
Movement Control with Vehicle-to-Vehicle Communication by using
End-to-End Deep Learning for Autonomous Driving
Zelin Zhang and Jun Ohya
Department of Modern Mechanical Engineering, Waseda University, Tokyo, Japan
Keywords: Autonomous Driving, Deep Learning, End-to-End, Vehicle-to-Vehicle Communication.
Abstract: In recent years, autonomous driving through deep learning has gained more and more attention. This paper
proposes a novel Vehicle-to-Vehicle (V2V) communication based autonomous vehicle driving system that
takes advantage of both spatial and temporal information. The proposed system consists of a novel
combination of CNN layers and LSTM layers for controlling steering angle and speed by taking advantage of
the information from both the autonomous vehicle and cooperative vehicle. The CNN layers process the input
sequential image frames, and the LSTM layers process historical data to predict the steering angle and speed
of the autonomous vehicle. To confirm the validity of the proposed system, we conducted experiments for
evaluating the MSE of the steering angle and vehicle speed using the Udacity dataset. Experimental results
are summarized as follows. (1) “with a cooperative car” significantly works better than “without”. (2) Among
all the network, the Res-Net performs the best. (3) Utilizing the LSTM with Res-Net, which processes the
historical motion data, performs better than “no LSTM”. (4) As the number of inputted sequential frames,
eight frames turn out to work best. (5) As the distance between the autonomous host and cooperative vehicle,
ten to forty meters turn out to achieve the robust result on the autonomous driving movement control.
1 INTRODUCTION
During the past few years, autonomous self-driving
cars have become more and more popular because of
the development of sensor equipment and computer
vision technology. Many technology companies and
car manufactures have joined this industry, such as
Google and General Motors. The purpose of
autonomous driving is to let the vehicle perceive the
surrounding environment and cruise with no human
intervention. Therefore, the most important task for
the autonomous driving system is to map the
surrounding environment to the driving control.
Recently, deep convolutional networks have
achieved great success in traditional computer vision
tasks such as segmentation and object detection. It
seems that the deep learning-based method is
appropriate for autonomous driving because it can
deal with more scenarios. Some state-of-the-art works
divide the autonomous driving problem into several
small tasks and fuse the results of each task to a final
control decision. The rest of the state-of-the-art works
provide an End-to-End solution that allows the
autonomous system to learn the mapping from the
raw image data to the steering control. Although all
the recent state-of-the-art systems have achieved
great successes, we still believe that those approaches
lack the temporal information because of ignoring the
relationship between sequential image frames.
Therefore, we need a tool to capture and process
temporal information. With the development of deep
neural networks (DNN), Long Short-Term Memory
(LSTM) has been designed to process sequential data
in a time series. In recent years, it has gained more
and more attention and has been popular in many
fields such as human action recognition and natural
language processing. It is a reasonable choice to apply
the LSTM to deal with the temporal information in an
autonomous driving problem.
One the other hand, the temporal information is
not the only concern in autonomous driving. In our
opinion, the interaction with the surrounding
environment is also vital to autonomous driving
because the autonomous vehicle is not isolated,
especially in the urban scene. Considering the human
manual driving, people would constantly check the
movement of the vehicles that surround us. Based on
the human driving habit, the autonomous vehicle
should also consider the interaction with other
surrounding vehicle movements. The interaction with
two vehicles can be defined as Vehicle-to-Vehicle
(V2V) communication. In our opinion, V2V
Zhang, Z. and Ohya, J.
Movement Control with Vehicle-to-Vehicle Communication by using End-to-End Deep Learning for Autonomous Driving.
DOI: 10.5220/0010235703770385
In Proceedings of the 10th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2021), pages 377-385
ISBN: 978-989-758-486-2
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
377

communication can increase the level of certainty
regarding a vehicle’s surroundings and serves as an
ability for autonomous driving.
In this paper, we propose an autonomous driving
movement control system through V2V
communication by applying End-to-End deep
learning. Compared with the existing system, the
method we propose has the following two main
contributions, as follows.
1) We propose a novel method to predict the
autonomous driving movement control through
V2V communication. With the V2V
communication, the autonomous vehicle can
achieve a set of data including the motion state
and the driver’s first view images from the
surrounding vehicle. The additional information
through V2V communication can improve
system performance.
2) We propose a novel network architecture for the
autonomous driving movement control by
combining CNN with LSTM. Using the current
view and motion state from the past, the system
can perform better, because it can capture more
temporal information through the relationship
between the sequence frames.
The rest of this paper is organized as follows.
Section 2 gives an overview of the state-of-the-art
related work. The solution we propose is explained in
Section 3. In Section 4, the experimental details for
our system are given. Section 5 details the evaluation
of the experiments and the corresponding analysis.
The conclusion of our work is given in Section 6.
2 RELATED WORK
In the past few decades, great successes have been
achieved in autonomous driving. With the
development of basic knowledge in deep learning,
research groups and companies have started to
attempt a deep learning-based method to solve the
autonomous driving problem. We analyze the great
related work in the past few years and simply
categorize them into two groups: rule-based methods
and perception-based methods.
2.1 Rule-based Methods
Rule-based methods divide the autonomous driving
problem into several small tasks, such as interaction
with cars, lane following, pedestrian detection, and
traffic light recognition. Rule-based methods tend to
solve all the small tasks independently and fuse all the
results obtained by each task to achieve the final
movement control. The key point of the rule-based
system is car detection and scene understanding.
Some traditional classic methods use bounding boxes
to detect cars. However, the size of the bounding box
could influence the final results, and the margin of the
bounding box seems a waste of spatial information.
