
Network Topology Identification using Supervised Pattern Recognition
Neural Networks
Aniruddha Perumalla
a
, Ahmet Taha Koru
b
and Eric Norman Johnson
Department of Aerospace Engineering, Pennsylvania State University, University Park, PA, U.S.A.
Keywords:
Multi-Agent Systems, Neural Networks, Topology Identification, Machine Learning, Counterintelligence,
Countersurveillance, Autonomous Systems, Graph Theory, Linear Consensus, Pattern Recognition,
Supervised Learning.
Abstract:
This paper studies the network topology identification of multi-agent systems with single-integrator dynamics
using supervised pattern recognition networks. We split the problem into two classes: (i) small-scale systems,
and (ii) large-scale systems. In the small-scale case, we generate all connected (undirected) graphs. A finite
family of vectors represent all possible initial conditions by gridding the interval 0 and 1 for each agent.
The system responses for all graphs with all initial conditions are the training data for the supervised pattern
recognition neural network. This network is successful in identification of the most connected node in up
to nearly 99% of cases involving small-scale systems. We present the accuracy of the trained network for
network topology identification with respect to grid space. Then, an algorithm predicated on the pattern
recognition network, which is trained for a small-scale system, identifies the most connected node in large-
scale systems. Monte Carlo simulations estimate the accuracy of the algorithm. We also present the results for
these simulations, which demonstrate that the algorithm succeeds in finding the most connected node in more
than 60% of the test cases.
1 INTRODUCTION
The theoretical advances in cooperative control of
multi-agent systems lead swarm systems to take place
in engineering applications. Autonomous transporta-
tion (Teodorovic, 2003), complex power networks
(Bidram et al., 2014), water distribution (de Roo et al.,
2015), multi-robot systems (Ota, 2006), and modern
warfare (Scharre, 2018) are among the examples. In-
telligent group behaviors emerge from the swarming
of a group of individuals with poor abilities (Tan and
Zheng, 2013). Therefore, swarming fulfills the de-
mand to accomplish complex tasks.
The agents of a swarm share their sensor measure-
ments through a communication network to cooper-
ate. However, the network topology is not directly
available in some applications, for instance the in-
teractions between brain neurons (Vald
´
es-Sosa et al.,
2005) and gene regulatory networks in biological sys-
tems (Julius et al., 2009). Another interesting exam-
ple is the case of counter-swarm systems. Such a sys-
a
https://orcid.org/0000-0002-2618-7032
b
https://orcid.org/0000-0001-8191-2324
tem may require the knowledge of the opponent net-
work topology to efficiently neutralize.
Although it is a system identification application;
yet, conventional methods may fail to identify some
network topologies (see the discussion in subsection
2.3). Consequently, the network topology identifica-
tion studies draw attention of researchers. The authors
of (Gonc¸alves and Warnick, 2008) study the network
topology identification of linear time-invariant sys-
tems. A node-knockout procedure identify the topol-
ogy in consensus-type network (Nabi-Abdolyousefi
and Mesbahi, 2012). Reference (Rahimian et al.,
2013) discusses the identifiability of links and nodes
of multi-agent systems under the agreement proto-
col. Stochastic perturbations recover the underlying
topologies of noise-contaminated complex dynamical
networks (Wu et al., 2015). The authors of (Sun and
Dai, 2015) reformulate the network topology iden-
tification problem as a quadratic optimization prob-
lem. The constrained Lyapunov equations establish
network reconstruction algorithms (van Waarde et al.,
2019).
In this paper, we utilize neural networks to iden-
tify an unknown network topology. We consider the
258
Perumalla, A., Koru, A. and Johnson, E.
Network Topology Identification using Supervised Pattern Recognition Neural Networks.
DOI: 10.5220/0010231902580264
In Proceedings of the 13th International Conference on Agents and Artificial Intelligence (ICAART 2021) - Volume 1, pages 258-264
ISBN: 978-989-758-484-8
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
single-integrator dynamics with a consensus protocol
over a fixed connected (undirected) graph. We split
the problem into two: (i) identification of the entire
graph for small-scale systems, and (ii) identification
of the most connected node for large-scale systems.
For problem (i), we trained a pattern recognition neu-
ral network to identify the topology of a four-node
network using simulated data of the observed state
of the network over a small period of time. We pro-
pose an algorithm predicated on the neural networks
trained in a small-scale setup to reveal the most con-
nected node(s) in a large-scale system.
