
Training an Agent to Find and Reach an Object in Different
Environments using Visual Reinforcement Learning
and Transfer Learning
Evelyn Conceição Santos Batista
1
, Wouter Caarls
1
, Leonardo A. Forero
2
and Marco Aurélio C. Pacheco
1
1
Pontifícia Universidade Católica do Rio de Janeiro (PUC-Rio), Rio de Janeiro, Brazil
2
Universidade do Estado do Rio de Janeiro (UERJ), Rio de Janeiro, Brazil
Keywords: Autonomous Agent, Transfer Learning, Reinforcement Learning, Deep Learning, Vizdoom, DQN.
Abstract: This paper consists of a study on deep learning by visual reinforcement for autonomous robots through
transfer learning techniques. The simulation environments tested in this study are realistic environments
where the challenge of the robot was to learn and transfer knowledge in different contexts, taking advantage
of the experience of previous environments in future environments. This type of approach, besides adding
knowledge to autonomous robots, reduces the number of training epochs for the algorithm even in complex
environments, justifying the use of transfer learning techniques.
1 INTRODUCTION
The learning process of autonomous agents is a field
of research increasingly developed and explored
because of the constant improvements in
sophisticated algorithms and specialized hardware
(Day et al., 2015), (Miyahara, 2017), (Szegedy et al.,
2015). These improvements have contributed to the
development of applications in the area of
autonomous simulation, which include autonomous
cars (Nguyen et al., 2018), (Bisht et al., 2017), aerial
and marine autonomous vehicles (Meggitt et al.,
2016), (Chen et al., 2018), and autonomous robots
(Ravindran et al., 2018), (Ly et al., 2015). In each of
these cases, techniques are studied to allow robots to
acquire innovative abilities or to adapt to an
environment through learning algorithms, making it
possible for them to constantly learn and develop new
abilities for different purposes (Naik et al., 2016)
(Alberri et al., 2018).
In this context, an autonomous robot must interact
with its environment to achieve its goals. It must be
capable of gathering information about its
environment, making decisions based on this
information and initiating a specific action based on
those decisions.
In recent years, there has been a need for more
autonomous robotic systems in several areas. More
specifically, there has been a need for robots to develop
the ability to make decisions without human
interference in order to better achieve pre-established
goals. Because of that, most research tends to focus on
developing applications that give autonomy to robots,
as the agents recognize the environment through
sensors and act independently in those environments
through actuators. The autonomous system allows
robots to make decisions quickly, taking into
consideration the diverse variables of an environment.
Consequently, the system has several applications,
such as in autonomous cars, intelligent drones, and
robots with agrarian or safety applications.
With that in mind, the objective of this paper is to
simulate autonomous robots in complex
environments in order to develop their autonomy
further and raise the level of complexity of their tasks.
In order to do so, a visual reinforcement technique,
known as deep reinforcement learning, is used.
Because it is very difficult to train an automaton in
the real world, this works aims at performing
simulations so that the agent does not have to learn
everything in a real environment. In addition, transfer
learning is used in order to allow the transference of
the simulated learning to the real world.
This paper is organized as follows: Section 2
describes the concepts of Reinforcement Learning
and Deep Q-networks. Section 3 presents the
732
Batista, E., Caarls, W., Forero, L. and Pacheco, M.
Training an Agent to Find and Reach an Object in Different Environments using Visual Reinforcement Learning and Transfer Learning.
DOI: 10.5220/0010236807320741
In Proceedings of the 13th International Conference on Agents and Artificial Intelligence (ICAART 2021) - Volume 2, pages 732-741
ISBN: 978-989-758-484-8
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

architecture implemented, introduce the
environments and the proposed method. Section 4 is
the results obtained and finally in section 5 we talk
about the conclusions and future implementations.
2 THEORETICAL
BACKGROUND
2.1 Autonomous Agent
Agent-based processing can be characterized by an
input state which produces an output after being
processed. The input state is determined by the
environment in which the agent acts and the output is
determined by the effects caused by the agent in the
environment. Despite the various similarities between
agent theory and control theory, agents are best
applied to specific situations which demand
autonomy and intelligence, such as complex and
dynamic environments.
2.2 Q-Learning
Q-Learning (Watkins and Dayan, 1992) is a
reinforcement learning algorithm (Sutton and Barto,
1998), which learns the value of state-action pairs. In
it, the state-action value function
, must be
estimated for the policy , for all states s, and for
actions a. This algorithm is defined mainly by the
updates of the function shown in equation 1.
,
←
,
,
,
(1)
In which an agent in time t, situated in state
∈
, appoints one of the possible actions,
∈
, in
a state according to the selection policy (-greedy
(Sarkar et al., 1994)). Equation 1 updates the
evaluation function for this state-action pair
considering the value of the obtained reward,
and
the max evaluation function for all possible actions in
future state s. In order to do so, the discount factor
is used. This factor determines how the reinforcement
learning agent’s future reward will impact the
immediate reward. In addition, the learning rate α
defines the extent to which newly acquired
information replaces old information.
The goal of the Q-Learning algorithm is to
estimate the Q function for all visited states and taken
actions, recording it in a table. For each action taken,
a reward (r) will be awarded - which can be
favourable or not - so that on subsequent visits to the
same state (s), the most appropriate action can be
determined.
2.3 Deep Q-Networks (DQN)
As previously explained, Q-Learning uses a table to
represent the Q function. This allows for a precise
representation of the value of the long-term rewards,
which can be obtained in every state for each of the
actions available. However, this representation also
presents a very important problem: increasing the
complexity of the state also increases the size of the
Q table exponentially.
In order to create a model capable of solving a
complex problem while guaranteeing that the size of
the Q table is still able to be stored in memory a
function approximator is required. In order to do so,
we use an approximation of the Q function using the
neural network employed in 2013 by the DeepMind
team in the project Playing Atari with Deep
Reinforcement Learning (Mnih et al., 2013).
