
Real-time Active Vision for a Humanoid Soccer Robot using
Deep Reinforcement Learning
Soheil Khatibi
1 a
, Meisam Teimouri
1 b
and Mahdi Rezaei
2 c
1
Mechatronics Research Laboratory, Qazvin Azad University, Qazvin, Iran
2
Institute for Transport Studies, University of Leeds, Leeds, U.K.
Keywords:
Deep Reinforcement Learning, Active Vision, Deep Q-Network, Humanoid Robot, RoboCup.
Abstract:
In this paper, we present an active vision method using a deep reinforcement learning approach for a humanoid
soccer-playing robot. The proposed method adaptively optimises the viewpoint of the robot to acquire the
most useful landmarks for self-localisation while keeping the ball into its viewpoint. Active vision is critical
for humanoid decision-maker robots with a limited field of view. To deal with active vision problem, several
probabilistic entropy-based approaches have previously been proposed which are highly dependent on the
accuracy of the self-localisation model. However, in this research, we formulate the problem as an episodic
reinforcement learning problem and employ a Deep Q-learning method to solve it. The proposed network only
requires the raw images of the camera to move the robot’s head toward the best viewpoint. The model shows
a very competitive rate of 80% success rate in achieving the best viewpoint. We implemented the proposed
method on a humanoid robot simulated in Webots simulator. Our evaluations and experimental show that
the proposed method outperforms the entropy-based methods in the RoboCup context, in cases with high
self-localisation errors.
1 INTRODUCTION
Active Vision, by definition, is the method of
actively planning, manipulating, and adjusting the
camera viewpoint, with the goal of obtaining
the most optimised information from a given
environment, which can be either static or dynamic.
Object/landmarks detection in an environment is an
important research problem that has already been
addressed and studied by many researchers such as
in (Rezaei and Klette, 2017), (Teimouri et al., 2019).
However, in active vision, the goal is to reach the
viewpoints which contain most important landmarks
and objects so that there is a chance to detect them.
Speaking about the importance of active vision, there
are lots of cases where we encounter with limited
computational and processing resources. In such
circumstances, the best plan is to try to use the
existing resources in an optimised manner in order
to make the most of it. Another application of the
active vision is when the field of view of the camera
a
https://orcid.org/0000-0002-2968-3576
b
https://orcid.org/0000-0003-0465-6528
c
https://orcid.org/0000-0003-3892-421X
is limited. In such cases, in order to gain the most
possible observations, it would be wise to manipulate
the viewpoint in a way that more observations are
sensed. Furthermore, in case of occlusions and
partial visibility, using an active vision algorithm
to intelligently conduct the eyesight toward more
informative observations will be extremely helpful.
In order to plan for the best viewpoint of
the camera, knowing the accurate state of the
environment and the agent itself are crucial. In active
vision, due to dynamic nature of the objects and the
uncertainty in the state of the agent, the state of
the environment and the agent itself are not exactly
available. Therefore, an active vision system should
model its state and the environment as accurately as
possible. This is one of the major challenges in this
field. On the other hand, trying to determine the
best viewpoint with a high efficiency considering the
limitations of an agent in a dynamic environment can
be computationally expensive. So active vision has
been studied from different points of view and there
are different approaches in this field.
One of the common techniques is the probabilistic
based solutions. In this kind of attitudes, the belief of
the robot is modelled with a probability distribution.
742
Khatibi, S., Teimouri, M. and Rezaei, M.
Real-time Active Vision for a Humanoid Soccer Robot using Deep Reinforcement Learning.
DOI: 10.5220/0010237307420751
In Proceedings of the 13th International Conference on Agents and Artificial Intelligence (ICAART 2021) - Volume 2, pages 742-751
ISBN: 978-989-758-484-8
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Such techniques choose the action that minimises
the uncertainty of the belief (Burgard et al., 1997).
In (Seekircher et al., 2010) and (Czarnetzki et al.,
2010), the belief models the position of the robot.