To solve these problems, semantic segmentation has
become more and more popular. Semantic
segmentation estimates the probability of every pixel
and finally makes the whole scene understandable.
Meanwhile, the lane detection also plays an important
role in rule-based systems. It is a simple way to keep
the vehicle in the lane and waiting for the next
movement control.
Even though rule-based methods have achieved
great success, the powerful sensor may intensively
increase the budget. A sensor with the vision of the
360-degree field is five times as expensive as the one
with the vision of the 120-degree field. It is very hard
to build an autonomous vehicle in the budget unless
the price of the sensor lowers. Besides, each result
gained from the sensors could influence the final
controls significantly. It may cause a significant
problem even if one of the sensors is unfunctional.
Although the rule-based system sounds reasonable, it
is still a driver assistant system other than an
autonomous driving system.
2.2 Perception-based Methods
Instead of dividing the large task into several small
ones, the perception-based method simply learns the
mapping from the images to the steering controls.
ALVINN et al. proposed an idea first: they used a
neural network to make the first attempt. Although
the network is very simple and shallow, it can still be
used in several certain situations. Based on that idea,
LeCun et al. replaced the shallow network by six
convolutional layers and called it an end-to-end
system. The end-to-end system can map the raw
pixels to the steering controls, and achieve great
robustness to the various environment. With the
development of convolutional neural networks in
recent years, some traditional hardware companies
have also joined this field. Recently, Nvidia collected
the training datasets with three cameras from the left,
right, and center, and trained a deep convolutional
neural network to map the pixels to the steering
controls. After the training procedure, one single
image from the central camera can simply decide the
steering control. However, all the methods mentioned
above aim at processing data properly to achieve
better performance.
ICPRAM 2021 - 10th International Conference on Pattern Recognition Applications and Methods
378

In recent years, some companies and research
groups such as DOCOMO and NISAN started to
realize the importance of collecting data from other
devices. However, none of them focus to use the data
from other vehicles to improve the movement control
of the autonomous vehicle. Olson et al. proposed a
system that can collect the distance data from the
other vehicles by scanning the QR code attached to
the vehicle through the camera. Based on this idea,
Eckelmann et al. improved the system by replacing
the camera with a LiDAR sensor so that they can
achieve the vehicle’s position in the surrounding
environment. Moreover, Khabbaz et al. proposed a
system with an overlooking view. The system can
collect from the camera attached to a drone in the sky.
However, all the systems mentioned above aim at
transportation planning macroscopically.
Our proposed work is based on the perception
method. However, instead of directly using the
images captured by the camera and simply mapping
to the steering control, we take the V2V
communication into account, which can provide more
additional information to help the autonomous
vehicle to make the movement decision. Besides, we
consider the historical motion state as an important
factor for making movement control decisions.
Therefore, we design a network architecture using a
combination of CNN and LSTM networks to fully use
both spatial and the temporal information through the
V2V communication.
3 METHODOLOGY
Our proposed work is based on the perception
method. However, instead of directly using the
images captured by the camera and simply mapping
to the steering control, we take the V2V
communication into account, which can provide more
additional information. Besides, we consider the
historical motion state as an important factor for
making movement control decisions. Therefore, we
design a network architecture using a combination of
CNN and LSTM networks to fully use both spatial
and temporal information through V2V
communication.
3.1 System Overview
In this paper, we propose a novel method to learn the
mapping from the images to the movement controls
by taking advantage of both spatial and temporal
information through V2V communication. We define
the cooperative vehicle as to the one that can interact
with the autonomous vehicle through V2V
communication. The cooperative vehicle is a vehicle
under human manual driving in front of the
autonomous vehicle. We consider that a camera is
attached to the center of the cooperative vehicle that
can collect image data with the driver’s view. A
cooperative vehicle can collect data and help the
autonomous vehicle make the movement control by
sending the data back to the autonomous vehicle. Due
to the low latency and high reliability of the 5G
system, the data from the cooperative vehicle can not
only enhance the safety of transportation but also
manage the traffic intelligently. Through the V2V
communication, additional data captured by
cooperative vehicle could constantly send back to the
autonomous vehicle. On the other hand, the temporal
information is provided by the time-series images
from both autonomous vehicles and cooperative
vehicle. The system combines two sets of data to
decide the driving motion control for the autonomous
vehicle.
We believe that the perception-based method
should imitate human manual driving. The only three
concerns that arise when people drive manually are
the steering angle and the speed of the current car,
which can be interpreted as acceleration or brake, as
well as the surrounding environment. In case of V2V
communications, the surrounding environment is the
state of the cooperative vehicle. Therefore, the
vehicle movement control can be described as
follows:
steeringangle,speed (1)
where the MC denotes movement control. V
represents vehicle. Based on the description (2), we
can formulate our model as follow:
,
(2)
where the auto stands for the autonomous vehicle, and
Coor stands for the cooperative vehicle. The
movement control of the autonomous vehicle at time
is determined by two sets of data that are both
the movement control of the autonomous vehicle at
time t, and the movement control of the autonomous
vehicle at time t. Each set of the movement control
can be described by two parameters that are the
steering angle and the speed of the current vehicle.
Figure 1 shows an overview of our proposed
method. Our approach tries to minimize the
difference between the human manual driving and
autonomous driving, and make the system more
stable and accurate. Our approach takes the two
sequential image frames and historical motion state as
Movement Control with Vehicle-to-Vehicle Communication by using End-to-End Deep Learning for Autonomous Driving
379
the input and predicts the future motion state which is
the steering angle and the speed for the autonomous
vehicle.
