
An Empirical Study on Machine Learning Models for Potato Leaf
Disease Classification using RGB Images
Soma Ghosh, Renu Rameshan and Dileep A. D.
Indian Institute of Technology, Mandi, Himachal Pradesh, India
Keywords:
Potato Leaf Disease Classification, Early Blight, Late Blight, Healthy Leaves, Salient Region based
Segmentation, Gabor Filter Bank, Focus/ Defocus Cue, Convolutional Neural Network (CNN), Fully
Connected Neural Network (FCNN), Support Vector Machine (SVM).
Abstract:
In this work, an empirical study is conducted on classification models built using RGB images of potato
leaves. A series of experiments are done by training convolutional neural network (CNN) and support vector
machine (SVM) using images captured in laboratory and field conditions and processed samples of images
captured in field. A salient region based segmentation algorithm is devised to generate processed version of
the images captured in field which performed well with respect to manually segmented ground truth of the
dataset. Severe inconsistencies are observed in experimental results, particularly when train and test samples
of models are similar images but captured under different environmental conditions. Following the analysis
of obtained results, we come up with a set of clear directions to create an image dataset, which can lead to a
reliable classification accuracy.
1 INTRODUCTION
In spite of commendable agricultural advancement,
loss of yield due to pests and fungal infections in
plants causes havoc in agriculture and eventually the
economy. Early detection and diagnosis of diseases
can prevent an epidemic, but this process is still heav-
ily dependent on manual expertise and laboratory
based diagnosis which is time consuming, laborious
(at least 1–2 days for sample harvest, processing and
analysis (Martinelli et al., 2015)) and sometimes er-
roneous for non-native diseases (Ngugi et al., 2020).
An automatic disease detection software imple-
mented in unmanned aerial vehicles (UAV) or hand-
held mobile devices can play a significant role in pre-
liminary diagnosis of diseases in the fields, particu-
larly for wide area plantation where manual surveil-
lance is next to impossible and/or for remote areas
with limited logistics. Usually disease spots on plant
leaves are clearly visible in an RGB image and since
mobile cameras are good enough to capture such im-
ages, using RGB images of plant leaves to train a stan-
dard machine learning models is a cost-effective solu-
tion to create such automated systems.
However an RGB image (referred to as “image”
now onward) based model exhibits robustness and
guaranteed performance only when it learns precise
features related to the presence and absence of disease
spot/s on the leaves properly. Here precise means, the
features should be learnt from that region of the image
where disease spot is present and proper means, the
features should be discriminative. Extraction of rele-
vant and discriminative features from images of plant
leaves is still a very challenging task and an open re-
search topic till date.
In this work an empirical study is conducted on
machine learning models trained using RGB images
of potato leaves to classify these images into three
classes - early blight, late blight and healthy leaves.
Assuming that issues related to image quality like
background in images, uneven illumination, defocus,
low inter-class and high intra-class variation of sam-
ple images etc. and environment of sample collec-
tion may impact the behaviour of image classifiers,
we have experimented mainly with datasets than the
architecture of classification models.
Different classifiers or models are built by vary-
ing the following types of dataset: 1) original in-
field dataset, 2) original lab-prepared dataset, 3) aug-
mented in-field dataset, 4) segmented in-field dataset,
5) patches extracted from in-field samples and 6) vec-
tor representation of in-field images based on the con-
fidence scores generated by a patch based classifier.
Though primary architecture of the models is convo-
Ghosh, S., Rameshan, R. and D., D.
An Empirical Study on Machine Learning Models for Potato Leaf Disease Classification using RGB Images.
DOI: 10.5220/0010234805150522
In Proceedings of the 10th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2021), pages 515-522
ISBN: 978-989-758-486-2
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
515

lutional neural network (CNN), a support vector ma-
chine (SVM) is also trained using vector representa-
tion of in-field images.
Average accuracies of the models range from
98.60% (achieved by model trained on lab-prepared
samples and evaluated on corresponding test sam-
ples) to 40.30% (achieved by model built using lab-
prepared test samples and evaluated by segmented
in-field samples). Inconsistent experimental results
reveal the adverse effect of issues related to image
quality mentioned earlier, on the learning of desired
features capturing the presence or absence of disease
spot/s on leaves from images. In summary, our con-
tributions in this work are:
1. A segmentation algorithm is devised based on fo-
cus/defocus cue of the images of in-field dataset
which achieved 77.32% overlap index, 81.3% and
94.22% precision and recall, respectively with re-
spect to the manually created ground truth of the
same dataset.