The concept of entropy is utilised as a measure
indicating the rate of uncertainty in a probability
distribution. Therefore, the best action is the one
that minimises the entropy of current belief. This
approach, however, has some weaknesses. For
example, in order to choose the next appropriate
action, we have to calculate the model entropy
by assuming all of the actions have already been
completed. In these circumstances, regardless of
the fact that the state of the dynamic objects can
not be estimated accurately, the performance of the
model will be highly dependent on the accuracy
of the current belief. Another approach in active
vision is to formulate the problem as a reinforcement
learning where a big variety of modern algorithms
can be utilised such as deep neural networks. These
approaches have witnessed great progress (Han et al.,
2019), (Cheng et al., 2018) in recent years thanks to
advances in reinforcement learning and deep neural
networks. However, these methods are substantially
in need of significant processing resources as well as
time-consuming training procedures. Also due to the
complexity of the state and action space, training a
robust model will be non-trivial and challenging. As
another challenge, and depending on the complexity
of the task, usually performing a real-world training
is not feasible and this should be accomplished in a
simulator environment. However, the trained models
in the simulation environment can not necessarily
perform in real-world environments with the same
performance.
As of the main contributions of this research,
we first formulate the problem as an episodic
reinforcement learning problem by defining a Markov
Decision Process. The objective is to adjust the head
viewpoint through an optimum direction that will
have the best observations so that the self-localisation
reaches the highest accuracy, along with an accurate
belief from the current state of the environment. In
each episode, the best action is determined using an
entropy minimising methodology. Since the training
process is performed in the simulation environment,
the position of the robot is accurately available. So,
the entropy minimisation method for determining the
best action would be efficient. The algorithm used
for training is DDQN and PER (Mnih et al., 2015),
(Van Hasselt et al., 2016) and (Schaul et al., 2015),
which uses an experience replay memory to keep
records of previous experiences so far. As the second
contribution in this research, we make the action
selection process independent of the localisation error
and the belief error of the environment. The input of
the algorithm is just the raw images and the output is
a vector of q-values indicating how useful each action
is. Thus, having a trained model, we can control the
head position by simply passing the current image to
the model and select the appropriate action with the
highest q-value without requiring any further input
information.
We provide further details in the next sections.
The rest of the paper is organised as follows: In
Section 2, the main research-works and achievements
accomplished in this field has been outlined. In
Section 3, the problem is defined and our proposed
method has been presented in details. In Section 4,
the outcome of the experimental results has been
discussed. And finally, the concluding remarks are
provided in Section 5.
2 RELATED WORK
Despite the fact that an active sensor transmits
and receives information from the environment,
active vision has been referred to as a planning
strategy challenge to control the process of
environment perception around an agent. This
can be accomplished by manipulating the agent or
robot’s viewpoint, although it does not transmit any
information, but only receives some environmental
information (Bajcsy, 1988).
It is now decades that this research field has been
attracting interests for coping with challenges like
occlusions, limited field of view, limited resolution
of the camera, and low computational resources.
(Swain and Stricker, 1993) outlines and explains
some fields and research areas in active vision such as
gaze control, hand-eye coordination, and embedding
techniques in robotic settings.
More recently, (Chen et al., 2011) summarised
some of the developments of active vision in the
robotic fields over the past 15 years, and describes
problems arising from applications such as object
recognition, tracking and search, localisation, and
mapping.
(Mitchell et al., 2014) has studied the visual
behaviour of Marmosets such as their saccadic
behaviours in different situations considering their
neurophysiology and neural mechanisms. From
the cognitive point of view, (Kieras and Hornof,
2014) surveys some advances in cognitive models
for human-computer interaction using active vision
systems. Also (Rolfs, 2015) investigates the
perceptual and cognitive processes and their relations
Real-time Active Vision for a Humanoid Soccer Robot using Deep Reinforcement Learning
743

with the memory from the psychological point of
view.
Very recently, (Ammirato et al., 2017) has
provided an active vision dataset including bounding
boxes of some detected objects which can be used not
only in object detection tasks, but also in active vision
methods as a simulated environment.
(Falanga et al., 2017) applies active vision for
manipulating quadrotor robot orientation in the task
of passing narrow gaps.
In RoboCup domain, Seekircher et al. (Seekircher
et al., 2010) have suggested a method for actively
sensing the environment in order to increase the
efficiency of self-localisation and ball tracking by
minimising the entropy of an underlying particle
distribution. They have demonstrated the approach
on a humanoid robot on a RoboCup soccer field.
Czarnetzki et al (Czarnetzki et al., 2010) have
done a similar work in this field which provides
optimal decisions based on the current localisation
and its uncertainty in a soccer robot scenario.
