
Using Deep Learning for Trajectory Classification
Nicksson C. A. de Freitas, Ticiana L. Coelho da Silva, Jos
´
e Ant
ˆ
onio Fernandes de Mac
ˆ
edo,
Leopoldo Melo Junior and Matheus Gomes Cordeiro
Insight Data Science Lab, Fortaleza, Brazil
Keywords:
Trajectory, Classification, Machine Learning, Deep Learning.
Abstract:
The ubiquity of GPS-enabled smartphones and automotive navigation systems connected to the Internet allows
us to monitor, collect, and analyze large trajectory data streams in real-time. Trajectory classification is an
efficient way to analyze trajectory, consisting of building a prediction model to classify a new trajectory (or
sub-trajectory) in a single-class or multi-class. The classification trajectory problem is challenging because of
the massive volume of trajectory data, the complexity associated with the data representation, the sparse nature
of the spatio-temporal points, the multidimensionality, and the number of classes can be much larger than the
number of motion patterns. Machine learning methods can handle trajectories, but they demand a feature
extraction process, and they suffer from the curse of dimensionality. On the other hand, more recent Deep
Learning models emerged to link trajectories to their generating users. Although they minimize the sparsity
problem by representing the input data as an embedding vector, these models limit themselves to deal with
multidimensional data. In this paper, we propose DeepeST (Deep Learning for Sub-Trajectory classification)
to identify the category from a large number of sub-trajectories extracted from GPS services and check-ins
data. DeepeST employs a Recurrent Neural Network (RNN), both LSTM and Bi-directional LSTM (BLSTM),
which operates on the low-dimensional to learn the underlying category. We tackled the classification problem
and conducted experiments on three real datasets with trajectories from GPS services and check-ins. We show
that DeepeST outperforms machine learning approaches and deep learning approaches from state-of-the-art.
1 INTRODUCTION
The recent advances in the sensors and communi-
cation technologies and the popularity of Location-
Based Social Networks (LBSNs) such as Foursquare,
Twitter, and Facebook contribute to the explosive
growth of trajectory data. We strongly believe that
these data provide a unique opportunity for under-
standing the patterns and behaviors of several mov-
ing objects, such as people, animals, transportation
modes, hurricanes, among others.
Trajectory data can be recorded in different for-
mats according to device types. For instance, GPS
tracking devices usually generate raw trajectories as a
consecutive sequence of spatio-temporal points sorted
in time (x, y,t), where x and y represent the spatial co-
ordinates of the moving object at timestamp t. LBSNs
collect information about their users’ visited places,
and a trajectory is a continuous sequence of check-
ins or Points of Interest (POI). Trajectories collected
from LBSN are called semantic trajectories. In the lit-
erature, there exist several research problems for tra-
jectory data. In this paper, we focus on the trajectory
classification.
The trajectory classification problem consists of
building a prediction model to classify a new trajec-
tory in a single-class or multi-class. The model is
trained and learns the patterns (or classes) from a his-
torical labeled trajectory (or sub-trajectory) data. Ba-
sic examples of trajectory classification are: (i) deter-
mining the transportation mode of the moving object
like car, bus, bike, taxi, airplane, and train; (ii) de-
termine what a user’s next stopping point like home,
school, cafe, office, and restaurant; (iii) identifying
who is the user of a trajectory (TUL problem).
In general, the trajectory classification problem
is challenging because of: (1) the massive volume
of trajectory data continuously generated by multi-
ple users; (2) the complexity associated with the data
representation (how can we represent latitude, lon-
gitude, and timestamp features in our models with-
out losing information?); (3) the sequence of spatio-
temporal points can be sparse, for instance, LBSNs
usually contain samples in days; (4) the nature of
multiple dimensions: as technologies advances, more
and more properties are linked to a trajectory, such as
664
A. de Freitas, N., Coelho da Silva, T., Fernandes de Macêdo, J., Melo Junior, L. and Cordeiro, M.
Using Deep Learning for Trajectory Classification.
DOI: 10.5220/0010227906640671
In Proceedings of the 13th International Conference on Agents and Artificial Intelligence (ICAART 2021) - Volume 2, pages 664-671
ISBN: 978-989-758-484-8
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
weather condition, POI category, adverse events, and
so on; and finally; (5) the number of the classes can be
much larger than the number of motion patterns (e.g.,
in TUL problem there may be more than one hundred
users).
The trajectory classification topic has been ex-
ploited for over a decade (Lee et al., 2008). In the
beginning, most of the works in the literature focus on
extracting features from GPS trajectories (e.g., veloc-
ity, distance) and use them as input to machine learn-
ing classifiers such as Random Forest and Multilayer
Perceptron (Patterson et al., 2003; Zheng et al., 2008).
These approaches are limited to extract the best fea-
tures from the spatio-temporal data and suffer from
the curse of dimensionality.