In order to use Deep Q-Learning, it is first
necessary to initialize a replay memory (Mnih et al.,
2013), which stores previous transitions, and
initialize the Q function with random weights. For
each epoch, a state is initialized. The state consists of
a sequence of images taken from the simulator and
preprocessed. For each step an action is chosen in
accordance to a greedy policy. Then, the action is
executed in the simulator and the reward is obtained,
along with the next image. The image is processed
and integrated into the state. The transitions are stored
in the replay memory and a mini-batch of transitions
is chosen from that memory. The mini-batch is used
to calculate a future reward and a neural network is
used to estimate the Q reward.
2.4 Transfer Learning
Transfer learning implies the reuse of a pre-trained
model to solve a new problem, that is, the use of a
trained neural network on another set of data, usually
bigger and more complex, to solve a new problem.
The only trained layer is the added one. Therefore,
in order to save training time, the output layer of the
last trained layer is calculated for all training images.
This output vector is known as bottleneck features.
When training the network, the bottleneck features
are passed on to the added layers, which are trained
normally. Consequently, the training is faster and
usually has good results.
Since Deep Q-Learning algorithms require great
computational power to be trained, Transfer Learning
techniques are used to decrease the training time and
processing for agents. Accordingly, Transfer
Learning is used throughout this study in order to
reduce the time spent on training without
Training an Agent to Find and Reach an Object in Different Environments using Visual Reinforcement Learning and Transfer Learning
733

compromising the results. Some examples of Transfer
Learning in Deep reinforcement learning can be seen
in (Asawa et al., 2017), (Yin and Pan, 2017),
(Parisotto et al., 2015).
3 PROPOSED METHOD
In accordance with this study’s objective, many
environments were created in order to test the
learning capabilities of autonomous robots using
transfer learning techniques in simple and complex
environments. Additionally, many scenarios were
created in order to investigate the transfer learning in
DQNs.
3.1 Environments Developed through
the Game Doom
Figure 1: Doom Environments (A: environment with the
task of collecting spheres, B: environment with barriers, C:
environment with the task of colecting a box, D:
environment with non-segmented doors, and E:
environment with segmented doors).
Some environments were developed in the Doom
game setting using API ViZDoom (Kempka et al.,
2016) and the open source Doom editor, Slade 3
(Slade 3). The API from ViZDoom gives direct
access to the ZDoom game engine (Zdoom), which
allows to send commands to the game agent
synchronously and to receive input from the current
state of the game. The interaction with the Doom
game engine was done using ACS scripts within the
Doom editor to calculate rewards for all scenarios.
The Doom environment (Figure 1) was used on
the first batch of tests. In this case, four scenarios with
different difficulty levels were created. In the first
scenario, the agent had to find and collect a sphere
(Figure 1.A). In the second scenario (Figure 1.B), the
agent had to go through a path with a barrier in order
to find and collect the sphere. In the third scenario,
the agent had to retrieve a box (Medkit) (Figure 1.C).
The fourth scenario included non-segmented doors
(Figure 1.D) and the agent had to locate a door.
Lastly, the fifth scenario had segmented doors (Figure
1.E) and the agent had to locate the correct door
amongst three existing ones.
3.2 Unreal Environment
Apart from ZDoom, this study included a platform for
creating games called Unreal (Zhong et al., 2017).
The template Realistic Rendering (Abadi et al., 2016)
was taken from Unreal. This simulator was chosen
because its images resembled reality (Figure 2) and
fit with the objective of increasing the level of
complexity for every environment created for the
tests, along with including obstacles such as tables
and plants. In this scenario, there are three doors and
the agent must choose between them in order to reach
the correct one.
Figure 2: Unreal Environment - Realistic Rendering.
3.3 Reward Value
The reward values for the environments of object
collection are 100 on reaching the goal and -1 for each
step taken to reach the destination. Meanwhile, the
rewards for the navigation environments are 200 if
the agent finds the door and -10 in case of collisions
with the wall.
3.4 The Architecture of the Network
Chosen
For simpler environments such as Doom, a neural
network model was created through Tensorflow [24]
and used as base. The model was slightly modified. It
is a simple model, with 2 convolutional layers and 2
full connected, as shown in Figure 3 and Table 1.
Figure 3: Neural network architecture used in VizDoom
training environments.
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
734

Table 1: Neural network architecture used in VizDoom
training environments.
Layer
Output
Kernel
size
Stride Activation
Conv2d
8
(6,6) (3,3) ReLU
Conv2d
16 (3,3) (2,2) ReLU
Fully
Connected
128
ReLU
Fully
Connected
8
The hyperparameters used in the training of the
environments created with the use of ZDoom are
shown in Table 12.
Table 2: Doom Hyperparameters.
Hyperparameters
Values
Epochs
100
steps per epoch
2000
batch size
128
discount rate
0.99
learning rate
0.0002
replay memory size
10000
test episodes per epoch
20
For the Realistic Rendering environments, a
deeper network (Figure 4 and Table 3) was used. This
choice was made because the environment was more
complex than the ones created through ZDoom. It
presented a texture with more details and more
objects scattered around, making it difficult for the
agent to navigate to the goal.
Figure 4: Neural network architecture used in Unreal
training environments.
Table 3: Neural network architecture used in Unreal
training environments.
Layer
Output
Kernel size Stride Activation
Conv2d
8
(6,6) (3,3) ReLU
Conv2d
16 (3,3) (2,2) ReLU
Conv2d
32 (6,6) (2,2) ReLU
Conv2d
64 (6,6) (2,2) ReLU
Fully
Connected
128
ReLU
Fully
Connected
8
The hyperparameters used in the training are
shown in Table 4.
Table 4: Unreal Hyperparameters.
Hyperparameters
Values
Epochs
8000
steps per epoch
2000
batch size
128
discount rate
0.95
learning rate
0.0001
replay memory size
10000
test episodes per epoch
20
3.5 Training Summary
The objective of this work was to make an automaton
learn to navigate through an unknown environment.
In order to do so, a neural network was trained. The
network input, described above, only required 4
frames (Mnih et al., 2013). Each frame needed a
preprocessing before it was given as input to the
neural network. The preprocessing environment
created with ZDoom required a resizing of each
image to (30, 45), a grayscale, and a normalization.
The environments created with Unreal were
semantically segmented before they were resized.