Mattamala et al. (Mattamala et al., 2015) propose
a method for mapping both static and dynamic
information to an action as the best head manoeuvre
action. The method determines the appropriated
head action using on a combined score based on the
existing obstacles in the scene, the cost of performing
each action, and the limitation ahead. The method
performs real-time.
Han et al. (Han et al., 2019) formulates active
object detection as a sequential action decision
process and propose a dueling architecture to resolve
it. It uses an object detector to detect and localise
the object in the image and feeds the image along
with a representation of the detected object to a deep
q-network. The model outputs the state-action values
in order to reach a higher rate of object detection.
Cheng et al. (Cheng et al., 2018) also use an object
detector module for both actor and critic networks in
their actor-critic architectures in situations where the
camera is active. They propose hand/eye controllers
that learn to move the camera to keep the object
within the visible field of view, in coordination to
manipulating it to achieve the desired goal in cluttered
or occluded environments. Both recent works require
an object detector. Although this may help and
accelerate the course of learning, it can be unavailable
in some circumstances and environments.
3 METHODOLOGY
We are interested in reaching the best viewpoint
to perceive the most useful observations from the
environment for self-localisation while having an
object of interest within the viewpoint of the
Robot. First let’s provide more details on the task
specifications.
3.1 Task Specifications
In a humanoid robot, the viewpoint is controlled by
the actuators of the robot’s head and the environment
is a Robocup humanoid soccer field. The important
object of interest in the humanoid soccer field is the
ball and the observations are in fact the landmarks
that contribute to the process of the robot localisation.
Therefore the goal is not only to use perceived
observations to localise the robot in a dynamic
environment, but also to be in control of the match
as the consequence of always having the ball in the
viewpoint.
We see this as a sequential decision-making
problem; therefore, to cope with the challenge, we
offer an episodic reinforcement learning solution,
with two main actors: the agent and a dynamic
environment. Environment refers to the soccer field
with its whole components that the agent should
interact with, and the agent is the humanoid robot
which aims to learn the optimal policy to optimise
the robot’s viewpoint. The agent-environment
interaction is formulated as a Partially Observable
Markov Decision Process (POMDP) represented by
observations o ∈ O, states s ∈ S , actions a ∈ A, and
the reward function r : S × A → R. The components
of this POMDP are described below:
• Observations: Visual Information has diversely
been used in sequential decision-making
problems so far in different forms. Here,
observation o
t
is a gray-scale image captured at
time step t by a camera mounted on the head of
the robot.
• State Representation: In this problem, states are
represented as a sequence of observations o
t
that
the robot sees. The size of the stack can vary
according to the circumstances of the problem.
• Action Space: The action space is a set of discrete
actions in which each action a
t
moves the robot
viewpoint in a specific direction to a little fixed
extent.
• Reward Function: The goal of our reward
function is to encourage the robot to move its
head through the goal position and penalises the
robot from moving its head away from the goal
position, alongside considering a negative reward
for missing the ball. This function is specified as
below:
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
744
Reward =
(
−2, for missing all balls
sign(D
0
− D), elsewhere
(1)
where D is the distance of head to the goal
position before taking the action and D
0
is the
same distance after taking the action.
3.2 Goal Determination
At the beginning of each episode, the best possible
viewpoint should be determined from the position
of the robot and the ball. As specified in
the previous sub-section, the goal position is the
viewpoint containing the landmarks that improve the
self-localisation model of the robot in the best way
while keeping the ball in it. To accomplish this
objective, we discretise the camera position space and
evaluate all possible positions to determine the goal
position. Every camera position p is represented by
the tuple
p = (θ
pan
, θ
tilt
) (2)
where
−π
2
< θ
pan
<
π
2
and
π
36
< θ
tilt
<
13π
36
are the pan and title angles of the head actuators,
which are discretised into 10 and 4 points,
respectively. Note that every camera position
corresponds to a viewpoint, so we can use these terms
interchangeably.
We represent the belief of the robot position using
a multivariate normal distribution:
X ∼ N (µ, Σ) (3)
where µ is the mean vector representing the position
of the robot and Σ is the covariance matrix that shows
the uncertainty related to the position.
To evaluate the efficiency of a viewpoint for
self-localisation we employed an entropy-based
method. The best viewpoint is one that contains the
ball and minimises the entropy of the Gaussian model.
The process of finding the best viewpoint is shown in
Algorithm 1. The algorithm takes the robot and ball
positions as input and returns the best viewpoint.