More recently, studies involve Deep Learning
models for Trajectory-User Linking (TUL) problem
as (Gao et al., 2017; Zhou et al., 2018, 2019), and
they aim at identifying and linking trajectories to their
generating-users. These studies involving two Deep
Learning models are limited because they cannot han-
dle multidimensional data, but only the spatial dimen-
sion. We believe this the major limitation, considering
that more properties have been linked to trajectories
over the years and can improve the model’s perfor-
mance.
In this work, we propose the DeepeST (Deep
Learning for Sub-Trajectory classification) model for
identifying the category from a large number of sub-
trajectories by jointly the embedding of many factors,
i.e., location, time, or any features associated with
a trajectory (or sub-trajectory). Our approach also
employs a Recurrent Neural Network (RNN), more
specifically, LSTM Schuster and Paliwal (1997) that
has been extensively used to process variable-length
input and can allow highly non-trivial long-distance
dependencies to be easily learned. We also apply the
Bi-directional LSTM (BLSTM) model to take into
account an effectively infinite amount of context on
both sides of a sub-trajectory position. The main rea-
son we use RNNs is the capacity of these networks to
learn complex patterns from a sequence, unlike feed-
forward neural network models.
In this paper, we tackle the trajectory classifica-
tion problem addressing two different classification
tasks because we would like to evaluate DeepeST
using GPS and LBSNs data: (1) a problem called
Trajectory-User Linking (TUL), where the classifica-
tion task is to link users to their sub-trajectories using
LBSNs trajectories. Correlating sub-trajectories with
users could help in identifying terrorists/criminals
from sparse spatio-temporal data (e.g., the transient
phone signals and check-ins) and is also helpful in
making better, more personalized recommendations
(Gao et al., 2017); (2) identify criminal patterns to
link criminal activities to GPS sub-trajectories inde-
pendent of the user’s trajectory. We trained DeepeST
with some categories, specified by the National De-
partment of Public Security, which are related to the
strategic POIs and the rules or specific constraints that
offenders need to follow, e.g − they need to charge
the ankle bracelet battery and to ensure the correct
functioning of the equipment that transmits his/her lo-
cation, that is, the signal that sends trajectory data to
the police department cannot be blocked; they need to
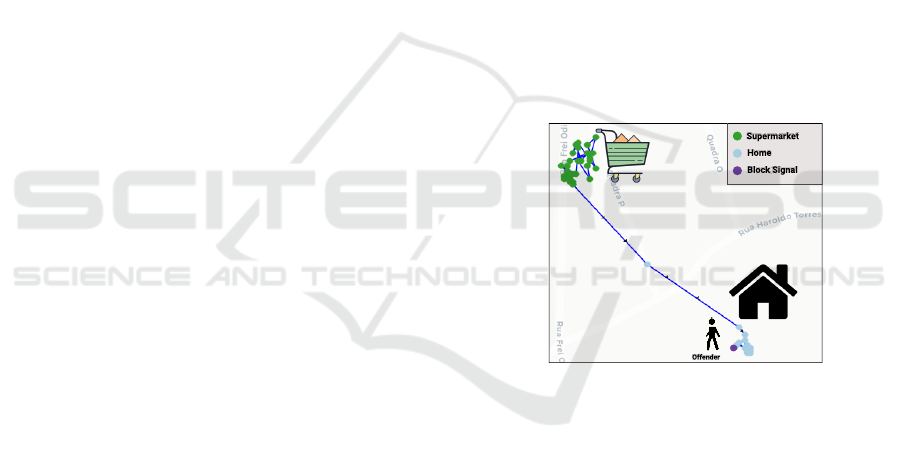
be at his/her home during the night. Figure 1 shows
an example of an offender’s sub-trajectories, where
the green, blue and purple points represent a sub-
trajectory link to a supermarket, its home and a block
signal, respectively. In this case, the signal block
was detected by the DeepeST based on the Spatio-
temporal pattern, where the same spatial coordinates
(latitude and longitude) are attributed to sequences of
sub-trajectories for a long time before a sub-trajectory
link to its home. In general, offenders prefer to block
the signal in their homes to avoid unsuspecting behav-
ior.
Figure 1: GPS Sub-trajectories classified by DeepeST.
The remainder of the paper is structured as follows:
Section 2 presents the related works and formally de-
fines the problem. Section 3 introduces our proposal.
Section 4 discusses the experimental evaluation. And
finally, Section 5 draws the final conclusions.
2 TRAJECTORY
CLASSIFICATION
In this paper, we tackle the trajectory classifica-
tion problem, which consists of classifying a sub-
trajectory into a label or class. We claim that we
classify sub-trajectories since our training set is de-
rived from the segmentation of trajectories as we ex-
plain later. For sake of brevity, hereinafter we will
use the term trajectory classification in place of sub-
Using Deep Learning for Trajectory Classification
665

trajectory classification. So, given a set of trajectories
and labels, we want to build a model for predicting
and assigning such labels to every sub-trajectory. The
labels are a set of category features, be the users are
the owner of the trajectory, the transportation modes
(car, bus, bike, walk), or criminal activities.