2. Patches extracted from original in-field images are
automatically class-labelled using this segmenta-
tion algorithm.
3. Design of patch based and vector representation
based classifiers. Results of these show the ad-
verse effect of a) low inter-class and high intra-
class variation of samples and b) improperly cap-
tured images on the classification performance.
4. Abysmal testing and cross-testing results of the
models prove that, though learnt features seem to
be discriminative enough, networks are not learn-
ing precise features relevant to disease spot/s and
healthy leaf parts as desired.
The organisation of the paper is as follows: sec-
tion 2 contains the related works in automatic plant
disease detection using machine learning techniques.
Section 3 and 4 contain the experimental method
and observation and analysis, respectively. Section
5 presents the conclusions of the work.
2 RELATED WORK
We are reviewing only those works from litera-
ture which deals with RGB image based automatic
plant disease detection systems. Several methods
are reported using various state-of-the-art machine
learning models trained on RGB images of differ-
ent kinds of crop and vegetable plant leaf images
(Ngugi et al., 2020), (Saleem et al., 2019) and
(Kaur et al., 2018). All these works mainly com-
pared performance of conventional machine learning
models like SVM and /or well-known CNN models
like AlexNet (Krizhevsky et al., 2012), VGG16 (Si-
monyan and Zisserman, 2015), InceptionV3 (Szegedy
et al., 2015), FRCNN (Ren et al., 2015), SSD (Liu
et al., 2016) etc. Most of these methods used a
lab-prepared dataset - Plant Village (Mohanty et al.,
2016) and reported good classification performance
(average accuracy is 96%). Some works are also re-
ported using a few hundred to few thousand of in-field
samples with accuracies ranging from 89% to 98%.
However in these works, adaptability and effec-
tiveness of the classifiers are not unquestionably es-
tablished for images of similar plant species but
captured in different real-world situations and these
works lack in justification of selection of the used
CNN architectures. Also the analysis and reasoning
of varying performance by compared models on same
dataset are not reported thoroughly. Methods using
in-field data also lack in analysis and justification
of achieving high accuracy with such less real-world
data. Few methods used well-known CNN visuali-
sation methods and reported the highlighted disease
spots in lab-prepared images (Ngugi et al., 2020). But
again quantitative and qualitative measures of high-
lighted image regions and detailed analysis of their
impact on model’s performance is not reported ex-
plicitly. Hence these works are not being reviewed
in detail.
As stated earlier, the key factor in creating an effi-
cient plant leaf image based disease detection system
is proper extraction of discriminative and relevant fea-
tures of disease spots and leaves from images. Hence,
emphasis of these experiments should be to analyse
the suitability of sample images for learning desired
features by observing the impact of quality of images
on performance of the models. Also, for proper val-
idation of plant disease classification models, exper-
iments should be conducted using both lab-prepared
and in-field images on models of similar architecture.
3 EXPERIMENTAL METHOD
In this work, the emphasis is on studying the im-
pact of various data related issues on the behaviour
of machine learning models trained to classify im-
ages of potato leaves with or without diseases. So, we
started the experiments by fine-tuning a pre-trained
CNN using images captured in widely varying con-
ditions, namely in-field and lab-prepared datasets as
described in section 3.1.1. The pre-trained VGG16
model (Simonyan and Zisserman, 2015) is chosen for
fine-tuning due to its relatively smaller size and ex-
cellent performance on ImageNet dataset (Deng et al.,
ICPRAM 2021 - 10th International Conference on Pattern Recognition Applications and Methods
516

(a) Early Blight
(b) Late Blight
(c) Healthy Leaves
Figure 1: Sample images from two datasets - first column corresponds to the CPRI dataset (in-field) and second column to the
PV dataset (lab-prepared).
2009). For both types of dataset, different fine-tuned
models are built by changing the numbers of higher
convolutional layers of VGG16 as described in sec-
tion 3.2.1.
While testing the trained models we observed a
large difference between the performances of models
trained on lab-prepared images and models trained
on in-field samples. Since the number of samples are
less, the network may not learn features which faith-
fully represent the complex in-field dataset. Hence
this dataset is augmented using geometrical trans-
formations. Classifiers built using the augmented
dataset, performed better than their unaugmented
counterparts with an average improvement of 5% in
classification accuracies; yet this performance is in-
ferior to the performance of models trained on lab-
prepared samples.