As shown in lines 2-11 of the algorithm, for each
viewpoint p, we compute the expected entropy and
update the best viewpoint p
∗
. First, all observations
measured from visible landmarks at the current
position of the robot and viewpoint p are determined
in line 4. Each observation z ∈ Z is related to a visible
landmark and represents the distance and angle of the
landmark to the robot.
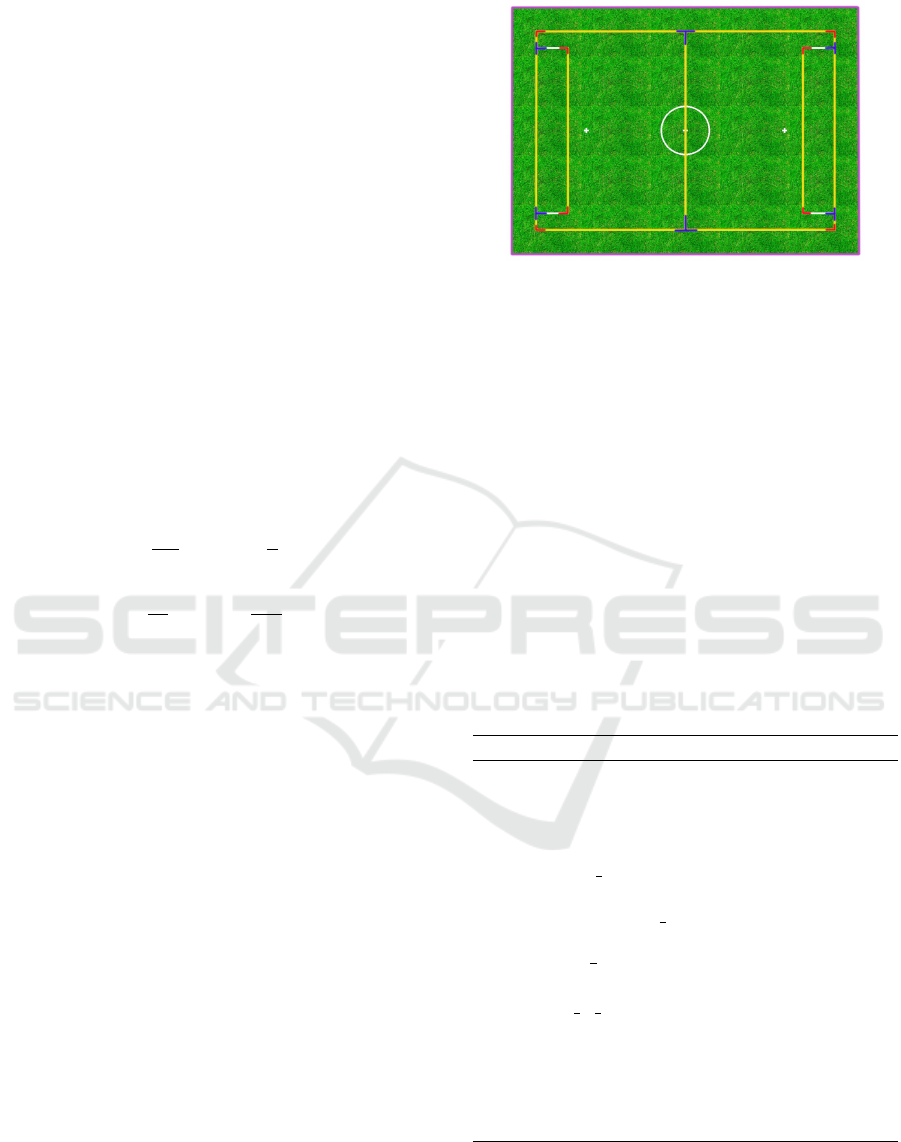
Figure 1: Different parts of the soccer field markings,
categorised and colour coded based on their types. Red for
”L”s, blue for ”T”s, yellow for lines, and purple for the field
boundary.
The visible landmarks can be determined easily
from the field model. Figure 1 illustrates different
landmarks in the field categorised by different
colours. However, the measurements of landmarks
are assumed to be noisy. So each landmark that
is projected to the viewpoint p and located at a
predetermined distance to the robot is considered as
visible. This distance is estimated experimentally
for each type of landmark. In (Seekircher et al.,
2010), a visibility model is learned using a neural
network. Then for every z we update the belief X
using Unscented Kalman filter (line 6) (Teimouri
et al., 2016)). The entropy for updated belief X
0
is
calculated in line 8.
