction model of qos for triple play ser-
vices. In 2013 21st Telecommunications Forum Telfor
(TELFOR), pages 733–736. IEEE.
Giust, F., Sciancalepore, V., Sabella, D., Filippou, M. C.,
Mangiante, S., Featherstone, W., and Munaretto, D.
(2018). Multi-access edge computing: The driver be-
hind the wheel of 5g-connected cars. IEEE Commu-
nications Standards Magazine, 2(3):66–73.
Jain, N. and Choudhary, S. (2016). Overview of virtu-
alization in cloud computing. In 2016 Symposium
on Colossal Data Analysis and Networking (CDAN),
pages 1–4. IEEE.
Khelil, A. and Soldani, D. (2014). On the suitability
of device-to-device communications for road traffic
safety. In 2014 IEEE World Forum on Internet of
Things (WF-IoT), pages 224–229. IEEE.
Kovatsch, M., Lanter, M., and Shelby, Z. (2014). Cali-
fornium: Scalable cloud services for the internet of
things with coap. In 2014 International Conference
on the Internet of Things (IOT), pages 1–6. IEEE.
Lim, K. G., Lee, C. H., Chin, R. K. Y., Yeo, K. B., and Teo,
K. T. K. (2017). Sumo enhancement for vehicular ad
hoc network (vanet) simulation. In 2017 IEEE 2nd
International Conference on Automatic Control and
Intelligent Systems (I2CACIS), pages 86–91. IEEE.
Makridis, M., Mattas, K., Borio, D., Giuliani, R., and
Ciuffo, B. (2018). Estimating reaction time in adap-
tive cruise control system. In 2018 IEEE Intelligent
Vehicles Symposium (IV), pages 1312–1317. IEEE.
Pham, Q.-V., Fang, F., Ha, V. N., Le, M., Ding, Z., Le,
L. B., and Hwang, W.-J. (2019). A survey of multi-
access edge computing in 5g and beyond: Funda-
mentals, technology integration, and state-of-the-art.
arXiv preprint arXiv:1906.08452.
Porambage, P., Okwuibe, J., Liyanage, M., Ylianttila, M.,
and Taleb, T. (2018). Survey on multi-access edge
computing for internet of things realization. IEEE
Communications Surveys & Tutorials, 20(4):2961–
2991.
Puangnak, K., Puisamlee, W., Puangnak, K., and Rach-
siriwatcharabul, N. (2019). Evaluation of mqtt and
coap for vehicle traffic monitoring. In 2019 16th
International Conference on Electrical Engineer-
ing/Electronics, Computer, Telecommunications and
Information Technology (ECTI-CON), pages 915–
918. IEEE.
Santamaria, A. F., Fazio, P., Raimondo, P., Tropea, M.,
and De Rango, F. (2019). A new distributed predic-
tive congestion aware re-routing algorithm for co 2
emissions reduction. IEEE Transactions on Vehicular
Technology, 68(5):4419–4433.
Santamaria, A. F., Tropea, M., Fazio, P., and De Rango,
F. (2018). Managing emergency situations in vanet
through heterogeneous technologies cooperation. Sen-
sors, 18(5):1461.
Shah, J. and Dubaria, D. (2019). Building modern clouds:
using docker, kubernetes & google cloud platform. In
2019 IEEE 9th Annual Computing and Communica-
tion Workshop and Conference (CCWC), pages 0184–
0189. IEEE.
Sharma, S. et al. (2019). Vehicular ad-hoc network: An
overview. In 2019 International Conference on Com-
puting, Communication, and Intelligent Systems (IC-
CCIS), pages 131–134. IEEE.
Socievole, A., De Rango, F., and Coscarella, C. (2011).
Routing approaches and performance evaluation in
delay tolerant networks. In 2011 Wireless Telecom-
munications Symposium (WTS), pages 1–6. IEEE.
Song, W. and Jiang, B. (2015). Visualization of iov warning
data based on warning velocity association model. In
2015 8th International Symposium on Computational
Intelligence and Design (ISCID), volume 2, pages 30–
33. IEEE.
Xiong, K., Leng, S., He, J., Wu, F., and Wang, Q. (2019).
Recouping efficient safety distance in iov-enhanced
transportation systems. In ICC 2019-2019 IEEE In-
ternational Conference on Communications (ICC),
pages 1–6. IEEE.
Yang, F., Wang, S., Li, J., Liu, Z., and Sun, Q. (2014). An
overview of internet of vehicles. China communica-
tions, 11(10):1–15.
Zhou, B., Lee, Y.-Z., Gerla, M., and De Rango, F. (2006).
Geo-lanmar: a scalable routing protocol for ad hoc
networks with group motion. Wireless Communica-
tions and Mobile Computing, 6(7):989–1002.
Proposal of an Automotive Collision Avoidance System based on Edge Computing
135