Assuming that this is due to the adverse effect
of background in the in-field images, a segmentation
algorithm is devised for in-field images and similar
experiments are conducted using segmented in-field
dataset. Observing the poorer performance by these
models, we designed patch based vector representa-
tion of in-field images to force the model to learn dis-
criminative features of disease spots, healthy parts of
leaves and background and to take classification de-
cision according the presence or absence of disease
spots. For uniformity across all the experiments, input
size and values of hyper-parameters are kept identical
as described in experimental setup (section 3.3).
Excellent performance of models trained on lab-
prepared images and gradual degradation in results
of models trained on processed in-field images lead
us to perform cross-testing of the models trained on
whole images. By cross-testing we mean, testing gen-
eralization ability of the models on test samples taken
from similar but different datasets. Observations and
analysis of the experiments follow in section 4.
(a) (b) (c) (d)
Figure 2: (a) original image, (b) ground truth, (c) segmen-
tation mask and (d) segmented image.
Table 1: Evaluation metrics of segmentation mask.
Overlap Index Precision Recall F-measure
77.32% 81.3% 94.22% 86.69%
3.1 The Datasets
3.1.1 Original Datasets
1. In-field or CPRI Dataset: set of images provided
by Central Potato Research Institute (CPRI),
Shimla, India, captured in potato plantation sites
(1). This dataset contains total 3387 images
among which 113 images are of Healthy Leaves
class, 1781 and 1493 images are of Early Blight
and Late Blight class, respectively.
2. Lab-prepared or PlantVillage (PV): a public
dataset (Mohanty et al., 2016) (1). This dataset
contains a total of 2152 images captured in lab-
oratory - 152 images in healthy leaves class and
1000 images in each of the disease classes.
Both the datasets are divided into training-validation-
test sets in the ratio 8:1:1.
3.1.2 Derived Datasets
1. Augmented Dataset (augD): Training samples
of CPRI dataset are geometrically transformed by
random flip and random rotations (angle variation
= 20
◦
). Total 21000 images are created with 7000
images of each class.
An Empirical Study on Machine Learning Models for Potato Leaf Disease Classification using RGB Images
517

(a) Early Blight (b) Late Blight
Figure 3: Colour-coded saliency map - first and third are
original images; second and fourth images are the salient
maps. Blue colour denotes disease spots on the leaves and
green colour marks the healthy parts of leaves.
(a) Early Blight
(b) Late Blight
Figure 4: Patch based representation of an image: from left
to right - original image, image divided into patches, patch
label map and confidence score map. (Patch labels in (c)-
0:background, 1:early blight, 2:late blight and 3:healthy).
2. Segmented Dataset (segD): CPRI images are
segmented based on the concept that, focused re-
gions have more edge information than defocused
or blurred regions. A binary saliency map is cre-
ated for an image by its local frequency analysis
using two-dimensional (2D) Gabor filter bank. A
green hue mask is also created to further lever-
age the extraction of focused leaves part with dis-
ease spots only. Figure 2 depicts the resulted seg-
mentation mask and performance metrics of the
devised segmentation algorithm evaluated using
manually segmented ground truth images of CPRI
dataset is in Table 1.
3. Image Patch Dataset: Each image in the two
disease classes of both in-field and lab-prepared
dataset is divided into overlapping patches and
categorized in four classes - background, early
blight, late blight and healthy. The colour coded
saliency map (Figure 3) generated by the segmen-
tation algorithm devised earlier is used to dis-
criminate between green leaf part and the disease
spots. Patches extracted from train-validation-test
sets of original images are used for respective
tasks only.
4. Vectorized Image Dataset: Each image in
in-field dataset is divided into non-overlapping
patches and fed to the patch based classifier to
generate patch-wise classification scores for each
image (Figure 4). As spatial position of the clas-
sified patches is no more significant for classifi-
cation of the original image; each image is repre-
sented by four class-wise normalised aggregated
confidence scores, corresponding to background,
early blight, late blight and healthy class, respec-
tively.
3.2 The Classifiers
3.2.1 Fine-tuned Models
To built the fine-tuned models, pre-trained VGG16 is
trained along with one fully connected (FC) layer of
1024 nodes and one classification layer of three nodes
to produce classification scores. For each fine-tuned
model, FCs are reinitialised.
1. FCNN:
FCNN is trained on features extracted from
the images of training and validation sets of
a dataset using pre-trained VGG16. Models
built using original CPRI and PV samples are
named as FCNN-CPRI and FCNN-PV, respec-
tively. FCNN-augD, FCNN-segD are built from
augmented and segmented CPRI training sam-
ples, respectively.
