
CogToM: A Cognitive Architecture Implementation
of the Theory of Mind
Fabio Grassiotto
a
and Paula Dorhofer Paro Costa
b
Dept. of Comp. Engineering and Industrial Automation (DCA), School of Electrical and Computer Engineering,
University of Campinas, Campinas, Brazil
Keywords:
Autism, Cognitive Architectures, Artificial Intelligence.
Abstract:
Mind-blindness, a typical trait of autism, is the inability of an individual to attribute mental states to others.
This cognitive divergence prevents the proper interpretation of the intentions and the beliefs of other individ-
uals in a given scenario, typically resulting in social interaction problems. In this work, we propose CogToM,
a novel cognitive architecture designed to process the output of computer systems and to reason according to
the Theory of Mind. In particular, we present a computational implementation for the psychological model of
the Theory of Mind proposed by Baron-Cohen and we explore the usefulness of the concepts of Affordances
and Intention Detection to augmenting the effectiveness of the proposed architecture. We verify the results by
evaluating both a canonical false-belief and a number of the Facebook bAbI dataset tasks.
1 INTRODUCTION
Autism Spectrum Disorder (ASD) (WHO, 1993) is
a biologically based neurodevelopmental disorder,
characterized by marked and sustained impairment in
social interaction, deviance in communication, and
restricted or stereotyped patterns of behaviors and in-
terests (Klin, 2006). ASD prevalence in Europe, Asia,
and the United States ranges from 1 in 40 to 1 in 500,
according to population and methodology used (Au-
gustyn, 2019).
Surveys on interactive technologies for autism
show that the research in the field has had a focus on
diagnosis, monitoring, assessment and intervention
tools, interactive or virtual environments, mobile and
wearable applications, educational devices, games,
and other therapeutic devices or systems (Boucenna
et al., 2014; Picard, 2009; Kientz et al., 2019; Jali-
aawala and Khan, 2020). However, we highlight the
lack of computational systems targeted towards indi-
viduals with autism with the express intent of assist-
ing them in real-time with their impairments in social
interactions.
Our understanding is that these systems should be
designed to analyze environmental and visual social
cues that are not readily interpreted by those indi-
a
https://orcid.org/0000-0003-1885-842X
b
https://orcid.org/0000-0002-1534-5744
viduals in the spectrum and provide expert advice on
the best alternative for interaction, improving the out-
comes of the social integration for these individuals.
However, the lack of systems like this can be partly
explained by the limitations of the state-of-the-art ma-
chine learning models, which are capable of translate
languages, recognize objects, and spoken speech, but
still struggles to extract the underlying logical, tem-
poral and causal structure from a massive amount of
training data. In this scenario, neurosymbolic artifi-
cial intelligence have emerged as an approach to the
problem. In CLEVRER, for example, the authors
propose a Neuro-Symbolic Dynamic Reasoning (NS-
DR) model that combines symbolic logic reasoning
and neural nets for pattern recognition (Yi* et al.,
2020).
In this work, we also explore the idea of a spe-
cialized visual recognition system that could be at-
tached to a reasoning system. In particular, we focus
on the modeling of a reasoning system that is inspired
by studies on autism, and we explore existing mecha-
nisms that the human mind uses for facilitating social
interaction.
There are several approaches for explaining the
deficits brought about by ASD, including environ-
mental, genetics and cognitive. In one of the cognitive
approaches, Simon Baron-Cohen proposed the mind-
blindness theory of autism (Baron-Cohen, 1997). His
work proposed the existence of the mindreading sys-
546
Grassiotto, F. and Costa, P.
CogToM: A Cognitive Architecture Implementation of the Theory of Mind.
DOI: 10.5220/0010194205460553
In Proceedings of the 13th International Conference on Agents and Artificial Intelligence (ICAART 2021) - Volume 2, pages 546-553
ISBN: 978-989-758-484-8
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

tem and established that the cognitive delays associ-
ated with autism are related to deficits in the develop-
ment of such a system.
The mindreading system is directly related to the
concept of Theory of Mind (ToM) as the innate ability
of attributing mental states to oneself and others and
to understand beliefs and desires that are distinct from
one’s own (Premack and Woodruff, 1978).