The segmentation was necessary because the
previously trained network learned from images of a
segmented environment. Consequently, images from
the Realistic Rendering environment should look like
the images previously trained. In some trainings,
transfer learning is used to avoid reworking and
retraining of already trained weights. After
preprocessing the images, they are given as input to
the network that was previously described. Through
this process, the agent is trained.
3.6 Graphics Creation
The graphs were designed to display the results of
each epoch as follows: 1) each epoch can consist of
multiple episodes; 2) an epoch has a maximum of
2000 steps and the agent must reach his goal within
this limit of steps; 3) each time a goal is reached, an
episode is completed; 4) an epoch can be equal to one
episode if the agent does not reach the goal during the
2000 steps.
Considering the stochasticity of the algorithm, the
same experiment was run 10 times and the average
rewards accumulated in each epoch were made. To
obtain the average of each epoch, the accumulated
rewards of each episode within an epoch were
averaged.
Training an Agent to Find and Reach an Object in Different Environments using Visual Reinforcement Learning and Transfer Learning
735
4 RESULTS
The results of the training are reported below.
The experiments were separated as follows:
Best initialization for the agent and the object;
Transfer learning to new tasks by testing layer
cutting for transfer learning;
Transfer learning to a new environment;
Transfer learning for environments with different
textures;
Transfer learning from a simple environment to a
complex one.
4.1 Best Initialization for the Agent
and the Object
In this experiment, the environment with the
objective of collecting spheres (Figure 1.A) was used
to train the agent. Some changes were made in the
agent’s and the sphere’s initialization An example
would be making the agent start the simulation in a
fixed place and the sphere in different locations or
having the sphere and the agent start in the fixed
places. The results show that these different types of
initialization affect the results of the agent’s training.
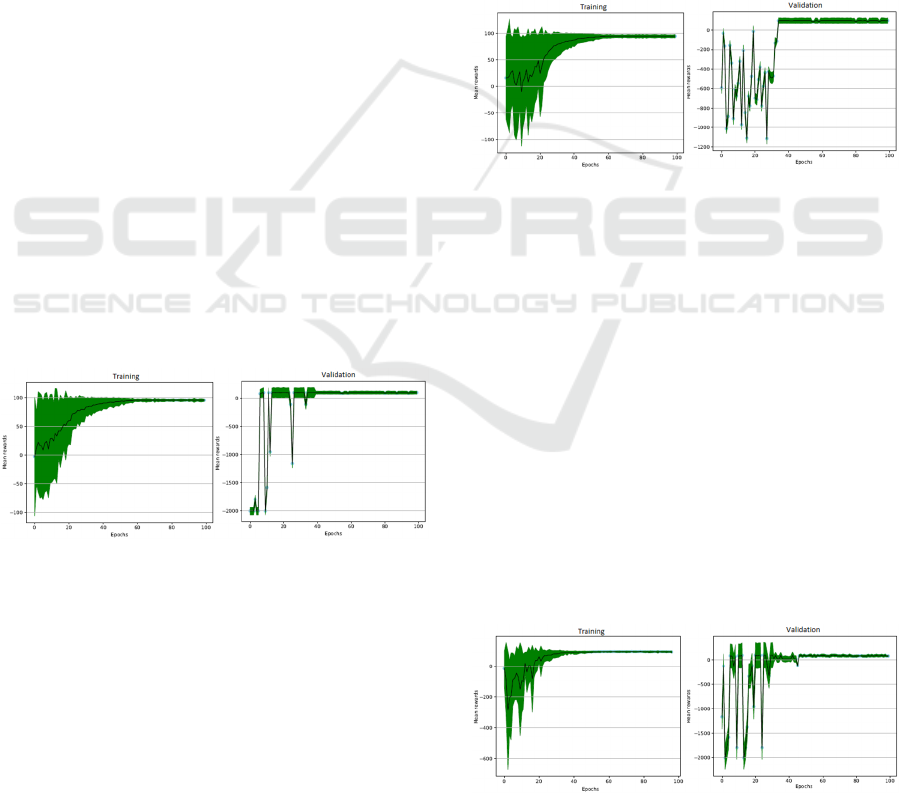
4.1.1 Starting the Simulation with the Agent
and the Sphere in Fixed Positions
In this environment, the agent and the object were
created in the same position for all episodes. The
results are shown in Figure 5 and Table 5.
Figure 5: Training results for agent and object initialization
in fixed positions.
The agent learned to reach the objective within
approximately 30 epochs. It is important to notice that
the reward difference between Figure 1.A and Figure
1.B occurs because, once the validation takes place,
the agent has to execute up to 2000 steps. If it does
not reach the objective, the 2000 steps take place. If it
reaches the objective, less steps are given, and the
reward is greater. The idea was to transfer from fixed
to random positions. However, random positions
learns faster than fixed positions, so therefore it does
not make sense to try to transfer
4.1.2 Starting the Simulation with the Agent
in a Fixed Position and the Sphere in
Random Positions
In this experiment, the agent was placed in a fixed
position and the sphere in random positions so that
the model could gain a greater generalization
capacity.
The results obtained in this case were better than
the ones achieved through the fixed agent and sphere
initialization, since this experiment generalized
learning at practically the same training time and
number of epochs (30), as seen in Table 5 and Figure
6.
Figure 6: Result of the start training for the agent in a fixed
position and for the object in random positions.
4.1.3 Starting the Simulation with the Agent
and the Sphere in Random Positions
Finally, an environment with random initialization of
the agent and objective was trained. This environment
presented the highest capacity to generalize the
model, as the agent was able to reach the objective
anywhere it was placed. In addition, it was concluded
that this was the best initialization due to the epoch
difference needed for the agent to learn. Even though
the results were similar, the agent's learning was
generalized to find a sphere from any position. The
difference between the two first experiments
performed previously was small, since approximately
40 epochs were needed for the agent to learn in this
experiment, as shown by Figure 7 and Table 5.
Figure 7: Result of agent and object initialization training at
random positions.
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
736
The next tests used the simulation initializations
considered the best. In other words, they used random
agents and targets.
Table 5: Best Agent and Goal Initialization Test Results.
Model
Rise
Time
(s)
Mean
Final
Train
Std.
Final
Train
Mean
Train
Std.
Train
Mean
Val.
Std.
Val.
