
DCNN-based Screw Classification in Automated Disassembly Processes
Erenus Yildiz
a
and Florentin W
¨
org
¨
otter
b
III. Physics Institute, Georg-August University of G
¨
ottingen, Germany
Keywords:
Screw Classification, Automation, Disassembly, Recycling, E-Waste.
Abstract:
E-waste recycling is thriving yet there are many challenges waiting to be addressed until high-degree, device-
independent automation is possible. One of these challenges is to have automated procedures for screw clas-
sification. Here we specifically address the problem of classification of the screw heads and implement a
universal, generalizable, and extendable screw classifier which can be deployed in automated disassembly
routines. We selected the best performing state-of-the-art classifiers and compared their performance to that
of our architecture, which combines a Hough transform with the top-performing state-of-the-art deep convo-
lutional neural network proven by our experiments. We show that our classifier outperforms currently existing
methods by achieving 97% accuracy while maintaining a high speed of computation. Data set and code of this
study are made public.
1 INTRODUCTION
A very significant and challenging quest of the last
three decades has been E-Waste recycling. Aside
from being environmentally friendly, the challenge is
also economically rewarding and scientifically inter-
esting. Every year the life cycles of electronic prod-
ucts are slightly decreasing (Solomon et al., 2000),
leading to massive amounts of valuable raw materi-
als if they are recycled. On the other hand, the in-
creased pace of production in electronic device indus-
try inevitably motivates us to look for new technolo-
gies and paradigms to bring a possible solution to the
automated recycling challenge. According to recent
statistics, only 20% of the E-Waste are recycled (Kah-
hat et al., 2008). There are many reasons behind this
ratio, however, here we focus on the aspects where the
AI community could contribute to a possible solution.
Currently most of the recycling paradigms follow a
destroy-then-melt strategy, without much intelligence
involved. Intelligent automation could not only in-
crease the percentage of recycling, it could also let
better recycling paradigms evolve.
Economical reasons are definitely not the only
reasons to push forward for automated recycling. Ac-
cording to a recent study (Jahanian et al., 2019),
melting 1 million phones could potentially recover
16,000kg of copper, 350kg of silver, 34kg of gold
a
https://orcid.org/0000-0002-3601-7328
b
https://orcid.org/0000-0001-8206-9738
and 15kg of Palladium. However, this type of solu-
tion usually causes environmental and health hazards
in and around disassembly plants. Additionally, they
ignore the possibility of finer recycling due to the fact
that they prefer low-cost rather than higher revenue.
Then, ultimately, there is a necessity of building intel-
ligent solutions to automate detection and categoriza-
tion of objects that are pivotal to the disassembly rou-
tines such as screws, so that the autonomous robotic
manipulation tasks (i.e. unscrewing) are carried out
successfully.
It is indeed an interesting problem to look into
since it is challenging to address detection and classi-
fication of screw heads due to their different designs.
Consider a computer hard drive containing screws of
different types and sizes, posing a great challenge of
finding features with high accuracy to automate the
unscrewing action, which is frequently carried out by
humans. Screws have fixed poses (thus limited view-
points) and only their heads are visible to the captur-
ing sensor, making it a problem of analysing the fea-
tures available on the head surface to figure out the
type and size information. These features are some-
times really challenging to catch due to the small sizes
of the screw heads (i.e. Torx7 vs. Torx8). Addition-
ally, they are not only small, but also shiny objects
and, thus, reflecting much of the light. All in all, it
becomes really difficult to capture all the necessary
information with an effective precision without using
a several-thousand-dollar high-end line-laser.
Yildiz, E. and Wörgötter, F.
DCNN-based Screw Classification in Automated Disassembly Processes.
DOI: 10.5220/0009979900610068
In Proceedings of the International Conference on Robotics, Computer Vision and Intelligent Systems (ROBOVIS 2020), pages 61-68
ISBN: 978-989-758-479-4
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
61

Figure 1: We present a universal, extendable, RGB based
screw head classifier scheme which is engineered for auto-
mated disassembly tasks. Our scheme uses a Hough trans-
form and two state-of-the-art deep convolutional neural net-
works. Green circles represent predicted screw type, red dot
and font represent the ground truth.