Trajectory classification is one of the widely stud-
ied problems on trajectory pattern mining over the
years. In the beginning, trajectory classification fo-
cused on detecting patterns of mobility from raw tra-
jectories. Most of the supervised learning approaches
classify trajectories or sub-trajectories into categories
that represent activities (as hiking and walking) or dif-
ferent transportation modes (like a car, bike, and bus)
(Zheng et al., 2008; Patterson et al., 2003; Fang et al.,
2016). One of the first methods for trajectory classi-
fication was TraClass, proposed by Lee et al. (2008)
that supports only the spatial dimension. Patel (2013)
extended the TraClass to support both the spatial and
the time dimensions. Basically, these works use ma-
chine learning methods demanding a feature extrac-
tion process to categorize raw trajectories or (sub-
trajectories) into different motion patterns consider-
ing features that are extracted from the spatial and
temporal dimensions like velocity, acceleration, and
distance.
More recently, studies have investigated Deep
Learning models to link trajectories to their generat-
ing users. TULER was the first model introduced in
(Gao et al., 2017) for identifying and linking a large
number of check-in trajectories to their generating-
users using RNN based models. More specifically,
TULER receives a sequence of POIs as input and rep-
resents this sequence in a new low-dimensional space
(an embedding vector) similar to word embedding in
natural language (Mikolov et al., 2013). Finally, the
trajectory was characterized via trained RNN mod-
els to link them to their users. TULVAE was pro-
posed in (Zhou et al., 2018) after the TULER and en-
hanced in (Zhou et al., 2019), a generative model to
mine human mobility patterns, which aims at learning
the implicit hierarchical structures of trajectories and
alleviating the data sparsity problem with the semi-
supervised learning. TULVAE achieved a significant
performance improvement for the TUL problem in
comparison to existing methods.
In summary, Machine learning methods can han-
dle trajectories, but they demand extraction features
process and suffers from the curse of dimension-
ality. On the other hand, Deep Learning models
as TULER and TULVAE minimize the sparse data
problem by representing the data in an embedding
vector but only support a sequence of POI identi-
fier. These approaches do not cope with other es-
sential features, commonly used to describe seman-
tic trajectories. Therefore, we propose the DeepeST
model for identifying the category from a large num-
ber of raw (sub)trajectory, semantic (sub)trajectories,
or any (sub)trajectory of other domains. DeepeST
also employs a Recurrent Neural Network (RNN),
both LSTM (Schuster and Paliwal, 1997) and Bi-
directional LSTM (BLSTM), which are designed to
recognize the sequential characteristics of data and
thereafter using the patterns to predict the future sce-
nario. Moreover, DeepeST is able to minimize the
computational complexity since it also operates on
the low-dimensional to learn the underlying category
from the sub-trajectory data. Finally, DeepeST is ca-
pable of handling raw trajectories (collected by GPS)
and semantic trajectories (generate from LBSNs) with
several features, since the model is capable of receiv-
ing sequences of attributes linked to a trajectory.
2.1 Preliminaries
In this section, we will introduce some necessary no-
tations and the basic terminology before we formally
present the problem formulation of the trajectory clas-
sification problem. Table 1 presents a list of com-
monly used notations.
Table 1: A list of commonly used notations.
Notation Description
A a finite sequence of attributes linked to a trajectory
l a location point
L = {l
1
, ...l
m
} a finite set of location indexes
T = {t
1
, ...t
w
} a finite set of time slot indexes
p
i
= (l
i
,t
i
, A
i
) a spatio-temporal position
T R
j
= [p
1
, ... p
len
j
] trajectory
S
j
= [p
q
1
, ... p
q
n
] a sub-trajectory
y a label of a sub-trajectory
Y = {y
1
, ...y
o
} a set of labels
˜
S = {S
1
, ...S
z
} A finite set of sub-trajectories
There are several concepts for trajectory. In this work,
we consider trajectory raw (from GPS tracking de-
vices, it is a consecutive sequence of spatial coordi-
nates ordered by time) and semantic trajectories (gen-
erated by LBSNs that collect information about vis-
ited places of their users as a consecutive sequence of
check-ins or stop episodes, for instance) in a single
definition, formalized as follows:
Trajectory: Let a trajectory T R
j
be a sequence of
points sorted in time [p
1
, .., p
len
j
]. Here, p
i
(1 ≤ i ≤
len
j
) is a tuple (l
i
,t
i
, A
i
), such that l
i
is a location point
at time t
i
, and A
i
= [a
1
, ..., a
m
] is a sequence of m at-
tributes linked to the trajectory (e.g velocity, acceler-
ation, geographic information, among others).
For sake of brevity, the location point l
i
is a spatial
coordinate e.g., latitude and longitude collected from
a GPS device, or l
i
can refer to check-in or stop lo-
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
666

cation (it can be a POI location, for instance). It is
worth to mention that if a trajectory is not linked to
any semantic information, then A
i
=
/
0.
