
A Probabilistic Theory of Abductive Reasoning
Nicolas A. Espinosa Dice
1 a
, Megan L. Kaye
1 b
, Hana Ahmed
1,2 c
and George D. Monta
˜
nez
1 d
1
AMISTAD Lab, Department of Computer Science, Harvey Mudd College, Claremont, CA, U.S.A.
2
Scripps College, Claremont, CA, U.S.A.
Keywords:
Abductive Logic, Machine Learning, Creative Abduction, Creativity, Graphical Model, Bayesian Network,
Probabilistic Abduction.
Abstract:
We present an abductive search strategy that integrates creative abduction and probabilistic reasoning to pro-
duce plausible explanations for unexplained observations. Using a graphical model representation of abduc-
tive search, we introduce a heuristic approach to hypothesis generation, comparison, and selection. To identify
creative and plausible explanations, we propose 1) applying novel structural similarity metrics to a search for
simple explanations, and 2) optimizing for the probability of a hypothesis’ occurrence given known observa-
tions.
1 INTRODUCTION
Imagine that one morning you step outside to find that
the grass is wet, ruining your new shoes. Could rain
have caused the wet grass? However, you cannot re-
call whether yesterday was cloudy. How likely is it to
have rained last night if there were no clouds?
Now imagine an alternative scenario, in which you
are a medical student studying the causes and symp-
toms of tuberculosis. You learn that if a patient has
an abnormal x-ray, there are several possible factors,
including lung cancer and tuberculosis. How can you
determine which diagnosis to give in light of the x-
ray results? What relevant information is available to
help you decide a best explanation?
For a final example, imagine arriving at work to
find that information on your company’s database has
been corrupted. Your boss is responsible for fixing the
deficiency that allowed this data corruption to occur.
Overwhelmed by the vast number of possible expla-
nations for the data corruption, your boss tasks you,
a database engineer, with identifying plausible causes
of the issue.
These tasks require abductive inference: creating
and identifying hypotheses (causes) that are the most
a
https://orcid.org/0000-0001-7802-6196
b
https://orcid.org/0000-0001-5422-8244
c
https://orcid.org/0000-0003-4532-0334
d
https://orcid.org/0000-0002-1333-4611
promising explanations for the observed effects. You
can make use of background information, prior oc-
currences similar in nature to this one, where the ef-
fects and causes were successfully identified. How-
ever, you also acknowledge the possibility of unfa-
miliar causes, which are beyond the scope of prior
information and your current knowledge.
For example, in our database problem, corrupted
data is the unexplained observed effect. Your primary
task reflects that of abductive inference, which is a
strategy for discovering hypotheses that are worthy of
further investigation, which Schurz refers to as the
strategical function of abductive inference (Schurz,
2008). What constitutes further investigation de-
pends on the application of abductive inference; it
can be broadly defined as any work that provides
more information about the causes or effects. Addi-
tionally, the search space—the space of all available
hypotheses—can be significantly large, necessitating
an effective search strategy for finding promising hy-
potheses within reasonable time and computational
costs.
Despite significant advances in machine learning
research over the last three decades, traditional super-
vised learning models are ill-equipped to handle the
aforementioned example problems. Supervised learn-
ing models emulate inductive inference, in which hy-
potheses are causal rules that best fit the known data.
Unlike abduction, the primary function of inductive
inference is justificational, specifically the justifica-
562
Espinosa Dice, N., Kaye, M., Ahmed, H. and Montañez, G.
A Probabilistic Theory of Abductive Reasoning.
DOI: 10.5220/0010195405620571
In Proceedings of the 13th International Conference on Agents and Artificial Intelligence (ICAART 2021) - Volume 2, pages 562-571
ISBN: 978-989-758-484-8
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

tion of the conjectured conclusion. Induction serves
little strategical function because the range of possi-
ble conclusions is restricted by the methods of gener-
alizing prior observed cases.
In this paper, we present a novel abductive search
method capable of handling the examples previously
described. Our model first uses abductive search for
hypothesis identification. To limit redundancy in the
abductive search results, we introduce two distinct
similarity metrics that compare causal structures of
variables. Additionally, to account for possible un-
familiar causes, we implement hypothesis generation
in our model as a method of generating novel ex-
planations—hypothesized causes that are not neces-
sarily observed in the background information. Fi-
nally, while abductive “confirmation” does not in-
dicate whether an abduced hypothesis logically pre-
cedes the observed effects, our model utilizes a hy-
pothesis comparison method to compare hypotheses
based on the likelihood of the explanation.
Cox et al. used abduction with surface deduction
to generate novel hypotheses from Horn-clauses, and
suggested extending this method’s application to ab-
duction from directed graphs (Cox et al., 1992). Our
abductive search model relies on Reichenbach’s Com-
mon Cause Principle rather than surface deduction
for hypothesis generation, and uses edit-distance and
Jaccard-based reasoning to distinguish redundant hy-
potheses. This combination of creative and proba-
bilistic abduction with similarity-based reasoning for
abductive search is distinct from the approach of Cox
et al. (Cox et al., 1992). The use of Reichenbach’s
Common Cause Principle is inspired by Schurz’s
theory on common cause abduction (Schurz, 2008).
While Schurz seems to deny the potential usefulness
of integrating common cause and Bayesian reasoning,
we introduce a form of Bayesian confirmation that
provides probabilistic explanations for the hypotheses
discovered through common cause abduction. Like-
wise, while our abductive model checks consistency
and simplicity similarly to Reiter’s heuristic diagno-
sis model (Reiter, 1987), we rely on Bayesian condi-
tioning during hypothesis generation and comparison,
which strengthens the plausibility of our model’s con-
jectured hypotheses.
2 GRAPHICALLY MODELING
ABDUCTION
Graphical models are tools for integrating logical and
probabilistic reasoning in order to represent rational
processes and causal relationships. Developed by
Pearl, they comprehensively account for complexity
and uncertainty within a dataset (Pearl, 1998). A
probabilistic graphical model is composed of nodes
representing random variables, and edges connecting
the nodes to indicate conditional independence or de-
pendence.
An abductive search problem can be represented
in a directed acyclic graph (DAG), in which a di-
rected edge from one node (the “parent”) to another
(the “child”) represents a causal relationship between
them. For edges of a DAG that are weighted with the
conditional probability P(child | parent) of the child
variable given the parent, the weight speaks to the
causal relationship’s influential strength.
2.1 Bayesian Networks
We adapt the definition of Bayesian network from
(Feldbacher-Escamilla and Gebharter, 2019), and
make use of conventional notation: Sets of objects, in-
cluding sets of sets, are represented by boldfaced up-
percase letters (e.g., S). Variables are represented by
upper-case letters (e.g., X ), and their respective real-
izations are represented by corresponding lower-case
letters (e.g., x). Additionally, a directed edge between
two variables is represented by an arrow, →, where
the parent node is at the arrow’s tail and the child node
is at the tip (e.g., X
i
→ X
j
).