1.1 Motivation
Countersurveillance is the primary motivator of this
algorithm. If one wishes to attack an opponent swarm
of vehicles, knowledge of the swarm’s network topol-
ogy may significantly increase the efficiency and ef-
fectiveness of one’s attack. For instance, if it is known
that the topology of the swarm adheres to a spoked-
hub or star/“leader-follower” network structure (visu-
alized in Figure 1, with node 10 being the leader),
focusing the attack on the leader of the swarm may
be sufficient to incapacitate the swarm. In general,
knowledge of the opponent network topology allows
a valuable additional basis on which countersurveil-
lance measures may weigh the importance of specific
members of the opponent system and thereafter dis-
tribute their resources more effectively.
10
1
2
3
4
5
6
7
8
9
Figure 1: An example leader-follower network topology.
2 PRELIMINARIES
2.1 Notation
The notation of this paper is standard. Specifically,
R, R
n
, R
n×m
, Z
++
respectively stand for the sets of
all real numbers, n-dimensional real column vectors,
n×m real matrices, and positive integers. The symbol
“,” denotes equality by definition. We also write I
n
for the n×n identity matrix, 0
n×m
for the n×m matrix
with zero entries, 1
n
for the n × 1 vector of all ones,
⊗ for Kronecker product. The symbol P (X) denotes
the power set and |X| denotes cardinality of a set X.
2.2 Graph Theory
Consider a fixed (i.e. time-invariant) directed or undi-
rected graph (representing network topology) G =
{V ,E}, where V = {v
1
,v
2
,..., v
N
} is a non-empty
finite set of N nodes and E ⊆ V × V is a set of edges.
There is an edge rooted at node v
j
and ended at v
i
(i.e. (v
j
,v
i
) ∈ E) if and only if v
i
receives informa-
tion from v
j
. A(G) = [a
i j
] ∈ {0,1}
N×N
denotes the
adjacency matrix. We only consider boolean graphs;
that is, a
i j
= 1 ⇔ (v
j
,v
i
) ∈ E and a
i j
= 0 otherwise.
Furthermore, repeated edges and self-loops are not al-
lowed; that is, a
ii
= 0, ∀i ∈ I
N
. If (v
i
,v
j
) ∈ E, then
the nodes i and j are neighbours. The set of neigh-
bors of node v
i
is denoted as N
i
= { j | (v
j
,v
i
) ∈ E}.
A graph with the property that a
i j
= a
ji
is undirected.
The in-degree matrix is defined by D(G) = diag(d
i
)
with d
i
=
∑
j∈N
i
a
i j
. A directed path from node v
i
to
node v
j
is a sequence of successive edges in the form
{(v
i
,v
p
),(v
p
,v
q
),.. ., (v
r
,v
j
)}. The Laplacian of the
graph G is defined as L(G) = D(G) − A(G). A con-
nected graph is an undirected graph which has at least
one vertex and between every pair of vertices of which
there is a path.
2.3 Agreement Protocol
Consider the consensus problem of a group of N
agents over a fixed connected network topology G
with the single-integrator dynamics given by
˙x
i
(t) = u
i
(t), x
i
(0) = x
i0
, t ≥ 0, (1)
where x
i
(t) ∈ R is the state, and u
i
(t) ∈ R is the input
for each agent i ∈ {1,..., N}. The local control proto-
col for each agent i is given by
u
i
(t) =
∑
j∈N
i
a
i j
(x
j
− x
i
). (2)
We represent the overall closed-loop system in the
compact form as
˙x(t) = −L(G)x(t) (3)
where x(t) , [x
1
(t),...,x
N
(t)]
T
. The solution of (3)
is
x(t) = e
−L(G)t
x(0). (4)
The local voting protocol in (2) guarantees consensus
of the single-integrator dynamics in (1) if and only
if G has a spanning tree (see Theorem 2.2 in (Lewis
Network Topology Identification using Supervised Pattern Recognition Neural Networks
259

1 2
3
Figure 2: The system in (4) is not identifiable from x(0) for
this network topology.
et al., 2014)). It is well-known that each finite con-
nected graph has at least one spanning tree.