Fixed
agent
and
enviro
nment
13.26 95.37 2.60 78.45 21.19 -176.2 71.7
Rando
m
Target
Fixed
Agent
13.60 94.46 2.95 74.56 24.67 -93.98 47.86
Rando
m
Target
and
Agent
18.02 94.43 5.93 56.49 45.53 -115.2 99.94
4.2 Transfer Learning to New Tasks by
Testing Layer Cutting for Transfer
Learning
In order to test the robustness of transfer learning, the
target object was modified, verifying if the training
results would be similar. In this case, an environment
containing a (“medikit”) box as its objective (Figure
1.C) was used.
This environment was trained without the use of
transfer learning, obtaining results (Table 6) which
proved to be similar to the scenario which had the
sphere as its objective. However, it had the longest
rise time, taking up to 45 epochs to be trained, since
the box is smaller than the sphere and, due to its color,
does not stand out in the environment.
Table 6: Results of agent training in the box-picking
environment.
Model
Rise
Time
(s)
Mean
Final
Train
Std.
Final
Train
Mean
Train
Std.
Train
Mean
Val.
Std.
Val.
Box
without
TL
21.42 90.16 11.47 11.56 87.50 -514.0 218.5
Different tests were performed to test the transfer
learning. In the first test, the trained net could have its
weights updated. In the second test, the weights of the
two convolutive layers were fixed. In the third test,
only the weights of the first convolutive layer were
fixed, that is, the weights were not retrained. All
experiments used an environment-trained network as
a pre-trained network. That was done in order to
retrieve spheres so that the environment could be
trained. The goal of the environment, in this case, was
to reach the box, as mentioned previously.
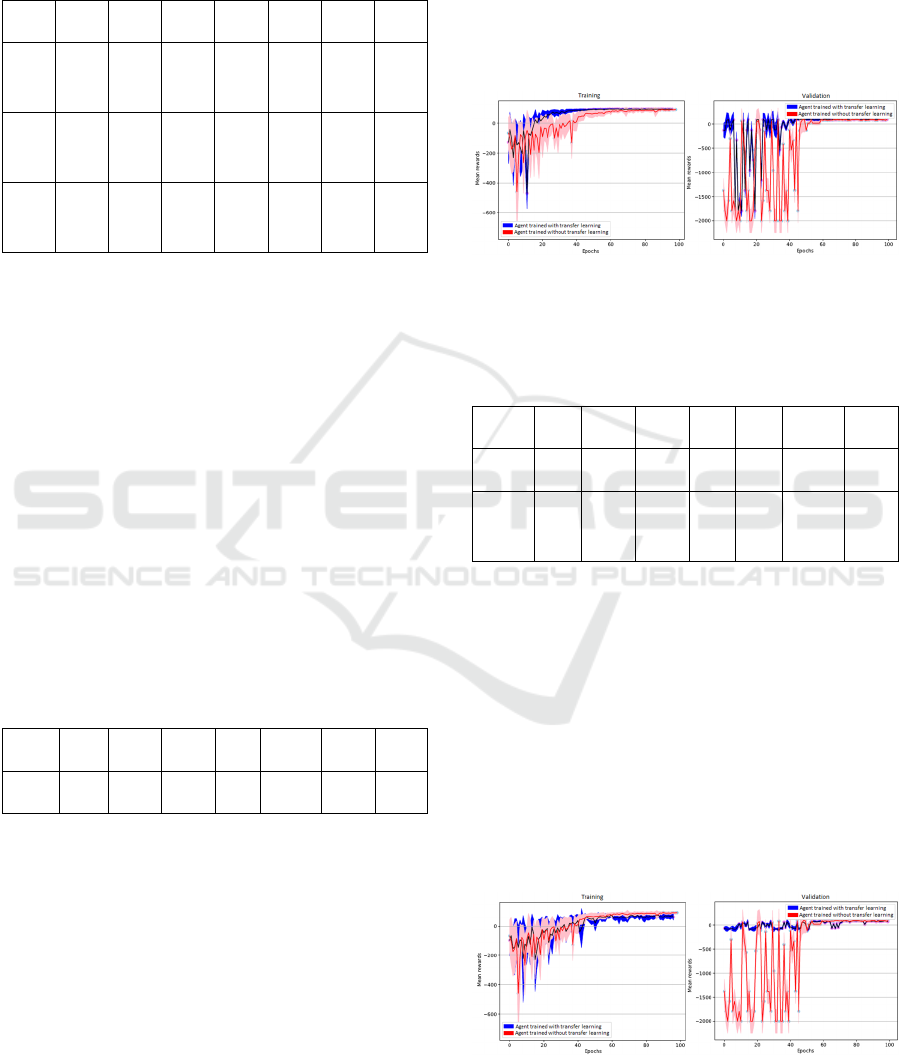
4.2.1 Training Which Combined All the
Network Weights Previously Trained
In this experiment, all net weights were reused and
none were fixed. The greatest difference shown by the
results was in the validation, as the agent already has
some knowledge prior to the training and received
greater rewards once the training process began. This
is shown by Table 7 and Figure 8.
Figure 8: Results of the training which combined all the
network weights previously trained.
Table 7: Table with a comparison between the presence and
absence of transfer learning in the training which combines
all transfer weights previously trained.
Model
Rise
Time
(s)
Mean
Final
Train
Std.
Final
Train
Mean
Train
Std.
Train
Mean
Val.
Std.
Val.
Box
without
TL
21.42 90.16 11.47 11.56 87.50 -514.06 218.59
Box with
TL of
sphere
environ-
ment
18.02 91.25 5.59 48.51 47.05 -52.04 110.24
4.2.2 Applying Transfer Learning to Two
Convolutional Layers with Fixed
Weight
In this experiment, only the weights of the fully
connected layers were adjusted, that is, no new frame
elements were used during the training, as all
convolutional layers had their weights fixed and
could not be trained again. As the environments were
practically the same - the only change was the goal
(sphere - box) - the results exceeded the baseline even
without training the convolutional layers, as seen by
Table 8 and Figure 9.
Figure 9: Training output using two-layer convolutional
transfer learning with fixed weights.
