
Blockchain-based Task-centric Team Building
Alexander Jahl, Stefan Jakob, Harun Baraki, Yasin Alhamwy and Kurt Geihs
Distributed Systems Department, University of Kassel, Wilhelmsh
¨
oher Allee, Kassel, Germany
Keywords:
Multi-Agent Systems, Cooperation and Coordination, Self Organizing Systems, Agent Models and
Architectures, Task Planning and Execution.
Abstract:
Large-scale dynamic environments like Industry 4.0, Smart Cities, and Search & Rescue missions require
a distributed and effective management of participating autonomous units. Usually, these units and their
capabilities are heterogeneous and partially unknown at design time. Thus, the management has to adapt
dynamically to the current situation. Several units have to collaborate to solve common tasks, and thus have to
share their knowledge. However, complex tasks typically require the splitting of a team of units into subteams
that solve smaller subtasks. A common approach to tackle this problem is to employ a decentralised, self-
organising system. Traditionally, such systems are modelled either agent-centric or organisation-centric. In
contrast, in this paper we shift the focus to a task-centric view. Tasks are enabled to search and bind suitable
execution units based on their capabilities. These units can be either single agents, teams of agents, or teams
of teams. A blockchain-based allocation model supports the task-centric view and controls the distributed
task assignment. We present a proof-of-concept implementation that shows the viability of our presented
approach.
1 INTRODUCTION
Teamwork is essential in large-scale dynamic do-
mains, such as Search & Rescue operations in dis-
aster scenarios, Industry 4.0 applications, Smart City,
and warehouse logistics. In these areas, devices of
different parties are applied, which vary in their capa-
bilities and knowledge representation. In smart ware-
house logistics, for example, applications run in the
Cloud, on local edge servers, and on robots equipped
with various sensors and actuators. The collaboration
requires efficient and effective management. One op-
tion to realise such collaborative behaviour is the co-
ordination management by a central instance. This
leads to some disadvantages, such as bottlenecks, sin-
gle point of failures, constant communication, and
limited scalability. Applications in such dynamic do-
mains would benefit from features provided by decen-
tralised and self-organising systems that do not in-
troduce the aforementioned shortcomings. Further-
more, self-organising systems allow applications to
adapt to changes in their structure and their environ-
ment. However, team coordination and teamwork ex-
ecution lead to several non-trivial problems that need
to be solved. These include, for example, distributed
coordination, heterogeneous knowledge representa-
tion, and decentralised decision making. The re-
search fields of self-organisation (Martin-Flatin et al.,
2006; De Wolf and Holvoet, 2004) and swarm tech-
nology (Brambilla et al., 2013) focus on these prob-
lems which are addressed especially by multi-agent
systems and their distributed design. Applications in
this area can be considered from the agent-centric and
the organisation-centric view (Picard et al., 2009).
On the one hand, these views focus on local agent
behaviour and apply techniques in the field of swarm
intelligent algorithms to assign tasks. On the other
hand, they focus on system organisation and use tech-
niques to solve the task allocation problem of type-
based approaches and market-based algorithms.
In contrast, we present an architecture that is
based on a task-centric view. It applies the Unit-Skill-
Task model presented in (Jahl et al., 2021) that allows
task instances to actively search for suitable execu-
tion units and bind them to themselves. This approach
offers benefits such as scalability, robustness and dy-
namic adaptations depending on the current situation
and in the case of environment changes. A short in-
troduction to this model can be found in Section 2.
This paper extends the concept, focusing in particular
on the key challenges of self-organised team building
and allocation of execution units to tasks.
The main contribution of this paper is the new dy-
namic self-organised system for teams and teams-in-
250
Jahl, A., Jakob, S., Baraki, H., Alhamwy, Y. and Geihs, K.
Blockchain-based Task-centric Team Building.
DOI: 10.5220/0010227402500257
In Proceedings of the 13th International Conference on Agents and Artificial Intelligence (ICAART 2021) - Volume 1, pages 250-257
ISBN: 978-989-758-484-8
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

teams using the novel task-centric view. The system
addresses specific requirements that are essential for
critical systems in the area of Industry 4.0, Smart City
etc. Here, the key challenges are robustness, reliabil-
ity, transparency, security and access control. Hence,
our system integrates a distributed blockchain ap-
proach that supports grouping of execution units and
active unit-task allocation. The distributed blockchain
fulfils in particular the mentioned requirements. Fur-
thermore, it ensures the correct distribution of the cur-
rent state of the token in the blockchain network, man-
ages the allocation of execution units to active tasks
by tokens in a coordinated manner, and organises the
teams and teams in teams that have been created.
The structure of the paper is organised as follows.