In this paper, a visual screw head classification
scheme based on a combination of deep learning
methods empowered with classical computer vision
methods is proposed. The proposed scheme can be
seen as an extension of a previous scheme devel-
oped by us (Yildiz and W
¨
org
¨
otter, 2019) to detect
screws. We take the work even further now by mak-
ing it able to classify the screw type and size. We
use the well known Hough transform to first gener-
ate screw-candidates (screws and circular artefacts),
which are then filtered out by our previous screw de-
tector model, yielding only screws. Afterward, we
feed the screws into our DCNN powered classifier,
chosen via our experimental evaluation of the top
state-of-the-art models. The scheme can account for
any type of screw size and type as long as the user
collects enough data in the offline mode for train-
ing. As it was in our previous work, we keep the
feature of data collection. Contrary to state-of-the-
art techniques, which require users to find datasets
from search engines for their specific requirements
(viewpoint, height, etc.), we let users create their own
datasets, given the device and camera. This mitigates
the problem of finding specific datasets for screw
types and sizes, and ensures high accuracy for the net-
work.
Therefore, the most significant contribution of this
paper is the fusion of features acquired from classical
computer vision methods and the deep learning model
that trains on the data collected by the user in a semi-
automated way. To our knowledge, we are the first to
utilise this kind of fusion to classify 12 different screw
head types.
We examine the performance of our proposed
scheme in different situations and the extent of gener-
alization for effective automation and robotics usage
in disassembly. For our experiments, we have col-
lected approximately 35000 training images of differ-
ent screw head types and sizes. Additionally, 50 sam-
ple scenes of various disassembly stages of computer
hard drives were collected to test the pipeline.
2 RELATED WORK
There have been several studies researched under the
topic of automated disassembly (Weigl-Seitz et al.,
2006; Dr
¨
oder et al., 2014; Wegener et al., 2015) which
yielded some schemes (Elsayed et al., 2012; Pomares
et al., 2004; Bdiwi et al., 2016; B
¨
uker et al., 2001)
for automating certain processes. However, these
schemes do not generalize and pose as universal solu-
tions for the problem of classification of screw heads.
Basically, the problem of screw head classification is
not even addressed yet by the community. There are
some works that involve template matching methods
to find the screws on metal ceiling structures for dis-
mantling of certain objects (Ukida, 2007). However,
template matching operates on a fixed template that
looks for a pixel-level match with the target, making
it an extremely undesirable paradigm for cases where
lightening or the object’s color changes. It is there-
fore impossible to account for all screw heads of all
ROBOVIS 2020 - International Conference on Robotics, Computer Vision and Intelligent Systems
62
colors, sizes, lightening conditions by using template-
matching based methods, making it an impossible
scheme for automated disassembly. An interesting at-
tempt came with the goal of detecting M5 bolts on
battery joints in electric vehicle battery disassembly
routines (Wegener et al., 2015). Using a Haar-type
cascade classifier trained on cropped images of M5
bolts, adding false positives detected from the clas-
sifier under negatives, the authors were only able to
achieve 50% detection accuracy for only one type of
bolts. Such low accuracy does not constitute a viable
solution for a disassembly routine, thus making the
method impractical for industrial use.
The last work we would like to mention also fo-
cused on autonomous disassembly of electric vehi-
cle motors (Bdiwi et al., 2016). In this work, screws
found on electric vehicle motors were detected using
an RGB-D sensor (Kinect) (Zhang, 2012). Although
the proposed algorithm is scale, rotation, and transla-
tion invariant, it heavily relies on traditional computer
vision methods such as Harris corner detection and
HSV image analysis. It is a well known fact that these
methods are easily affected by the lighting conditions
and do not generalize. Another shortcoming is the
fact that they require a depth image from the RGB-D
sensor to remove false positives such as holes, which
adds computational load, yet again for merely detect-
ing a screw, not classifying its type and size.
Thus, it seems that there is still a substan-
tial lack in generalizable, device and environment-
independent methods to detect and classify screw
heads, which can be used in automated disassembly
processes.
3 METHOD
In this section we explain each block in our pipeline.
However, before doing that, we would like to inform
the reader about the setup our scheme requires. We
propose a setup in which the camera faces the device’s
surface perpendicularly. The distance between the de-
vice and the camera was 75 cm, however, depending
on the size of the device, this distance may change.
Since we worked with computer hard drive screws,
75 cm was a suitable height.