Following the definitions in (Feldbacher-
Escamilla and Gebharter, 2019), BhV
V
V ,E
E
E,Pi is a
Bayesian network such that V
V
V is a set of random
variables, E
E
E is a set of directed edges, and P is a
probability distribution over V
V
V .
For all X
i
∈ V
V
V , P
P
Pa
a
ar
r
r(X
i
) is the set of X
i
’s parents:
P
P
Pa
a
ar
r
r(X
i
) = {X
j
∈ V
V
V | X
j
→ X
i
}. (1)
The set of X
i
’s children is defined as
C
C
Ch
h
h(X
i
) = {X
j
∈ V
V
V | X
i
→ X
j
}. (2)
We define the set of X
i
’s descendants to be
D
D
De
e
es
s
s(X
i
) = {X
j
∈ V
V
V | X
i
→ ... → X
j
}, (3)
and the set of X
i
’s ancestors to be
A
A
An
n
nc
c
c(X
i
) = {X
j
∈ V
V
V | X
j
→ ... → X
i
}. (4)
Within the context of this paper, all variables in V
V
V
are discrete. To properly incorporate continuous vari-
ables into the model, the discretization approach pre-
sented in (Chen et al., 2017) can be used with a dis-
cretization runtime of O(r ·n
2
), where r is the number
of class variable instantiations. Furthermore, Freid-
man et al. present a method of discretizing continuous
variables while learning the structure of the Bayesian
network using background information, that is, data
denoting the values of previous instantiations of vari-
ables in V
V
V (Friedman et al., 1996).
A Probabilistic Theory of Abductive Reasoning
563

Additionally, we define a set of observed nodes
O
O
O = O
O
O
E
E
E
∪ O
O
O
O
O
O
, (5)
where
O
O
O
E
E
E
= {O
E
1
,...,O
E
l
} (6)
is the set of nodes representing observed effects that
require explanation. Subsequently,
O
O
O
O
O
O
= {O
O
1
,...,O
O
j
} (7)
is the set of nodes representing observations that do
not require explanations. Sets O
O
O
E
E
E
and O
O
O
O
O
O
are disjoint,
namely, O
O
O
E
E
E
∩ O
O
O
O
O
O
=
/
0. Furthermore, U
U
U is the set of
unobserved nodes, such that
U
U
U = V
V
V − O
O
O. (8)
A hypothesis H
H
H will take the form
H
H
H = {h
1
,...,h
m
}, (9)
where H
H
H ⊆ U
U
U. An explanation refers to hypotheses
that are causally related to a given set of observed ef-
fects.
2.1.1 Node Marginal Probability Distribution
We wish to calculate probabilities of n proposed
nodes v
i
∈ {v
1
,...,v
n
} given a set of known
nodes O
O
O = {x
1
,...,x
m
} and unknown nodes U
U
U =
{U
1
,...,U
`
}. Because there are unknown nodes—
random variables with unknown values—we need to
account for all potential outcomes. Thus, we calculate
the marginal probability distribution:
P(v
1
,...,v
n
| x
1
,...,x
m
)
=
P(v
1
,...,v
n
,x
1
,...,x
m
)
P(x
1
,...,x
m
)
(10)
To calculate the marginal probability distribution that
accounts for all potential outcomes of U
1
,...,U
`
, we
take a sum over all possible values. Thus, the numer-
ator of the full equation is:
P(v
1
,...,v
n
,x
1
,...,x
m
) =
∑
U
1
∈{u
1
,¬u
1
}
...
∑
U
`
∈{u
`
,¬u
`
}
P(v
1
,...,v
n
,x
1
,...,x
m
,U
1
,...,U
`
) (11)
To complete the equation, the denominator follows
the same computation.
3 ABDUCTION AS A SEARCH
STRATEGY
We will demonstrate how to use abductive reasoning
in a best-first search for explanations. Schurz defines
a best-first explanation within the search space of an
abductive model as one that meets the following cri-
teria (Schurz, 2008):
1. The hypothesis is the most justifiable out of all
candidate hypotheses.
2. The children/successors are the most plausible of
all the hypothesis’ successors.
We expand on Schurz’s definition by adding the fol-
lowing third criterion:
3. The hypothesis is a common cause or distant com-
mon cause (an ancestor node) of all given ob-
served effects.
Addition of this third criterion for potential hypothe-
ses is based on Reichenbach’s Common Cause Prin-
ciple (CCP). The CCP is cited by Schurz as the jus-
tification basis for creative abduction (Schurz, 2008),
and it is defined as follows:
Definition 3.1 (Reichenbach’s Common Cause Prin-
ciple). For two properties A and B that are 1) corre-
lated, and 2) unrelated by a conditional relationship,
there must exist some common cause C such that A
and B are both causal effects of C.
Our method relies on this principle during hypoth-
esis selection. Given observed effects, we target a
common cause (a hypothesis) that is the most promis-
ing explanation of the observed effects.
3.1 Problem Definition
Using abduction as a search strategy, we model a cre-
ative abductive solution for the following search prob-
lem adapted from (Feldbacher-Escamilla and Gebhar-
ter, 2019).
Given:
• A set of observed effects O
O
O
E
E
E
.
• A set of known or background data O
O
O
O
O
O
.
Find:
A solution with the following elements (Prendinger
and Ishizuka, 2005):
• A candidate hypothesis H
H
H
C
C
C
that is causally related
to all O
O
i
∈ O
O
O
O
O
O
and all O
E
i
∈ O
O
O
E
E
E
.
• A causal rule denoting that H
H
H
C
C
C
is a potential set
of causes for O
O
O
E
E
E
.
• The necessary condition that H
H
H
C
C
C
∩O
O
O is consistent
for all O
O
i
,O
E
i
∈ O
O
O.
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
564

4 HYPOTHESIS
IDENTIFICATION,
GENERATION, AND
COMPARISON
Due to the vast search space of possible causes, the
model’s first component, hypothesis identification,
must be completed using an abductive search strategy.
Hypothesis identification serves a strategical function
in the model by identifying possible common causes
of the observed effects. Treating possible causes as
hypotheses, we use the term abductive search because
we optimize our search for P(O
O
O
E
E
E
| H
H
H), the probabil-
ity of the observed effects occurring given the hy-
pothesis. P(O
O
O
E
E
E
| H
H
H) measures the fit of a hypoth-
esis, or the degree to which hypothesis H
H
H explains
observed effects O
O
O
E
E
E
. Abductive inference, by defini-
tion, is agnostic towards how probable a hypothesis
is, and instead optimizes for how well they explain
the observed effects. From a probabilistic reasoning
perspective, this is akin to optimizing for P(O
O
O
E
E
E
| H
H
H).