2. FT13:
These models are created by fine-tuning last con-
volutional layer of pre-trained VGG16 along with
an initialised FCNN. Depending on the used
dataset, the built classifiers are referred to as
FT13-CPRI, FT13-PV, FT13-augD and FT13-
segD.
3. FTB5:
Last three layers in fifth block (B5) of pre-trained
VGG16 are fine-tuned with a redefined FCNN.
Four such classifiers are built and referred to as
FTB5-CPRI, FTB5-PV, FTB5-augD and FTB5-
segD.
3.2.2 Trained from Scratch Models
The shallow networks (SNet) are sequential networks
having filter of size 3 × 3 in each convolutional layer
and one maxpool layer after each pair of convolu-
tional layers. There is one fully connected (FC) layer
with 1024 nodes and the classification layer to pro-
duce three class scores. Except the input layer, input
of all the convolutional and fully connected layers of
SNets are batch normalised. l
2
kernel regularisation
is also applied to all the layers of SNets. Depending
on the used dataset, number of layers and number of
filters in each layer are varied:
ICPRAM 2021 - 10th International Conference on Pattern Recognition Applications and Methods
518
Table 2: Testing results of the classifiers (Description of cell contents and naming convention of classifiers and datasets are as
per section 4).
Train-Test set Classifier
FCNN FT13 FTB5 SNet
CPRI-CPRI 88.87(0.9051, 0.7440, 0.7896) 85.67(0.8606, 0.7223, 0.7600) 85.07(0.8289, 0.6645, 0.6853) -
PV-PV 98.60(0.9712, 0.9711, 0.9711) 98.14(0.9869, 0.9489, 0.9663) 96.74(0.9872, 0.9300, 0.9548) -
segD-segD 84.48(0.8155, 0.7848, 0.7985) 85.97(0.8155, 0.8459, 0.8287) 80.90(0.7556, 0.7556, 0.7556) 88.06(0.8205, 0.8728, 0.8433)
augD-augD 88.66(0.8508, 0.8280, 0.8387) 88.96(0.8683, 0.8308, 0.8478) 88.06(0.8123, 0.8429, 0.8263) 92.84(0.9110, 0.8789, 0.8927)
Table 3: Cross-testing results of the classifiers (Description of cell contents and naming convention of classifiers and datasets
are as per section 4).
Train-Test set Classifier
FCNN FT13 FTB5 SNet
CPRI-PV 44.19(0.3218, 0.3356, 0.2467) 46.05(0.1995, 0.3300, 0.2190) 41.40(0.1697, 0.2967, 0.2007) -
PV-CPRI 53.73(0.2905, 0.3226, 0.2881) 49.25(0.2721, 0.3026, 0.2818) 51.94(0.3670, 0.3734, 0.3556) -
PV-segD 46.87(0.3271, 0.3462, 0.3216) 45.08(0.3158, 0.3338, 0.3094) 40.30(0.4078, 0.3625, 0.3385) -
segD-PV 46.98(0.4575, 0.4122, 0.4226) 45.12(0.4471,0.4367,0.4321) 58.60(0.5857,0.5522,0.5635) 65.58(0.5249,0.4700,0.4372)
augD-PV 48.84(0.4323,0.5200,0.3996) 48.84(0.4786,0.5011,0.4227) 53.02(0.5058,0.5500,0.4688) 48.37(0.4347,0.4600,0.4449)
1. The SNets built using augmented and segmented
CPRI samples (SNet-augD and SNet-segD) have
ten convolutional layers, five max-pool layers and
total 736 convolutional filters as per following
layer-wise arrangement: 32 −32− 32−64 −64 −
128 − 128 − 128.
2. The SNet built on patches (SNet-patch) has six
convolutional layers, three max-pool layers and
total 272 convolutional filters as per following
layer-wise arrangement: 16 − 32− 32−64 −64 −
128.
3.2.3 Support Vector Machine
An SVM is trained using the vectorized images of
CPRI dataset. Kernel function is the radial basis func-
tion (RBF) with trade-off parameter (C) = 10 and
γ = 0.1, set empirically.
3.3 Experimental Setup
For fine-tuning the models, images from all the
datasets are resized to 224 × 224 pixels. Input im-
age size for SNet-augD and SNet-segD is 256 × 256
pixels and for SNet-patch the size is 128 × 128 pix-
els. All input images or patches are with three colour
channels (RGB).