This paper studies the identification of L(G) from
a single solution x(t). This identification reveals the
underlying network topology G. However, conven-
tional methods may fail to identify L(G) from (4). A
Laplacian matrix L(G) is identifiable with (3) from
x(0) if and only if the matrix given by
R(G) ,
I − L(G) (−L(G))
2
... (−L(G))
N−1
x(0) (5)
is full rank for all L(G) in an open set (see Theorem
2.5 in (Stanhope et al., 2014)). Consider any initial
condition x(0) = [x
10
, x
20
, x
30
]
T
∈ R
3
and the net-
work topology G
1
seen in Figure 2 where
L(G
1
) =
2 −1 −1
−1 2 −1
−1 −1 2
(6)
For this particular network topology,
R(G
1
) =
x
10
x
20
− 2x
10
+ x
30
6x
10
− 3x
20
− 3x
30
x
20
x
10
− 2x
20
+ x
3
6x
20
− 3x
10
− 3x
30
x
30
x
10
+ x
20
− 2x
30
6x
30
− 3x
20
− 3x
10
(7)
and rank(R(G
1
)) = 2. The system in (3) with L(G
1
)
faces collinearity problems in least squares estimation
for any initial condition x(0) ∈ R
3
.
To overcome this, we train a supervised pat-
tern recognition neural network to identify a network
topology. Thus, we avoid identifying L in R
N×N
. In-
stead, the trained neural network distinguishes L(G)
in the set of all possible N−dimensional communica-
tion network topologies.
3 SMALL-SCALE SYSTEMS
We define systems with less than or equal to five
nodes (i.e., N ≤ 5) as small-scale systems. The rea-
son is that the number of connected undirected graphs
grows dramatically as N increases
1
. Due to limita-
tions in training data memory and network training
time brought on by this dramatic increase, efficient
1
The integer sequence A001187 in the On-Line En-
cyclopedia of Integer Sequences presents the number of
connected undirected graphs (i.e., the length of G
N
list
) for
N ∈ {0,1,2,...}.
X
p,q
Y
p,q
L(G)
Hidden
layer
Input:
Observed
Dynamics
Output:
Graph
Pattern
Identifier
Identified
Graph
Figure 3: Illustration of the proposed pattern recognition
network for small-scale system network topology identifi-
cation.
training is not manageable when N > 5. Although it is
possible for the network training dataset to be expan-
sive enough to cover at most 728 such graphs when
N ≤ 5 (e.g., our training dataset for a 4-node system
occupied roughly 20 MB), it is expensive in terms of
both memory and training time to construct a train-
ing dataset that sufficiently captures the dynamics of
cases involving all such graphs when N = 6 (26 704),
N = 7 (1 866 256), or greater.
The purpose of the neural network is to identify
the graph G, which is illustrated in Fig 3. Thus, x(t)
is the input and G is the output of the neural network
system. We train the neural network with solutions in
(4) covering as many as possible scenarios. To this
end, we use all of the connected undirected graphs
with degree N. Instead of considering all R
N
, we fo-
cus on [0,1]
N
to get samples from all possible initial
conditions x(0). Any solution in (4) can be scaled and
translated such that x(0) ∈ [0,1]
N
. We present the de-
tails throughout this section.
3.1 The Training Data Set
3.1.1 Generating All Connected Undirected
Graphs
For N number of nodes, there are
(
N
2
)
many possi-
ble undirected graphs; we generate all of them. An
undirected graph is connected if and only if the rank
of the corresponding Laplacian matrix is N − 1 (see
Remark 4 in (Olfati-Saber and Murray, 2004)). Us-
ing this theorem, we choose the connected undirected
graphs with degree N among all of the possible graphs
with degree N and store them in a set G
N
list
.
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
260

3.1.2 Generating Initial Conditions
The set x
samples
, {k/K | k ∈ {0, .. .,K}, K ∈ Z
++
}
contains real numbers 0, 1/K, 2/K,. .. , 1 where 1/K
represents the grid spacing. We generate initial con-
ditions x(0) using the elements in x
samples
such that
x
10
= 0, x
N0
= 1, x
i0
∈ x
samples
, and
x
10
≤ x
20
≤ ·· · ≤ x
N0
. (8)
For instance, [0, 0,1]
T
, [0,0.5,1]
T
, and [0,1, 1]
T
are
the initial conditions for N = 3 and K = 2. We store
the initial conditions in a set x
0,list
.
Note that any initial condition x(0) ∈ R
N
is con-
sistent with (8) after proper relabeling of the nodes.