Later, research has shown that individuals with
ASD show deficits in ToM (Kimhi, 2014; Baraka
et al., 2019; Baron-Cohen, 2001). The deficits can
be demonstrated in a number of test tasks, in particu-
lar false-belief tasks, which are test tasks designed to
evaluate children capacity to understand other people
mental states (Baron-Cohen, 1990).
This work proposes and evaluates CogToM, a
novel cognitive architecture that models the Theory
of Mind, as hypothesized by Baron-Cohen, that pro-
cess inputs provided by an external specialized visual
recognition system. The paper is organized as fol-
lows. In Section 2, we review key concepts related to
cognitive architectures, false-belief tests and the key-
components of the Baron-Cohen mindreading model.
Following, in Section 2 we describe our proposal in
detail. In Section 6 we evaluate our model, using the
bAbI dataset. The paper is concluded in Section 7.
2 RELATED WORK
2.1 ToM in Cognitive Architectures
Not many cognitive architectures have supported
the implementation of the ToM ability up to this
point. Sigma has demonstrated an application for
simultaneous-move games. Polyscheme explored
perspective-taking for robots interaction with hu-
mans. ACT-R has built models of false-belief tasks
and later implemented them on a mobile robot.
Brian Scasselatti PhD thesis (Scassellati, 2001)
proposed a novel architecture called “Embodied The-
ory of Mind” in which he presented psychological
theories on the development of ToM in children, dis-
cussing the potential application of both in robotics
with the purpose of applying psychological models to
the detection of human faces and identifying agents.
Sigma, Polyscheme, ACT-R and others proposed
integrating principles of the ToM to enable specific
robotic behavior to simulate human-like capabilities
of social and robotic interaction. However, none of
them proposed an Observer-like implementation as
we seek here with the CogTom cognitive architecture
with the express intent of assistance.
Figure 1: The Sally-Anne test for false-belief. Adapted
from (Baron-Cohen et al., 1985), drawing by Alice Gras-
siotto.
2.2 Autism and False-Belief Tasks
False-Belief tasks are a type of task used in the study
of ToM to check if a child understands that another
person does not possess the same knowledge as her-
self. In (Baron-Cohen et al., 1985), Baron-Cohen
and Frith proposed the Sally-Anne test (Figure 1) as
a mechanism to infer the ability of autistic and non-
autistic children to attribute mental states to other peo-
ple regardless of the IQ level of the children being
tested.
The results presented on the article supported the
hypothesis that autistic children, in general, fail to
employ a ToM, due to the inability of representing
mental states. It is thought that this lack of predicting
ability causes deficits in the social skills for people in
the autism spectrum, making it much harder to face
the challenges of social interaction.
2.3 Mindreading
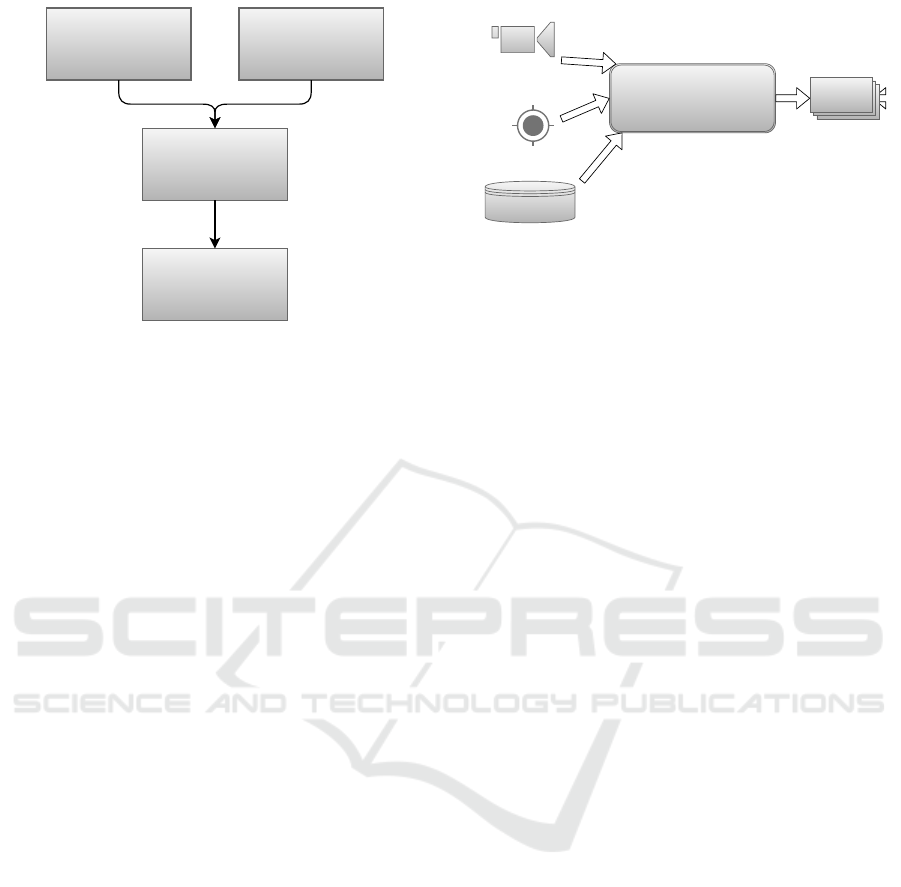
The mindreading model (Baron-Cohen, 1997) (Fig-
ure 2) seeks to understand the human mindreading
CogToM: A Cognitive Architecture Implementation of the Theory of Mind
547
Intentionality
Detector (ID)
Shared Attention