Models are trained for 200 epochs using origi-
nal CPRI and PV samples and models built from de-
rived datasets are trained for 500 epochs. In all the
experiments, categorical cross-entropy loss is mini-
mized using RMSprop optimizer with learning rate
10
−4
. The hyper-parameter (λ) for l
2
regularization
in SNet-augD and SNet-segD is set to 10
−3
and for
SNet-patch it is 10
−4
.
4 OBSERVATION AND ANALYSIS
Severe inconsistencies are observed in the perfor-
mance of the models presented in Table 2 to Table
10. Class names are abbreviated in all the tables as:
EB - early blight, LB - late blight and HL - healthy
leaves. The “model-dataset” naming convention of
classifiers are as per section 3.2. Each cell in the
table represents accuracy(mean precision, mean re-
call, mean f-measure) for the corresponding model.
Lowest testing accuracy of the models trained on PV
images is 96.74% (by FTB5 corresponding to PV-
PV train-test pair in second row of Table 2), whereas
the highest cross-testing accuracy of these models is
53.73% (by FCNN trained on PV images and tested
on the original CPRI test set in second row of Table
3). This anomaly is more perceivable in the confusion
matrices of these models. Class-wise samples are per-
fectly classified in testing as can be seen in Table 4,
whereas in cross-testing most of the CPRI test images
are classified as early blight by PV models (Table 5).
On the other hand, most of the segmented CPRI im-
ages are classified as late blight by PV models (Table
6).
Similarly for models trained on original CPRI im-
ages, the lowest testing accuracy is 85.07% (by FTB5
corresponding to CPRI-CPRI train-test pair in first
row of Table 2), but highest cross-testing accuracy is
46.05% (by FT13 trained on CPRI images and tested
on PV test images in first row of Table 3). Mod-
els trained on augmented and segmented CPRI im-
ages followed the same trend. As can be seen in test-
ing confusion matrices (Table 7 and Table 9) of these
models that, test images of corresponding datasets are
moderately classified. But in cross-testing, most of
the PV test samples are classified as early blight (Ta-
An Empirical Study on Machine Learning Models for Potato Leaf Disease Classification using RGB Images
519
Table 4: Testing confusion matrices of the classifiers trained on original CPRI and PV datasets (Class name abbreviations and
model-dataset naming conventions of classifiers in present and following tables are as per section 4).
Actual Predicted
FCNN FT13 FTB5 FCNN FT13-PV FTB5-PV
Train-Test dataset: CPRI-CPRI Train-Test dataset: PV-PV
EB LB HL EB LB HL EB LB HL EB LB HL EB LB HL EB LB HL
EB 178 18 0 175 20 1 172 24 0 99 1 0 99 1 0 99 1 0
LB 15 104 0 15 104 0 9 109 1 0 99 1 1 99 0 0 100 0
HL 7 4 9 6 6 8 12 4 4 0 1 14 0 2 13 0 3 12
Table 5: Cross-testing confusion matrices of the classifiers trained on original CPRI and PV datasets.
Actual Predicted
FCNN FT13 FTB5 FCNN FT13 FTB5
Train-Test dataset: CPRI-PV Train-Test dataset: PV-CPRI
EB LB HL EB LB HL EB LB HL EB LB HL EB LB HL EB LB HL
EB 94 6 0 98 2 0 88 12 0 165 31 0 145 51 0 154 37 5
LB 99 0 1 99 1 0 99 1 0 104 15 0 99 20 0 94 16 9
HL 9 5 1 10 5 0 14 1 0 14 6 0 8 12 0 14 2 4
Table 6: Cross-testing confusion matrices of the classifiers trained on PV datasets and tested on segmented CPRI dataset.
Actual Predicted
FCNN FT13 FTB5
EB LB HL EB LB HL EB LB HL
EB 85 111 0 81 115 0 52 140 4
LB 47 72 0 49 70 0 36 80 3
HL 6 14 0 6 14 0 1 16 3
ble 8 and Table 10). In fact, average cross-testing ac-
curacy of all the models is below 50%, even cross-
testing performances of well-behaved models trained
on PV images are similar to the models trained on
CPRI images.
So cross-testing results of these models implies
that, apparent class discriminative features learnt by
the networks from their respective datasets are not
precisely relevant to the disease spots and healthy
parts of leaves, which are common to the images of
all the datasets irrespective of their background. So,
if some features related to presence or absence of dis-
ease spot/s on the leaves are actually learnt by the
models, classifiers might have shown bias towards a
certain set of samples in cross-testing, but would not
show such appalling anomalies. Particularly, classi-
fiers trained on PV images should have detected com-
mon features from segmented images and vice versa,
as images from these two datasets are quite similar
in appearance (second column of Figure 1 and fourth
column of Figure 2).