In Section 2, we provide an overview of the underly-
ing foundational concepts and frameworks. Section 3
presents the unit-task allocation concept and addi-
tional implementation details. Section 4 shows the
experiments and analyses the results. Related work is
discussed in Section 5, and Section 6 concludes the
paper.
2 FOUNDATIONS
In this section, we introduce the foundations of our
work. This includes a brief introduction of task allo-
cation, distributed blockchain, and Answer Set Pro-
gramming. Additionally, we present a short overview
of our previous work (Jahl et al., 2021), a task-centric
Unit-Skill-Task model for hierarchical team manage-
ment, which is continued in this work.
2.1 Task Allocation
In a multi-agent system, agents cooperate or collabo-
rate to solve different kinds of tasks. The challenge
of task assignment is to decide which agent should
perform which task. Task assignment with multi-
ple agents increases the complexity since, in the sim-
plest case, the best possible mapping from agents to
tasks still requires polynomial time. Hence, com-
mon methods approximate the exact solution but do
not guarantee it. Furthermore, the complexity of the
task affects the number of agents that are required to
perform the task. Properties such as agent budgets,
task costs, time, capacity limitations, etc., may have
a great influence on the complexity, but vary depend-
ing on the agent-task assignment. A task allocation
without any additional properties commonly refers to
a balanced assignment problem where the number of
agents matches the number of tasks. (Gerkey and
Matari
´
c, 2004) define a common classification for dif-
ferent task allocation categories. The classification
distinguishes different combinations of single or mul-
tiple agents, single or multiple tasks, as well as instan-
taneous assignment and time-extended assignment.
These correspond to the different complexity classes.
While most works consider the combinations of sin-
gle agents and single tasks, several works use combi-
nations of a single task and multiple agents to realise
architectures that provide coalition formation. Differ-
ent methods, such as market-based, threshold-based,
swarm intelligent, utility-based, and consensus-based
algorithms, have already been evaluated in various
studies which solve the problem of task allocation.
They are distinguished by two categories: centralised
and decentralised task allocation (Ye et al., 2016;
Turner, 2018). In centralised task assignment sys-
tems, a central entity calculates the task allocations
for all agents. It collects all information about the
agents and thus can optimise the overall target. Con-
sequently, the central entity is the bottleneck of the
system. It has to communicate with each agent and
must not fail. The decentralised task allocation al-
lows the simultaneous execution of the task assign-
ment on each agent. By communicating the partial
solutions of the agents among themselves, a common
solution is found. This requires a consensus process,
since different agents may have different information
about the current situation, which may result in differ-
ent solutions. Assigning and exchanging roles allows
agents to compute a consistent solution and to execute
a task more efficiently.
2.2 Blockchain Technology
A blockchain is a distributed ledger, i. e. recorded
set of transactions. It represents a decentralised,
shared database. No central authority or intermedi-
ary is needed for processing, validating and authen-
ticating transactions, events, and other kinds of data
exchange. Such information can only be stored in
the ledger if all involved parties agree using some
kind of consensus algorithm. Once information is
entered into the ledger it can never be deleted. A
distributed blockchain enables a distributed peer-to-
peer network. Untrustworthy participants can inter-
act in a verifiable manner without a trusted interme-
diary (Crosby et al., 2016). Various kinds of scripting
languages allow the blockchain users to define smart
contracts. These contract scripts correspond to proce-
dures or methods that are stored in the blockchain.
One distributed ledger platform for running smart
contracts in a permissioned blockchain network is
the Hyperledger Sawtooth framework (Olson et al.,
2018). This framework is designed with a focus on
Blockchain-based Task-centric Team Building
251

modularity, extensibility, and larger networks. It pro-
vides basic features such as the communication be-
tween the nodes of a network, the storage manage-
ment of data in the blockchain, and the architecture
to connect smart contract and consensus algorithms.
Each node in the network includes a validator and a
set of transaction processors (see Figure 1).
Client
Client
Client
Blockchain Node
Blockchain Node
Blockchain Node
Validator
Transaction
Processor
Transaction
Processor
Transaction
Processor
P2P
Network
Figure 1: Hyperledger Sawtooth architecture.
The validator manages transactions, consensus, the
blockchain, connections to other nodes, and the in-
ternal state. Hyperledger Sawtooth identifies entities
based on their public key and thus manages transac-
tion and validator permissions. Instead of handling
lists of public keys, Hyperledger Sawtooth utilises a
dedicated family of transactions. Each transaction
is processed by a transaction processor which han-
dles the predefined transaction family. Hyperledger
Sawtooth allows network authorisation directly at the
peer-to-peer level. Each individual Sawtooth node
can be managed by controlling the connection access
to the Hyperledger Sawtooth network, the synchroni-
sation with the current ledger state, sending of con-
sensus messages, participation on the consensus pro-
cess, and transmission of transactions to the network.