Thus, by optimizing our search for how well hypothe-
ses explain the observed effects, we are modeling
abduction. Additionally, optimizing the search for
P(O
O
O
E
E
E
| H
H
H) allows for the consideration of surprising
(unlikely) hypotheses that if true, sufficiently explain
the observed effects.
Having identified the set of possible common
causes, each cause is treated as a candidate hypoth-
esis and evaluated by a comparison function that opti-
mizes for P(H
H
H | O
O
O
E
E
E
), the probability that the hypoth-
esis is true given the observed effects occurring. By
Bayes’ Theorem, we see
P(H
H
H | O
O
O
E
E
E
) ∝ P(O
O
O
E
E
E
| H
H
H)P(H
H
H). (12)
Thus, by optimizing for P(H
H
H | O
O
O
E
E
E
), the probability
of the hypothesis is taken into account. Through hy-
pothesis comparison, our model incorporates a justifi-
cational function. The best performing candidate hy-
potheses are added to the set of promising hypotheses,
denoted H
H
H
P
P
P
.
4.1 Hypothesis Identification and
Abductive Search for Possible
Common Causes
This section discusses the search for possible com-
mon causes of a set of observed effects. For clarity,
in probability functions, we treat possible common
causes as possible hypotheses.
The abductive search attempts to model the fol-
lowing
argmax
H
H
H⊆U
U
U
P(O
O
O
E
E
E
| H
H
H), (13)
in cases where O
O
O
E
E
E
is given. Because edges in
a Bayesian network are weighted with conditional
probabilities, the hypotheses that optimize P(O
O
O
E
E
E
| H
H
H)
will generally be connected to more of the observed
effects by an edge or directed path. So, rather than
computing P(O
O
O
E
E
E
| H
H
H) for all of the possible hypothe-
ses, we can instead search for possible hypotheses that
maximize the number of observed effects to which
they are connected.
To begin the search for such possible hypothe-
ses, we can apply CCP to the observed effects if and
only if all variables O
E
i
∈ O
O
O
E
E
E
satisfy the conditions
of CCP. Specifically, for all O
E
i
,O
E
j
∈ O
O
O
E
E
E
such that
O
E
i
6= O
E
j
, O
E
i
and O
E
j
must be correlated and unre-
lated by a conditional relationship. For now, we as-
sume that O
O
O
E
E
E
satisfies the criteria for CCP, and we
will later demonstrate how to handle the two possible
cases in which CCP criteria are not satisfied.
By CCP, there exists some common cause C
such that O
E
i
and O
E
j
are both effects of C, for all
O
E
i
,O
E
j
∈ O
O
O
E
E
E
where O
E
i
6= O
E
j
. This means there
exists some directed path from C to O
i
and O
j
.
Definition 4.1 (Directed Path). A directed path from
X
i
to X
j
, where X
i
,X
j
∈ V
V
V , is a set of edges E
E
E
X
i
,X
j
such that either (X
i
,X
α
1
),...,(X
α
k
,X
j
) ∈ E
E
E
X
i
,X
j
where
α
1
,...,α
k
represent arbitrary node indices of the
graph for some k ∈ N, or (X
i
,X
j
) ∈ E
E
E
X
i
,X
j
.
Therefore, the set of common causes of the ob-
served effects, C
C
C(O
O
O
E
E
E
), must be a subset of the set of
variables with a directed path to O
O
O
E
E
E
.
Definition 4.2 (Singleton Complete Explanations).
A singleton complete explanation is a variable in
A
A
An
n
nc
c
c(O
O
O
E
E
E
) with a directed path to every variable in O
O
O
E
E
E
.
The set of singleton complete explanations is given by
C
C
C
P
P
P
(O
O
O
E
E
E
) :=
\
O
E
i
∈O
O
O
E
E
E
A
A
An
n
nc
c
c(O
E
i
). (14)
We refer to the singleton explanations in C
C
C
P
P
P
(O
O
O
E
E
E
) as
possible common causes because P(O
O
O
E
E
E
| H
H
H)—where
H
H
H is the cause—has not yet been computed. Calcu-
lating this marginal probability is the only method of
verifying a variable or set of variables as an actual
common cause. Each possible cause in this set is con-
sidered a complete explanation because there exists a
directed path from the nodes composing the explana-
tion to each observed effect.
However, we must also consider cases where O
O
O
E
E
E
does not satisfy the CCP criteria. Specifically, there
are two possible cases in which the CCP criteria is
not satisfied by O
O
O
E
E
E
.
Case 1. Suppose that there exists some distinct pairs
of variables O
E
i
,O
E
j
∈ O
O
O
E
E
E
such that O
E
i
and O
E
j
are
A Probabilistic Theory of Abductive Reasoning
565

conditionally related. In such a case, there must be
a directed path between O
E
i
and O
E
j
. Consequently,
since the Bayesian network is acyclic, then without
a loss of generality, O
E
i
∈ D
D
De
e
es
s
s(O
E
j
). Therefore, it
is possible that O
E
j
explains O
E
i
, meaning that O
E
j
causes O
E
i
. So, O
E
i
can be removed from O
O
O
E
E
E
and
added to O
O
O
O
O
O
. Thus, we would maintain the condition
that all pairs of distinct variables in O
O
O
E
E
E
are unrelated
by an edge or directed path. However, if we are not
certain that O
E
j
explains O
E
i
, then we can leave O
E
i
,
O
E
j
in O
O
O
E
E
E
.
Case 2. Suppose there exists some distinct pairs of
variables O
E
i
,O
E
j
∈ O
O
O
E
E
E
such that O
E
i
and O
E
j
are
uncorrelated. In this case, because O
E
i
and O
E
j
are
observed effects, it may be impossible to find a single
common cause explaining both nodes. Therefore, we
must consider cases where the best explanation is a
hypothesis containing multiple variables.
There may exist three distinct types of possible
common causes:
1. Multivariate subsets of A
A
An
n
nc
c
c(O
O
O
E
E
E
) that are com-
plete explanations.
2. Multivariate subsets of A
A
An
n
nc
c
c(O
O
O
E
E
E
) that are partial
explanations.
3. Multivariate subsets of A
A
An
n
nc
c
c(O
O
O
E
E
E
) that are novel
explanations.
Note that the possible common causes are now multi-
variate sets rather than singleton sets.
When the CCP criteria is not satisfied, there may
not exist a single common cause of all the observed
effects. In such cases, we must instead consider ex-
planations that incorporate multiple variables.
Definition 4.3 (Multivariate Complete Explanations).