Training an Agent to Find and Reach an Object in Different Environments using Visual Reinforcement Learning and Transfer Learning
737
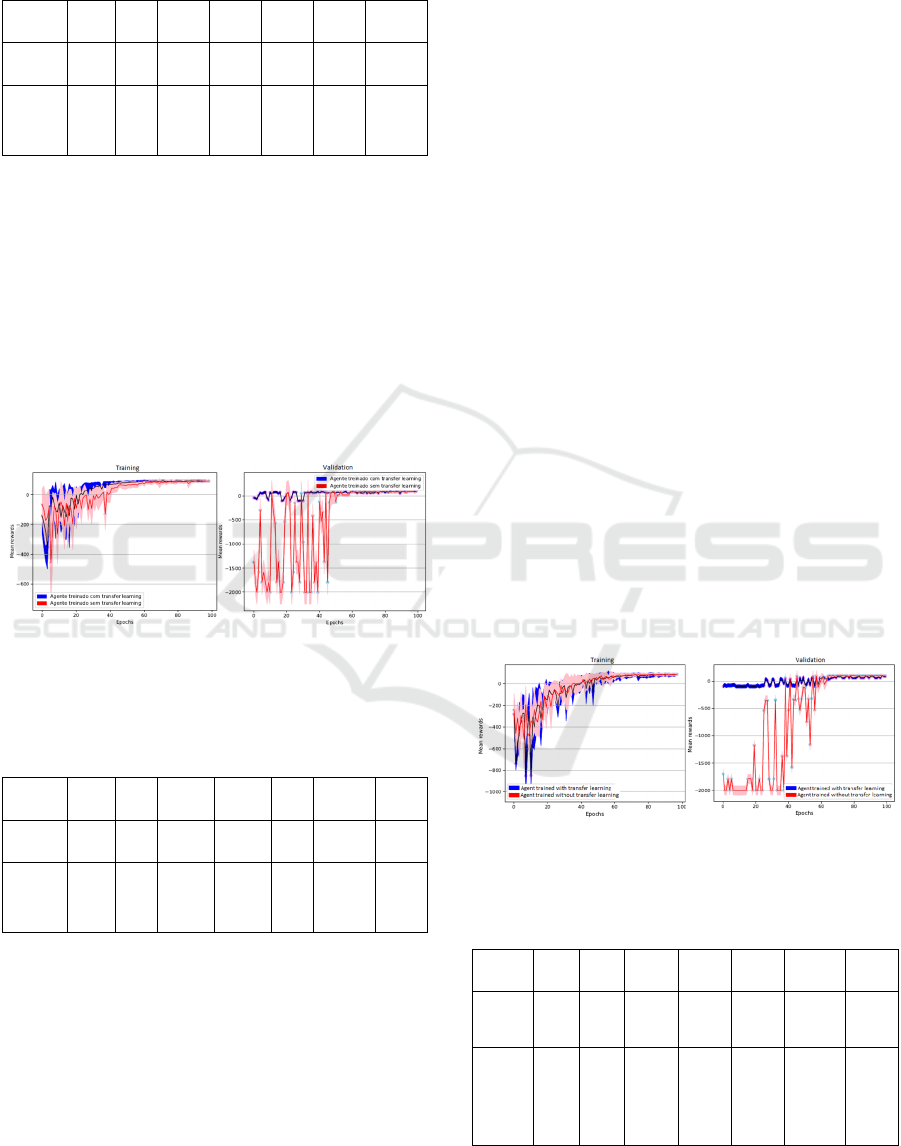
Table 8: Comparison table showing the use of transfer
learning in the training using two fixed weight
convolutional layers.
Model
Rise
Time
(s)
Mean
Final
Train
Std.
Final
Train
Mean
Train
Std.
Train
Mean
Val.
Std.
Val.
Box
without
TL
21.42 90.16 11.47 11.56 87.50 -514.0 218.59
Box with
TL of
sphere
environ-
ment
21.76 67.29 30.28 7.23 95.24 13.81 24.95
4.2.3 Using Transfer Learning in the First
Convolutional Layer with Fixed
Weights
The last experiment was trained using the first
convolutional layer of the transfer learning. The
results obtained were better than those of the previous
experiment (Table 7 and Table 8), although the rise
time did not present a significant difference. Overall,
the results of the training with transfer learning were
better than those without transfer learning, as shown
by Table 9 and Figure 10.
Figure 10: Results of the training with transfer learning
using the first convolutional layer with fixed weights.
Table 9: Comparison table of the training with and without
transfer learning, using the first convolutional layer with
fixed weights.
Model
Rise
Time
(s)
Mean
Final
Train
Std.
Final
Train
Mean
Train
Std.
Train
Mean
Val.
Std.
Val.
Box
without
TL
21.42 90.16 11.47 11.56 87.50 -514.06 218.59
Box with
TL of
sphere
environ-
ment
13.26 92.62 5.67 35.38 64.43 52.04 16.52
Upon analyzing the results, it was concluded that
the first layer with fixed weights was the best
parameterization method when it came to the use of
transfer learning in the experiments. After all, the
results produced by it were better because less epochs
were required for the agent to be trained.
4.3 Using Transfer Learning in a New
Environment
Given the previous results, obstacles were inserted in
the environment to make it more complex. Instead of
now changing the target, we change the environment
instead. The scenery chosen was similar to the one
used in previous experiments. The only difference
was that a barrier was placed between the agent and
the object (Figure 1.B).
The environment was initially trained without
transfer learning in order to allow a comparison
between results with and without transfer learning.
The results shown by the network were as
expected. The level of complexity of the environment
increased; therefore, the agent took longer to learn
how to reach the target. It needed approximately 72
epochs in order to succeed, as shown by Table 10 and
Figure 11.
The agent was trained once more using transfer
learning by applying the weights of the trained net in
the environment with the objective of collecting
spheres (Figure 1.A).
The results shown by the training with transfer
learning were better than those without transfer
learning. The rise time was smaller, and the averages
of the validation rewards were higher. It is important
to mention that, although the agent learns faster with
transfer learning, the final rewards were slightly
lower as the weights of the first convolution layer
were fixed.
Figure 11: Training results of the new environment using
transfer learning.
Table 10: Comparison table of the results shown by the new
environment with and without transfer learning.