2.3 Answer Set Programming
Answer Set Programming (ASP) (Gelfond and Kahl,
2014) is a declarative problem solving paradigm. It
roots in logic programming, allows non-monotonic
reasoning, and provides defaults for expressing stan-
dard representations. ASP can be applied in domains
like planning, optimization, and decision making for
solving NP and NP
NP
problems. Instead of providing
an algorithm to solve a problem, an ASP program de-
scribes the problem itself. An answer set solver then
takes the ASP program as input and returns all solu-
tions (answer sets) for that program. An ASP program
includes a set of rules, where a rule is formalised as
shown in (1).
a ← b
1
,...,b
m
, not c
1
,...,not c
k
where {a,b
1
,...,b
m
,c
1
,...,c
k
} ⊆ A
(1)
a represents the head of the rule. b
1
,...,b
m
specify the
positive body and not c
1
,...,not c
k
the negative body.
The complete body is the conjunction of the positive
and negative body. A is the set of all available atoms.
The head a is true if all positive literals (b
1
,...,b
m
)
in the body are true and no negative literal (c
1
,...,c
k
)
holds. A rule without a body is a fact since it is uncon-
ditionally true. A rule without a head is a constraint .
In the case that a constraint holds, false is derived and,
thus, the respective answer set is discarded. Further-
more, ASP distinguishes between two kinds of nega-
tion.
innocent ← not guilty (2)
innocent ← ¬guilty (3)
The rule (2) is a negation as failure. It defines that
someone is innocent until proven guilty. In contrast,
rule (3) represents the strong respectively classical
negation. With these specifications, it is feasible to
model a knowledge representation. The rules (4-7)
illustrate a simple example.
bird(X) ← eagle(X) (4)
bird(X) ← penguin(X) (5)
¬ f ly(X) ← penguin(X) (6)
f ly(X) ← bird(X), not ¬ f ly(X) (7)
Rule (4) and (5) define that eagle and penguin are
birds, while rule (6) specifies that a penguin cannot
f ly. Finally, rule (7) describes that if ¬ f ly(X) can-
not be derived for a bird, it can f ly. The key advan-
tage of ASP is that knowledge or given defaults can
be changed and extended at runtime by new informa-
tion without causing inconsistencies. This is essential
in dynamic and heterogeneous environments.
2.4 Task-centric Unit-Skill-Task Model
In our task-centric Unit-Skill-Task concept, presented
in (Jahl et al., 2021), the task-centric view defines a
task as a separate active element that is independent
of agents.
Complex Skills Primitive Skills
Characteristic
Behaviour
Action
Perception
Capability
Skill
Figure 2: Skill classification.
Moreover, the concept abstracts each agent or team
into a SKILL-Unit that has specific skills and serves
as an execution unit. Figure 2 presents two types of
skills. While Primitive Skills represent characteristics
and capabilities, Complex Skills describe behaviours,
actions, and sensory perceptions. Complex Skills can
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
252
depend on certain Primitive Skills. SKILL-Units can
contain other SKILL-Units. All enclosed SKILL-Units
pass on their set of Skills to the aggregated SKILL-
Unit. A pool of units provides idle SKILL-Units
where each unit can contain units via a hierarchical
model. Tasks actively search for suitable SKILL-Units
and bind them.
Task Skill Unit
Task Requirements
Provided by Unit
Figure 3: Unit-Skill-Task concept.
The Unit-Skill-Task concept, shown in Figure 3, con-
siders the allocation of SKILL-Units to tasks from the
task-centric view. It is formalised as a tuple
c = (t, u) where ∀s ∈ S
t
: s ∈ S
u
(8)
For the concept c, a SKILL-Unit u with the Skill set S
u
that can perform a task t has to fulfil the Skill require-
ments S
t
of the task t. The allocation matrix A for all
units is then
a
tu
=
(
1 if c
tu
is fulfilled
0 otherwise
(9)
Tasks can be assigned to several SKILL-Units. This
means that they are executed multiple times in paral-
lel. Finally, plans contain one or several tasks and
subplans, which in turn can contain subplans with
subtasks, resulting in a plan tree. Each plan represents
a team. Thus, all units bound by the tasks contained
in the plan are team members.
3 UNIT-TASK MANAGEMENT
This section presents our dynamic team and teams-
in-teams organisation management of execution units.
The task-centric Unit-Skill-Task model (Section 2.4)
results in several requirements for the unit-task man-
agement. A separation of tasks and execution units is
necessary. Tasks must be able to actively search for
suitable execution units and bind them to themselves.