A multivariate complete explanation consists of mul-
tiple nodes whose joint set of descendants contains
the set of observed effects as a subset. The set of mul-
tivariate complete explanations is given by
{S
S
S ⊆ A
A
An
n
nc
c
c(O
O
O
E
E
E
) | O
O
O
E
E
E
⊆ D
D
De
e
es
s
s(S
S
S)}. (15)
We must also consider the existence of an observed
effect whose explanation is beyond the scope of the
model. This could occur when O
O
O
E
E
E
contains noisy ob-
served effects that cannot be sufficiently explained by
the model.
A simple example of noisy observed effects in
Bayesian networks are root nodes: nodes with empty
ancestor sets. Since the ancestor sets of root nodes
are empty, there cannot exist any causes or hypothe-
ses that explain the root nodes. In such cases, the root
nodes in O
O
O
E
E
E
given by
O
O
O
R
R
R
= {O
E
i
∈ O
O
O
E
E
E
| P
P
Pa
a
ar
r
r(O
E
i
) =
/
0}, (16)
would be removed from O
O
O
E
E
E
and added to O
O
O
O
O
O
.
If a noisy observation is not a root node, it remains
in O
O
O
E
E
E
. To handle such cases, we include possible
causes that do not have a directed path from the pos-
sible cause to every observed effect.
Definition 4.4 (Multivariate Partial Explanations). A
partial explanation consists of multiple nodes whose
joint set of descendants contains a subset of O
O
O
E
. The
set of partial explanations is given by
{S
S
S ⊆ A
A
An
n
nc
c
c(O
O
O
E
) | ∃O
E
i
∈ O
O
O
E
E
E
,O
E
i
∈ D
D
De
e
es
s
s(S
S
S)}. (17)
Lastly, we account for observed effects that de-
scend from unfamiliar causes: causes of a given set of
observed effects that were not observed in the back-
ground information. In these cases, we develop a hy-
pothesis generation method to generate novel expla-
nations of the unique causes.
Definition 4.5 (Novel Explanations). A novel expla-
nation is an explanation found through hypothesis
generation.
Hypothesis generation refers to the introduction of
new edges in the Bayesian network for the purpose of
creating common causes of the observed effects. Gen-
erating an edge between two nodes entails the devel-
opment of a causal relationship between them. The
set of generated edges E
E
E
H
H
H
G
G
G
of a hypothesis H
H
H will
take the form
E
E
E
H
H
H
G
G
G
:= {(h
α
1
,h
β
1
),...,(h
α
g
,h
β
g
)}. (18)
However, the model is faced with a vast search
space of nodes to generate new edges between, neces-
sitating incorporation of bias in the search. Specif-
ically, in searching for a set of unobserved nodes to
generate edges between, we optimize for the number
of observed effects that are descendants of the given
set of unobserved nodes.
4.1.1 Implementation
Because there is uncertainty as to whether O
O
O
E
E
E
satis-
fies the CCP criteria, we must include multivariate
complete explanations, multivariate partial explana-
tions, and novel explanations in the set of possible
common causes.
Algorithm 1 identifies the sets of singleton com-
plete explanations, multivariate complete explana-
tions, and multivariate partial explanations, and it re-
turns their union, defined as C
C
C
P
P
P
(O
O
O
E
E
E
)
+
. Algorithm 2
then uses C
C
C
P
P
P
(O
O
O
E
E
E
)
+
to generate novel explanations,
where C
C
C
P
P
P
G
G
G
(O
O
O
E
E
E
) is the set of novel explanations.
Algorithm 1 is motivated by the Apriori algo-
rithm (Agrawal and Srikant, 1994) for inferring causal
relations between sales items from large transaction
datasets. The Apriori algorithm relies on the apriori
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
566

property, a relational invariant between sets and sub-
sets, in order to improve efficiency. We leverage a
similar property in the following algorithm.
Algorithm 1: Computing Partial and Complete
Explanations, C
C
C
P
P
P
(O
O
O
E
E
E
)
+
.
Set C
C
C
P
P
P
(O
O
O
E
E
E
)
+
=
/
0;
Set R
R
R
Prev
= A
A
An
n
nc
c
c(O
O
O
E
E
E
);
Set R
R
R
Curr
=
/
0;
for k = k
T
,k
T
− 1,k
T
− 2,. . . , 1 do
if R
R
R
Prev
is empty then
Return C
C
C
P
P
P
(O
O
O
E
E
E
)
+
;
end
for S
S
S ⊆ R
R
R
Prev
such that |S
S
S| = k and
sim(R
R
R
Curr
,S
S
S) < S
T
do
if
|O
O
O
E
E
E
∩D
D
De
e
es
s
s(S
S
S)|
|O
O
O
E
E
E
|
≥ P
T
then
Set C
C
C
P
P
P
(O
O
O
E
E
E
)
+
= C
C
C
P
P
P
(O
O
O
E
E
E
)
+
∪ {S
S
S};
Set R
R
R
Curr
= R
R
R
Curr
∪ S
S
S;
end
end
Set R
R
R
Prev
= R
R
R
Curr
;
Set R
R
R
Curr
=
/
0;
end
Return C
C
C
P
P
P
(O
O
O
E
E
E
)
+
;
Let k represent the size of the candidate possible hy-
potheses set and k
T
be a hyperparameter specifying
the maximum size k to be considered. The set R
R
R
Curr
keeps track of variables for which the algorithm will
compute smaller subsets. Whether a set of variables
is added to R
R
R
Curr
is determined by measuring the sim-
ilarity of R
R
R
Curr
to the new set. If the new set is above
a certain threshold, specified by hyperparameter S
T
,
then the new set does not substantially add to the ex-
isting connection between the nodes in R
R
R
Curr
and the
observed effects, nor does the new set significantly in-
crease the ability of R
R
R
Curr
to explain the observed ef-
fects. In such a case, we ignore that set. Finally, P
T
is
a hyperparameter that specifies the percentage of the
observed effects that must be connected to a possible
hypothesis.
Next, we use C
C
C
P
P
P
(O
O
O
E
E
E
)
+
to compute novel expla-
nations. Specifically, Algorithm 2 computes N
N
N(O
O
O
E
E
E
),
a set of tuples that associates hypotheses with their
corresponding generated edges. More precisely, for
the members of N
N
N(O
O
O
E
E
E
), the first element in each tu-
ple is a hypothesis and the second element in the tu-
ple is the hypothesis’ corresponding set of generated
edges, E
E
E
H
H
H
G
G
G
. Consequently, the set of novel explana-
tions, C
C
C
P
P
P
G
G
G
(O
O
O
E
E
E
), is the set of the first elements in the
tuples in N
N
N(O
O
O
E
E
E
). Additionally, note that C
C
C
P
P
P
(O
O
O
E
E
E
)
+
=
C
C
C
P
P
P
G
G
G
(O
O
O
E
E
E
), but each hypothesis in C
C
C
P
P
P
G
G
G
(O
O
O
E
E
E
) contains a
corresponding set of generated edges that defines new
edges between nodes, resulting in a new explanation.