Mechanism (SAM)
Theory of Mind
Mechanism (ToMM)
Eye Direction
Detector (EDD)
Figure 2: The ToM Model.
process by proposing a set of four separate compo-
nents. Intentionality Detector (ID) is a perceptual
device that is able to interpret movement and identify
agents from objects and assign goals and desires. The
Eye Direction Detector (EDD) is a visual system
able to detect the presence of eyes or eye-like stim-
uli in others, to compute whether eyes are directed
to the self or towards something else and infer that
if the eyes are directed towards something, that the
agent to whom the eyes belong to is seeing that some-
thing. The Shared Attention Mechanism (SAM)
builds internal representations that specify relation-
ships between an agent, the self and a third object.
Finally, the Theory of Mind Mechanism (ToMM)
completes the agent development of mindreading by
representing the agent mental states.
3 AFFORDANCES
The concept of affordances has been extended as de-
scribed by (McClelland, 2017) including applications
for affordances in robotics (Montesano et al., 2008),
(S¸ahin et al., 2007) as a process to encode the rela-
tionships between actions, objects and effects.
For CogToM, the concept of affordances has
found use in the analysis of the environment to as-
sign properties to the objects and the environment it
is currently situated.
4 INTENTION DETECTION
Intention Understanding, a requirement for human-
machine interaction (Yu et al., 2015), allows for
robots to deduce the possible human intention by con-
sidering the relationship between objects and actions.
Processing Blocks
Visual
System
Affordances
Beliefs
CogToM Architecture
Positioning
Figure 3: CogToM Cognitive Architecture.
CogToM architecture proposes using external sys-
tems capable of understanding human intention to
augment the environmental analysis it requires.
5 CogToM PROPOSAL
The CogToM architecture (Figure 3) is designed as a
central processing unit to implement decision-making
functionality with the purpose of implementing an AI
Observer. This Observer has the purpose of passing
a false-belief task by implementing the mindreading
model and integrating it with the processing of affor-
dances and intentions. It relies on inputs as an ex-
ternal system, on the form of a visual camera system
capable of identifying agents and objects as well as
its locations, eye direction of the agents, and human
intention.
Affordances are provided to the system as a
database, or rather a dictionary of known properties
of the objects in the scene.
The outputs of the system (Beliefs) are textual rep-
resentations of the mental state of an agent as per-
ceived by the Observer.
For the purpose of simulating the external visual
and affordances system, the required set of inputs are
modeled through text files.
The system is simulated by processing a set of in-
puts that are tied to temporal steps. These temporal
steps are related to mind cycles and are defined as
“Mind Steps”.
As an example, we will present here the set of in-
puts the system would require for running two mind
steps in the Sally-Anne test on Table 1.
• Mind Step 1: Sally and Anne are in the room.
Basket, box and ball are on the floor.
• Mind Step 2: Sally reaches for the ball.