We keep the pipeline we inherit from our previous
work(Yildiz and W
¨
org
¨
otter, 2019), and add a classifi-
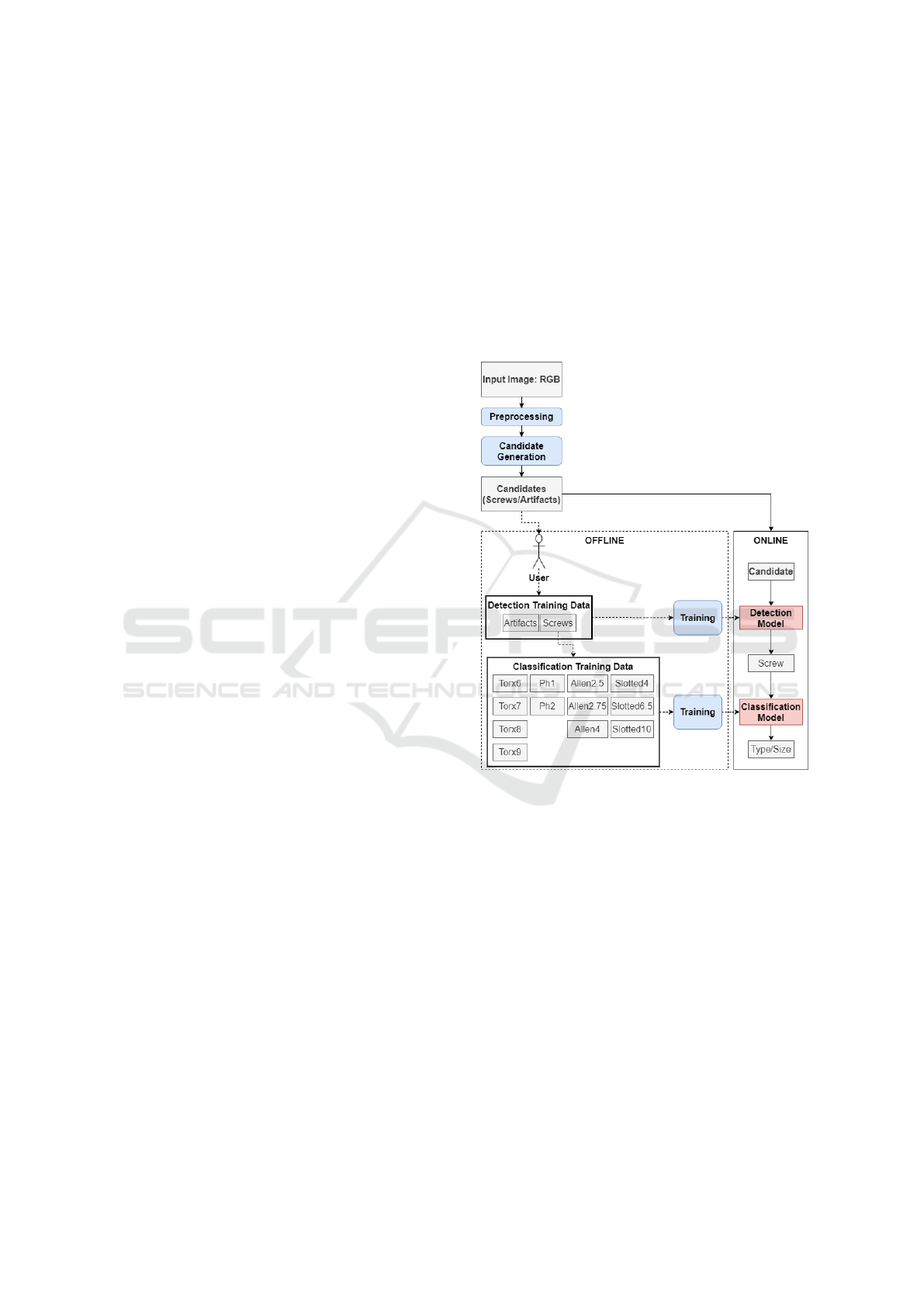
cation block to it, as illustrated in Fig. 2. Our previous
work enables the user to collect training data by crop-
ping circular candidates from the scene. The cropped
circular candidates are then to be divided into their
respective classes (artifact, Torx8, Ph2, Slotted6.5,
Allen2.75, etc.) by a human.
Afterward, first the detector model can be trained
to classify screws from artefacts (circular non-screws
structures), as we explained in our previous work
(Yildiz and W
¨
org
¨
otter, 2019). Having deployed a
model that can differentiate screws from artefacts,
now we can train and deploy our new classifier, that
can classify 12 different types of screw heads. Our
scheme then marks and returns the type/size informa-
tion and locations of the screws seen in the image.