Model
Rise
Time
(s)
Mean
Final
Train
Std.
Final
Train
Mean
Train
Std.
Train
Mean
Val.
Std.
Val.
Sphere /
Barrier
without
TL
24.14 85.06 17.34 -38.75 114.13 -715.76 100.59
Sphere /
Barrier
with TL
of
Sphere
Environ
-ment
20.10 81.94 23.34 -55.05 118.88 -5.2 39.63
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
738
4.4 Using Transfer Learning in
Environments with Different
Textures
In order to prepare the tests for the simulated real
environment, environments with significant
differences between each other were created. An
example are the experiments described in this paper,
where the agent’s objective was to reach a doorway
in an environment that is segmented (Figure 1.E) and
one that is not segmented (Figure 1.D).
The agent was trained separately in each of the
experiments in order to compare results. The first
environment trained was not segmented (Figure 1.D)
and its results (Table 11) were satisfactory. Overall, the
agent required 50 epochs to be successfully trained.
Table 11: Table with the results of the agent’s training in
the environment with a non-segmented door.
Model
Rise
Time
(s)
Mean
Final
Train
Std.
Final
Train
Mean
Train
Std.
Train
Mean
Val.
Std.
Val.
Door
without
TL
15.64 1.41 1.64 -11.47 5.69 -132.83 59.66
In order to use textures that were not from the
Doom, the environment was manually segmented
(Figure 1.E) and trained to discover how the agent
would behave. The results are shown in Table 12.
Even though the objective of the previous
environments was also a door, the fact that the
textures were simpler in this experiment made it
possible for the agent to learn quicker, with
approximately 40 epochs.
Table 12: Table with the results of the agent’s training in an
environment with the segmented door.
Model
Rise
Time
(s)
Mean
Final
Train
Std.
Final
Train
Mean
Train
Std.
Train
Mean
Val.
Std.
Val.
Segment
ed Door
14.96 1.09 1.99 -12.66 5.50 -155.29 81.18
Once the training was over, the transfer learning
was used to transfer the knowledge of the trained
network with a segmented environment to the non-
segmented environment.
Contrary to the non-segmented environment, the
segmented environment had simpler textures, without
details. That divergence resulted in a learning
difference for the agent, shown by Figure 12 and
Table 13. The results indicate that the texture affects
the learning process. Accordingly, the use of transfer
learning in an environment with a simpler texture and
then the transference of this learning to a more
complex texture resulted in a faster training.
Consequently, the agent learned after 42 epochs.
Figure 12: Results of the training with transfer learning in
environments with different textures.
Table 13: Table comparing the learning rate of different
textured environments.
Model
Rise
Time
(s)
Mean
Final
Train
Std.
Final
Train
Mean
Train
Std.
Train
Mean
Val.
Std.
Val.
Door
without
TL
15.64 1.41 1.64 -11.47 5.69 -132.83 59.66
Door
with TL
of Door
Segment
ed
environ
ment
11.02 1.24 1.92 -2.02 6.75 -98.24 71.44
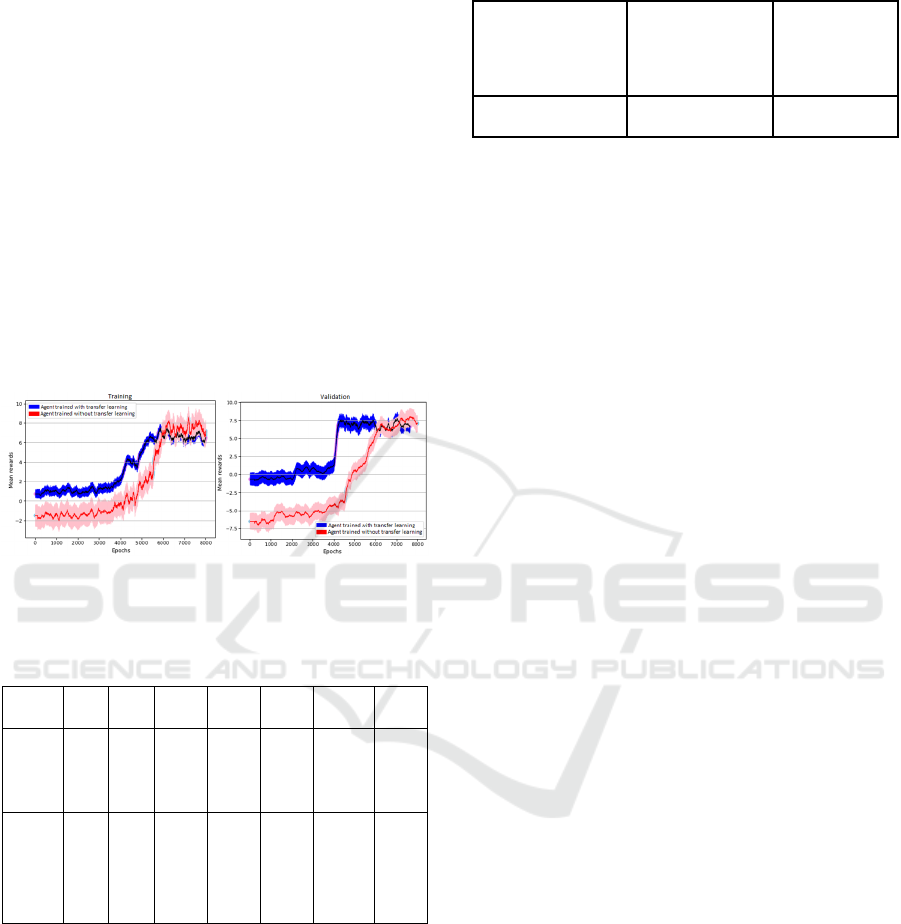
4.5 Transfer Learning: From a Simple
Environment to a More Complex
Environment
After the results were obtained in the Doom
environment, a more complex environment (
Figure 2
)
was developed similar to the real one. It presented
several challenges, such as furniture, plants and
intricate lighting. The objective of the environment
was to find the door. However, in this case, three
identical doors were created and only one of them was
considered correct.
The agent was trained without the use of transfer
learning. The training required more epochs because
the environment was more complex. It took 6255
epochs for the agent to learn (Figure 14 and Table 14).