Input file entities.txt (Table 1a) simulate a camera in-
put identifying a scene. The camera system identifies
a list of entities in the scene and if the entity is an
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
548
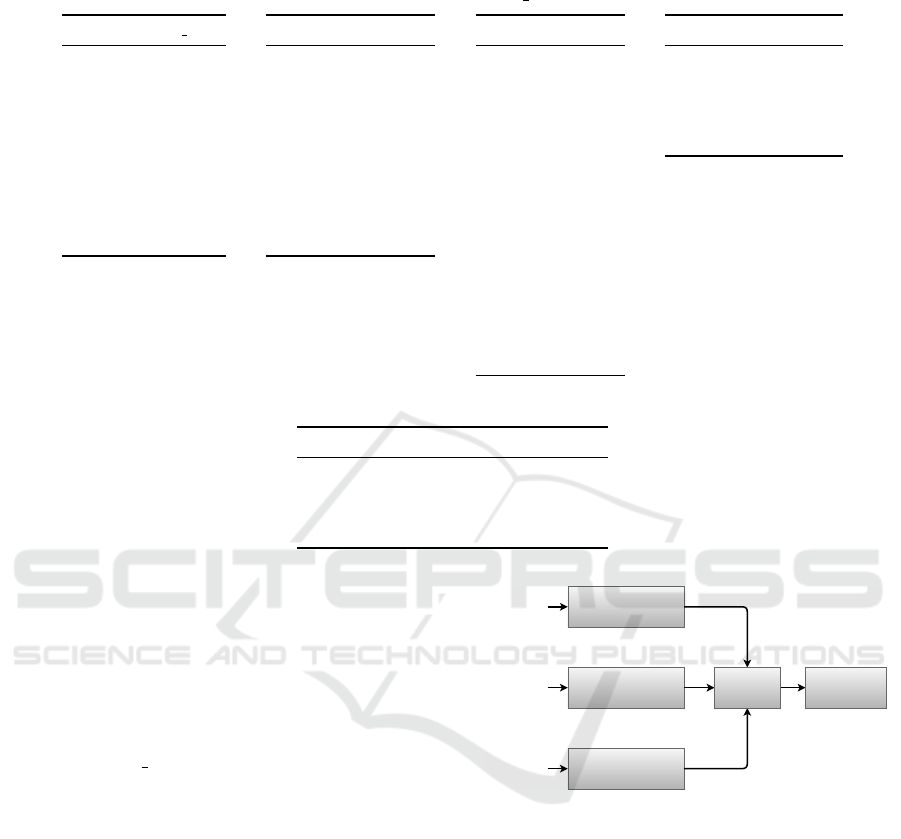
Table 1: Input tables for the canonical false-belief test.
(a) entities.txt
t Entity Is agent
1 Sally True
1 Anne True
1 Basket False
1 Box False
1 Ball False
2 Sally True
2 Anne True
2 Basket False
2 Box False
2 Ball False
(b) positioning.txt
t Entity Location
1 Sally Room
1 Anne Room
1 Basket Room
1 Box Room
1 Ball Room
2 Sally Room
2 Anne Room
2 Basket Room
2 Box Room
2 Ball Room
(c) eye directions.txt
t Agent Object
1 Sally Anne
1 Sally Basket
1 Sally Box
1 Sally Ball
1 Anne Sally
1 Anne Basket
1 Anne Box
1 Anne Ball
2 Sally Anne
2 Sally Basket
2 Sally Box
2 Sally Ball
2 Anne Sally
2 Anne Ball
2 Anne Basket
2 Anne Box
(d) affordances.txt
Object Affordance
Box Contains
Basket Contains
Ball Hides
Anne Exists
Sally Exists
(e) intentions.txt
t Agent Intention Object Target
1 Sally None None None
1 Anne None None None
2 Sally ReachFor Ball None
2 Anne None None None
agent. The column t specifies the mind step for the
camera information.
Input file positioning.txt (Table 1b) simulate a po-
sitioning system capable of identifying the location
of the agents and objects in the environment. The
column t specifies the mind step for the positioning
system information.
Input file eye directions.txt (Table 1c) simulates
a visual system capable of identifying eye direc-
tion. The information is provided as a triple <
t, Agent, Ob ject > where t is the simulation mind
step, agent is agent name and object is the entity the
agent is looking at.
Input file affordances.txt (Table 1d) presents “af-
fordances” for each of the entities in the scene. Affor-
dances are an entity’s properties that show the possi-
ble actions users can take with it. For example, a Box
may contain other objects, and a Ball may be hidden.