Therefore, this method avoids the redundant solutions
and decreases the memory requirements.
3.1.3 Generating the Training Dataset
Let ∆t > 0 be the chosen sampling period (timestep
length), n
s
be the number of samples. The product of
n
s
and ∆t forms the total duration of the simulated dy-
namics. Let also e
N
p
be the N-dimensional vector of all
zeros except its p
th
entry. e
N
p
serves as an “identifier”
for the p
th
graph. For all G
p
∈ G
list
and x
q
∈ x
0,list
, the
inputs
X
p,q
,
h
x
q
, e
−L(G
p
)∆t
x
q
,..., e
−L(G
p
)n
s
∆t
x
q
i
(9)
and the outputs Y
p,q
, e
N
p
construct the training
data set D = {(X
p,q
,Y
p,q
) | p = 1,.. ., |G
N
list
|, q =
1,..., |x
0,list
|}. We trained the supervised pattern
recognition neural networks using all input-output
data in D using MATLAB.
3.2 Validation
We train the network with the initial condition sam-
ples which belong to set [0, 1]
N
. However, the initial
condition belongs to R
N
in general. The following
lemma is useful to scale and translate any solution (4)
to modify its initial condition to be consistent with
training data.
Lemma 1. For any graph G, x(t) = e
−L(G)t
x(0)
if and only if S(x(t)+ T 1
N
) = e
−L(G)t
S(x(0) + T 1
N
)
where S 6= 0 and S, T ∈ R.
Proof. The matrix exponential is the power series as
e
−L(G)t
= I +
∞
∑
k=1
−L
k
(G)t
k
k!
(10)
by definition. As per graph theory, L(G)1
N
= 0
since 1
N
is the right eigenvector corresponding to the
eigenvalue 0 of L(G) (Lewis et al., 2014). Thus,
e
−L(G)t
1
N
= 1
N
from (10). The rest of the proof is
algebraic manipulations.
Consider that we observe the outputs ¯x
i
(t) of a
multi-agent system with an underlying communica-
tion topology G
1
. We assume ¯x
1
(0) ≤ ·· · ≤ ¯x
N
(0)
without loss of generality. Otherwise, we can relabel
the nodes to satisfy this constraint. Let the observa-
tion matrix be
¯
X = [ ¯x(0), ¯x(∆t),. .. , ¯x(n
s
∆t)], (11)
S = max
i
¯x
i
(0) − min
i
¯x
i
(0), and T = −min
i
¯x
i
(0).
Note that x(0) ∈ [0,1]
N
where x(t) = S(¯x(t) + T 1
N
).
Thus, X = S(
¯
X + T (1
N
⊗ 1
n
s
)) is an appropriate ob-
servation matrix to identify G
1
using trained pattern
recognition network. The underlying graph is same
for both X and
¯
X from Lemma 1. Thus, the output of
the pattern recognition neural network is L(G
1
).
4 LARGE-SCALE SYSTEMS
We define systems with more than five nodes, N > 5,
as large-scale systems. In this case, we present an al-
gorithm to detect the most connected node (“primary”
node) of a communication network topology. To this
end, we use a pattern recognition network which is
trained for a small-scale system.
4.1 Determining the Most-connected
Node of Large-scale Systems
Consider the outputs
b
x
i
(t) of a large-scale multi-agent
system. The following algorithm aims to reveal the
most connected node of its communication network
topology.
Step 0: This step contains offline training and com-
putations which are performed once and stored.
Step 0.1: Set K > 0 and 3 ≤ N
c
≤ 5. Generate all con-
nected undirected graphs G
N
c
list
, generate initial condi-
tion samples list x
0,list
with N
c
and K, and generate the
data set D (see Section 3). Train the pattern recogni-
tion network using D.
Step 0.2: Let I
N
, {1, 2,. ..,N}. Compute all N
c
combinations of I
N
, C = {C
r
∈ P (I
N
) | |C
r
| = N
c
}.
Step 1: Set the number of links α
i
= 0, i = 1,. .. ,N.
Step 2: Iterate for all C
r
∈ C where r = 1, .. ., |C|.
Step 2.1: Let
¯
C
r
, I
N
\ C
r
, and x
c
(t) ,
∑
i∈
¯
C
r
b
x
i
(t).