3.1 Preprocessing
Figure 2: The pipeline in our scheme is composed of online
and offline stages. Online stage employs models to differen-
tiate screws from artefacts, as well as to classify the screws.
The preprocessing step is directly taken from our pre-
vious work (Yildiz and W
¨
org
¨
otter, 2019), where clas-
sical computer vision is first used to crop the image
to only the region where the device is visible, and
grayscale it.
3.2 Candidate Generation
E-Waste is a vast category of devices with different
structures and materials. A possible screw head clas-
sifier should therefore account for all or most of the
screws encountered in the disassembly domain. In
order to come up with a scheme that has reasonable
levels of generalisation ability. We analyzed differ-
ent types of screws found in the domain of E-Waste.
To make sure that our method will cover the most en-
DCNN-based Screw Classification in Automated Disassembly Processes
63

countered and conventionally used screw types found
in this domain, we have consulted experts from the
disassembly plant in cooperation with our university
and agreed on 12 types of screw heads such as dif-
ferent sizes of Torx, Philips, Slotted and Allen heads.
We assessed various electronic devices, which can be
found in huge numbers nowadays in E-Waste, such as
computer hard drives, DVD players, gaming consoles
and many more. As anticipated, we concluded that
almost all screws in this domain are circular, which is
the natural geometry of these objects and represents
the central feature to be utilised to detect a screw ob-
ject. Fig. 3 illustrates samples of screw types/sizes
classified in our dataset. It must be underlined that
there are also non-circular screws manufactured, how-
ever, those are few and we found no such screws in the
devices of interest in the disassembly plant we coop-
erate with. We therefore based our method on first
finding circular structures in the images. Clearly, not
every circular structure is a screw, for example stick-
ers, holes, transistors, etc. exist, which are also circu-
lar, but not screws. Nevertheless, circular structures
provide us with priors for screws and the first step of
our method is to collect those screw-candidates.
Figure 3: Screw types encountered during the disassembly
of various electronic devices found in E-Waste. Last row
depicts artefacts that count as another type in classification.
We use the base candidate generator from our pre-
vious work (Yildiz and W
¨
org
¨
otter, 2019), in order
to collect candidates. We run our program in offline
mode and rely on the Hough Transform for candidate
detection. This is a standard computer vision method
for circle detection (Duda and Hart, 1971) and shall
not be explained here. Differing from the standard
Hough Transform here we use a version, relying on
the so called Hough Gradient (of the OpenCV library
(Bradski and Kaehler, 2008)). This version uses the
gradient information of the edges that form the cir-
cle. We refer the reader to the handbook published
by the creators of the aforementioned library for fur-
ther implementation details on the algorithm of the
Hough Gradient. It should be noted that after col-
lecting our candidates, we then switch back to RGB
from grayscale, since our classifiers operate far better
in colored images than in grayscaled ones.
3.3 Training the Classifiers
As mentioned before, the user manually separates
screw types and artifacts by which a classifier can be
trained using these positive and negative examples as
training data. In Fig. 3 types of screw heads and ar-
tifacts taken from various devices found in E-Waste
are shown. In general, these screws are found in other
device-classes and, thus, the resulting training set can
be transferred also to other devices. In that case, how-
ever, one has to increase the number of samples to
account for more types of screws.
We have investigated state-of-the-art classifiers
found in the literature and we picked the three top-
performing ones for comparison at the end. These
networks, to our experience, were performing toler-
ably good given a not so large dataset for a specific
device-class (hard drives of any size). Finally, we de-
cided to evaluate EfficientNets (Tan and Le, 2019),
ResNets (He et al., 2016), DenseNets (Huang et al.,
2017), scoring top accuracies on the ImageNet (Deng
et al., 2009). Additionally, EfficientNets have been
used in the latest works (Xie et al., 2019) in pur-
suit of improving ImageNet classification, by using a
new self-traning method called Noisy Student Train-
ing. Inspired by this effort, we chose EfficientNetB2.
Our strategy to evaluate the networks is described
as follows. We go by the standard procedure for trans-
fer learning: cutting the pre-trained model on the last
convolutional layer and adding a new sequence of lin-
ear layers called the head. We use this head architec-
ture for all models we explore. In the first 10 epochs,
we train only the added final layers of the model by
freezing all convolutional layers, not allowing any up-
dates to their weights. Afterward, we unfreeze all lay-
ers and train the entire network. We find it useful to
use differential learning rates at this stage. It is not de-
sired to change the early layers of the models as much
as the later ones, therefore lower learning rates are
used in the first layers and higher ones in the end. Us-
ing the Adam optimizer (Kingma and Ba, 2014) with
the learning rate of 1 ×10
−5
. Figure 4 illustrates the
model architecture we use. Here, the term ”Block” is
a higher abstraction used for group of layers.