Furthermore, unbound execution units should be ac-
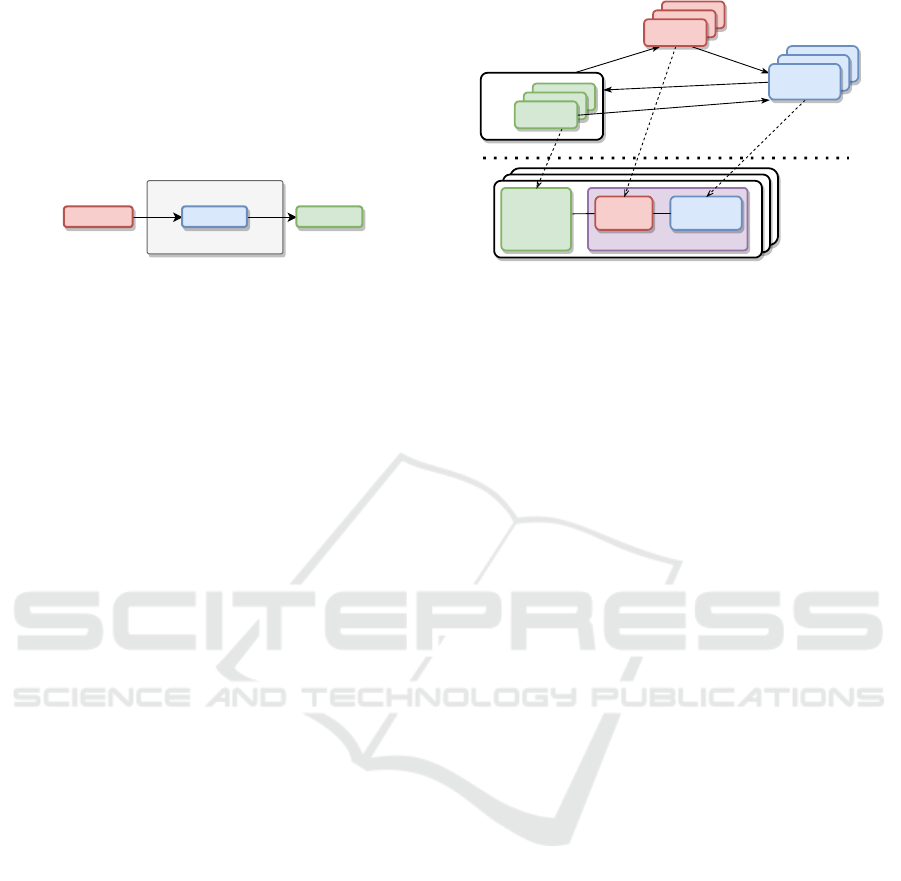
cessible via a pool. Figure 4 shows the blockchain-
based SKILL-Unit task model.
The basic concept of the unit-task management at
the top illustrates the conceptual separation and inter-
action of SKILL-Units, tasks, and blockchain nodes.
The resulting P2P architecture at the bottom virtu-
alises the tasks as part of the blockchain component
and combines them with the SKILL-Unit to form a
P2P node. The blockchain component is based on
Blockchain Node Component
Blockchain
Node
Atomic
SKILL-Unit
Component
Task
Manager
Unit Pool
Task
Task
Task
SKILL-Unit
SKILL-Unit
SKILL-Unit
Blockchain
Node
Blockchain
Node
Blockchain
Node
search &
update
SKILL-Units
Manage Grouping
Register
allocated
Basic Concept
P2P
Architecture
Figure 4: Blockchain-based SKILL-Unit task model.
nodes of a permissioned blockchain network, as de-
scribed in Section 2.2 and extended by a unit-task
management. In the implementation, Hyperledger
Sawtooth is used to realise blockchain node compo-
nents. This allows it to use the database and consis-
tency mechanisms provided by the blockchain. As
shown in Figure 4, the P2P architecture thus in-
cludes pairwise combinations of SKILL-Units and
blockchain nodes as peers.
The initial step towards creating a network of
blockchain-based SKILL-Unit task nodes is the join-
ing process. This process is controlled by the
TaskManager. The first node that is started initialises
the main group, which corresponds to the unit pool
described in the task-centric Unit-Skill-Task model.
In general, a group refers to all SKILL-Units that share
a symmetric secret key to encrypt messages. En-
crypted group messages are communicated via broad-
cast. Only members have the secret key and can de-
crypt the messages. Therefore, the starting node de-
fines a secret key and creates a transaction to store
all group information in the blockchain. Additionally,
the node registers for all events of this group and sets
itself as maintainer for the group voting. Subgroups
can be created in the same way through initial nodes.