For simplicity, in this work, we represent each lo-
cation l
i
composed of latitude and longitude from a
trajectory T R in a spatial grid cell, however it could be
in any well-defined geographical space. We also map
each timestamp t
i
to a time slot in T = {t
1
,t
2
, ..., t
w
},
such that T ∈ IR
w
. A time slot could be a regu-
lar time interval, for instance, some minutes, hours,
days or weeks. Finally, in order to reduce the com-
putational complexity and capture richer knowledge
of sub-trajectory patterns from trajectories, we seg-
ment the trajectories into sub-trajectories. There are
several methods for trajectory segmentation based on
the shape of a trajectory, time interval, and semantic
meanings (Zheng, 2015). Since trajectory segmen-
tation is not at the core part of this work, we adopt
the simplest method based on the time interval to
trajectories. A trajectory [p
q
1
, p
q
2
, ..., p
q
n
], such that
(1 ≤ q
1
< q
2
< ... < q
n
≤ len
j
, where l
k
= l
k−1
+1) is
called a sub-trajectory of S
j
. We are now ready to for-
mulate our classification problem for sub-trajectories.
2.2 Problem Statement
Given a set of sub-trajectories
˜
S = {S
1
, S
2
, ..., S
z
}, the
task is to classify the category by linking each sub-
trajectory S
i
∈
˜
S to a label y ∈ Y = {y
1
, ..., y
o
}.
Notice that our problem is generic, Y can be a set
of transportation mode {car, bus, bike, walk}, a set of
users that are the owner of the trajectory or any cate-
gory feature of other domains.
3 DeepeST: DEEP LEARNING
FOR SUB-TRAJECTORY
CLASSIFICATION
In this paper, we propose a deep learning model,
called DeepeST, to the trajectory classification prob-
lem. DeepeST receives as input a fit sequence of fea-
tures contain location, time, and any other attributes
annotated in a sub-trajectory.
3.1 DeepeST Architecture
DeepeST architecture is composed of embedding lay-
ers to each input, a concatenation layer, a recurrent
layer (LSTM or BLSTM), and a fully connected layer
with softmax as the activation function. The overview
of DeepeST is illustrated in Figure 2.
DeepeST incorporates embedding layers to re-
ceives sequences from the sub-trajectory. An embed-
ding is a relatively low-dimensional space into which
you can translate high-dimensional vectors. Embed-
dings make it easier to do machine learning on large
inputs like sparse vectors representing words. There
are two main reasons we use sub-trajectories embed-
ding: (1) Traditional methods, such as one-hot encod-
ing, are binary, usually sparse (mostly made of zeros),
and very high-dimensional (same dimensionality as
the number of distinct labels) (Chollet, 2018); (2) the
frequency of location in sub-trajectories can follow
a power-law distribution. In general, likewise, words
embedding in natural language (Mikolov et al., 2013).
Sub-trajectory embedding alleviates the curse of di-
mensionality and maintains the input data’s proximity
with similar patterns in a new dimensional space. For
instance, suppose a student user has visited the POI
sequence [Home, Bus Station, University], while an-
other user has visited the POI sequence [Home, Sub-
way, University]. Note that the embeddings of Bus
Station and Subway will be similar because they hap-
pened in the same context (after Home and before
University).
Deep learning models TULER and TULVAE ex-
plore only the spatial dimension to embedding vector.
In these works, we explore the spatial and temporal
dimensions and other different features linked to sub-
trajectories. The more important features we linked to
a sub-trajectory, more information to improve classi-
fication accuracy and can be used directly and hence
save more time.
We used a recurrent layer that receives input from
a feature vector, but DeepeST presents embedding
layers to each sub-trajectory attribute. So, a concate-
nation layer is defined between the embedding layers
and the recurrent layer to join embedding vectors in a
unique input features that will be used in the recurrent
layer, as shown in Figure 2.
The main reason we use a Recurrent Neural Net-
work (RNN) is the capacity of these networks to learn
complex patterns from a sequence, unlike feedfor-
ward neural networks. DeepeST employs a LSTM
(Hochreiter and Schmidhuber, 1997), which has been
extensively used to process variable-length input and
can allow highly non-trivial long-distance dependen-
cies to be easily learned. We also experimented Deep-
eST with the Bi-directional LSTM (BLSTM) model
(Schuster and Paliwal, 1997), which can take into ac-
count an effectively infinite amount of context on both
sides of a sub-trajectory and eliminates the problem
of limited context that applies to any feed-forward
model. Both LSTM and BLSTM operate at the lo-
cation, time, and all attribute embedding levels to
Using Deep Learning for Trajectory Classification
667

SoftmaxConcat
LSTM
or
BLSTM
y
o
y
2
DeepeST Model
y1
. . .
[S
1
,..., S
z
]
[l
1
, ..., l
n
]
[t
1
, ..., tn]
[a1
1
, ..., a1
n
]
[am
1
, ..., am
n
]
. . .
Embedding to am
. . .