To further reduce overfitting and to come up with
a model that can generalize, we applied an additional
data augmentation step. There are several data aug-
mentation operations we applied to introduce more
variety in the data such as rotation, brightness and
contrast.
ROBOVIS 2020 - International Conference on Robotics, Computer Vision and Intelligent Systems
64
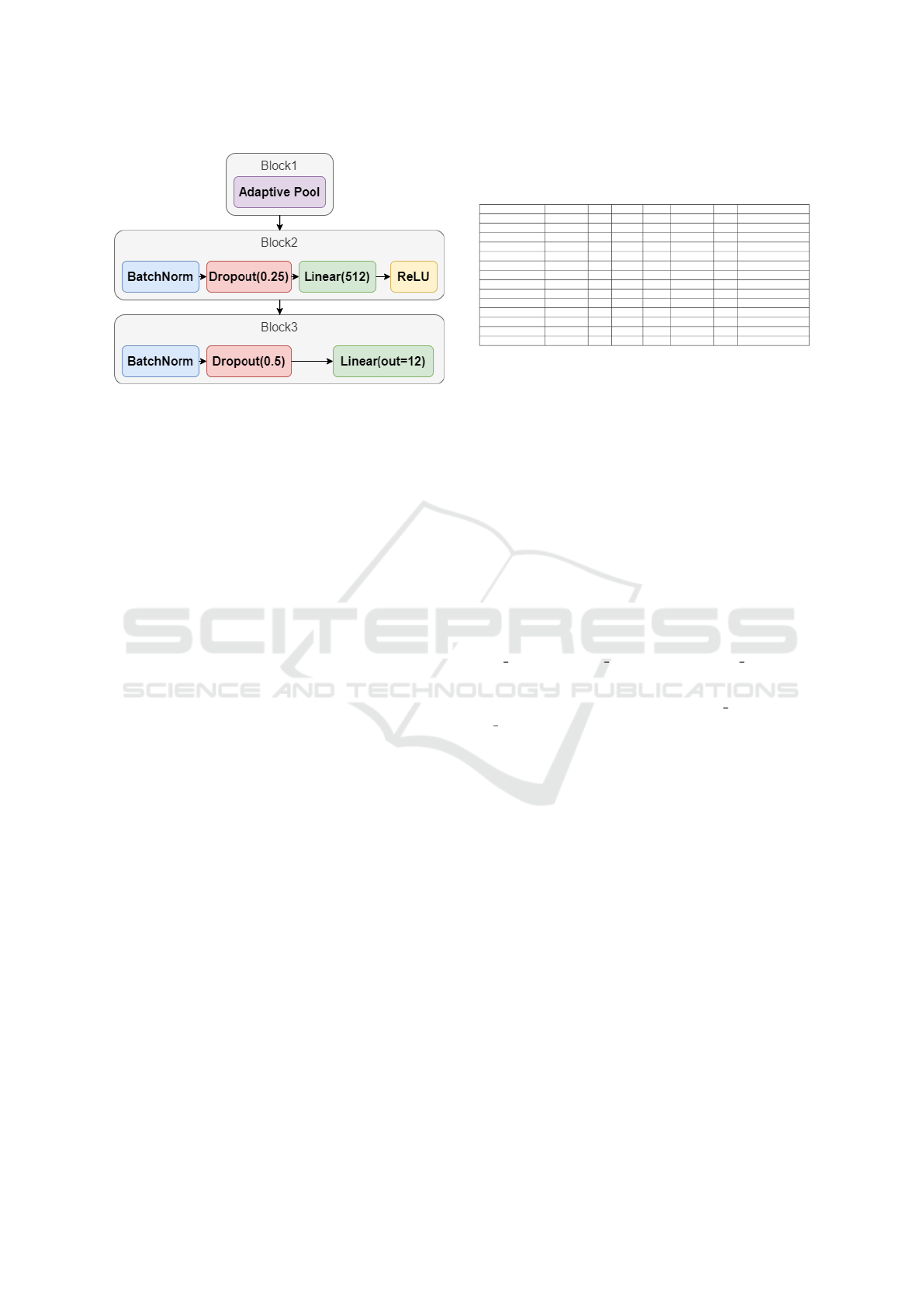
Figure 4: Head architecture of the model.