A new node that wants to join the network has to
send a join request to the network via a specific ad-
dress. The group voting maintainer gets the request
and then starts the voting process. If the result of the
votes are positive, the secret key is sent to the new
node. Subsequently, it will become a member of the
group, and thus part of the network. The mechanism
of the voting process is shown as pseudo code in Al-
gorithm 1.
The algorithm requires a voting strategy (Line 2)
and the number of group members (Line 3) which
are involved in the voting. The voting strategy can
be defined individually for each group but is then the
same for all members of the group. A voting strat-
egy can be, for example, a majority decision. The
strategy may be chosen according to the desired se-
Blockchain-based Task-centric Team Building
253

Algorithm 1: Voting Mechanism.
1 GroupVotingMaintainer M
2 VotingStrategy S
3 NumberOfParticipants P
Input : Candidate C, Group G
Output: Voting Result
4 broadcast VotingRequest for C in G
5 while no timeout and responses.size < P do
wait for responses
6 if new response then
7 add response to listO f Results
8 S validates the listO f Results and stores
results in votingResult
9 if votingResult is access granted then
10 set C as new M of G
11 return votingResult
curity. The number of group members participating
in the vote is also determined individually when the
group is created. A selection strategy is used to se-
lect the involved members by themselves. To avoid
unnecessary communication, the selection strategy al-
lows members to know without additional communi-
cation, whether they are involved in the current voting
or not. Therefore, the selection is only dependent on
the total number of group members and the defined
number of involved voters. An example is shown in
Algorithm 2. This algorithm allows the group mem-
ber to know whether it is a voter or not by means of
simple modulo calculation and, if necessary, to trig-
ger the calculation of the votes afterwards. The group
and the candidate are required as input for the voting
algorithm. The group voting maintainer who received
the request sends a broadcast to the group (Line 4 in
Algorithm 1). Subsequently, the maintainer waits for
the answers until the number of responses reaches the
number of voters or a defined timeout occurs (Line 5-
7 in Algorithm 1). The answers are collected in a list.
Finally, the voting strategy processes the list, e. g. to
check whether a majority has voted for it. In case the
result is positive, the candidate is assigned as the new
group voting maintainer, and the result is published in
the blockchain (Line 8-11 in Algorithm 1).
The network is now able to create groups and sub-
groups dynamically. Due to the described group ad-
ministration, only members are allowed to grant ac-
cess to candidates. Furthermore, only members can
read encrypted messages that are distributed inside
the group. Nodes in the network can create not only
new subgroups and invite other nodes, but also are
able to remove themselves from a subgroup. Further-
Algorithm 2: Selection Strategy.
Input : MemberList M,
NumberOfParticipants P
1 p ← get own position in M
2 i ← M/P
3 m ← (p+1) mod i
4 if m = 0 then voting participant
5 calculate votes
6 send votes to the group
more, the last node in a subgroup can delete the group.
If one member in the group no longer meets the Skill
requirements of the task or is unavailable, the task can
not be executed anymore. The group is released and
dissolved and the contained members are returned to
the main group (unit pool group). This mechanism
provides the basis for the unit-task assignment. Since
an individual unit is not able to assess the needs of all
tasks in the whole system, it is reasonable to delegate
the allocation process to the individual tasks, as de-
scribed in (Jahl et al., 2021). An appropriate solution
to deal with the unit-task allocation in a decentralised
way is to apply a token-based approach. The token
communication allows minimising computational and
communication efforts. To realise the blockchain-
based SKILL-Unit task approach, the token contains
information about available tasks, their Skill require-
ments, and their already allocated units as well as a
list of not yet visited units. The token is stored in
and communicated over the blockchain. Only nodes
whose unit are in the unit pool group have access to
the token. Tasks that need units are listed in the to-
ken and thus can be checked by the TaskManager of
the current token owner node. Not every unit in the
network needs to know the current formation and the
current Skill set of the group members.
Algorithm 3 illustrates the process of token han-
dling in the TaskManager. All non-executed tasks
stored in the token are called consecutively (Line 1).
The plan which is associated with the current task
needs a subgroup in the unit pool group in the
blockchain (Lines 4-5). Skills required to perform the
task are then compared with the Skills provided by the
unit (Line 6). The comparison is based on a shared
ontology described in a logic programming language.
For the experimental implementation, ASP (see Sec-
tion 2.3) is used, since it allows simple and read-
able definitions and offers several high-performance
solvers. To compute the Skill set S
tu
in Algorithm 3 in
Line 6, a matching rule (see Listing 1) specifies that
a SKILL is missing in case a task requires a SKILL
which is not given by the UNIT. This rule remains the
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
254

Algorithm 3: Token Mechanism.