Embedding to a1
Embedding Time
Embedding location
Si
Figure 2: DeepeST model to sub-trajectory classification.
learn the underlying pattern (or label) from the sub-
trajectory data.
The output of LSTM or BLSTM passes by the
softmax function, which converts the recurrent layer’s
result into the set of probabilities to be assigned to
each label. Softmax takes as input a vector of real
numbers and normalizes it into a probability distribu-
tion consisting of o probabilities (for each label) pro-
portional to the input numbers’ exponentials.
After applying softmax, we have probabilities for
each label y ∈ Y on the interval [0, 1].
3.2 Optimization in DeepeST
Overfitting is a major problem in RNN due to a large
number of weights and biases. To alleviate overfit-
ting, we determined a dropout layer for regulariza-
tion. Dropout is a strategy radically different from
other approaches, since it changes the network struc-
ture itself, instead of the cost function. Suppose we
have a training set X and the corresponding desired
output y. Normally, we train by direct propagation of
X across the network, and then the backpropagation
algorithm computes the error to the gradient. When
we use a layer dropout, this process is modified. We
eliminate by randomly (and temporarily) some of the
neurons hidden in the network, but leave the input and
output neurons untouched. Heuristically, if we aban-
don different sets of neurons, we are training with var-
ious neural networks. Therefore, dropout can reduce
overfitting, whereas other networks adapt in different
ways.
4 EXPERIMENTS
In this section, we present the experimental evalua-
tion to evaluate DeepeST in terms of quality predic-
tion. We start by providing details about the datasets,
the baseline algorithms, the evaluation metrics, fol-
lowed by the experimental evaluation. For repro-
ducibility purposes, we made the source code avail-
able on GitHub
1
.
4.1 Datasets
To evaluate the performance of DeepeST for the clas-
sification trajectory problem, we conduct our experi-
ments on three datasets: (1) a public dataset that con-
tains check-ins of users extracted from Brightkite
2
between April 2008 and October 2010. (2) a pub-
lic dataset that contains trajectories of check-in ex-
tracted from Gowalla
3
between February 2009 and
October 2010; finally, (3) a private dataset of of-
fender trajectories extracted from GPS services. To
validate the models, we split the three datasets into
training (70%), validation (15%), and test sets (15%).
We shuffle sub-trajectory data, run the baselines algo-
rithms ten times for each dataset, and compared the
models using Accuracy, Macro Precision, Macro Re-
call, and Macro F1-Score.
For Brightkite and Gowalla datasets the classifi-
cation task is to predict the corresponding user who
generated a given trajectory. We use a segmentation
based on time to created weekly sub-trajectories from
each user check-in. Notice that there are no overlap-
ping sub trajectories, there are weekly sub-trajectories
for each user (label). We also created a grid covering
all spatial points of trajectories with a cell of 30m
2
.
We selected only sub-trajectories of users who have
at least 15 weekly trajectories because we will have
at least two samples for each user in the validation set
and the test set. Finally, the Brightkite dataset con-
tains 4565 sub-trajectory samples to train, 996 to val-
idation, and 1085 to test. Gowalla dataset contains
2325 sub-trajectories sequences to train, 517 to vali-
dation, and 572 to test. Table 2 describes the attributes
of trajectory points to both Brightkite and Gowalla
datasets.
The Criminal dataset contains trajectories of of-
fenders in June 2019 that moved around Fortaleza,
1
https://github.com/nickssonarrais/ICAART2021
2
https://snap.stanford.edu/data/loc-Brightkite.html
3
https://snap.stanford.edu/data/loc-gowalla.html
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
668

Table 2: Description of the check-ins trajectories to
Brightkite and Gowalla.
Attributes Type Range/example N.
User Nominal {58186, ..., 58190} {197, 100}
Weekday Nominal {Monday, ..., Sunday} 7
Hour Numeric [0, 23] 24
Index grid Numeric {0, ..., 46458} {3742, 11345}
POI Nominal {dsda411, ..., ee8b8e} {4085,15977}
Subtraj ID Numeric {0, ..., 10000} {6646, 2335}
Ceara. The classification task is to identify crimi-
nal activities, as well as what the criminal is doing
- at home, blocking the signal from the equipment
that transmits his/her location, selling stolen car parts,
in a hearing with the judge, among other categories.
In this dataset, we randomly selected trajectories of
ninety offenders. To criminal activity dataset we used
a different segmentation based on time and label to
avoid overlapping sub trajectories. We created sub-
trajectories group each user and criminal activity for
up thirty minutes. In order words, for each offender
the algorithm returns sub-trajectories contains a sin-
gle criminal activity for up to thirty minutes. We
define a 2D grid content cells of 30m
2
for an area
around Fortaleza city. Table 3 describes the attributes
of trajectory points to the Criminal dataset. Finally,
the Criminal dataset contains 116255 sub-trajectories
sequences to train, 24912 to validation and 24912 to
test.
Table 3: Description of the GPS trajectories to the Criminal
Dataset.
Attributes Type Range/example N.