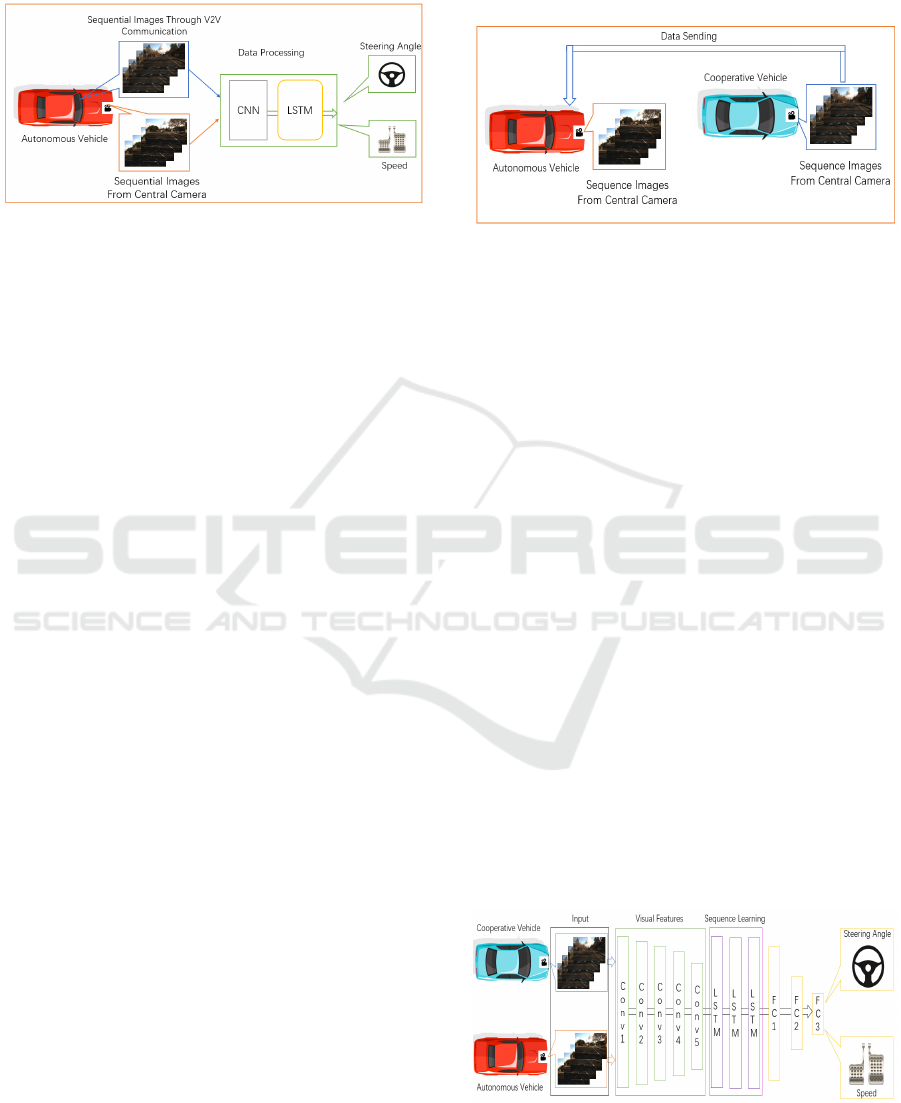
Figure 1: Overview of the V2V communication
Autonomous movement planning system. The red one is the
autonomous host vehicle with a front central camera. The
sequential images in the blue rectangle is collected through
V2V communication. The data processing part combines
two sets of data to control the autonomous vehicle
movement that are the steering angle and the speed.
3.2 Vehicle-to-Vehicle Communication
In recent years, the Vehicle-to-Vehicle (V2V)
communication has gained more and more attention.
With the development of the Fifth Generation (5G)
mobile communication system, we believe that the
V2V communication is a key technology to achieve
high-level autonomous driving. In order to make the
autonomous driving system work under 5G in the
near future, we try to establish an autonomous driving
system through V2V communication. Most of the
existing autonomous driving systems rely on the
sensor equipment to monitor the surrounding
environment. However, the powerful sensor
equipment would cost too much, and exceed the
budget eventually. More importantly, the
autonomous vehicle would never be isolated in the
environment especially in the urban scene. The
interaction with other vehicles should be also taken
into consideration.
In Figure 2, the host car is an autonomous vehicle
with a camera in the center. The central camera
captures the sequential images while driving.
Meantime, the cooperative vehicle is ahead of the
host autonomous vehicle, and also keeps capturing
the images through its own center camera. Under the
V2V communication, we assume that the cooperative
vehicle communicates with the host autonomous
vehicle by sending the driving state, which is speed,
steering angle, and the sequential images from the
central camera. The autonomous vehicle receives the
data from the cooperative vehicle and combine the
received data with the autonomous vehicle’s data, and
start to process the two sets of the data through a deep
neural network (DNN). In this paper, we assume the
autonomous vehicle and cooperative vehicle are away
from each other. The movement control using the
model indicated in (3) through V2V communication.