As a technical note, the implementation of Algorithm
2 only iterates over partial explanations in C
C
C
P
P
P
(O
O
O
E
E
E
)
+
,
since complete explanations contain nodes that are al-
ready connected to all observed effects.
Algorithm 2: Computing Novel Explanations.
Set N
N
N(O
O
O
E
E
E
) =
/
0;
for H
H
H ∈ C
C
C
P
P
P
(O
O
O
E
E
E
)
+
do
Set O
O
O
Exc
= O
O
O
E
E
E
− (O
O
O
E
E
E
∩ D
D
De
e
es
s
s(H
H
H));
Set E
E
E
H
H
H
G
G
G
=
/
0;
for O
i
∈ O
O
O
Exc
do
Set H
Max
= argmax
H
i
∈H
H
H
sim(O
i
,H
i
);
Set E
E
E
H
H
H
G
G
G
= E
E
E
H
H
H
G
G
G
∪ {(H
Max
,O
i
)};
end
Set N
N
N(O
O
O
E
E
E
) = N
N
N(O
O
O
E
E
E
) ∪ {(H
H
H, E
E
E
H
H
H
G
G
G
)};
end
Return N
N
N(O
O
O
E
E
E
);
4.2 Hypothesis Comparison
Once we have identified the set of potential com-
mon causes C
C
C
P
P
P
(O
O
O
E
E
E
)
+
, we refine it by optimizing for
P(H
H
H | O
O
O), the likelihood of a hypothesis, which serves
a justificational function in the model.
It is important to note that P(O
O
O | H
H
H) is not a ver-
ification measure of the hypothesis’ occurrence in a
given situation, but it is rather a justificational com-
ponent for the model’s output set C
C
C
P
P
P
(O
O
O
E
E
E
)
+
. Each
H
H
H ∈ C
C
C
P
P
P
(O
O
O
E
E
E
)
+
is theoretical and therefore unverifi-
able by an abductive model, but we can estimate a
hypothesis’ promise given the observed facts with the
measure P(O
O
O | H
H
H).
4.2.1 Comparing Identified and Generated
Hypotheses
In order to compare selected and generated hypothe-
ses, we defined a cost function that optimizes for
P(H
H
H | O
O
O), while creating a negative “cost” for gen-
erated edges.
The comparison function is
F(H
H
H, E
E
E
H
H
H
G
G
G
,O
O
O) := P(H
H
H | O
O
O) − αc(E
E
E
H
H
H
G
G
G
), (19)
where c(E
E
E
H
H
H
G
G
G
) is the cost of generating edges, defined
below, α is a weighting hyperparameter, and E
E
E
H
H
H
G
G
G
is
the set of generated edges of hypothesis H
H
H. The cost
of generating edges is defined by
c(E
E
E
H
H
H
G
G
G
) :=
∑
(X
i
,X
j
)∈E
E
E
H
H
H
G
G
G
(1 − sim(X
i
,X
j
)), (20)
where sim(X
i
,X
j
) is the similarity of X
i
compared to
X
j
, according to the similarity metrics defined in Sec-
A Probabilistic Theory of Abductive Reasoning
567

tion 5. Note that for each hypothesis under consid-
eration, the probability distribution for the particular
hypothesis is updated such that for all (O
i
,H
i
) ∈ E
E
E
H
H
H
G
G
G
,
P(O
i
| H
i
) = 1.
For all candidate hypotheses H
H
H ∈ C
C
C
P
P
P
(O
O
O
E
E
E
)
+
,
F(H
H
H, E
E
E
H
H
H
G
G
G
,O
O
O) is computed, and the hypotheses with
the highest P
Z
percent of scores are added to the set
of promising hypotheses, H
H
H
P
P
P
, where P
Z
is a hyperpa-
rameter used to control the selectivity of the process.
5 SIMILARITY METRICS
In hypothesis comparison, we incorporate bias to-
wards simple explanations. Simplicity in the graph-
ical model is indicated by structural dissimilarity,
as similar hypotheses can be deemed redundant. To
gauge structural similarity between hypotheses, we
introduce two metrics that determine node similarity:
1) graph edit distance, on the basis of edge weight,
and 2) the Jaccard Index of Variables, on the basis
of common descendants. In the search for plausible
explanations within a probabilistic Bayesian network,
disfavoring similarity reduces redundancy among hy-
potheses and produces simpler explanations. Intu-
itively, this bias reflects an innate understanding that
objects with similar properties and behaviors produce
similar outcomes, and vice versa.
5.1 Similarity Metric: Jaccard Index of
Variables
The Jaccard Index is defined as:
J(A,B) :=
|A ∩ B|
|A ∪ B|
, (21)
where A and B are sets.
The model uses what we define as the Jaccard In-
dex of Variables, a Jaccard Index-inspired metric of
similarity between variables in V
V
V . But rather than re-
lying solely on set cardinalities, we use the probabil-
ity distribution P. Thus, we adapt the Jaccard Index
to compute similarity between two variables A and B
in the Bayesian network based on their children. The
children of A and B are denoted as C
C
Ch
h
h(A) = A
A
A
C
C
C
and
C
C
Ch
h
h(B) = B
B
B
C
C
C
. The Jaccard Index of Variables is de-
fined as
sim
Jaccard
(A,B) :=
(C
C
Ch
h
h(A) ∩C
C
Ch
h
h(B))
(C
C
Ch
h
h(A) ∪C
C
Ch
h
h(B))
, (22)
=
(A
A
A
C
C
C
∩ B
B
B
C
C
C
)
(A
A
A
C
C
C
∪ B
B
B
C
C
C
)
, (23)
where
(A
A
A
C
C
C
∪ B
B
B
C
C
C
) := |A
A
A
C
C
C
− B
B
B
C
C
C
| + (A
A
A
C
C
C
) + (B
B
B
C
C
C
)
− (A
A
A
C
C
C
∩ B
B
B
C
C
C
), (24)
(A
A
A
C
C
C
∩ B
B
B
C
C
C
) :=
∑
C∈A
A
A
C
C
C
∩B
B
B
C
C
C
min(P(C|A),P(C|B)) (25)
and
(A
A
A
C
C
C
) :=
∑
C∈A
A
A
C
C
C
∩B
B
B
C
C
C
P(C | A), (26)
(B
B
B
C
C
C
) :=
∑
C∈A
A
A
C
C
C
∩B
B
B
C
C
C
P(C | B). (27)
5.2 Similarity Metric: Edit-distance
We refer to edit-distance (Bunke, 1997) as the cost of
operations required to transform one graphical struc-
ture into another. Edit-distance is the basis of our edit-
distance based similarity metric, which is defined as
sim
Edit
(A,B) :=
c(A,B)
|C
C
Ch
h
h(A)|
(28)
=
c(A,B)
|A
A
A
C
C
C
|
, (29)
where c(A,B) is a cost function to measure the cost of
graph changing operations such that
c(A,B) :=
∑
C∈A
A
A
C
C
C
∩B
B
B
C
C
C
kP(C | A)−P(C | B)k+|A
A
A
C
C
C
−B
B
B
C
C
C
|,
(30)
where kP(C | A) − P(C | B)k is the absolute value of
the difference P(C | A) − P(C | B).