Algorithm 1: Viewpoint exploration.
Input: X
t
= N (µ
t
, Σ
t
) , ball pose = (x
t
, y
t
)
1: H
min
= ∞
2: for each p ∈ P do
3: X
0
= X
t
4: Z = get observations(X
0
, p)
5: for each z ∈ Z do
6: X
0
= apply UKF(X
0
, z)
7: end for
8: H
X
0
=
1
2
ln(|(2πe)Σ|)
9: if H
X
0
< H
min
and
10: ball is visible(X
0
, ball pose) then
11: H
min
= H
X
0
12: p
∗
= p
13: end if
14: end for
15: return p
∗
Real-time Active Vision for a Humanoid Soccer Robot using Deep Reinforcement Learning
745
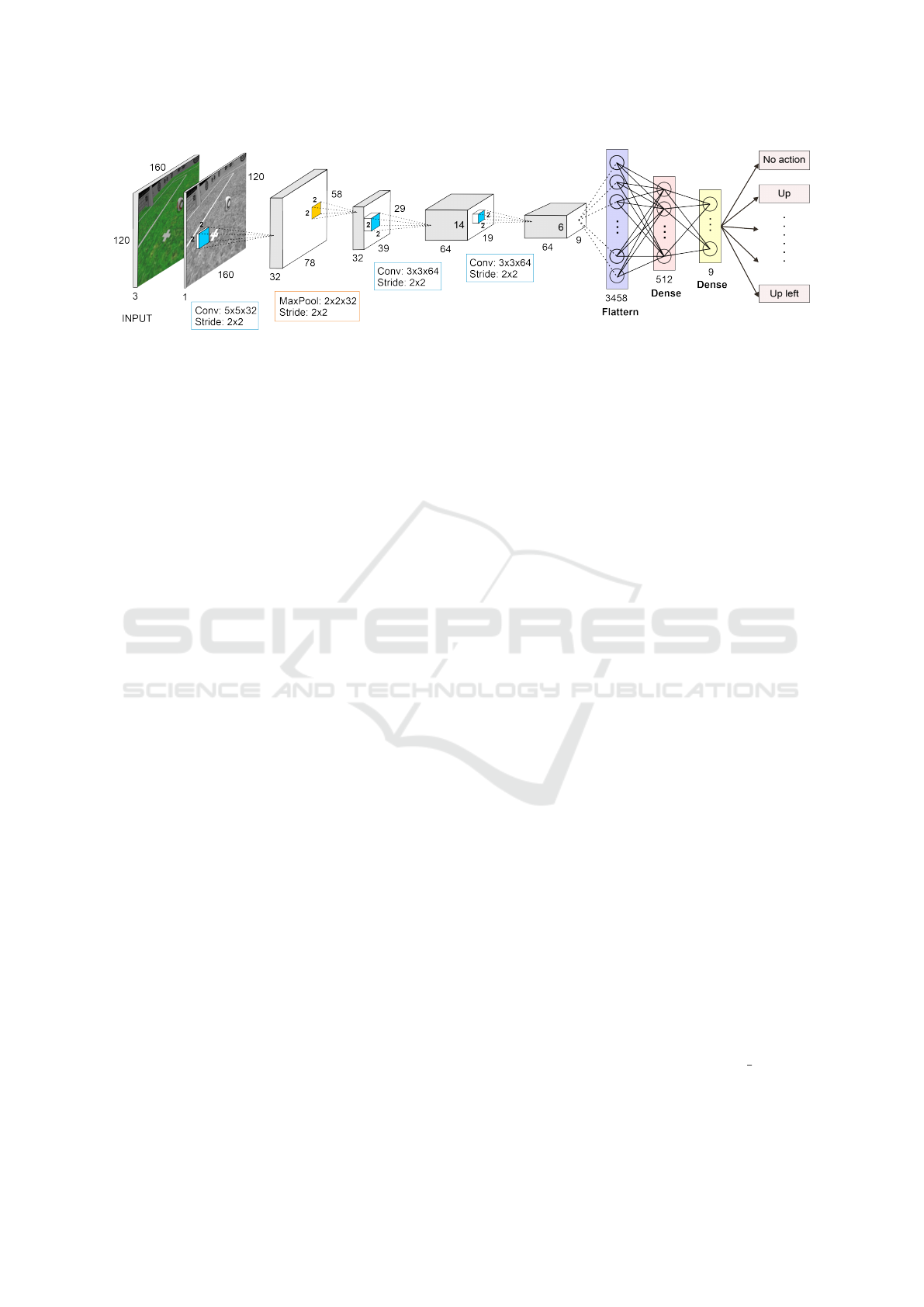
Figure 2: Neural network architecture. Note that ReLU activation function has been used for all layers except for the
max-pooling layer and the last layer.