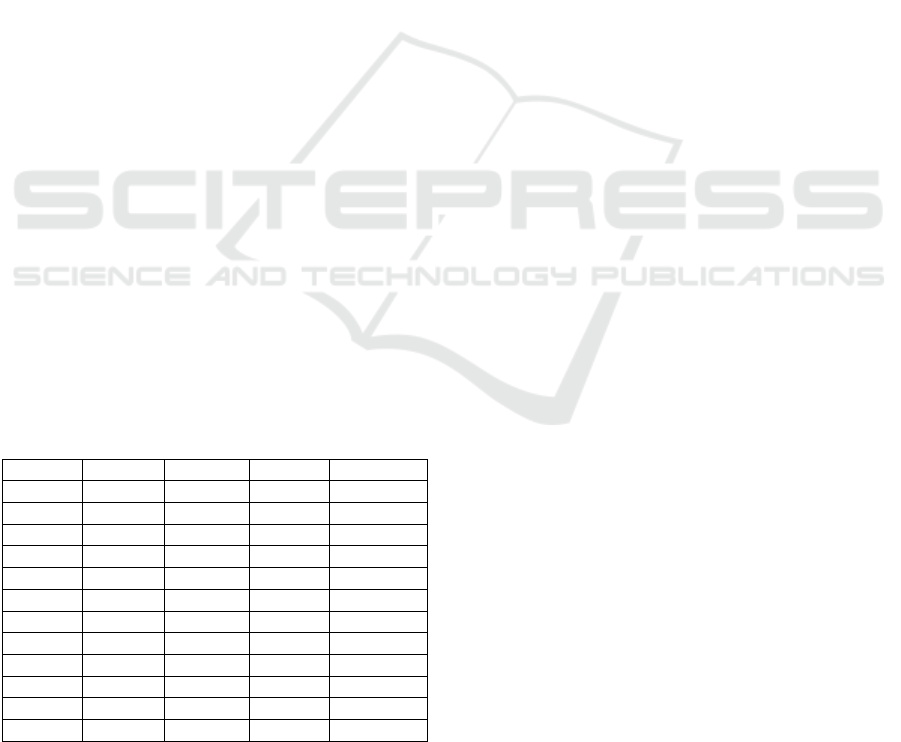
Figure 2: Overview of the V2V communication. The red
one is the autonomous host vehicle with a front central
camera. The blue one is the cooperative vehicle that also
collects the sequence images from the central camera. The
V2V communication allows the cooperative vehicle to send
the data back to the autonomous vehicle to help the
autonomous driving system make the movement control.
3.3 CNN-LSTM Architecture
The goal of the system is to learn the mapping from
two sets of image data to the autonomous vehicle
movement control. Both spatial and temporal
information would be used through the End-to-End
structure. The spatial information is the features
extracted by CNN from the input frames that are
obtained by the autonomous vehicle and the
cooperative vehicle. The temporal information comes
from the relationship between the sequential image
frames. In this paper, we propose a novel network
architecture that combines the CNN and LSTM
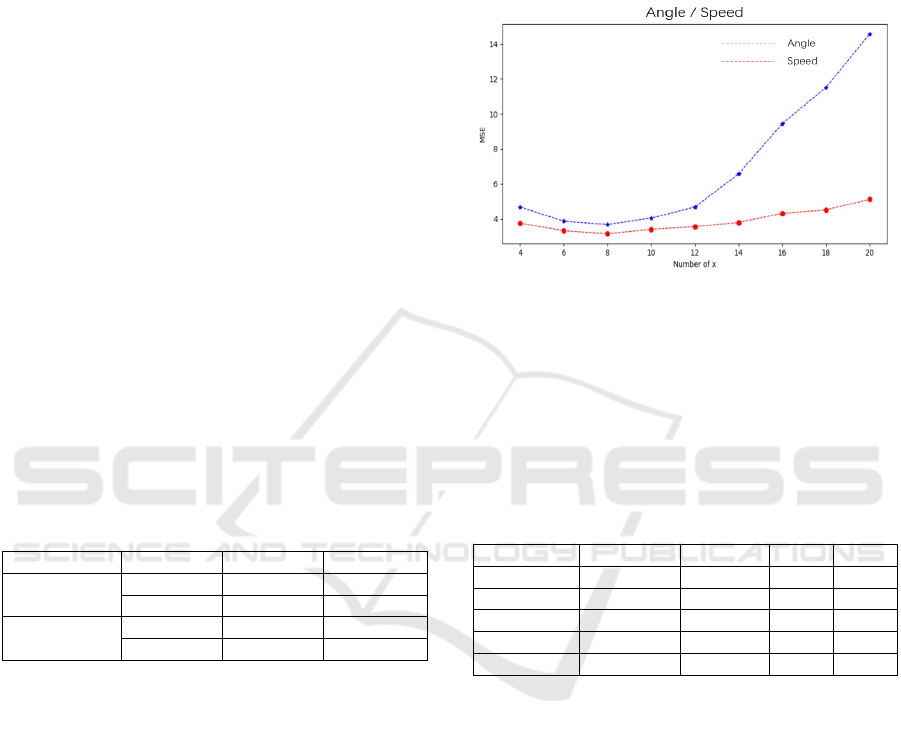
networks, as shown in Figure 3 We use the CNN
network to capture the feature from the input frames,
and use the LSTM network to fuse these features. The
recursive structure of LSTM can keep past
information for regression. The whole network can
take advantage of both spatial and temporal
information. We detail the CNN and LSTM networks
as follows.
Figure 3: The data processing flow of the system proposed
in this paper.
ICPRAM 2021 - 10th International Conference on Pattern Recognition Applications and Methods
380
CNN: CNN has been approved as the most efficient
and suitable way to solve traditional problems in the
computer vision field such as segmentation and scene
understanding. The key to train a network is the input
data, annotation, and network architecture. Our goal
is to find the best network architecture for feature
extraction. We want to keep as much as spatial
information through the convolution processing. To
the best of our knowledge, ResNet has been
demonstrated in many fields. In this work, we apply
the transfer learning. The whole CNN network is pre-
trained on the ImageNet dataset.
LSTM: To the best of our knowledge, the exiting
work only focuses on one input frame, which may
result in lack of temporal information of the whole
system. We believe that human manual driving
should also contain the drive motion history.
Therefore, we think the motion history state is also
important to train the network and make it stable.