5.3 Similarity of Sets of Variables
In addition to computing the similarity of variables,
we can compute the similarity of sets of variables.
Specifically, for some similarity metric sim(·,·), we
can compute
sim(A
A
A,B
B
B) :=
∑
X
i
∈A
A
A
sim(X
i
,X
∗
j
)
|A
A
A|
(31)
where X
∗
j
:= argmax
X
j
∈B
B
B
sim(X
i
,X
j
). The algorithm
for computing the similarity of sets of variables is
given below in Algorithm 3.
6 APPLICATIONS
6.1 Database Corruption
Using the hypothesis identification, generation, and
comparison methods previously described, we can
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
568
Algorithm 3: Computing Similarity of Sets of
Variables, sim(A
A
A,B
B
B).
Set total = 0;
for X
i
∈ A
A
A do
Set X
∗
j
= argmax
X
j
∈B
B
B
sim(X
i
,X
∗
j
);
Set total = total + sim(X
i
,X
∗
j
);
end
Set sim(A
A
A,B
B
B) = total/|A
A
A|;
Return sim(A
A
A,B
B
B);
demonstrate hypothesis selection within the example
of a corrupted database, which we discussed in Sec-
tion 1.
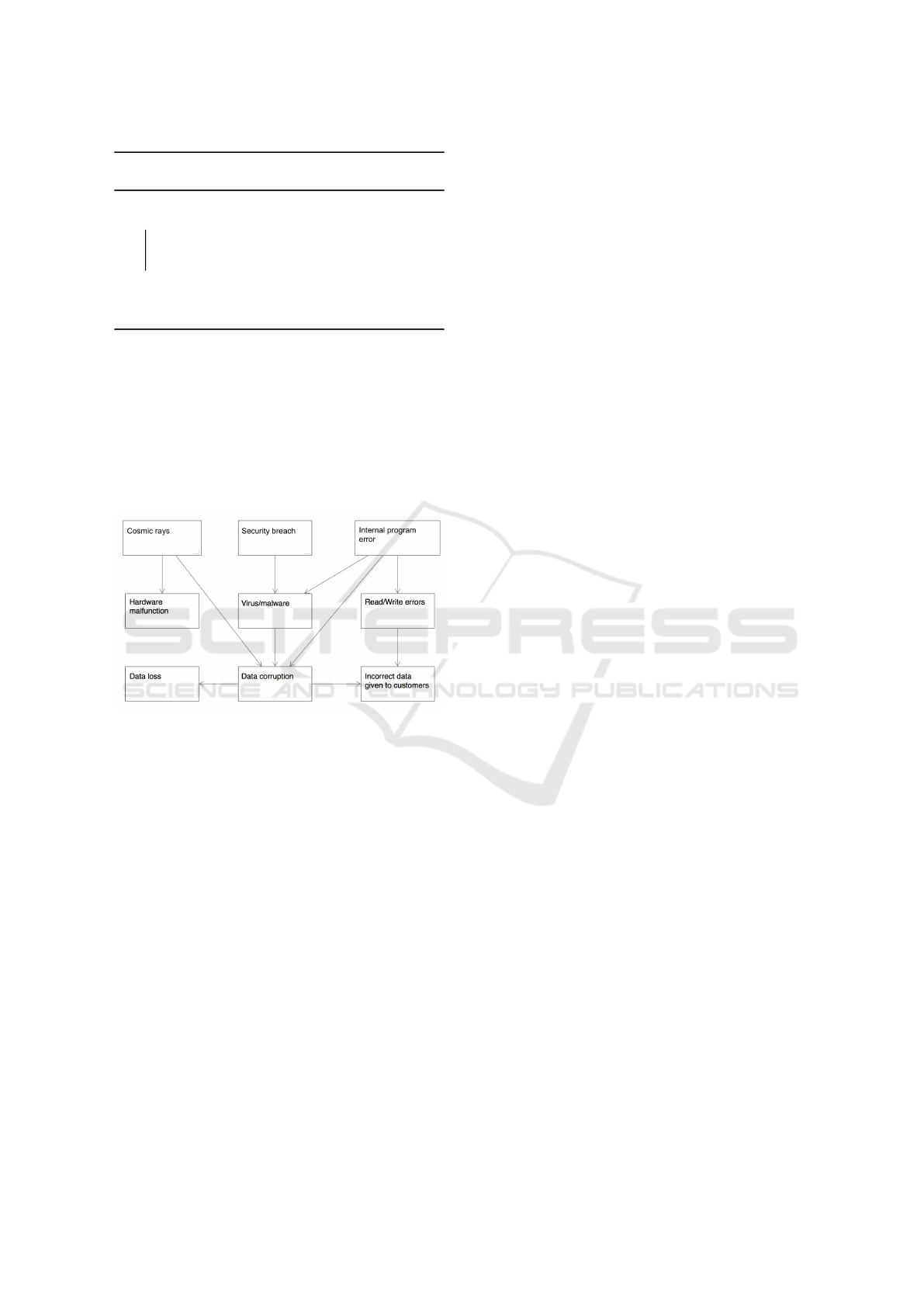
First, we will construct a graphical model to repre-
sent the situation. Figure 1 gives a hypothetical graph-
ical representation of the corrupted database example
to illustrate our process, with nodes that are related by
an arbitrary conditional probability table.
Figure 1: Data Corruption Example DAG.
After inputting background information and observed
effects/surprising phenomena to the current model,
we can identify every potential hypothesis—both
probable and improbable. For example, we could
have observed Hardware Malfunction in conjunction
with Data Corruption.
Some of these hypotheses could be overly-
complicated and redundant. For example, a possi-
ble explanation could be the simultaneous occurrence
of an Internal Program Error and a Virus/Malware.