Affordances, for the purpose of this system, are im-
mutable properties during the simulation timeline.
Input file intentions.txt (Table 1e) simulates a
camera input identifying a scene, that could be
achieved with human intention understanding video
analysis. The camera system identifies the intention
of an agent based on movement and posture informa-
tion in the scene. The column t specifies the mind step
for the camera information.
Mindreading Model
Agents,
Objects,
Eye
Detection,
Shared
Attention
Affordance Handler
Intention Handler
Affordances
Intention
Detection
Memory SystemBeliefs
Figure 4: CogToM Processing Blocks.
CogToM Cognitive Architecture consists of four main
processing blocks (Figure 4), the Mindreading Model,
an Affordance Handler, an Intention Handler and a
Memory System. The processing blocks create inter-
nal representations of the input data (Table 2).
The Mindreading Model block implements the
four major modules (ID, EDD, SAM, ToMM) as de-
fined by Baron-Cohen (Baron-Cohen, 1997).
ID is responsible for identifying agents and ob-
jects in the scene and takes as input Table 1a data,
creating an internal representation as the agents Table
2a.
EDD takes as input Table 1b data and creates in-
ternal representations: an Entity Table for the agents
and objects, an Eye Direction Table that reports which
agents are seeing what objects (a value of 1 indicates
CogToM: A Cognitive Architecture Implementation of the Theory of Mind
549
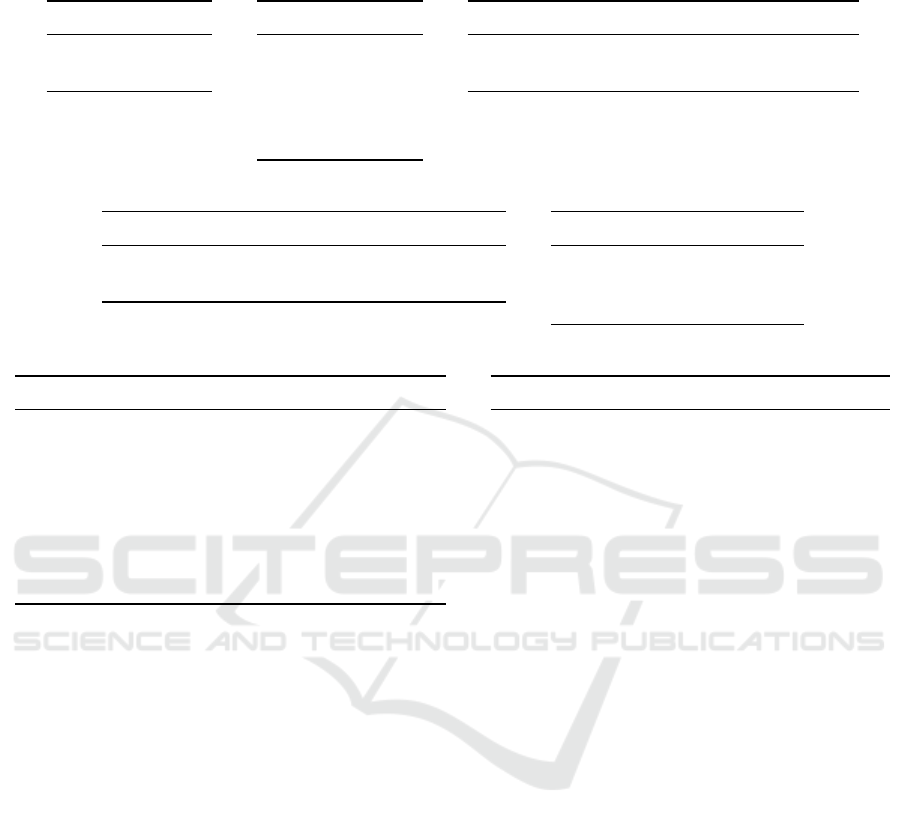
Table 2: Internal model tables for the canonical false-belief test.