Input : Received Token
1 get non-executed tasks from token
2 forall task t in non-executed tasks do
3 get plan p
t
that is associated with t
4 if p
t
has no sub group then
5 create sub group for p
t
6 compute Skills S
tu
= S
t
\ S
u
7 if S
tu
is ∅ then
8 allocate unit u to task t
9 remove t from token
10 if all tasks in p
t
have units then
11 create new unit u
p
with all Skills
of all tasks in p
t
12 break
13 remove visited unit u from unit pool in the
token
14 if there are still non-executed tasks then
15 send the token to a not yet visited unit in
the unit pool group
same for each execution, since TASK, SKILL, and UNIT
are assigned to the current representatives.
1 mis s i ng ( SKILL ) :- ta s k ( TASK ) ,
re q u ire ( TASK , SKIL L ) , unit ( UN I T )
, n o t has ( UNIT , S K I LL ) .
Listing 1: Matching rule.
The required rules which represent all facts for the
considered unit and currently active task are gener-
ated individually. Therefore several generating tem-
plates (see Listing 2) are defined which need both as
input. TASK , UNIT , and SKILL are placeholders
and will be replaced by the current identifiers of the
task and the unit and their Skills. Lines 1 and 3 gen-
erate the two facts for the task and unit identifier as
an ASP program. While Line 2 is executed as often
as Skills are available in the task, the same occurs for
the unit in Line 4. A corresponding number of Skill
facts are generated. Afterwards, the missing rule (see
Listing 1) and the generated facts are combined to one
ASP program.
1 task ( _TA S K_ ) .
2 re q ui re ( _TASK_ , _SK I LL _ ).
3 unit ( _UN I T_ ) .
4 has ( _UNIT_ , _S K IL L_ ).
Listing 2: Rule templates.
The run time that a task needs to calculate all map-
pings is the sum of all run times of comparing its re-
quired Skills with the Skills of each unit in the unit
pool. In case, there is a matching between both Skill
sets, the current task allocates the current unit, stores
the matching result in the blockchain, and removes
itself from the task list in the token (Lines 8-9 in Al-
gorithm 3). Subsequently, all tasks of the current plan
are checked whether they are in the unit list of the
token. If no task can be found in the list, a new unit
will be created that represents the subgroup of the cur-
rent plan and includes all Skills of the included units
(Lines 10-12 in Algorithm 3). Finally, the visited unit
is removed from the unit pool, and the token is sent to
the next unvisited unit (Lines 13-15 in Algorithm 3).
A self-developing network of individual teams
and teams within teams is created. Since the tasks ac-
tively search for units with suitable Skills and decide
themselves to bind them, no optimisation of the task
allocation is necessary. All restrictions for the alloca-
tion process are modelled in the Skill requirements of
the tasks. Communication to coordinate the coopera-
tion of units in individual teams is not explicitly part
of the blockchain network. Therefore, the resulting
network includes two communication channels, one
for communication across the distributed blockchain
nodes and one for communication between the units
within the task subgroups.
4 EXPERIMENTAL RESULTS
We have implemented our framework based on our
modified version of Hyperledger Sawtooth. Our
framework is optimised for the communication of
agent-based systems. It allows simplified access to
encrypted sockets, the blockchain, and its event sub-
system. To evaluate the allocation of units to tasks
and the building process of teams and the teams in
teams, a smart warehouse example as presented in
(Jahl et al., 2021).
The scenario has a plan tree (see Section 2.4)
which includes all tasks. The tasks can only be suc-
cessfully executed through teamwork. The root plan
of the tree is the Warehouse Plan. It includes the Main
Task and two sub plans, Service Sub Plan and Robots
Sub Plan. The Service Sub Plan contains two tasks,
Edge Service Task and Cloud Service Task. While
the Edge Service Task needs the Skill workAsNaviga-
tor, the Cloud Service Task requires the Skill workAs-
KnowledgeBase. The Robots Sub Plan in turn in-
cludes two tasks, Transport Robot Task and UAV Task.
The Transport Robot Task needs the Skill canTrans-
port and the UAV Task requires the Skill canFly. The
Blockchain-based Task-centric Team Building
255

Main Task contains all requirements of all tasks of the
sub plans. Hence, it needs the Skills workAsNaviga-
tor, workAsKnowledgeBase, canTransport, and can-
Fly. Furthermore, the ASP program mentioned in
Section 3 is necessary for the correct functionality
of the framework. Therefore, the program needs the
matching rule in Listing 1 and additional individual
rules generated at runtime (see Listing 2 in Section 3).
1 task ( ua v T ask ) .
2 re q ui re ( ua v T a s k , c anT r ans p ort ) .
3 unit ( ua v ) .
4 has ( uav , c anT r ans p or t ).
Listing 3: Generated rules.