Offender Nominal {58186, ..., 58190} 90
Weekday Nominal {Monday, ..., Sunday} 7
Hour Numeric [0, 23] 24
Index grid Numeric {0, ..., 46458} 36690
Criminal Activity Nominal {home, ..., blocked signal} 9
Subtraj ID Numeric {0, ..., 10000} 166079
4.2 Baselines Algorithms
We compare DeepeST with four state-of-the-art ap-
proaches from the field of machine learning and deep
learning classification: XGBoost (Chen and Guestrin,
2016), Random Forest (Breiman, 2001), BITULER
(Gao et al., 2017), and TULVAE.
To find the optimal set of hyperparameters for
each model, we apply the grid-search technique to
combine several hyperparameters. For the Deep-
eST models (the one that uses LSTM, the one with
BLSTM), BITULER and TULVAE, we keep 64 as the
batch size and 0.001 as the learning rate and vary the
units (un) of the recurrent layer, the embedding size
to each attribute (es) and the dropout (dp). For TUL-
VAE, we also vary the latent variable (z). We deter-
mine an early stopping callback, that is a stop training
when, in our case, the accuracy has stopped improv-
ing. We set the early stopping as 20 for patience ar-
gument to minimize overfitting, i.e., the number of
epochs that produced the model’s accuracy with no
improvement after which training should be stopped.
For further details, we refer to Keras library
4
.
For the XGBoost model, we vary the number of
estimators (ne), the maximum depth of a tree (md),
the learning rate (lr), the gamma (gm), the fraction
of observations to be randomly samples for each tree
(ss), the sub sample ratio of columns when construct-
ing each tree (cst), the regularization parameters (l1)
and (l2). We also set the early stopping round to 20
for XGBoost.
For Random Forest, we vary the number of trees
(ne), the maximum number of features to consider
at every split (mf), the maximum number of levels
in a tree (md), the minimum number of samples re-
quired to split a node (mss), the minimum number of
samples required at each leaf node (msl), and finally,
the method of selecting samples for training each tree
(bs).
For more details about parameters, we shows refer
to Git Hub repository
5
.
4.3 Performance Comparison
There are two variations for DeepeST with respect
to the network layers: one with LSTM (DeepeST-
LSTM) and another one with BLSTM (DeepeST-
BLSTM). Our experiments tackle two main objec-
tives: evaluate individually the DeepeST models with
the state of art machine learning and deep learn-
ing models to the trajectory classification problem
from check-ins, as we experimented for Gowalla and
Brightkite datasets. And finally, evaluate individu-
ally Deepest variation and the machine learning ap-
proaches to GPS-based trajectories. The idea behind
is to measure how resilient DeepeST is to learn the
categories in comparison to the baselines.
Table 4 and 5 shows the best set of parameters
from the grid search, it also summarizes the perfor-
mance comparison between the variants of DeepeST,
XGBoost, RandomForest, BITULER and TULVAE
for the Brightkite dataset. The two best values are
highlighted in bold and the third one is shown as un-
derlined. For what concerns to DeepeST variations,
a sub-trajectory S is a sequence with each of the fol-
lowing attributes (ig
i
, hr
i
, poi
i
, wk
i
), where ig is the in-
dex grid cell and poi is the POI identifier, wk is the
weekday, and hr is the hour); BITULER and TUL-
VAE only deal with one feature, so the input is a se-
4
https://keras.io/
5
https://github.com/nickssonarrais/ICAART2021
Using Deep Learning for Trajectory Classification
669

quence of POI identifier as presented in Gao et al.
(2017); Zhou et al. (2019). For XGBoost and Ran-
domForest, a sub-trajectory is a unique concatenated
sequence [ig
1
, ig
2
, ..., wk
n−1
, wk
n
] with all attributes
(ig
i
, hr
i
, poi
i
, wk
i
).
From the results reported in Tables 4 and 5, we
can see that the embedding of four features com-
bined with RNN layers in sub-trajectory classification
yields accuracy improvements over the baselines. In
summary, in comparison with machine learning ap-
proaches, we can notice that DeepeST outperforms
XGBoost and Random Forest across all metrics by up
to 11% in Brightkite and by up 31% in Gowalla con-
sidering F1-Score. DeepeST takes advantage of the
LSTM/BLSTM and operates at embedding levels to
learn the underlying user categories from check-ins
sub-trajectory data. It is worth to mention that RNN
models (LSTM/BLSTM) are proper models to learn
from temporal sequences as sub-trajectories. We can
notice that DeepeST also outperforms BITULER and
TULVAE across all metrics by up to 5% in Brightkite
and by up 7% considering F1-score. This is because
DeepeST built a more representative model using a
set of variables instead of only using the points of
interest identification. As we can see, only POIs
identification are not sufficient to distinguish differ-
ent users. It is worth noting that the results could be
higher if there were more important features to sep-
arate the classes from different users in the dataset
(maybe features based on external events and weather
conditions). The expert’s view of the application do-
main can be essential to increase the performance of
the model. In this case, we applied only the spa-
tial and time features (weekday, hour, index grid,
and POI) extracted from the original Gowalla and
Brightkite datasets. DeepeST-LSTM only preserves
the past information because the only inputs it has
seen are from the past. DeepeST-BLSTM run your
inputs in two ways, one from past to future and one
from future to past. In our experiments, DeepeST-
BLSTM achieved slightly more significant results
than DeepeST-LSTM for Brightkite dataset since
DeepeST-BLSTM takes into account an effectively
infinite amount of context on both sides of a sub-
trajectory position and eliminates the problem of lim-
ited context that applies to any feed-forward model.