(a) ID Agents Table
Agents
Sally
Anne
(b) EDD Entities Table
Entities
Sally
Anne
Basket
Box
Ball
(c) EDD Eye Direction Table
Sally Anne Basket Box Ball
Sally 0 1 1 1 1
Anne 1 0 1 1 1
(d) EDD Agent Registry
Agent Registry
Sally Anne Basket Box Ball
Anne Sally Basket Box Ball
(e) SAM Shared Attention Table
Object Agent 1 Agent 2
Basket Sally Anne
Box Sally Anne
Ball Sally Anne
(f) TOMM Beliefs Table
Agent Belief Object Affordance Target
Sally Believes Anne Exists None
Sally Believes Basket Contains None
Sally Believes Box Contains None
Sally Believes Ball Hides None
Anne Believes Sally Exists None
Anne Believes Basket Contains None
Anne Believes Box Contains None
Anne Believes Ball Hides None
(g) Observer Beliefs Table
Agent Belief Entity IS AT Target
Observer Knows Sally IS AT Room
Observer Knows Anne IS AT Room
Observer Knows Basket IS AT Room
Observer Knows Box IS AT Room
Observer Knows Ball IS AT Room
the object is in the visual field of the agent, 0 other-
wise), and an Agent Registry that based in the Eye
Direction Table creates a list of the objects in the vi-
sual field (tables 2b, 2c, 2d).
SAM creates three-way relationships between two
agents and one object (or another agent) to assign
a shared attention property to the agents (Table 2e).
SAM takes as input the internal processing results
from ID and EDD.
ToMM creates textual presentations in the form of
Beliefs as a result of the visual processing in the min-
dreading modules (Tables 2f and 2g). There are two
sets of beliefs the Observer generates: beliefs associ-
ated to each of agents in the scene and self-beliefs of
the Observer, such as the location of all entities in the
scene.
The Affordance Handler block is responsible for
processing object affordances and assigning proper-
ties to the objects in a scene from Table 1c data, mod-
ifying the set of beliefs in the ToMM module.
The Intention Handler block is responsible for
assigning outcomes for agent Intentions from Table
1d data and, based on the object affordances, also
modifying the set of beliefs in the ToMM module.
The Memory System block stores the results of
the simulation in the form of textual descriptions, as-
signing the Beliefs of each agent in each simulation
step.
CogToM provides a console system to control pro-
cessing of input for the duration of the simulation.
The console stops the simulation after each mind step
is processed and allows querying the mental states of
the Observer entity.
The mental states of the observer entity are re-
turned as Beliefs, text descriptions of the form:
< AGENT, BELIEV ES/KNOW S, OBJECT,
AFFORDANCE, TARGET OBJECT >
Where:
• AGENT: is the main agent that the mental state
applies to, for example Sally.
• BELIEVES/KNOWS: are the mental states as-
signed to the agent and to the observer. There are
various mental states that could be considered in-
cluding the states of pretending, thinking, know-
ing, believing, imagining, guessing and deceiving.
For the purposes of this system, only the Believe
and Know mental states are initially implemented.
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
550

• OBJECT: is the object of the belief, for example
Ball.
• AFFORDANCE: is the main property, or affor-
dance, of the object, for example a Box may Con-
tain something.
• TARGET OBJECT: is the target object for the
affordance, when applicable. For example, a Box
may contain a Ball.
The console system allows for queries on the mind
state of the Observer entity regarding the agents and
objects of the scene, providing output as the set of
beliefs:
Anne Believes Ball Hides
Anne Believes Basket Contains
Anne Believes Box Contains
Anne Believes Sally Exists
Observer Knows Anne IS AT Room
Observer Knows Ball IS AT Room
Observer Knows Basket IS AT Room
Observer Knows Box IS AT Room
Observer Knows Sally IS AT Room
6 RESULTS
6.1 The Sally-Anne Test
The canonical false-belief test is described by the se-
quence of steps:
Canonical False-Belief Test.
Sally and Anne are in the room. Basket, box
and ball are on the floor.
Sally reaches for the ball.
Sally puts the ball in the basket.
Sally exits the room.
Anne reaches for the basket.
Anne gets the ball from the basket.
Anne puts the ball in the box.
Anne exits the room, and Sally enters.
Sally searches for the ball in the room.
To assess CogToM’s ability in Sally-Anne test, we
simulated a visual system (Grassiotto and Costa,
2020) that would be capable of generating tables 1a,
1b and 1c (the tables show just the first two mind-
steps). Also we simulated a system that is capable of,
given an object, returning typical affordances of the
object, as in Table 1c.