As an example for these generated rules, the UAV
Task and the execution unit UAV are considered. List-
ing 3 shows the rules (facts) for the UAV Task (Line 1)
and the required Skill canTransport (Line 2) on the
one hand. On the other hand, it includes the facts
for the unit UAV (Line 3) and the available Skill
canTransport (Line 4). The complete ASP program
consists of the missing rule and all generated facts.
The filter query subsequently extracts any missing
facts from the resulting answer set, consisting of the
missing facts and generated facts. For the presented
example rules, the answer set is then empty, since the
uavTask requires the canTransport Skill which is
provided by the uav unit. For the smart warehouse
example, calculating a mapping of the Skill sets for
one task and one unit takes on average 3 ms.
5 RELATED WORK
Teamwork, especially in the field of multi-agent sys-
tems is a well-studied area of research (Geihs, 2020).
In this context, coalition forming and team organi-
sation are essential to establish cooperation between
agents. Researchers in this area address, in particular,
the task allocation problem. As already mentioned in
the introduction, centralised solutions are not suitable
for the task allocation problem addressed in this pa-
per due to the disadvantages of a central entity such
as bottlenecks, single-point-of-failures, and commu-
nication and participant limitations.
Threshold-based task allocation methods are ad-
dressed by many works. These methods combine
each agent with an activation threshold for each task
that needs to be performed. They observe signals of
tasks or role allocation processes and react to these
if it surpasses an internal threshold. While sim-
ple approaches use fixed thresholds, most approaches
focus on adaptive threshold methods. The authors
in (Ferreira et al., 2010) solve task allocation with
Swarm-GAP. Agents in this probabilistic approach se-
lect tasks using a model that adapts the distribution of
tasks among social insects. If an agent perceives an
incomplete task in the current environment, it can ini-
tiate the creation of a token that is only applied to this
task. This token is then generated by a central entity
whereas in our approach the token is generated and
managed by the distributed blockchain. However, in
contrast to our approach, agents only perceive tasks
in their local environment. This assumption can limit
the amount of tasks recognised by the agents.
Besides threshold-based solutions, market-based
approaches are widely used to solve task allocation
problems. These approaches apply an auctioneer that
publishes tasks inside the multi-agent system. Agents
then submit bids, indicating their costs or benefits to
perform the tasks. The auctioneer decides by means
of the various bids which agent is entrusted with
which task. (Chen et al., 2018) applies such a task
allocation method based on multi-objective optimi-
sation. The approach utilises two indicators, time
and energy, in a utility function for its optimisation.
The method provides the definition of the energy util-
ity function. The task allocation in (Iijima et al.,
2017) is based on the preferences declared by sin-
gle agents. During the task allocation process, that
maximises the utility for the shared and required per-
formance, agents can give weight to individual pref-
erences based on their own specifications and capa-
bilities. That leads to collaborative agents that can
autonomously decide their preference adaptively in
dynamic environments. This approach follows the
agent-centric view that focuses on designing local be-
haviour and peer-to-peer interactions. Instead, our so-
lution enables the task-centric view that defines a task
as a separate active element which is independent of
agents. It is tailored for environments with a dynamic
number of heterogeneous agents, but concrete tasks.
There is further work in the area of swarm in-
telligence. The approach formalised in (Dahl et al.,
2009) presents a concept of a vacancy chain schedul-
ing model for the task allocation problem in spatially
classifiable domains. The concept takes into account
variations in the performance of individual agents.
However, using a learning methods for task alloca-
tion requires additional resources and time. Another
concept is proposed in (Brutschy et al., 2014). The
authors apply tasks that are sequentially interdepen-
dent. The mechanism neither needs global knowledge
nor centralised entities. Since the approach does not
require communication between agents, it is suitable
for use in swarms of simple agents.
Other works propose methods which apply ge-
netic algorithms, for example, (Padmanabhan Panchu
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
256

et al., 2018). The approach deals with the task allo-
cation of multiple agents to multiple tasks in a decen-
tralised way. The drawback is that genetic algorithms
are not optimal for time critical solutions since no pre-
diction about the duration of the respective problem-
solving is possible. Even with simple genotypes, such
algorithms rapidly reach limits due to memory con-
sumption and computing speed.
However, the fact that the agents in the related
work receive the tasks is different from the approach
presented in this paper. Here, agents, or the respec-
tive units have no influence on the assignment. Fur-
thermore, the allocation process inside a task does not
require an optimisation algorithm to assign units to
tasks. It should be as simple as possible; first come,
first serve.
6 CONCLUSIONS
This paper presents a self-organised, task-centric sys-
tem for teams and teams-in-teams. It allows tasks
to independently search for suitable execution units
and to bind them. For this purpose, the task-centric
Unit-Skill-Task model is integrated into a distributed-
blockchain-based approach. Since the individual
tasks themselves are responsible for the allocation,
optimisation methods are not necessary to assign
them. Units do not need to have global knowledge.