Compute ¯x
i
(t) , (N
c
b
x
i
(t) + x
c
(t))/N, i ∈ C
r
.
Network Topology Identification using Supervised Pattern Recognition Neural Networks
261

Step 2.2: Consider the observation of ¯x
i
(t) from a
small-scale system with degree N
c
. Construct the ob-
servation matrix X by reordering, scaling and trans-
lating the set of ¯x
i
(t) (see Subsection 3.2).
Step 2.3: Identify L(G) using the trained pattern
recognition network. Increment the corresponding
number of links α
i
using L(G).
Step 3: The most connected node is the one owning
the largest number of links arg max
i
α
i
.
5 RESULTS
Some aspects of our testing procedure remained the
same for both small-scale and large-scale systems.
Training of the pattern recognition neural network in
each case was done through the patternnet function
in MATLAB’s Deep Learning toolbox (The Math-
Works, Inc., 2019), with a single hidden layer and
otherwise default arguments. The size of this hidden
layer was varied from 5 to 75 to view its effect on ac-
curacy of the small-scale systems, but was set to 50
for the large-scale systems. In the small-scale system,
in which generation of all possible graphs G
3
list
for
training and testing purposes was possible due to its
small length
2
, population of G
3
list
was done ourselves.
In the large-scale system application for N ∈ {7,8,9},
the training with graphs from G
4
list
was accomplished
similarly. However, generation of G
N
list
for large-scale
systems imposes a high computational load and there-
fore requires a long duration. We avoid this require-
ment by rather drawing a small random sample G
N
n
of
size n from G
N
list
for the testing of the large-scale sys-
tems. For this sampling, we utilize nauty (McKay
and Piperno, 2013), a tool that can quickly gener-
ate graphs; in particular, we make use of nauty’s
genrang program.
5.1 Small-scale Systems
Several pattern-recognition networks were trained to
predict the exact network topology of the small-scale
systems. We varied the size of the training dataset
by manipulating K, since K influences the length of
x
0,list
, which corresponds to the number of initial con-
ditions generated. As K increases, the number of
combinations of initial conditions and graphs used to
generate the training data grows. In addition, as pre-
viously mentioned, we varied the size of the hidden
layer to check its impact on the accuracy of the pre-
dictions. We tested the trained pattern recognition
2
See the aforementioned A001187.
network using a dataset assembled similarly to the
training data, but whose initial conditions were not
restricted to the “sample” space x
sample
. The results
of the testing for each combination of K and hidden
layer size are presented in Table 1.
Table 1: Identification accuracy for G
3
with respect to var-
ious K and size of the hidden layer.
Size of the Hidden Layer
5 25 50 75
K
5 31.08% 65.59% 78.96% 95.05%
10 61.36% 98.26% 96.78% 94.31%
15 97.53% 98.76% 98.51% 97.03%
20 97.61% 98.76% 97.05$ 99.19%
The network becomes more accurate as the number
of initial conditions used for training grows; we ex-
pect this trend, as the discrepancy of the network’s
initial condition space decreases with increasing K.
A similar trend is observed for the increase in hidden
layer size. However, it is appropriate to be wary of
the tradeoff between high network accuracy and both
overfitting as the size of the hidden layer grows and
higher memory requirements as K grows.
As an aside, it should be noted again that the dis-
tinction between small-scale and large-scale systems
is largely motivated by neural network training time.
As an example: a network trained for a 4-node system
with K = 10 and 5 hidden layers required just 52 sec-
onds for training, whereas a network trained with the
same configuration for a 5-node system required 172
minutes for training, so the increase in training time
is quite significant.
5.2 Large-scale Systems
Using the process put forth in Section 3.2, we trained
a pattern-recognition network using initial condition
samples belonging to [0,1]
4
(i.e., data from a 4-node
small-scale system). Thereafter, through the follow-
ing method we generated a testing dataset through
which this small-scale-trained network was used to
predict the primary and secondary nodes of a system
with N = 7. A set of five initial conditions x
5
for
N = 7 was first generated using the method outlined in
Section 3. A subset G
7
n
of size n was drawn from G
7
list
through nauty. For every combination (i, j) of initial
condition x
i
,i ∈ {1, ...,5} and graph G
j
n
, j ∈ {1,...,n},
the test inputs X were generated through Equation
9. The algorithm described in Section 4.1 was then
used to identify the most connected (primary), as well
as the second-most-connected (secondary), nodes for
each combination (i, j) making up the test dataset.