Another possible explanation could that only a
Virus/Malware caused Data Corruption. These two
hypotheses share common components and effects,
but we can reduce the complexity of our hypothesis
by simply selecting Virus/Malware. In these cases of
redundant hypotheses, our model utilizes the similar-
ity metrics to identify the simple hypothesis.
Our first step, which we refer to as observation-
testing, is calculating P(O
O
O | H
H
H
i
i
i
) for some hypothesis
H
H
H
i
i
i
. Given a potential hypothesis, we will calculate
the probabilities of the observed effects. However,
due to the graph structure, we need to calculate the
marginal probability, which takes into account all rel-
evant nodes, regardless of whether they are in our hy-
pothesis set or not. We will then choose the top n%
of these hypotheses to move on to the second phase.
Having found hypotheses that best explain the ob-
served effects, the second step is hypothesis refine-
ment: calculating P(H
H
H
i
i
i
| O
O
O) for some hypothesis H
H
H
i
i
i
.
Given the set of hypotheses from observation-testing,
we will then identify and choose the hypothesis that is
most probable given our background information. As
a result of this step, we are given the most probable
hypothesis that also adequately explains our observed
effects.
Suppose that our first step selected two potential
hypotheses to move forward into stage two: Cos-
mic Rays, which yielded a probability of .93, and
Virus/Malware, which yielded a probability of .71.
However, during phase two, suppose Virus/Malware
yielded a probability of .67, while Cosmic Rays
yielded a probability of .002. Virus/Malware would
have a higher final probability and would therefore be
chosen as our final hypothesis.
We continue the data corruption example to
demonstrate hypothesis generation. Consider a new
situation where we are given Internal Program Error
and Security Breach as potential explanations for the
observed occurrences of both Hardware Malfunction
and Read/Write Errors. Note that while Internal Pro-
gram Error is a parent node to Read/Write Errors, it
is not an ancestor for Hardware Malfunction. Also,
Security Breach is not an ancestor for Hardware Mal-
function nor Read/Write Errors. This means that we
have no common cause hypothesis for the observed
effects. In this case, the model will generate a com-
mon cause hypothesis using the edge generation pro-
cess described in Section 4.1.
An edge will be introduced to connect a hypothe-
sis node with a new child node that is also an observed
effect. In the current example, neither of our potential
hypotheses would cause a Hardware Malfunction, yet
a Hardware Malfunction has been observed. So, two
edges are generated: one connecting Security Breach
to Hardware Malfunction, and one connecting Inter-
nal Program Error to Hardware Malfunction. Security
Breach and Internal Program are now novel common
cause hypotheses, and will be reevaluated using the
observation-testing and hypothesis refinement meth-
ods previously described.
6.2 The Wet Grass Network
As an additional example, let us consider the Wet
Grass Bayesian network (Bayes Server, 2020), shown
A Probabilistic Theory of Abductive Reasoning
569
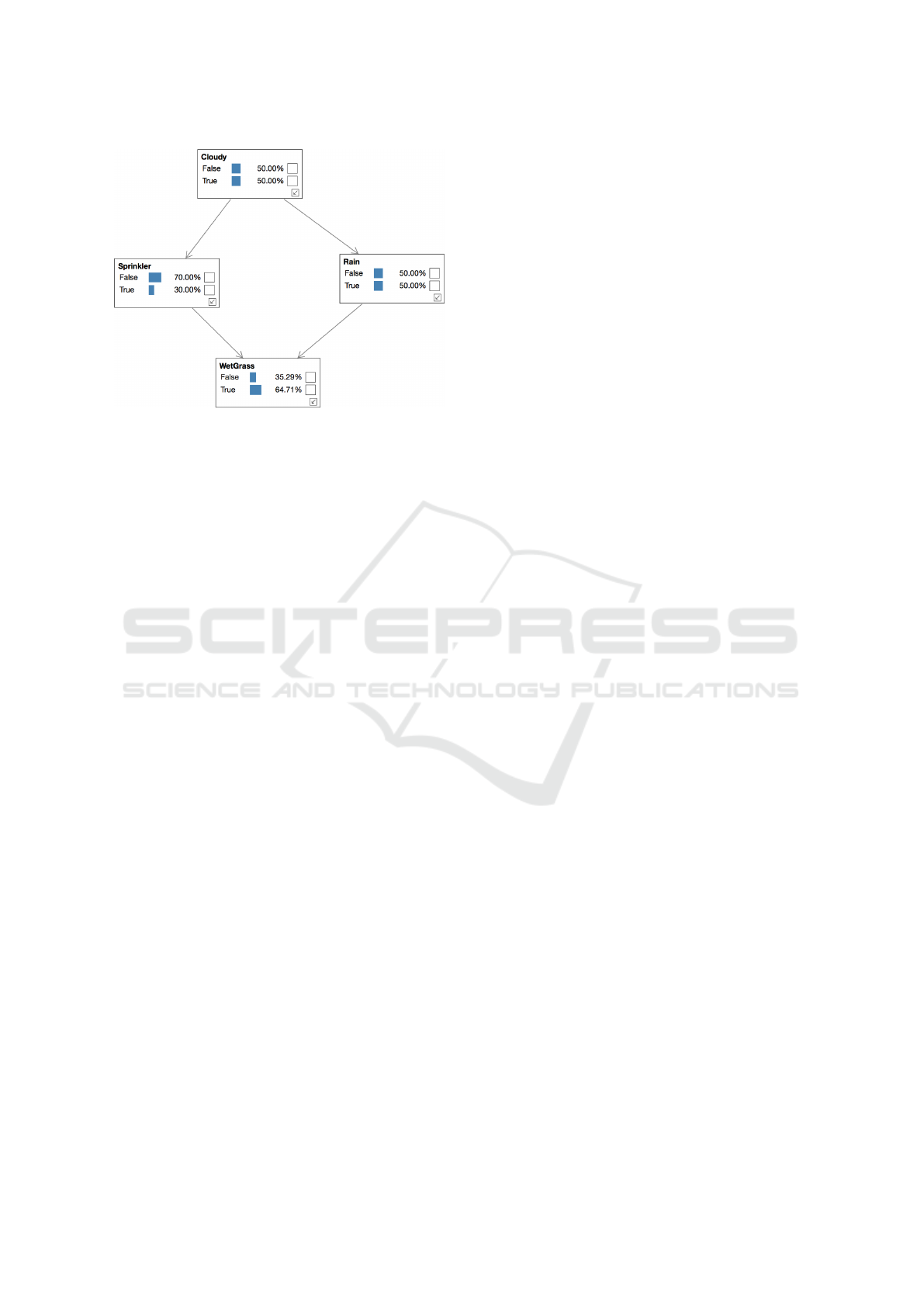
Figure 2: Wet Grass Bayes Net.
in Figure 2. Using our similarity methods, the algo-
rithm successfully avoids choosing both “S” (Sprin-
kler) and “R” (Rain) to increase the probability when
the two are not given. However, when either “S” or
“R” is an observation, the algorithm chooses the cor-
responding node to increase the probability of grass
being wet. However, it appears to strongly weight hy-
potheses that perform well in the first stage, especially
if the graph is small. As an example, when given
“W” (WetGrass) while observing “C” (Cloudy), the
algorithm chooses “S” as the cause, as it performs
better in the first phase and there are only two hy-
potheses, “S” and “R”, and the algorithm chooses the
top half for these testing purposes. Overall, this sys-
tem chooses simple hypotheses with no extraneous
information that aim to increase probability of the
observed effects, while also taking into account the
probability of the hypotheses.