Based on this idea, we apply the LSTM network to
capture the temporal information. LSTM is a well-
improved recurrent neural network by introducing
memory gates. LSTM avoids gradient vanishing and
is capable of learning long-term dependencies. In
recent years, LSTM has been demonstrated as a good
way in the prediction field. LSTM is widely used also
in the classification field.
As shown in Fig. 3, we place the LSTM network
after CNN. This placement allows the LSTM network
to fuse all the spatial features and the motion history
state into the current state. The final movement
control for autonomous vehicle is decided by its own
motion history state and the cooperative vehicle’s.
Table 1 shows the network architecture proposed in
this paper, where Conv represents the convolutional
layer.
Table 1: Proposed Network Architecture.
Layer Type Size Stride Activation
1 Conv1 5*5*24 5,4 ReLu
2 Conv2 5*5*32 3,2 ReLu
3 Conv3 5*5*48 5,4 ReLu
4 Conv4 5*5*64 1,1 ReLu
5 Conv5 5*5*128 1,2 ReLu
6 LSTM 64 - Tanh
7 LSTM 64 - Tanh
8 LSTM 64 - Tanh
9 FC 100 - ReLu
10 FC 50 - ReLu
11 FC 10 - ReLu
12 FC 2 - Linear
4 EXPERIMENTS
In this section, we explain the data setup and details
of our experiments.
4.1 Data Setup
In this paper, we apply the Udacity dataset for
experiments. The Udacity dataset has 223GB of
image frames and logs data from 70 minutes during
driving with the annotation of latitude, longitude,
gear, brake, throttle, steering angles, and speed. The
data were collected on two separate days, where one
day was sunny, and the other was overcast. The FPS
of each video data is 20Hz with a resolution of
640*480 pixels.
In this paper, the maximul speed of the
autonomous vehicle and the cooperative vehicle is
100km/h. The steering angle of the autonomous
vehicle and the cooperative vehicle ranges [-π/2, π/2].
The range in [-π/2, 0] is defined as to go left, and [0,
π/2] is defined as go right. We set a fault tolerance of
autonomous driving. The fault tolerance for the
steering angle is 4 degrees, and the fault tolerance for
acceleration is 4km/h.
4.2 Network Setup
After the data setup, we obtain the images data with
the corresponding annotation. For training the
autonomous driving model, we use a subset of the
data acquired from the Udacity dataset. Based on the
80/20 split policy, we split the data into 80-20
training-testing for our experiments. In the training
procedure, we set the learning rate as 0.0001 with
stochastic gradient descent (SGD). The momentum is
set to 0.99, with a batch size 16. We also apply the
dropout layer and batch normalization layer to let the
network avoid the overfitting problem. The input to
the CNN is images with the annotation. The output
from the CNN and the motion history state are the
input to the LSTM. In order to avoid the gradient
explosion of the LSTM, we set the gradient clip to 10.
The hidden unit number of the LSTM is set to 64. The
whole network outputs the next autonomous driving
movement control, which is the steering angle and
speed in continuous values.
5 RESULTS AND DISCUSSION
In this paper, we conducted the following five
experiments to evaluate our work.
Movement Control with Vehicle-to-Vehicle Communication by using End-to-End Deep Learning for Autonomous Driving
381

(1) We conduct experiments for evaluating the
validity of the V2V communication by
comparing the two cases: with and without a
cooperative car.
(2) We conduct experiments for finding the best
combination of the CNN-LSTM architecture by
applying three CNN architectures which is
Nvidia, Inveption-v3, and the ResNet-152.
(3) We conduct experiments for evaluating the
proposed CNN-LSTM system by comparing the
network with and without LSTM.
(4) We change the values for the parameter x, which
is for controlling the number of input frames so
that the x value that achieves the best
performance is found.
(5) We change the distance between the autonomous
and cooperative vehicles so that we can evaluate
how the distance influences the movement
control of the autonomous vehicle.
All the experiments use the mean absolute error
for the steering angle and speed (Eq. (3)) for
evaluation:
∑
|
|
. (3)
where
stands for the prediction, and the
stands
for the ground truth. The angle is in degree, and the
speed is in km/h. In the experiments, we try to
minimize the difference between the output and the
ground truth. However, we do not need the output to
be exactly the same as the ground truth. In other
words, the system can still perform well if there is
only a small error between the prediction and the
ground truth. Therefore, we set this small error as a
threshold to evaluate driving motion .
Predictions whose MSE are below the should be
considered as correct driving motions; otherwise,
wrong driving motions. We set parameter to
represent the correct driving motion, and to
represent the wrong driving motion. Then parameter
and can be calculated in Eq.(4) as
follows:
|
|
,
|
|
,
. (4)
Then, we define a system performance score as
in Eq.(5) to evaluate the system:
/. (5)
As mentioned earlier, we set the threshold of the
steering angle as 4 degrees, and the 4km/h for the
speed. If the driving motion control is decided every
half second, the physical error in the vehicle moving
direction is 0.399m and the vertical direction is
0.055m. It would cause no physical damage in the real
world.
5.1 Evaluation of V2V Communication
Here, we evaluate the influence of V2V
communication. In our opinion, the autonomous
vehicle is never isolated in the environment, and the
interaction with other vehicles would constantly
happen. We believe that the autonomous driving
system could perform better if it can get the data from
the cooperative vehicle. In order to confirm the
validity of our proposed system, we test the system
with and without the V2V communication and keep
the rest of the setting the same in the comparison
experiment. The results are shown in Table 2, which
lists the MSE and system performance score
for the steering angle and speed. The MSE of angle is
in degree, and the speed is in km/h.