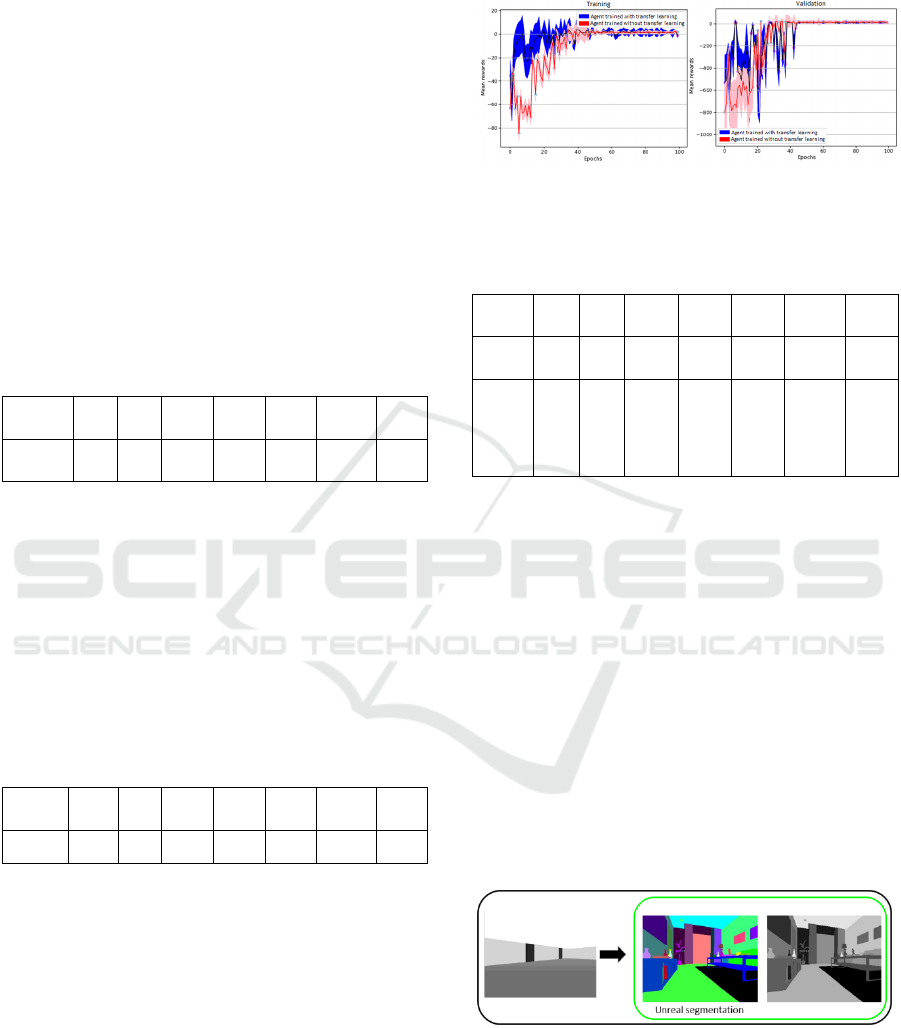
Figure 13: Pre-processing of the frame in the Realistic
Rendering environment.
In order to use transfer learning in the environment
trained with segmentation (Figure 1.E), the images
from the Realistic Rendering were semantically
divided using the segmentation for patterns created by
Training an Agent to Find and Reach an Object in Different Environments using Visual Reinforcement Learning and Transfer Learning
739
Unreal. After this process, the images were placed in
scales of gray so that the frames could match the
trained environment (
Figure 13
).
Regarding the use of transfer learning, the results
(Figure 14 and Table 14 ) showed that the technique
made a difference. Although the environment was
significantly more complex, the fact that the network
had previous knowledge, even from a distinct
environment, made the rewards higher from the
beginning of the training and decreased the rise time.
Upon analyzing the experiments, it was
concluded that, in the environments where the door
was the main objective, the agent learned the
trajectory to the door. Meanwhile, in the
environments where the objective was to retrieve a
box or a sphere, the agent learned that the objective
was to reach objects regardless of where they were
placed.
Figure 14: Results regarding the application of transfer
learning from a simple environment to a complex one.
Table 14: Table comparing the application of transfer
learning from a simple environment to a complex one.
Model
Rise
Time
(h)
Mean
Final
Train
Std.
Final
Train
Mean
Train
Std.
Train
Mean
Val.
Std.
Val.
Realisti
c
Renderi
ng
without
TL
11.55 8.70 1.45 1.78 1.39 -0.91 1.66
Realistic
Renderi
ng with
TL of
Segment
ed Port
Environ
ment
9.58 6.54 0.35 3.57 0.29 3.33 0.99
The training of each environment can take time
depending on the difficulty level. For example, the
training of an agent in the Realistic Rendering
environment using transfer learning in a Xeon
Platinum 8160 processor takes about 18.24h. Using
the same processor with an optimized Tensorflow for
the Intel® processor, the training time will decrease,
becoming 9.58h (Table 15).
Table 15: Time Comparison.
DQN – Realistic
Rendering using
transfer learning
Xeon Platinum
8160 Processor
Xeon Platinum
8160 Processor
with optimizer
Tensorflow
Training time
18.24h 9.58h
5 CONCLUSION AND FUTURE
WORK
This work presented a study on the simulation of an
autonomous robot that interacted with the
environment through a camera. In order to do so, a
deep learning algorithm by visual reinforcement
(Deep Q-Learning) was used, along with knowledge
transfer techniques in convolutive networks. The
main objective was to test the methods and algorithms
together in order to simulate the robot’s performance
in different environments and to use the experience
from the previous environments to reach the objective
quicker in complex environments.
The Deep Q-Learning choice as basis for the
simulation was based on a review of literature and
was motivated by major advances in Deep Learning,
which permit fast image processing through
convolutive network after a training stage. As a result,
camera guided robots increasingly extend their
autonomy and overcome limitations in traditional
reinforcement learning algorithms.
The transfer learning methodology was applied to
complex and dynamic environments, proving that it
can be used to test real robots. In addition, it improved
the processing time and allowed the development of
applications in realistic robot simulation
environments for these transfer learning techniques.