On the other hand, DeepeST-LSTM achieved slightly
more significant results than DeepeST-BLSTM for
Gowalla dataset. It is important to highlight that
the results between DeepeST-BLSTM and DeepeST-
LSTM are very close. However, using future informa-
tion can usually be easier and faster for the network
to understand the next label.
Table 6 shows the best set of parameters from
the grid search, it also summarizes the performance
comparison between the variants of DeepeST, XG-
Boost, RandomForest. It is important to mention that
BITULER and TULVAE were not included in the
experiments since they are applied from a sequence
of POI identifier (one-dimensional data) in check-ins
trajectories. To DeepeST variations, a sub-trajectory
S are sequence for each attribute in (ig
i
, hr
i
, wk
i
),
where ig is the Index grid, hr is the hour of day,
and wk is the weekday. For XGBoost and Ran-
domForest, a sub-trajectory is a unique concatenate
sequence [ig
1
, ig
2
, ..., wk
n−1
, wk
n
] with all attributes
(ig
i
, hr
i
, wk
i
). The two best values are highlighted in
bold and the third one is shown as underlined. We
can notice that DeepeST outperforms XGBoost and
Random Forest on all of the metrics by up 25% con-
sidering F1-macro. DeepeST again takes advantage
of the LSTM/BLSTM and operates at the location
and time embedding levels to learn the underlying
criminal categories from the offenders’ sub-trajectory
data. DeepeST-BLSTM achieved slightly more sig-
nificant results than DeepeST-BLSTM for the Crimi-
nal dataset.
5 CONCLUSION
In this paper, we investigate the trajectory classifi-
cation problem to classify a category from a set of
labels. A category can be anything, such as trans-
portation mode (car, bus, bike, walk), criminal activ-
ity (home, ..., blocked signal), or a user who is the
owner of the trajectory. We propose a new model,
called DeepeST (Deep Learning for Sub-Trajectory
classification), to identify any category from a large
number of sub-trajectories extracted from GPS ser-
vices or generate from LBSNs. DeepeST employs a
Recurrent Neural Network (RNN), both LSTM and
Bi-directional LSTM (BLSTM), which operate on the
low-dimensional to learn the underlying category. We
attacked two trajectory classification tasks and con-
ducted extensive experiments on three real datasets
to evaluate DeepeST performance with state-of-the-
art approaches from the field of machine learning
classification − XGBoost and Random Forest − and
Deep Learning − BITULER and TULVAE. DeepeST
achieves more expressive values of accuracy, preci-
sion, recall, and f1-score in all experiments. As future
directions, first, we aim at analyzing more features in
our models (as the risk facilities (Chainey and Rat-
cliffe, 2013) for criminal activities and weather fea-
tures to Gowalla and Brightkite datasets). Moreover,
to provide operational advantages, optimization, and
innovation, e.g − incorporate modules to trajectory
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
670

Table 4: Results to Brightkite.
Method Best set of the grid search
Accuracy Precision Recall F1-Score
mean std mean std mean std mean std
DeepeST-LSTM un:400, es:100, dp:0.5 0,9591 0,0018 0,9644 0,0048 0,9514 0,0025 0,9512 0,0033
DeepeST-BILSTM un:100, es:100, dp:0.5 0,9632 0,0030 0,9658 0,0038 0,9563 0,0044 0,9557 0,0041
BiTULER un:100, es:100, dp:0.5 0,9372 0,0052 0,9417 0,0055 0,9211 0,0068 0,9234 0,0066
TULVAE un:100, es:300, dp:0.5, z:300 0,9452 0,0044 0,9439 0,0062 0,9325 0,0048 0,9308 0,0054
Random Forest ne:200, md:30, mss:5, msl:1, mf:auto, bs:False 0,8717 0,0043 0,8744 0,0090 0,8431 0,0060 0,8440 0,0072
XGBoost ne:2000, md:5, gm:0, ss:0.8, cst:0.5, l1:1, l2:100 0,8769 0,0047 0,8717 0,0059 0,8481 0,0063 0,8483 0,0065
Table 5: Results to Gowalla.