3.3 Training Process and Details
(Seekircher et al., 2010) has used the output of an
entropy-based algorithm in online controlling of the
robot’s head. This can lead to wrong results in the
case of inaccurate localisation which is a common
issue in localisation algorithms (such as (Seekircher
et al., 2010) and (Teimouri et al., 2016)).
In our proposed sequential decision-making
method, the input is the current image which is
independent to the localisation accuracy. However,
this makes the task more complex and tricky in some
specific positions due to the symmetricity of the
soccer field.
As mentioned earlier, this is an episodic task
where at the beginning of each episode, the ball and
robot are randomly positioned in the field with a
random camera position. Then the goal (i.e. the
best viewpoint) is determined using the proposed
algorithm in the previous section. Afterwards, the
agent starts to take actions until termination. Note that
the episode finishes successfully if the agent reaches
the goal viewpoint and will fail if the agent misses
the ball from its field of view. The episode also
terminates after 20 time steps to avoid long episodes.
After termination, the environment resets and another
episode begins.
The Algorithm that has been applied to solve
the represented problem is DDQN Algorithm
(Van Hasselt et al., 2016), which is an extension of
DQN (Mnih et al., 2015). Also Prioritised Experience
Replay (Schaul et al., 2015) has been utilised. In
DQN algorithms, Q-function is approximated using
a deep neural network. Q-values are real numbers
indicating the quality of each action in a specific state.
More formally, Q(s, a) is the expected cumulative
discounted reward after taking action a in state s. In
double deep Q-learning, selection and evaluation are
untangled. One network parameterised with θ is used
for selecting the action and another one parameterised
with θ
0
is used to evaluate Q-values. The Q-values
should be updated towards a target value:
Y
t
DoubleQ
≡ R
t+1
+γQ(S
t+1
, arg max
a
Q(S
t+1
, a; θ
t
);θ
0
t
)
(4)
Each experience e
t
= (s
t
, a
t
, r
t
, s
t+1
) consists of state,
action, the reward after taking the action, and the
subsequent state after taking the action. In the training
phase, different batches are picked to train the neural
network from a prioritised experience replay in which
important transitions are picked more frequently.
The architecture of the convolutional neural
network is shown in Figure 2. It takes gray-scale
images as input and outputs a vector of Q-values
whose length equals the number of possible actions.
We fed a tensor with the size of 160 × 120 × 1 as the
input to the network. The first hidden layer convolves
32 filters of 5 × 5 with Stride 2 and then applies a
non-linear activation function. The second hidden
layer applies a Max pooling of 2×2 with stride 2. The
third hidden layer convolves 64 filters of 3 × 3 with
stride 2, followed by a non-linear activation function.
This is then followed by another convolutional layer
that convolves 64 filters of 3×3 with stride 2 followed
by a non-linear activation function. Then there is
a hidden fully-connected layer that consists of 512
units. Finally, the output layer is a fully-connected
linear layer with an output for each action.
The hyperparameters used in our work are shown
in table 1. The Adam optimiser is used for the
training phase of the network. Also the learning rate
is constant during the whole training steps.
4 EXPERIMENTS AND RESULTS
The video link https://youtu.be/kOX vY6ir5M
represents the summary of our experiments.