To investigate these inconsistencies both PV and
CPRI datasets are observed visually. It is noticed that,
PV images have visual difference between samples
of three classes (Figure 1). Majority of early blight
images have many small disease spots on the leaf,
whereas late blight images have one or two big spots
on a leaf. All the healthy leaves images contain one
very clean and well shaped leaf compared to the im-
ages of the other two classes.
In contrast to the PV images, CPRI images of
all the classes have cluttered background comprised
of weeds, ground patches with wide illumination
variation. Foreground of these images contains
some prominent leaves having prevalent uniformity of
shape, texture and colour across all the classes with or
without noticeable disease spot/s. Moreover, overall
appearance of CPRI images are varying image-wise
rather than class-wise.
From these observations it can be inferred that,
learnt features are capturing overall organization of
foreground and background in the images. This hy-
pothesis is well supported by the wide difference of
testing accuracies of models trained on PV images
and original and augmented CPRI images. As class-
wise combination of foreground and background are
quite distinguishable in PV images than CPRI images,
class discriminative patterns learnt from PV images
are better separable by classifiers than those of CPRI
images.
The degraded performance of segmented CPRI
image based classifiers also provide strong indication
to the importance of background-foreground combi-
nation as class discriminative features of the datasets;
as without background, segmented images appeared
to be further less discriminative, class-wise. As over-
all combination of foreground and background in im-
ages is bound to vary with datasets, all types of mod-
els performed equally poorly in cross-testing.
In continuation to the observation of dataset, it
must be noticed in Figure 1 that, there is no visi-
ICPRAM 2021 - 10th International Conference on Pattern Recognition Applications and Methods
520
Table 7: Testing confusion matrices of the fine-tuned models trained on segmented and augmented CPRI dataset.
Actual Predicted
FCNN FT13 FTB5 FCNN FT13 FTB5
Train-Test dataset: augD-augD Train-Test dataset: segD-segD
EB LB HL EB LB HL EB LB HL EB LB HL EB LB HL EB LB HL
EB 180 14 2 180 13 3 174 15 7 171 22 3 166 25 5 167 25 4
LB 14 103 2 15 104 0 12 106 1 19 99 1 12 106 1 25 91 3
HL 4 2 14 5 1 14 4 1 15 5 2 13 2 2 16 4 3 13
Table 8: Cross-testing confusion matrices of the fine-tuned models trained on segmented and augmented CPRI dataset.
Actual Predicted
FCNN FT13 FTB5 FCNN FT13 FTB5
Train-Test dataset: augD-PV Train-Test dataset: segD-PV
EB LB HL EB LB HL EB LB HL EB LB HL EB LB HL EB LB HL
EB 92 6 2 94 6 0 88 11 1 63 36 1 64 35 1 70 29 1
LB 84 4 12 92 3 5 70 17 13 62 34 4 67 27 6 47 49 4
HL 6 0 9 7 0 8 5 1 9 3 8 4 5 4 6 3 5 7
Table 9: Testing confusion matrices of the SNets trained on
segmented and augmented CPRI datasets.
Actual Predicted Predicted
SNet-augD SNet-segD
EB LB HL EB LB HL
EB 182 13 1 172 17 7
LB 4 114 1 12 106 1
HL 5 0 15 3 0 17
Table 10: Cross-testing confusion matrices of the SNets
trained on segmented and augmented CPRI datasets and
tested on PV dataset.
Actual Predicted Predicted
SNet-augD SNet-segD
EB LB HL EB LB HL
EB 53 47 0 41 59 0
LB 41 45 14 0 100 0
HL 5 4 6 0 15 0
ble difference between disease spots of two classes in
CPRI dataset. Whereas, shape and size of the disease
spots on the leaves of a single class is varying widely,
ranging from barely notable smudge to a patch cov-
ering almost the entire leaf. Such wide intra-class
and narrow inter-class variation of samples hinder the
learning of class discriminative features. Performance
of patch based classifier is evidence to this fact.
Classification accuracy of this network is quite
good (93.78% in first column of Table 11), how-
ever it is confused between two disease classes (Ta-
ble 12). Approximately 96% of misclassified patches
from early blight class belong to late blight class and
around 82% of misclassified patches from late blight
class is marked as early blight patches. Whereas, less
than 10% of misclassified patches from both the dis-
ease classes are in background or healthy patch class.