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
262
The primary “success” of the algorithm for a given
graph sample size n was defined as the percentage of
correct primary node identification across all combi-
nations (i, j); the secondary success was defined simi-
larly. This entire testing process was repeated 3 times
for each sample size n ∈ {10, 20,..., 250} and the av-
erage success was taken to be the mean of the primary
success over the 3 repetitions for each sample size.
10
40
70
100
130
160
190
220
250
280
310
340
370
400
10
20
30
40
50
60
70
80
Number of Graphs Sampled
Mean Success (%)
Mean Success of 4-Node Trained Network for
Prediction of Primary and Secondary Nodes
of 7-Node Graph
Primary Node
Secondary Node
Figure 4: Results of testing a pattern-recognition network
trained on data from a small-scale (4-node) system on large-
scale (7-node) data.
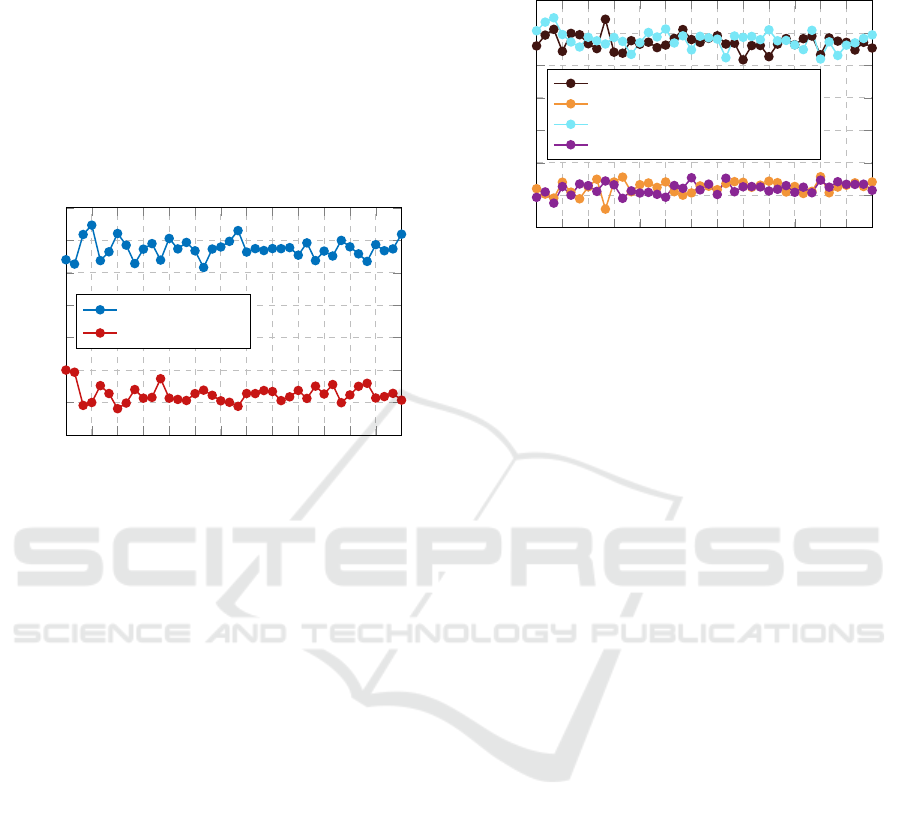
Figure 4 displays the results of the large-scale testing
for N = 7 as the testing dataset grows in size propor-
tionally to n, the number of samples from G
7
list
. The
network trained on small-scale data is successful in
identification of the primary node in roughly 65% of
cases; in addition, it is successful in identification of
the secondary node in roughly 25% of the cases.