CogToM is able to reply correctly to the belief
question as described in the Sally-Anne test as can
be seen in the console output below, providing the set
of beliefs:
Anne Believes Ball OnHand Of Anne
Anne Believes Basket OnHand Of Anne
Anne Believes Box Contains
Anne Believes Sally Exists
Sally Believes Anne Exists
Sally Believes Ball HiddenIn Basket
Sally Believes Basket Contains
Sally Believes Box Contains
This can be seen in the two mental models for Anne
and Sally:
Anne Believes Ball OnHand of Anne
Sally Believes Ball HiddenIn Basket
Since Sally was not present in the room while Anne
took the ball from the basket and hid it, she still be-
lieves the ball is in the basket. Therefore, the system
we designed is able to pass the false-belief task.
6.2 The bAbI Dataset
In order to measure the performance of the system
with tasks other than the canonical false-belief task,
other scenarios were considered for validation.
Facebook Research proposed The bAbI dataset in
(Weston et al., 2015) as a set of 20 simple toy tasks to
evaluate question answering and reading comprehen-
sion. Two tasks from this set were considered for the
validation of the proposed architecture.
Task 1: Single Supporting Fact.
Mary went to the bathroom.
John moved to the hallway.
Mary travelled to the office.
Where is Mary? A:office
Task 1: consists of a question to identify the location
of an agent, given one single supporting task (Mary
travelled to the office). Input tables for this first task
are at Table 3.
In order to handle positioning questions, the sys-
tem uses positioning data at Table 3b to reply cor-
rectly using the Observer beliefs for the location of
agents and objects in the environment.
CogToM was able to respond correctly the location of
the agents, by querying for the Observer beliefs:
Observer Knows John IS AT Hallway
Observer Knows Mary IS AT Office
Task 2: is an extension of task 1 to query the location
of an object that is on hand of an agent. The Observer
CogToM: A Cognitive Architecture Implementation of the Theory of Mind
551
Table 3: Input tables for Facebook bAbI Task 1.
(a) entities.txt
t Entity Is agent
1 Mary True
1 John True
2 Mary True
2 John True
(b) positioning.txt
t Entity Location
1 Mary Bathroom
1 John Hallway
2 Mary Office
2 John Hallway
(c) eye directions.txt
t Agent Object
1 Mary John
1 John Mary
2 Mary John
2 John Mary
(d) affordances.txt
Object Affordance
Mary Move
John Move
(e) intentions.txt
t Agent Intention Object Target
1 Mary Go Self Bathroom
1 John Go Self Hallway
2 Mary Go Self Office
2 John None Self None
Task 2: Two Supporting Facts.
John is in the playground.
John picked up the football.
Bob went to the kitchen.
Where is the football? A:playground
Table 4: Input tables for Facebook bAbI Task 2.
(a) positioning.txt
t Entity Location
1 John Playground
1 Bob Playground
1 Football Playground
2 John Playground
2 Bob Kitchen
2 Football Playground
beliefs support the positioning of agents and objects
as can be seen on Table 4. For brevity, only the posi-
tioning table is shown here.
The console output shows the Observer beliefs
with the location of the football.
John Believes Bob Exists
John Believes Football OnHand Of John
Bob Believes Football OnHand Of John
Bob Believes John Exists
Observer Knows Bob IS AT Kitchen
Observer Knows Football IS AT Playground
Observer Knows John IS AT Playground
7 CONCLUSION
CogToM was designed as a platform to validate the
viability for a computational system to pass false-
belief tasks based on implementing a psychological
model of the human mind. The system thus designed
has shown us the need for integrating further informa-
tion about the world in the form of affordances and
human intentions.
The cognitive architecture we proposed is capable
of passing the canonical false-belief task as defined
by researchers in the autism spectrum. The system
was designed in such a way to be generic enough to
allow for testing with simple tasks as described by the
Facebook bAbI dataset.
Even though the main motivation for the design of
CogToM was to explore the viability of designing an
assistant for people in the autism spectrum, our sys-
tem uses text processing at its core for the production
of beliefs. We see that it may find applications in the
domain of natural language processing research.
CogToM holds promise as a base system from
which future assistive systems for people in the
autism spectrum can be based on.
ACKNOWLEDGEMENTS
This study was financed in part by the Coordenac¸
˜
ao
de Aperfeic¸oamento de Pessoal de Nivel Superior -
Brasil (CAPES) - Finance Code 001.