6.3 Discussion
While our algorithms produce reasonable explana-
tions for small graphs, it remains to be seen how well
these methods scale to exponentially larger networks,
and how they adapt to non-Bayesian probability the-
ories or graphical models. As such, we view this
work as a preliminary investigation into using prob-
abilistic structures to develop abductive explanations,
in comparison to the large body of previous work
in abductive computation which has focused primar-
ily on symbolic methods and formal logic (Ng and
Mooney, 1992; Mooney, 2000; Juba, 2016; Ignatiev
et al., 2019).
7 CONCLUSION
The purpose of our abductive search model is to de-
velop plausible explanations for surprising phenom-
ena. Approaching this scenario as a search problem,
we are interested in finding our search target, which
is a set of the most promising potential hypothetical
causes for the unexplained observed events. The fit
of a hypothesis relative to known data is measured
by P(O
O
O | H
H
H), which is the probability of the observed
events occurring given that the hypothesis is also true.
So, we want a set of hypotheses C
C
C
P
P
P
= H
H
H
1
1
1
,...,H
H
H
m
m
m
that, for each H
H
H
i
i
i
∈ C
C
C
P
P
P
, 1) optimizes the measure of fit
P(O
O
O | H
H
H
i
i
i
), and 2) has a high P(H
H
H
i
i
i
| O
O
O) value relative
to other hypotheses.
Having established criteria for a search target,
we apply an abductive search strategy to find these
promising potential hypotheses. We deemed abduc-
tion as the most effective form of inference for ad-
dressing such problems, including the data corruption
one, where a) known information is incomplete and
b) a set of novel hypotheses are the search target.
We used graphical models—specifically, Bayesian
networks—to represent both the causal relationships
within a search space and the elements of abductive
search.
We present hypothesis selection, generation, and
comparison as the primary methods for finding
promising potential hypotheses. Our hypothesis se-
lection criteria is based upon Reichenbach’s Common
Cause Principle. In the case that no common cause
hypothesis exists, we rely on hypothesis generation
to produce novel potential common cause hypothe-
ses. These generated hypotheses can be a) multivari-
ate hypotheses, b) partial explanations, or c) gener-
ated edges. Then, having obtained the set of all po-
tential hypothetical causes, we subject the individual
elements to hypothesis comparison, selecting the hy-
pothesis that maximizes P(H
H
H | O
O
O).
Future research on probabilistic abduction’s ex-
planatory capabilities can be conducted with regards
to search algorithms in general, which are often
viewed as black-box methods. We also see Bayes’
Theorem as a tool for bridging theoretical abductive
search methods—such as those presented in this pa-
per, those in (Schurz, 2008), and those in (Cox et al.,
1992)—with machine learning classification from in-
complete or fuzzy data.
Other future work includes analyzing algorithmic
scaling and implementing methods such as dynamic
programming to reduce algorithm runtime, as well
as further exploring effective hypothesis generation
methods by examining the effects of edge genera-
tion on hidden variables in a Bayesian network and
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
570

the implications of successive edge generation on our
model’s predictive accuracy.
ACKNOWLEDGEMENTS
This research was supported in part by Harvey Mudd
College and the National Science Foundation under
Grant No. 1950885. Any opinions, findings or con-
clusions expressed are the authors’ alone, and do not
necessarily reflect the views of Harvey Mudd College
or the National Science Foundation.
REFERENCES
Agrawal, R. and Srikant, R. (1994). Fast Algorithms for
Mining Association Rules. Proceeding of the 20th
VLDB Conference, pages 487–499.
Bayes Server (2020). Live Examples. https://www.
bayesserver.com/. Accessed: 2020/09/25.
Bunke, H. (1997). On a relation between graph edit distance
and maximum common subgraph. Pattern Recogni-
tion Letters, 18(8):689–694.
Chen, Y.-C., Wheeler, T. A., and Kochenderfer, M. J.
(2017). Learning discrete Bayesian networks from
continuous data. Journal of Artificial Intelligence Re-
search, 59:103–132.
Cox, P., Knill, E., and Pietrzykowski, T. (1992). Abduction
in logic programming with equality. In Proceedings
of the Eighth International Conference on Fifth Gen-
eration Computer Systems.
Feldbacher-Escamilla, C. J. and Gebharter, A. (2019). Mod-
eling creative abduction Bayesian style. European
Journal for Philosophy of Science, 9(1):9.
Friedman, N., Goldszmidt, M., et al. (1996). Discretiz-
ing continuous attributes while learning Bayesian net-
works. In Proceeding of the Thirteenth International
Conference on Machine Learning, pages 157–165.
Ignatiev, A., Narodytska, N., and Marques-Silva, J. (2019).
Abduction-based explanations for machine learning
models. In Proceeding of the Thirty-Third AAAI Con-
ference on Artificial Intelligence, volume 33, pages
1511–1519.
Juba, B. (2016). Learning abductive reasoning using
random examples. In Proceedings of the Thirti-
eth AAAI Conference on Artificial Intelligence, pages
999–1007. Citeseer.
Mooney, R. J. (2000). Integrating abduction and induction
in machine learning. Abduction and Induction, pages
181–191.
Ng, H. T. and Mooney, R. J. (1992). A First-Order Horn-
Clause Abductive System and Its Use in Plan Recog-
nition and Diagnosis. Technical report, Department
of Computer Sciences, The University of Texas at
Austin.
Pearl, J. (1998). Graphical models for probabilistic and
causal reasoning. Handbook of Defeasible Reasoning
and Uncertainty Management Systems, 1:367–389.
Prendinger, H. and Ishizuka, M. (2005). A creative abduc-
tion approach to scientific and knowledge discovery.
Knowledge-Based Systems, 18(7):321–326.
Reiter, R. (1987). A theory of diagnosis from first princi-
ples. Artificial intelligence, 32(1):57–95.
Schurz, G. (2008). Patterns of abduction. Synthese,
164(2):201–234.
A Probabilistic Theory of Abductive Reasoning
571