The results indicate that the system performs
better with V2V communication. The MSE and
system performance score are both improved
by taking advantage of the data from the cooperative
car. This result implies that the V2V communication
can make the system more stable and accurate, which
is similar to humans’ manual driving: i.e., humans
keep attention to the frontal car.
Table 2: Performance of with and without V2V
communications.
Method Item MSE PESC
Without
V2V
Angle 10.73 60.8%
Speed 11.35 56.3%
With
V2V
Angle
3.69 84.2%
Speed
3.16 78.9%
Table 3: Performance of different CNN-LSTM
architectures.
CNN Item MSE PESC
Nvidia Angle 7.28 67.3%
Speed 10.89 61.1%
Inveption-v3 Angle 7.11 71.7%
Speed 4.68 73.5%
ResNet-152 Angle
3.69 84.2%
Speed
3.16
78.9%
5.2 Evaluation with Different CNN
Architectures
In our proposed CNN-LSTM architecture,
experiments compare different CNN’s. This
experiment implements three different CNN-LSTM
combination architectures: NVIDIA, Inception-v3,
ICPRAM 2021 - 10th International Conference on Pattern Recognition Applications and Methods
382
and ResNet-152 CNN architecture. Table 3 shows the
results, where MSE and system performance score
for the angle and speed for the three CNN’s are
listed.
Obviously, ResNet-LSTM architecture performs
the best among all the three architectures.
5.3 Evaluation of LSTM Architecture
This experiment evaluates how the LSTM
architecture, which processes the motion history state,
influences the autonomous driving. The experiments
compare the following two networks: ResNet-LSTM,
and the ResNet only (without LSTM). The results are
shown in Table 4, in which MSE and system
performance score for the angle and speed for
ResNet only and ResNet-LSTM are listed.
Obviously, the CNN-LSTM architecture
improves both MSE and system performance score
, which demonstrates that the motion history
state information does influence the future motion
state. Although the MSE for speed is not significantly
improved, the CNN-LSTM structure does improve
the system performance score , which means
that the future motion state prediction with the
historical information makes the whole system more
accurate and stable.
Table 4: Performance of architecture with or without
LSTM.
Architecture Item MSE PESC
ResNet only Angle 15.63 63.8%
Speed 9.89 74.1.%
ResNet-
LSTM
Angle
3.69 84.2%
Speed
9.27 78.9%
5.4 Evaluation of Sequential Image
Frame Inputs
In this experiment, we formulate the V2V
communication as follows. The autonomous vehicle
and cooperative vehicle are away from each other. At
time t, we assume the cooperative vehicle starts to
acquire sequential image and send them to the
autonomous vehicle. During this procedure, the
autonomous vehicle can collect x frames in total.
Combining the data from the autonomous vehicle, it
can obtain 2x frames as the input to the DNN.
The primary task is finding the optimal x for
autonomous driving through V2V communication. In
this experiment, we change the value of x, keeping
the other parameters constant. Since the FPS of the
Udacity dataset is 20, it means that the movement
control decision is made in every x/20 second.
Therefore,we set the x as
{2,4,6,8,10,12,14,16,18,20}, and find the x that
achieves the best performance among the above-
mentioned x values. The results are shown in Table 5,
in which MSE for the angle and speed for the different
x values are listed.
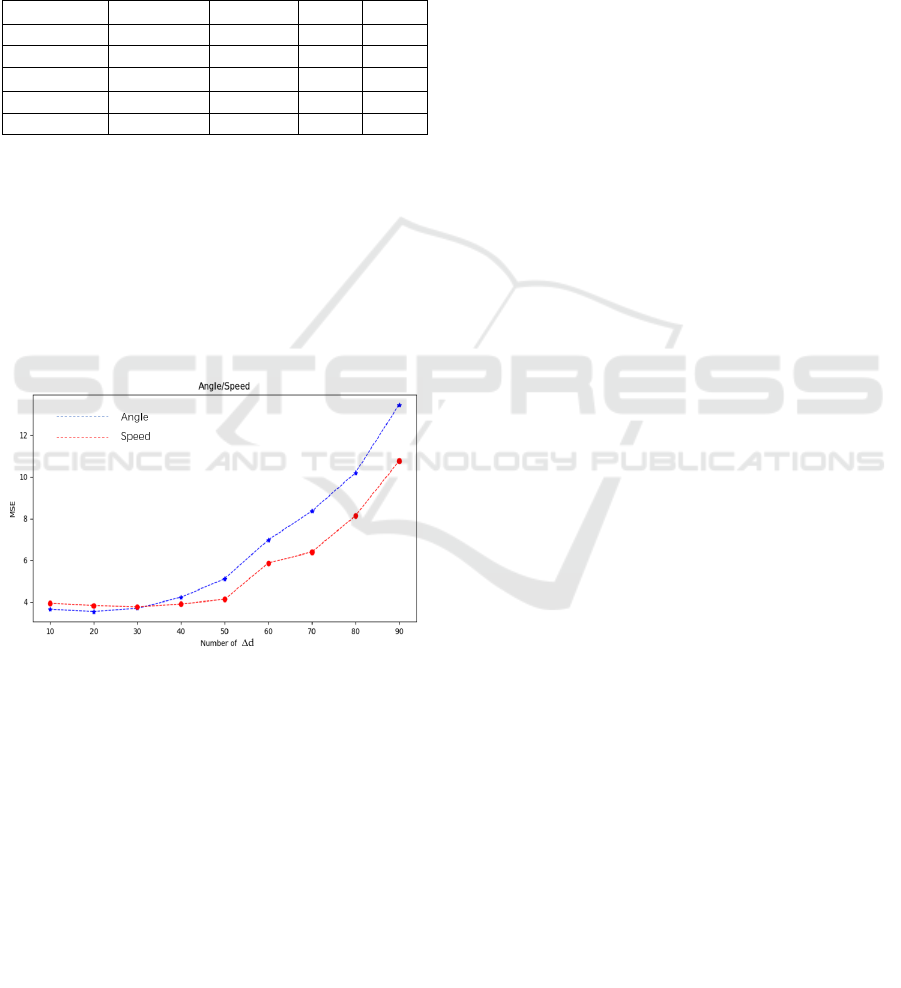
Figure 4: Performance with different parameter x.