Without optimisation and by the distribution of data
on the blockchain, the overall resource consumption
is reduced.
Our on-going research focusses primarily on the
following aspects: (1) The development of an auto-
mated Skill management powered by behaviour mod-
els and logic-program-based decision making; (2) the
separation of the knowledge into Reflection Layers;
(3) the implementation of Transferable Behaviours;
and (4) the integration of the Skill management, the
Reflection Layers, and the Transferable Behaviours
in our blockchain-based framework and a subsequent
evaluation in a real, automated warehouse scenario.
REFERENCES
Brambilla, M., Ferrante, E., Birattari, M., and Dorigo, M.
(2013). Swarm Robotics: A Review from the Swarm
Engineering Perspective. Swarm Intelligence, 7(1):1–
41.
Brutschy, A., Pini, G., Pinciroli, C., Birattari, M., and
Dorigo, M. (2014). Self-organized Task Alloca-
tion to Sequentially Interdependent Tasks in Swarm
Robotics. Autonomous agents and multi-agent sys-
tems, 28(1):101–125.
Chen, J., Wang, J., Xiao, Q., and Chen, C. (2018). A
Multi-Robot Task Allocation Method Based on Multi-
Objective Optimization. In 15th ICARCV 2018, pages
1868–1873. IEEE.
Crosby, M., Pattanayak, P., Verma, S., Kalyanaraman, V.,
et al. (2016). Blockchain Technology: Beyond Bit-
coin. Applied Innovation, 2(6-10):71.
Dahl, T. S., Matari
´
c, M., and Sukhatme, G. S. (2009).
Multi-robot Task Allocation through Vacancy Chain
Scheduling. Robotics and Autonomous Systems, 57(6-
7):674–687.
De Wolf, T. and Holvoet, T. (2004). Emergence versus Self-
organisation: Different Concepts but Promising when
Combined. In International workshop on engineering
self-organising applications, pages 1–15. Springer.
Ferreira, P. R., Dos Santos, F., Bazzan, A. L., Epstein, D.,
and Waskow, S. J. (2010). RoboCup Rescue as Mul-
tiagent Task Allocation among Teams: Experiments
with Task Interdependencies. Autonomous Agents and
Multi-Agent Systems, 20(3):421–443.
Geihs, K. (2020). Engineering Challenges Ahead for Robot
Teamwork in Dynamic Environments. Applied Sci-
ences, 10(4):1368.
Gelfond, M. and Kahl, Y. (2014). Knowledge Representa-
tion, Reasoning, and the Design of Intelligent Agents:
The Answer-Set Programming Approach. Cambridge
University Press.
Gerkey, B. P. and Matari
´
c, M. J. (2004). A Formal Analysis
and Taxonomy of Task Allocation in Multi-robot Sys-
tems. The International journal of robotics research,
23(9):939–954.
Iijima, N., Sugiyama, A., Hayano, M., and Sugawara, T.
(2017). Adaptive Task Allocation based on Social
Utility and Individual Preference in Distributed En-
vironments. Procedia computer science, 112:91–98.
Jahl, A., Jakob, S., Baraki, H., and Geihs, K. (2021). Task-
centric Hierarchical Team Management. Submitted at
SAC 2021 DADS.
Martin-Flatin, J.-P., Sventek, J., and Geihs, K. (2006). Self-
managed Systems and Services. Communications of
the ACM, 49(3).
Olson, K., Bowman, M., Mitchell, J., Amundson, S., Mid-
dleton, D., and Montgomery, C. (2018). Sawtooth: An
Introduction. The Linux Foundation.
Padmanabhan Panchu, K., Rajmohan, M., Sundar, R., and
Baskaran, R. (2018). Multi-objective Optimisation
of Multi-robot Task Allocation with Precedence Con-
straints. Defence Science Journal, 68(2).
Picard, G., H
¨
ubner, J. F., Boissier, O., and Gleizes, M.-
P. (2009). Reorganisation and Self-Organisation in
Multi-Agent Systems. In 1st International Workshop
on Organizational Modeling, pages 66–80.
Turner, J. (2018). Distributed Task Allocation Optimisation
Techniques. In Proceedings of the 17th international
conference on autonomous agents and multiagent sys-
tems, pages 1786–1787.
Ye, D., Zhang, M., and Vasilakos, A. V. (2016). A Sur-
vey of Self-Organization Mechanisms in Multiagent
Systems. IEEE Transactions on Systems, Man, and
Cybernetics: Systems, 47(3):441–461.
Blockchain-based Task-centric Team Building
257