REFERENCES
Augustyn, M. (2019). Autism spectrum disorder: terminol-
ogy, epidemiology, and pathogenesis.
Baraka, M., El-Dessouky, H. M., Abd El-Wahed, E. E.,
Amer, S. S. A., et al. (2019). Theory of mind: its
development and its relation to communication disor-
ders: a systematic review. Menoufia Medical Journal,
32(1):25.
Baron-Cohen, S. (1990). Autism: A specific cognitive dis-
order of “Mind-Blindness”. International Review of
Psychiatry, 2(1):81–90.
Baron-Cohen, S. (1997). Mindblindness: An essay on
autism and theory of mind. MIT press.
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
552

Baron-Cohen, S. (2001). Theory of mind in normal devel-
opment and autism. Prisme, 34(1):74–183.
Baron-Cohen, S., Leslie, A. M., Frith, U., et al. (1985).
Does the autistic child have a “theory of mind”. Cog-
nition, 21(1):37–46.
Boucenna, S., Narzisi, A., Tilmont, E., Muratori, F., Piog-
gia, G., Cohen, D., and Chetouani, M. (2014). In-
teractive technologies for autistic children: A review.
Cognitive Computation, 6(4):722–740.
Grassiotto, F. and Costa, P. (2020). CogtoM simulation re-
sults. Last checked on Sep 08, 2020.
Jaliaawala, M. S. and Khan, R. A. (2020). Can autism be
catered with artificial intelligence-assisted interven-
tion technology? a comprehensive survey. Artificial
Intelligence Review, 53(2):1039–1069.
Kientz, J. A., Hayes, G. R., Goodwin, M. S., Gelsomini, M.,
and Abowd, G. D. (2019). Interactive technologies
and autism. Synthesis Lectures on Assistive, Rehabil-
itative, and Health-Preserving Technologies, 9(1):i–
229.
Kimhi, Y. (2014). Theory of mind abilities and deficits in
autism spectrum disorders. Topics in Language Dis-
orders, 34(4):329–343.
Klin, A. (2006). Autism and asperger syndrome: an
overview. Brazilian Journal of Psychiatry, 28:s3–s11.
McClelland, T. (2017). Ai and affordances for mental ac-
tion. environment, 1:127.
Montesano, L., Lopes, M., Bernardino, A., and Santos-
Victor, J. (2008). Learning object affordances: from
sensory–motor coordination to imitation. IEEE Trans-
actions on Robotics, 24(1):15–26.
Picard, R. W. (2009). Future affective technology for autism
and emotion communication. Philosophical Trans-
actions of the Royal Society B: Biological Sciences,
364(1535):3575–3584.
Premack, D. and Woodruff, G. (1978). Does the chim-
panzee have a theory of mind? Behavioral and brain
sciences, 1(4):515–526.
S¸ahin, E., C¸ akmak, M., Do
˘
gar, M. R., U
˘
gur, E., and
¨
Uc¸oluk,
G. (2007). To afford or not to afford: A new formal-
ization of affordances toward affordance-based robot
control. Adaptive Behavior, 15(4):447–472.
Scassellati, B. M. (2001). Foundations for a Theory of Mind
for a Humanoid Robot. PhD thesis, Massachusetts
Institute of Technology.
Weston, J., Bordes, A., Chopra, S., Rush, A. M.,
van Merri
¨
enboer, B., Joulin, A., and Mikolov, T.
(2015). Towards ai-complete question answering:
A set of prerequisite toy tasks. arXiv preprint
arXiv:1502.05698.
WHO (1993). The ICD-10 classification of mental and be-
havioural disorders: diagnostic criteria for research,
volume 2. World Health Organization.
Yi*, K., Gan*, C., Li, Y., Kohli, P., Wu, J., Torralba, A., and
Tenenbaum, J. B. (2020). Clevrer: Collision events for
video representation and reasoning. In International
Conference on Learning Representations.
Yu, Z., Kim, S., Mallipeddi, R., and Lee, M. (2015). Hu-
man intention understanding based on object affor-
dance and action classification. In 2015 International
Joint Conference on Neural Networks (IJCNN), pages
1–6. IEEE.
CogToM: A Cognitive Architecture Implementation of the Theory of Mind
553