4 EXPERIMENTAL EVALUATION
We conducted several experiments on the test data we
collected. Out of the top three state-of-the-art classi-
fiers, we picked the best performing one, namely Effi-
cientNetB2 -one of the best performing models given
Noisy Student weights- and used it in the pipeline
seen in Fig. 2. Below we also provide details of
the experimental evaluation and present our justifica-
tion for our decision of picking the one we use in our
pipeline.
4.1 Experimental Environment
For the evaluation of the screw classifiers, we col-
lected a dataset of over 20000 samples and split it
into training and validation sets with the ratio of 2:1.
We use a computer with Intel Core i7-4770 CPU @
3.40GHz, 16GB of RAM with GeForce GTX Titan X
graphics card to train the classifiers. For evaluation of
the performance of our entire pipeline, we collected
approximately 50 hard drive images containing over
500 screw-like elements as the test set the model has
never seen before.
4.2 Experimental Metrics
Our pipeline is composed of two main blocks, namely
the Hough circle detector and our classifier, Efficient-
NetB2. It is required to assess the detection as well
as the classification abilities of the entire pipeline.
To this end, we went by the following strategy: We
first annotated the test images, each having only one
hard drive with top-down view. These images contain
drives with or without screws, by which the Hough
circle finder could be assessed. We annotated these
scene images by marking screws with squares, which
would form our ground truth for assessing the Hough
Table 1: Accuracy of the state-of-the-art models with huge
variation of hyperparameters. Highlighted ones are the top
three performing ones.
Model Grayscale Size Loss Acc. Min. Acc. F1 Transfer Learning
EfficientNetB2A No 256 0.1187 0.968 0.79 0.97 Noisy Student
EfficientNetB2A No 64 0.2144 0.936 0.78 0.93 ImageNet
EfficientNetB2A No 128 0.1871 0.951 0.85 0.95 ImageNet
EfficientNetB2A Yes 128 0.2199 0.948 0.67 0.94 ImageNet
EfficientNetB3A Yes 64 0.2072 0.937 0.75 0.93 ImageNet
EfficientNetB3A No 64 0.2051 0.939 0.74 0.94 ImageNet
DenseNet121 No 128 0.1415 0.961 0.81 0.96 ImageNet
DenseNet121 Yes 128 0.1489 0.957 0.74 0.95 ImageNet
DenseNet121 No 64 0.1896 0.937 0.72 0.93 ImageNet
DenseNet121 No 64 0.2306 0.934 0.71 0.93 ImageNet
DenseNet201 No 256 0.1170 0.966 0.79 0.96 ImageNet
ResNet34 No 128 0.1538 0.955 0.80 0.95 ImageNet
ResNet34 Yes 128 0.2026 0.951 0.69 0.95 ImageNet
ResNet50v2 No 256 0.1732 0.942 0.73 0.94 ImageNet
circle finder’s accuracy. We went by the standard
VOC evaluation (Everingham et al., 2010) and we
found our Hough circle detector to work with 0.783
mean IoU with the optimal parameters found for our
setup. IoU here refers to what amount of screw region
is correctly detected by the Hough circle finder. If the
detected region for a screw is below 70% it’s bound
to result in bad prediction for both detection and clas-
sification. It must be also noted that our pipeline is
limited by the accuracy of Hough, since if the circle
finder cannot catch the circle, then the classifier’s ac-
curacy does not matter at all. The accuracy of Hough
circle detection can vary depending on the parame-
ters of the function such as min/max radius, min/max
threshold. Inevitably, final accuracy of our pipeline
can be calculated as follows:
Acc Pipeline = Acc CircleDetector ∗Acc Classi f ier
For the evaluation of the classifier, we consider the
standard metrics of loss, accuracy, min accuracy and
f1 score.
4.3 Experimental Results
We summarize the experimental results with regards
to performance of each classifier against the valida-
tion set in Table 1. Note that we are selecting what
model to use in this part of our experiments. Using
the test dataset would cause overfitting of the hyper-
parameters.
From the collected results in Table 1, one can con-
clude the following: All of the investigated models
achieve very high accuracy - over 90% on the test-
ing data, with the model EfficientNetB2 scoring the
highest min. accuracy of 85% among single models.