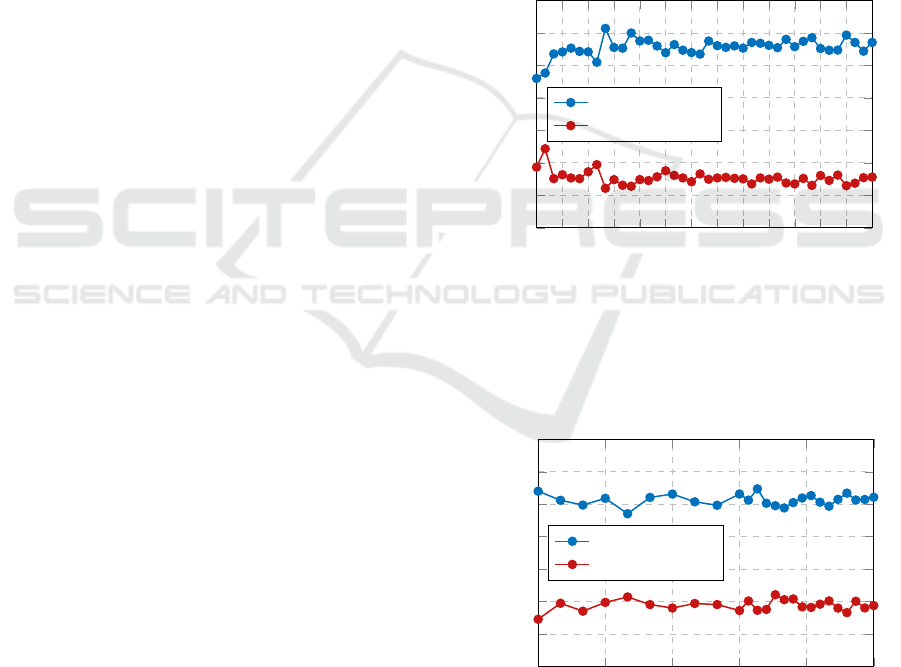
The same process was also used to test the small-
scale network for primary/secondary node prediction
of large-scale systems of size N ∈ {8, 9}. We include
the visualizations of those results (Figs. 6 and 7),
which yielded similar results to the 7-node test case,
in the appendix.
We also repeated the large-scale testing for the 7-
node configuration with noise in the single-integrator
consensus dynamics included to test the robustness of
our method to uncertainty. Whereas the original con-
figuration assumed “perfect” observation of agent dy-
namics, white Gaussian noise models the uncertainty
in the observations of the positions of each agent,
which would be present in a real countersurveillance
scenario. The results of the simulation including
white Gaussian noise with variances 0.1 and 0.25 in
observations of each agent are displayed in Figure 5.
Comparison to Figure 4 indicates that our method is
generally robust to this uncertainty, as the accuracy
10
40
70
100
130
160
190
220
250
280
310
340
370
400
10
20
30
40
50
60
70
80
Number of Graphs Sampled
Mean Success (%)
Mean Success of 4-Node Trained Network for
Prediction of Primary and Secondary Nodes
of 7-Node Graph (incl. White Gaussian Noise)
Primary Node (Noise Variance 0.10)
Secondary Node (Noise Variance 0.10)
Primary Node (Noise Variance 0.25)
Secondary Node (Noise Variance 0.25)
Figure 5: Results of testing a pattern-recognition network
trained on data from a small-scale (4-node) system on large-
scale (7-node) data, including white Gaussian noise with
variances 0.1 and 0.25 in the single-integrator consensus
dynamics.
in identification of the primary and secondary nodes
does not change significantly for either uncertainty
variance examined.
We approximate the convergence of our method
via these simulations. Based on the results of the
Monte Carlo simulations for N ∈ 7,8,9 sampling up
to 400 graphs from the pools, our method is gener-
ally successful in identification of the most connected
node in at least 60% of cases for large-scale (N > 5)
systems, even in the presence of uncertainty modelled
as white Gaussian noise. It is also generally suc-
cessful in identification of the second-most connected
node in at least 20% of cases.
6 CONCLUSIONS
We found that using our method, the pattern-
recognition network was highly accurate in predicting
the network topology of small-scale systems. Further-
more, such a pattern-recognition network was suc-
cessful in recognizing the most connected nodes of
large-scale systems. Future work may focus on train-
ing the network to recognize network topologies of
systems with different closed-loop dynamics apart
from that of the linear consensus protocol.
Network Topology Identification using Supervised Pattern Recognition Neural Networks
263
REFERENCES
Bidram, A., Lewis, F. L., and Davoudi, A. (2014). Dis-
tributed control systems for small-scale power net-
works: Using multiagent cooperative control theory.
IEEE Control Systems Magazine, 34(6):56–77.
de Roo, F. V., Tejada, A., van Waarde, H., and Trentelman,
H. L. (2015). Towards observer-based fault detection
and isolation for branched water distribution networks
without cycles. In 2015 European Control Conference
(ECC), pages 3280–3285. IEEE.