The patch based vector representation of whole
images in CPRI dataset shows other confusions due
to unevenly illuminated leaf parts and tiny and blurry
disease spots on leaves (Figure 5). As majority of
images in all the classes have such drawbacks, vec-
tor representations of the whole images are erroneous
causing the lowest classification score by the model
trained on vector represented images (in second col-
umn of Table 11). Moreover, as per potato disease lit-
erature ((Weingartner, 1981), (Thurston and Schultz,
1981)), two types of disease spots have distinctive
patterns, which are not perceivable in most of the im-
ages in any of the two datasets.
Table 11: Testing results of the classifiers trained on patches
and vector representation of CPRI images.
SNet-patch SVM
93.78(0.9391, 0.9420, 0.9401) 80.90(0.7000, 0.8000, 0.7100)
Table 12: Confusion matrices of the classifiers trained on
patches and vector representation of CPRI dataset. (EB:
early blight, LB: late blight, HL: healthy leaves and BG:
background.)
Actual Predicted
SNet-patch SVM
EB LB HL BG EB LB HL
EB 3606 424 9 11 152 11 33
LB 187 2833 23 17 6 104 9
HL 12 22 2913 53 4 1 15
BG 36 8 14 2942
5 CONCLUSIONS
In this work, we explored several ways to build an
effective classifier for potato leaf disease using RGB
images. Based on our observations, we recommend
to create a large dataset having following properties
to create an effective and efficient image based auto-
mated system - 1) collected samples should have min-
imum interference from background, 2) a single im-
age is desired to have even illumination throughout,
3) disease spots on the leaves must be entirely in fo-
cus so that distinctive patterns of two types of disease
An Empirical Study on Machine Learning Models for Potato Leaf Disease Classification using RGB Images
521
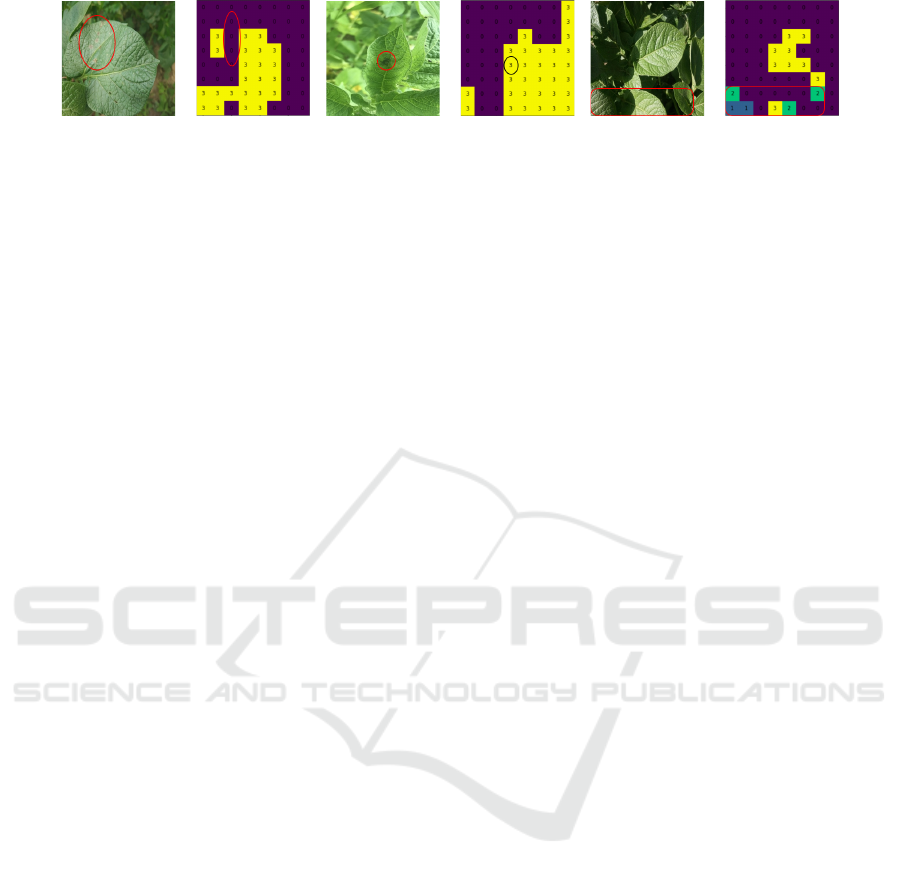
(a) Early Blight (b) Late Blight (c) Healthy Leaves
Figure 5: Misinterpretation of patches due to defocus and/or uneven illumination and/or unnoticeable disease spots. First,
third and fifth are original images ; second, fourth and sixth images are corresponding patch label maps. (Patch labels - 0:
background, 1: early blight, 2: late blight and 3: healthy.)