Additionally, we emphasize that augmentation strat-
egy plays a pivotal role in the classifier accuracy. Es-
pecially for circular objects, rotation guarantees that
the traning data accounts for screws that are rotated
for each angle. Using the Albumentations (Buslaev
et al., 2020) library applied a rotation of 360 degrees,
horizontal and vertical flips, as well as brightness and
contrast changes.
DCNN-based Screw Classification in Automated Disassembly Processes
65

Figure 5: Confusion matrix acquired through our experi-
ments.
We then employ the final model in our pipeline
and evaluate it on our test dataset. Fig. 6 shows the
precision-recall curve of our classifier, whereas Fig. 5
illustrates the confusion matrix. Our pipeline achieves
an AP of 0.757. The reason why our classifier accu-
racy is higher than our AP is due to the Hough cir-
cle finder, which succeeds by approximately 75% of
the time, limiting our pipeline’s overall AP. This can
be mentioned as the only limitation of our pipeline.
Fig. 7 illustrates the detection and classification of the
screws found on a Hitachi Deskstar 3.5” hard drive
during the disassembly.
Figure 6: Precision-Recall curve for the final model for our
classifier.
5 DISCUSSION AND
CONCLUSIONS
In this study we tackled the fundamental problem
of screw head classification in disassembly environ-
ments. The problem itself is a challenging one, since
screw heads have variable sizes, types and not every
electronic device has the same type of screw heads.
We proposed a model, which is based on the Hough
transform and two DCNNs. Our proposal was the ex-
tension of the previous work we published, where the
scheme lets user to collect as much as data he/she
desires from a device. Given that the user creates
the ground truth classification (i.e., separates the col-
lected screw data into their respective type and size
categories), our model is able to hit very high F1 score
of 97%, whereas with Hough we found the optimal
parameters to hit 78% IoU for screw regions. The re-
sults had been quantified with hard drive devices of
different models and sizes, which have different sizes
and types of screws as documented by the experimen-
tal evaluation results of our scheme. Additionally,
we acquired screws from other devices and inserted
them into the scene to test the generalization ability
of the pipeline, achieving promising results as well.
The data set as well as the implementation are to be
published to facilitate further research
1
.
As future work, we note that Hough circle finder
can be employed in a better way. An alternative to
our current strategy with Hough circle finder would
be shifting of detected circle ROI to conduct dynamic
region correction in order to hit higher IoU. This is
due to the fact that candidates suggested by Hough
may be cut off in a way to mislead the classifier.
Note that all the misclassifications apart from the
intra-class ones (e.g., Torx6/Torx8) are empirically
found to be a direct result of how Hough cuts re-
gions. In some cases the artefacts are found as
Allen2.75, which, however, is a strongly valid clas-
sification and detection by the classifiers since the
candidate cropped by the Hough circle resembles an
Allen screw, and, thus the classifier claims so. The
suggested approach therefore could provide tangible
results by improving the cropping of candidates, how-
ever, it is a different research topic altogether, and,
mostly lies in the area of algorithm building.
1
https://drive.google.com/drive/folders/
1VFrF7B1FXPTgJRpu8rcnxJFRRKiT2ljY?usp=sharing
ROBOVIS 2020 - International Conference on Robotics, Computer Vision and Intelligent Systems
66

Figure 7: Classifications of detected screws during the dis-
assembly of a hard drive. All screw types are found cor-
rectly.
ACKNOWLEDGMENTS
The research leading to these results has received
funding from the European Union’s Horizon 2020
Research and Innovation programme (H2020-ICT-
2016-1, grant agreement number 731761, IMAGINE;
https://imagine-h2020.eu/). We would like to also ex-
press our gratitude to the disassembly plant we coop-
erated with, namely Electrocycling GmbH
2
, for their
continuous support throughout our investigation.
REFERENCES
Bdiwi, M., Rashid, A., and Putz, M. (2016). Au-
tonomous disassembly of electric vehicle motors
based on robot cognition. Proceedings - IEEE In-
ternational Conference on Robotics and Automation,
2016-June(July):2500–2505.
Bradski, G. and Kaehler, A. (2008). Learning OpenCV:
Computer vision with the OpenCV library. ” O’Reilly
Media, Inc.”.
B
¨
uker, U., Dr
¨
ue, S., G
¨
otze, N., Hartmann, G., Kalkreuter,
B., Stemmer, R., and Trapp, R. (2001). Vision-
based control of an autonomous disassembly station.