Clearly, the number of input frames influence the
system performance significantly. In Fig. 3, we plot
the results shown in Table 5. According to Table 5
and Fig. 4, it turns out that x=8 gives the best
performance for both angle and speed which means
that the movement decision made in every 8/20 = 0.4s
can achieve the best performanve overall.
Table 5: The Performance with different parameter x.
X 4 6 8 10
Angle 4.68 3.87 3.69 4.05
Speed 3.76 3.32 3.16 3.40
X 12 14 16 18
Angle 4.68 6.57 9.45 11.52
Speed 3.56 3.80 4.32 4.52
5.5 Evaluation of Distance
As can be seen in the model described in Fig. 1 in
Section 3.2, there is a distance between the
autonomous vehicle and the cooperative vehicle in
the vehicle moving direction. Although V2V
communication could improve the performance of the
autonomous driving system, not all cooperative
vehicles could influence the autonomous vehicle
movement control. Same as human manual driving,
the interaction with the nearby vehicle has a larger
influence on the movement control. To verify the
distance influence, we set a distance gap parameter
∆. In this experiment, we find out how the distance
between the autonomous vehicle and the cooperative
vehicle could influence the autonomous vehicle
movement control.
Movement Control with Vehicle-to-Vehicle Communication by using End-to-End Deep Learning for Autonomous Driving
383
Similar to Section 5.4, we change the parameter
∆d, keeping the other parameters constant. In this
experiment, as described in Section 5.4, we set x as 8,
and try to find out how the ∆t would influence the
results. This experiment sets ∆d value every 10
between 0 and 90. We use the MSE of the angle and
speed to evaluate the influence of ∆d. Table 6 shows
the results and Fig. 5 plots all the results.
Table 6: Performance of different ∆d values.
∆d
10 20 30 40
Angle 3.64 3.53 3.69 4.22
Speed 3.94 3.83 3.76 3.90
∆d
50 60 70 80
Angle 5.11 6.97 8.35 10.19
Speed 4.12 5.86 6.39 8.13
In Fig. 5 we can see that the best performance is
achieved at ∆d =20. Moreover, Fig. 4 also shows that
MSE significantly increases when ∆d exceeds 40.
Therefore, we assume that ∆d between 10 and 40 has
the strongest influence on the autonomous vehicle.
Considering the current speed is nearly 20m/s, the
V2V communication works best when the distance
from the autonomous host vehicle to the cooperative
vehicle is between 10m to 40m.
Figure 5: Performance with different distance values.
6 CONCLUSIONS
In this paper, we have proposed a novel V2V
communication based autonomous vehicle driving
system that takes advantage of both spatial and
temporal information. The proposed system consists
of a novel combination of the CNN-LSTM networks
for controlling steering and speed based on the spatial
and temporal information obtained by the cameras
attached to the autonomous host vehicle and
cooperative vehicle.
To confirm the validity of the proposed system,
we conducted experiments for evaluating the MSE
and accuracy of the steering angle and car speed using
the Udacity dataset. Experimental results are
summarized as follows.
(1) By comparing the two cases: with and without a
cooperative vehicle, “with a cooperative vehicle”
outperforms “without”, which clarifies the
validity of the V2V communication.
(2) By comparing the networks with and without the
LSTM in the proposed system, it turns out that
“with” works better than “without”, which means
that historical motion information, which is
processed by the LSTM, is useful.
(3) To find the best CNN architecture in the
proposed system, three different CNN’s are
compared. Res-Net turns out to be the best
among the three.
(4) As a result of exploring the number of input
sequential frames, eight frames turn out to
achieve the best performance.
(5) As a result of exploring the distance between the
host and cooperative cars, ten to forty meters turn
out to achieve a robust result on the autonomous
driving movement control.
In the future, we may expand the V2V
communication working scenarios to combine it with
signals like traffic. Meanwhile, we would like to
improve the network learning ability and accuracy
and try to make the system work for more application
scenarios.
REFERENCES
Gibbs, S. (2017). Google sibling waymo launches fully
autonomous ride-hailing service. The Guardian, 7.
Wehner, M., Truby, R. L., Fitzgerald, D. J., Mosadegh, B.,
Whitesides, G. M., Lewis, J. A., & Wood, R. J. (2016).
An integrated design and fabrication strategy for
entirely soft, autonomous robots. Nature, 536(7617),
451-455.
Long, J., Shelhamer, E., & Darrell, T. (2015). Fully
convolutional networks for semantic segmentation.
In Proceedings of the IEEE conference on computer
vision and pattern recognition (pp. 3431-3440).
Lin, T. Y., Dollár, P., Girshick, R., He, K., Hariharan, B.,
& Belongie, S. (2017). Feature pyramid networks for
object detection. In Proceedings of the IEEE conference
on computer vision and pattern recognition (pp. 2117-
2125).
Toderici, G., Vincent, D., Johnston, N., Jin Hwang, S.,
Minnen, D., Shor, J., & Covell, M. (2017). Full
resolution image compression with recurrent neural
networks. In Proceedings of the IEEE Conference on
ICPRAM 2021 - 10th International Conference on Pattern Recognition Applications and Methods
384

Computer Vision and Pattern Recognition (pp. 5306-
5314).