As a result, the methodology presents an efficient way
of performing simulations.
The performance of the methodology was
superior to that presented by other researches,
showing the stability and robustness of the robotic
system. These characteristics are essential to real
robots. The scenarios used in the simulation are
highly complex and dynamic, demonstrating that the
methodology conceived in this work works for robots
and real scenarios.
As future research, the authors propose using real
robots to test Deep Q-Learning in real environments
and extend the methodology to more specific tasks, in
order to verify how different the results would be
from the ones achieved in this study, as the efficacy
of transfer learning is already known.
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
740

REFERENCES
Day, M. A., Clement, M. R., Russo, J. D., Davis, D., &
Chung, T. H. (2015, June). Multi-uav software systems
and simulation architecture. In 2015 International
Conference on Unmanned Aircraft Systems (ICUAS)
(pp. 426-435). IEEE.
Miyahara, K. (2017, June). Prototype of ARM processor-
based robot module for a multi-agent mobile robot
system. In 2017 14th International Conference on
Ubiquitous Robots and Ambient Intelligence (URAI)
(pp. 629-631). IEEE.
Szegedy, C., Liu, W., Jia, Y., Sermanet, P., Reed, S.,
Anguelov, D., ... & Rabinovich, A. (2015). Going
deeper with convolutions. In Proceedings of the IEEE
conference on computer vision and pattern recognition
(pp. 1-9).
Nguyen, V., Kim, O. T. T., Pham, C., Oo, T. Z., Tran, N.
H., Hong, C. S., & Huh, E. N. (2018). A survey on
adaptive multi-channel MAC protocols in VANETs
using Markov models. IEEE Access, 6, 16493-16514.
Bisht, M., Abbott, J., & Gaffar, A. (2017, August). Social
dilemma of autonomous cars a critical analysis. In 2017
IEEE SmartWorld, Ubiquitous Intelligence &
Computing, Advanced & Trusted Computed, Scalable
Computing & Communications, Cloud & Big Data
Computing, Internet of People and Smart City
Innovation
(SmartWorld/SCALCOM/UIC/ATC/CBDCom/IOP/S
CI) (pp. 1-3). IEEE.
Meggitt, D., Roper, C., Henson, J., & Wicklund, D. (2016,
September). Autonomous Underwater Vehicle
Intervention for Advanced Undersea Networks. In
OCEANS 2016 MTS/IEEE Monterey (pp. 1-5). IEEE.
Chen, Y., Wang, W., Abdollahi, Z., Wang, Z., Schulte, J.,
Krovi, V., & Jia, Y. (2018). A Robotic Lift Assister: A
Smart Companion for Heavy Payload Transport and
Manipulation in Automotive Assembly. IEEE Robotics
& Automation Magazine, 25(2), 107-119.
Ravindran, R., Mills, J. P., & Krishnan, M. (2018, August).
Autonomous Multi-Robot Platoon Monitoring. In 2018
IEEE 61st International Midwest Symposium on
Circuits and Systems (MWSCAS) (pp. 328-331). IEEE.
Ly, O., Gimbert, H., Passault, G., & Baron, G. (2015,
April). A fully autonomous robot for putting posts for
trellising vineyard with centimetric accuracy. In 2015
IEEE International Conference on Autonomous Robot
Systems and Competitions (pp. 44-49). IEEE.
Naik, N. S., Shete, V. V., & Danve, S. R. (2016, August).
Precision agriculture robot for seeding function. In
2016 International Conference on Inventive
Computation Technologies (ICICT) (Vol. 2, pp. 1-3).
IEEE.
Alberri, M., Hegazy, S., Badra, M., Nasr, M., Shehata, O.
M., & Morgan, E. I. (2018, September). Generic ROS-
based Architecture for Heterogeneous Multi-
Autonomous Systems Development. In 2018 IEEE
International Conference on Vehicular Electronics and
Safety (ICVES) (pp. 1-6). IEEE.
Watkins, C. J., & Dayan, P. (1992). Q-learning. Machine
learning, 8(3-4), 279-292.
Sutton, R. S., & Barto, A. G. (1998). Introduction to
reinforcement learning (Vol. 2, No. 4).
Sarkar, U. K., Chakrabarti, P. P., Ghose, S., & DeSarkar, S.
C. (1994). Improving greedy algorithms by lookahead-
search. Journal of Algorithms, 16(1), 1-23.
Mnih, V., Kavukcuoglu, K., Silver, D., Graves, A.,
Antonoglou, I., Wierstra, D., & Riedmiller, M. (2013).
Playing atari with deep reinforcement learning. arXiv
preprint arXiv:1312.5602.
Asawa, C., Elamri, C., & Pan, D. (2017). Using Transfer
Learning Between Games to Improve Deep
Reinforcement Learning Performance and Stability.
Yin, H., & Pan, S. J. (2017, February). Knowledge transfer
for deep reinforcement learning with hierarchical
experience replay. In Thirty-First AAAI Conference on
Artificial Intelligence.
Parisotto, E., Ba, J. L., & Salakhutdinov, R. (2015). Actor-
mimic: Deep multitask and transfer reinforcement
learning. arXiv preprint arXiv:1511.06342.
Kempka, M., Wydmuch, M., Runc, G., Toczek, J., &
Jaśkowski, W. (2016, September). Vizdoom: A doom-
based ai research platform for visual reinforcement
learning. In 2016 IEEE Conference on Computational
Intelligence and Games (CIG) (pp. 1-8). IEEE.
Slade 3. http://slade.mancubus.net/. Accessed em: 2019-06-
18
Zdoom. https://zdoom.org/index. Accessed em: 2019-01-
25
Zhong, F., Qiu, W., Yan, T., Alan, Y., & Wang, Y. (2017).
Gym-UnrealCV: Realistic virtual worlds for visual
reinforcement learning.
Abadi, M., Agarwal, A., Barham, P., Brevdo, E., Chen, Z.,
Citro, C., ... & Ghemawat, S. (2016). Tensorflow:
Large-scale machine learning on heterogeneous
distributed systems. arXiv preprint arXiv:1603.04467.
Training an Agent to Find and Reach an Object in Different Environments using Visual Reinforcement Learning and Transfer Learning
741