Robotics and Autonomous Systems, 35(3-4):179–189.
Buslaev, A., Iglovikov, V. I., Khvedchenya, E., Parinov, A.,
Druzhinin, M., and Kalinin, A. A. (2020). Albumen-
tations: fast and flexible image augmentations. Infor-
mation, 11(2):125.
Deng, J., Dong, W., Socher, R., Li, L.-J., Li, K., and Fei-
Fei, L. (2009). Imagenet: A large-scale hierarchical
image database. In 2009 IEEE conference on com-
puter vision and pattern recognition, pages 248–255.
Ieee.
Dr
¨
oder, K., Raatz, A., Herrmann, C., Wegener, K., and An-
drew, S. (2014). Disassembly of Electric Vehicle Bat-
teries Using the Example of the Audi Q5 Hybrid Sys-
tem. Procedia CIRP, 23:155–160.
Duda, R. O. and Hart, P. E. (1971). Use of the hough trans-
formation to detect lines and curves in pictures. Tech-
nical report, SRI INTERNATIONAL MENLO PARK
CA ARTIFICIAL INTELLIGENCE CENTER.
Elsayed, A., Kongar, E., Gupta, S. M., and Sobh, T. (2012).
A robotic-driven disassembly sequence generator for
end-of-life electronic products. Journal of Intelli-
gent and Robotic Systems: Theory and Applications,
68(1):43–52.
Everingham, M., Van Gool, L., Williams, C. K., Winn, J.,
and Zisserman, A. (2010). The pascal visual object
classes (voc) challenge. International journal of com-
puter vision, 88(2):303–338.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 770–778.
Huang, G., Liu, Z., Van Der Maaten, L., and Weinberger,
K. Q. (2017). Densely connected convolutional net-
works. In Proceedings of the IEEE conference on
computer vision and pattern recognition, pages 4700–
4708.
Jahanian, A., Le, Q. H., Youcef-Toumi, K., and Tset-
serukou, D. (2019). See the e-waste! training visual
intelligence to see dense circuit boards for recycling.
In Proceedings of the IEEE Conference on Computer
2
www.electrocycling.de
DCNN-based Screw Classification in Automated Disassembly Processes
67

Vision and Pattern Recognition Workshops, pages 0–
0.
Kahhat, R., Kim, J., Xu, M., Allenby, B., Williams, E., and
Zhang, P. (2008). Exploring e-waste management sys-
tems in the united states. Resources, conservation and
recycling, 52(7):955–964.
Kingma, D. and Ba, J. (2014). Adam: A method for
stochastic optimization. International Conference on
Learning Representations.
Pomares, J., Puente, S. T., Torres, F., Candelas, F. A.,
and Gil, P. (2004). Virtual disassembly of products
based on geometric models. Computers in Industry,
55(1):1–14.
Solomon, R., Sandborn, P. A., and Pecht, M. G. (2000).
Electronic part life cycle concepts and obsolescence
forecasting. IEEE Transactions on Components and
Packaging Technologies, 23(4):707–717.
Tan, M. and Le, Q. V. (2019). Efficientnet: Rethinking
model scaling for convolutional neural networks.
Ukida, H. (2007). Visual defect inspection of rotating screw
heads. In SICE Annual Conference 2007, pages 1478–
1483. IEEE.
Wegener, K., Chen, W. H., Dietrich, F., Dr
¨
oder, K., and
Kara, S. (2015). Robot assisted disassembly for the
recycling of electric vehicle batteries. Procedia CIRP,
29:716–721.
Weigl-Seitz, A., Hohm, K., Seitz, M., and Tolle, H. (2006).
On strategies and solutions for automated disassem-
bly of electronic devices. International Journal of Ad-
vanced Manufacturing Technology, 30(5-6):561–573.
Xie, Q., Luong, M.-T., Hovy, E., and Le, Q. V. (2019). Self-
training with noisy student improves imagenet classi-
fication.
Yildiz, E. and W
¨
org
¨
otter, F. (2019). Dcnn-based screw de-
tection for automated disassembly processes. In 2019
15th International Conference on Signal-Image Tech-
nology & Internet-Based Systems (SITIS), pages 187–
192. IEEE.
Zhang, Z. (2012). Microsoft kinect sensor and its effect.
IEEE multimedia, 19(2):4–10.
ROBOVIS 2020 - International Conference on Robotics, Computer Vision and Intelligent Systems
68