Gonc¸alves, J. and Warnick, S. (2008). Necessary and suf-
ficient conditions for dynamical structure reconstruc-
tion of lti networks. IEEE Transactions on Automatic
Control, 53(7):1670–1674.
Julius, A., Zavlanos, M., Boyd, S., and Pappas, G. J. (2009).
Genetic network identification using convex program-
ming. IET systems biology, 3(3):155–166.
Lewis, F. L., Zhang, H., Hengster-Movric, K., and Das, A.
(2014). Cooperative control of multi-agent systems:
Optimal and adaptive design approaches. Springer-
Verlag, London, England.
McKay, B. D. and Piperno, A. (2013). Nauty and traces
user’s guide (version 2.5). Computer Science Depart-
ment, Australian National University, Canberra, Aus-
tralia.
Nabi-Abdolyousefi, M. and Mesbahi, M. (2012). Network
identification via node knockout. IEEE Transactions
on Automatic Control, 57(12):3214–3219.
Olfati-Saber, R. and Murray, R. M. (2004). Consensus
problems in networks of agents with switching topol-
ogy and time-delays. IEEE Transactions on automatic
control, 49(9):1520–1533.
Ota, J. (2006). Multi-agent robot systems as distributed au-
tonomous systems. Advanced engineering informat-
ics, 20(1):59–70.
Rahimian, M. A., Ajorlou, A., Tutunov, R., and Aghdam,
A. G. (2013). Identifiability of links and nodes in
multi-agent systems under the agreement protocol.
In 2013 American Control Conference, pages 6853–
6858. IEEE.
Scharre, P. (2018). How swarming will change warfare.
Bulletin of the atomic scientists, 74(6):385–389.
Stanhope, S., Rubin, J. E., and Swigon, D. (2014). Identi-
fiability of linear and linear-in-parameters dynamical
systems from a single trajectory. SIAM Journal on
Applied Dynamical Systems, 13(4):1792–1815.
Sun, C. and Dai, R. (2015). Identification of network topol-
ogy via quadratic optimization. In 2015 American
Control Conference (ACC), pages 5752–5757. IEEE.
Tan, Y. and Zheng, Z. (2013). Research advance in swarm
robotics. Defence Technology, 9(1):18–39.
Teodorovic, D. (2003). Transport modeling by multi-agent
systems: a swarm intelligence approach. Transporta-
tion planning and Technology, 26(4):289–312.
The MathWorks, Inc. (2019). Deep Learning Toolbox,
MATLAB 2019a. Natick, Massachusetts, U.S.
Vald
´
es-Sosa, P. A., S
´
anchez-Bornot, J. M., Lage-
Castellanos, A., Vega-Hern
´
andez, M., Bosch-Bayard,
J., Melie-Garc
´
ıa, L., and Canales-Rodr
´
ıguez, E.
(2005). Estimating brain functional connectivity with
sparse multivariate autoregression. Philosophical
Transactions of the Royal Society B: Biological Sci-
ences, 360(1457):969–981.
van Waarde, H. J., Tesi, P., and Camlibel, M. K. (2019).
Topology reconstruction of dynamical networks via
constrained lyapunov equations. IEEE Transactions
on Automatic Control, 64(10):4300–4306.
Wu, X., Zhao, X., L
¨
u, J., Tang, L., and an Lu, J. (2015).
Identifying topologies of complex dynamical net-
works with stochastic perturbations. IEEE Transac-
tions on Control of Network Systems, 3(4):379–389.
APPENDIX
10
40
70
100
130
160
190
220
250
280
310
340
370
400
10
20
30
40
50
60
70
80
Number of Graphs Sampled
Mean Success (%)
Mean Success of 4-Node Trained Network for
Prediction of P.-S. Nodes of 8-Node Graph
Primary Node
Secondary Node
Figure 6: Results of testing a pattern-recognition network
trained on data from a small-scale (4-node) system on large-
scale (8-node) data.
25
100
175 250 325
400
10
20
30
40
50
60
70
80
Number of Graphs Sampled
Mean Success (%)
Mean Success of 4-Node Trained Network for
Prediction of P.-S. Nodes of 9-Node Graph
Primary Node
Secondary Node
Figure 7: Results of testing a pattern-recognition network
trained on data from a small-scale (4-node) system on large-
scale (9-node) data.
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
264