spots are intelligible in image, 4) in case of multiple
spots of varying sizes on a cluster of leaves, multi-
ple images must be captured and 5) samples of a par-
ticular disease must be labelled as per their maturity
phase, as appearance of disease spots differs widely
with time. These properties are expected to provide
clarity to region of interest and to ensure sufficient
class separability of the sample images. A robust seg-
mentation algorithm is also required to be devised to
extract a single leaf with disease spots or a healthy
leaf only from the images captured in field.
Our observations suggest that, classification accu-
racy alone is not a good performance metric for this
type of systems. We deduce that, quantitative and
qualitative measure of features learnt by the models
can only establish the trustworthiness of such models
with some guarantee. We are carrying out an exhaus-
tive analysis of features learnt by the models to prove
our hypothesis that features represent the overall or-
ganisation of an image rather than leaf and disease
region alone.
ACKNOWLEDGEMENTS
This research work is a part of the project Farmer-
Zone, sponsored by Department of Biotechnology,
Govt. of India. We thank Central Potato Research In-
stitute (CPRI), Shimla, India for providing the dataset
from field.
REFERENCES
Deng, J., Dong, W., Socher, R., Li, L., Kai Li, and Li Fei-
Fei (2009). Imagenet: A large-scale hierarchical im-
age database. In 2009 IEEE Conference on Computer
Vision and Pattern Recognition, pages 248–255.
Kaur, S., Pandey, S., and Goel, S. (2018). Plants disease
identification and classification through leaf images:
A survey. Archives of Computational Methods in En-
gineering, 26:507–530.
Krizhevsky, A., Sutskever, I., and Hinton, G. E. (2012). Im-
agenet classification with deep convolutional neural
networks. In Advances in Neural Information Pro-
cessing Systems 25, pages 1097–1105.
Liu, W., Anguelov, D., Erhan, D., Szegedy, C., Reed, S., Fu,
C.-Y., and Berg, A. (2016). Ssd: Single shot multibox
detector. volume 9905, pages 21–37.
Martinelli, F., Scalenghe, R., Davino, S., Panno, S., Scud-
eri, G., Ruisi, P., Villa, P., Stroppiana, D., Boschetti,
M., Goulart, L. R., Davis, C. E., and Dandekar, A. M.
(2015). Advanced methods of plant disease detection.
a review. Agron. Sustain. Dev., 35:1–25.
Mohanty, S. P., Hughes, D. P., and Salath
´
e, M. (2016). Us-
ing deep learning for image-based plant disease detec-
tion. Front. Plant Sci., 7:1419.
Ngugi, L. C., Abelwahab, M., and Abo-Zahhad, M. (2020).
Recent advances in image processing techniques for
automated leaf pest and disease recognition – a review.
Information Processing in Agriculture.
Ren, S., He, K., Girshick, R., and Sun, J. (2015). Faster
r-cnn: Towards real-time object detection with region
proposal networks. In Cortes, C., Lawrence, N. D.,
Lee, D. D., Sugiyama, M., and Garnett, R., editors,
Advances in Neural Information Processing Systems
28, pages 91–99. Curran Associates, Inc.
Saleem, M. H., Potgieter, J., and Arif, K. M. (2019). Plant
disease detection and classification by deep learning.
Plants, 8.
Simonyan, K. and Zisserman, A. (2015). Very deep con-
volutional networks for large-scale image recognition.
CoRR, abs/1409.1556.
Szegedy, C., Wei Liu, Yangqing Jia, Sermanet, P., Reed, S.,
Anguelov, D., Erhan, D., Vanhoucke, V., and Rabi-
novich, A. (2015). Going deeper with convolutions. In
2015 IEEE Conference on Computer Vision and Pat-
tern Recognition (CVPR), pages 1–9.
Thurston, H. and Schultz, O. (1981). Late blight. Com-
pendium of Potato Diseases, pages 41–42.
Weingartner, D. (1981). Early blight. Compendium of
Potato Diseases, pages 43–44.
ICPRAM 2021 - 10th International Conference on Pattern Recognition Applications and Methods
522