Method Best set of the grid search
Accuracy Precision Recall F1-Score
mean std mean std mean std mean std
DeepeST-LSTM un:100, es:400, dp:0.5 0,9760 0,0039 0,9821 0,0027 0,9744 0,0042 0,9750 0,0039
DeepeST-BILSTM un:200, es:100, dp:0.5 0,9739 0,0038 0,9798 0,0034 0,9727 0,0040 0,9723 0,0044
BiTULER un:300, es:400, dp:0.5 0,9122 0,0050 0,9274 0,0070 0,9101 0,0060 0,9078 0,0072
TULVAE un:100, es:300, dp:0.5, z:300 0,9159 0,0085 0,9338 0,0121 0,9111 0,0096 0,9105 0,0109
Random Forest ne:400, md:30, mss:2, msl:2, mf:sqrt, bs:False 0,7047 0,0088 0,7020 0,0139 0,6841 0,0093 0,6631 0,0109
XGBoost ne:2000, md:10, gm:0, ss:0.8, cst:0.5, l1:1, l2:100 0,6545 0,0112 0,6393 0,0197 0,6327 0,0134 0,6143 0,0152
Table 6: Results to Criminal Dataset.
Method Best set of the grid search
Accuracy Precision Recall F1-Score
mean std mean std mean std mean std
DeepeST-LSTM un:100, es:400, dp:0.5 0,9188 0,0010 0,8792 0,0075 0,8283 0,0043 0,8504 0,0040
DeepeST-BILSTM un:200, es:100, dp:0.5 0,9203 0,0013 0,8826 0,0071 0,8365 0,0052 0,8564 0,0026
Random Forest ne:400, md:30, mss:2, msl:2, mf:sqrt, bs:False 0,7917 0,0002 0,6806 0,0017 0,5515 0,0010 0,5910 0,0012
XGBoost ne:2000, md:10, gm:0, ss:0.8, cst:0.5, l1:1, l2:100 0,8121 0,0008 0,6671 0,0017 0,5765 0,0015 0,6084 0,0011
preprocessing and features creation. Finally, we aim
at studying how to improve accuracy by means of
other deep learning techniques, like attention mech-
anisms.
REFERENCES
Breiman, L. (2001). Random forests. Machine Learning,
45(1):5–32.
Chainey, S. and Ratcliffe, J. (2013). GIS and crime map-
ping. John Wiley & Sons.
Chen, T. and Guestrin, C. (2016). Xgboost: A scalable tree
boosting system. In Proceedings of the ACM SIGKDD
International Conference on Knowledge Discovery
and Data Mining, volume 13-17-Augu, pages 785–
794.
Chollet, F. (2018). Deep Learning mit Python und Keras:
Das Praxis-Handbuch vom Entwickler der Keras-
Bibliothek. MITP-Verlags GmbH & Co. KG.
Fang, S.-H., Liao, H.-H., Fei, Y.-X., Chen, K.-H., Huang,
J.-W., Lu, Y.-D., and Tsao, Y. (2016). Transportation
modes classification using sensors on smartphones.
Sensors, 16(8):1324.
Gao, Q., Zhou, F., Zhang, K., Trajcevski, G., Luo, X., and
Zhang, F. (2017). Identifying human mobility via
trajectory embeddings. In IJCAI, volume 17, pages
1689–1695.
Hochreiter, S. and Schmidhuber, J. (1997). Long Short-
Term Memory. Neural Computation, 9(8):1735–1780.
Lee, J.-G., Han, J., Li, X., and Gonzalez, H. (2008).
Traclass: trajectory classification using hierarchical
region-based and trajectory-based clustering. Pro-
ceedings of the VLDB Endowment, 1(1):1081–1094.
Mikolov, T., Chen, K., Corrado, G., and Dean, J. (2013).
Efficient estimation of word representations in vector
space. arXiv preprint arXiv:1301.3781.
Patel, D. (2013). Incorporating duration and region associ-
ation information in trajectory classification. Journal
of Location Based Services, 7(4):246–271.
Patterson, D. J., Liao, L., Fox, D., and Kautz, H. (2003). In-
ferring high-level behavior from low-level sensors. In
International Conference on Ubiquitous Computing,
pages 73–89. Springer.
Schuster, M. and Paliwal, K. K. (1997). Bidirectional re-
current neural networks. IEEE Transactions on Signal
Processing, 45(11):2673–2681.
Zheng, Y. (2015). Trajectory Data Mining. ACM Transac-
tions on Intelligent Systems and Technology, 6(3):1–
41.
Zheng, Y., Liu, L., Wang, L., and Xie, X. (2008). Learning
transportation mode from raw gps data for geographic
applications on the web. In Proceedings of the 17th
international conference on World Wide Web, pages
247–256. ACM.
Zhou, F., Gao, Q., Trajcevski, G., Zhang, K., Zhong, T., and
Zhang, F. (2018). Trajectory-user linking via varia-
tional autoencoder. In IJCAI, pages 3212–3218.
Zhou, F., Yin, R., Trajcevski, G., Zhang, K., Wu, J., and
Khokhar, A. (2019). Improving human mobility iden-
tification with trajectory augmentation. pages 1–31.
Springer.
Using Deep Learning for Trajectory Classification
671