Liu, J., Shahroudy, A., Xu, D., & Wang, G. (2016,
October). Spatio-temporal lstm with trust gates for 3d
human action recognition. In European conference on
computer vision (pp. 816-833). Springer, Cham.
Wang, Y., Huang, M., Zhu, X., & Zhao, L. (2016,
November). Attention-based LSTM for aspect-level
sentiment classification. In Proceedings of the 2016
conference on empirical methods in natural language
processing (pp. 606-615).
Goodfellow, I., Bengio, Y., Courville, A., & Bengio, Y.
(2016). Deep learning (Vol. 1, No. 2). Cambridge: MIT
press.
Wang, X., Jiang, R., Li, L., Lin, Y., Zheng, X., & Wang, F.
Y. (2017). Capturing car-following behaviors by deep
learning. IEEE Transactions on Intelligent
Transportation Systems, 19(3), 910-920.
Zhang, L., Lin, L., Liang, X., & He, K. (2016, October). Is
faster R-CNN doing well for pedestrian detection?. In
European conference on computer vision (pp. 443-457).
Springer, Cham.
Li, X., Ma, H., Wang, X., & Zhang, X. (2017). Traffic light
recognition for complex scene with fusion detections.
IEEE Transactions on Intelligent Transportation
Systems, 19(1), 199-208.
Cordts, M., Omran, M., Ramos, S., Rehfeld, T., Enzweiler,
M., Benenson, R., ... & Schiele, B. (2016). The
cityscapes dataset for semantic urban scene
understanding. In Proceedings of the IEEE conference
on computer vision and pattern recognition (pp. 3213-
3223).
Gebru, T., Krause, J., Wang, Y., Chen, D., Deng, J., & Fei-
Fei, L. (2017). Fine-grained car detection for visual
census estimation. arXiv preprint arXiv:1709.02480.
Pomerleau, D. A. (1989). Alvinn: An autonomous land
vehicle in a neural network. In Advances in neural
information processing systems (pp. 305-313).
LeCun, Y., Bengio, Y., & Hinton, G. Deep learning.” nature
521.7553 (2015): 436. DOI:
https://doi.org/10.1038/nature14539
Bojarski, M., Del Testa, D., Dworakowski, D., Firner, B.,
Flepp, B., Goyal, P., ... & Zhang, X. (2016). End to end
learning for self-driving cars. arXiv preprint
arXiv:1604.07316.
Szegedy, C., Ioffe, S., Vanhoucke, V., & Alemi, A. (2016).
Inception-v4, inception-resnet and the impact of
residual connections on learning. arXiv preprint
arXiv:1602.07261.
Pan, S. J., & Yang, Q. (2009). A survey on transfer
learning. IEEE Transactions on knowledge and data
engineering, 22(10), 1345-1359.
Deng, J., Dong, W., Socher, R., Li, L. J., Li, K., & Fei-Fei,
L. (2009, June). Imagenet: A large-scale hierarchical
image database. In 2009 IEEE conference on computer
vision and pattern recognition (pp. 248-255). Ieee.
Gers, F. A., Schmidhuber, J., & Cummins, F. (1999).
Learning to forget: Continual prediction with LSTM.
Carvalho, A., Lefévre, S., Schildbach, G., Kong, J., &
Borrelli, F. (2015). Automated driving: The role of
forecasts and uncertainty—A control perspective.
European Journal of Control, 24, 14-32.
Greff, K., Srivastava, R. K., Koutník, J., Steunebrink, B. R.,
& Schmidhuber, J. (2016). LSTM: A search space
odyssey. IEEE transactions on neural networks and
learning systems, 28(10), 2222-2232.
Cho, H., Seo, Y. W., Kumar, B. V., & Rajkumar, R. R.
(2014, May). A multi-sensor fusion system for moving
object detection and tracking in urban driving
environments. In 2014 IEEE International Conference
on Robotics and Automation (ICRA) (pp. 1836-1843).
IEEE.
Wei, J., Snider, J. M., Kim, J., Dolan, J. M., Rajkumar, R.,
& Litkouhi, B. (2013, June). Towards a viable
autonomous driving research platform. In 2013 IEEE
Intelligent Vehicles Symposium (IV) (pp. 763-770).
IEEE.
Mei, J., Zheng, K., Zhao, L., Teng, Y., & Wang, X. (2018).
A latency and reliability guaranteed resource allocation
scheme for LTE V2V communication systems. IEEE
Transactions on Wireless Communications, 17(6),
3850-3860.
Andrews, J. G., Buzzi, S., Choi, W., Hanly, S. V., Lozano,
A., Soong, A. C., & Zhang, J. C. (2014). What will 5G
be?. IEEE Journal on selected areas in
communications, 32(6), 1065-1082.
Olson, E., Strom, J., Goeddel, R., Morton, R., Ranganathan,
P., & Richardson, A. (2013). Exploration and mapping
with autonomous robot teams. Communications of the
ACM, 56(3), 62-70.
Eckelmann, S., Trautmann, T., Ußler, H., Reichelt, B., &
Michler, O. (2017). V2v-communication, lidar system
and positioning sensors for future fusion algorithms in
connected vehicles. Transportation Research Procedia,
27, 69-76.
Khabbaz, M., Hasna, M., Assi, C. M., & Ghrayeb, A.
(2014). Modeling and analysis of an infrastructure
service request queue in multichannel v2i
communications. IEEE Transactions on Intelligent
Transportation Systems, 15(3), 1155-1167.
Movement Control with Vehicle-to-Vehicle Communication by using End-to-End Deep Learning for Autonomous Driving
385