This section is organised as follows. In Sec. 4.1,
we introduce the Reinforcement Learning (RL)
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
746
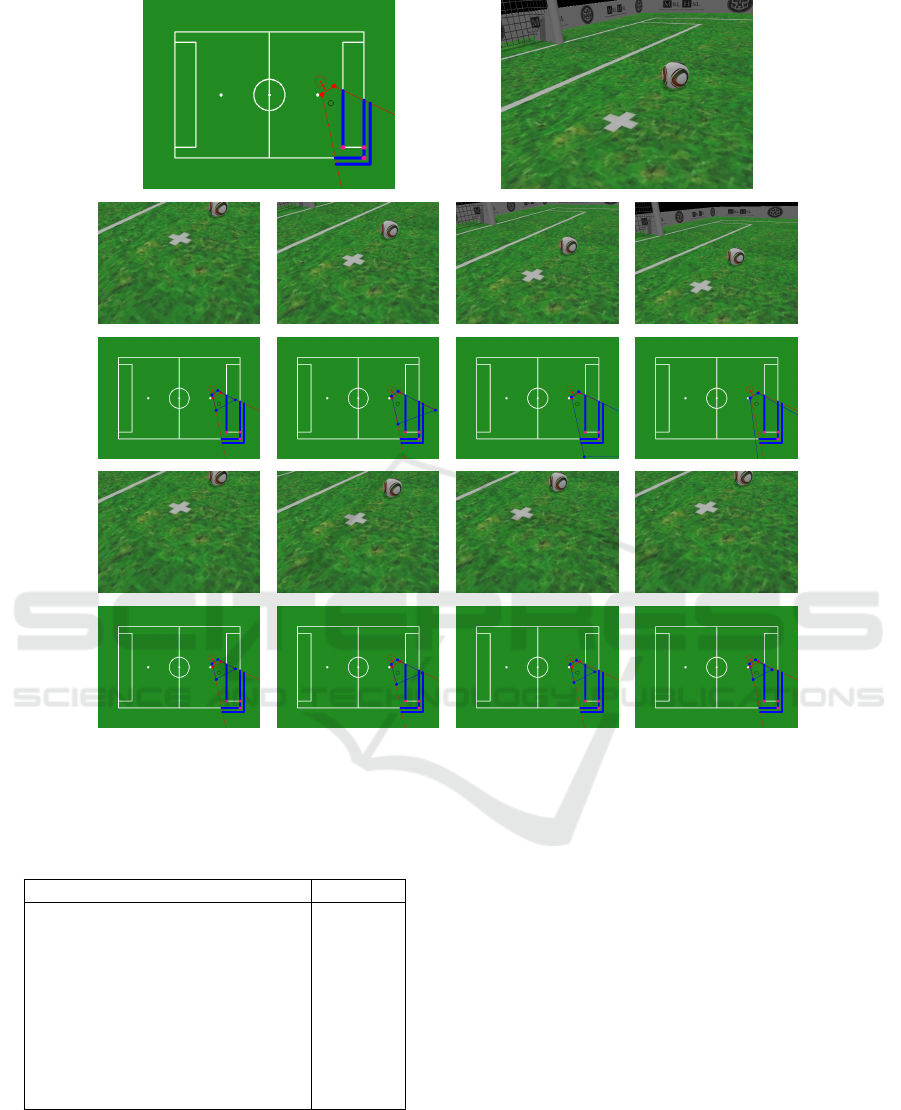
Figure 3: From top to bottom, Row 1: The best viewpoint of the robot (right) from specified position (left). Row 2, 3:
Active view point adjustment and visible landmarks started from left. Row 4, 5: Random viewpoint adjustment and visible
landmarks. Note that the robot’s position is marked with a red circle. the red polygons show the best viewpoint and the blue
ones show the current viewpoint. Also visible landmarks in the best viewpoint are illustrated with blue lines and pink points.
Table 1: HyperParameters.
Hyperparameter Value
Minibatch size 32
Replay memory size 1000000
Learning rate 0.0005
Discount factor 0.99
Target network update frequency 10000
Initial exploration rate 1
Final exploration rate 0.02
Prioritised replay buffer α 0.6
Initial prioritised replay buffer β 0.4
environment we used for the experiments and our
training procedure, as well as the specs of the agent
that has been trained. In Sec. 4.2, we assess the
performance of the proposed method during the
training phase. In Sec. 4.3, we check how the
self-localisation error affects the performance of the
proposed method against the entropy-based method.
We evaluate the proposed DQN through some
experiments and compare the results with previous
works in RoboCup competitions. While many types
of experiments can be considered to assess, in this
research, we limited our experiments on some of the
most important aspects such as the success rate in
reaching the best viewpoint, number of steps taken
to reach the best viewpoint, number of steps taken
to miss the ball from the viewpoint, and comparing
the proposed method with the entropy-based method
when the self-localisation error increases. Figure 3
shows the operation of the proposed method in an
example robot and camera position, compared to
random action selection.
Real-time Active Vision for a Humanoid Soccer Robot using Deep Reinforcement Learning
747
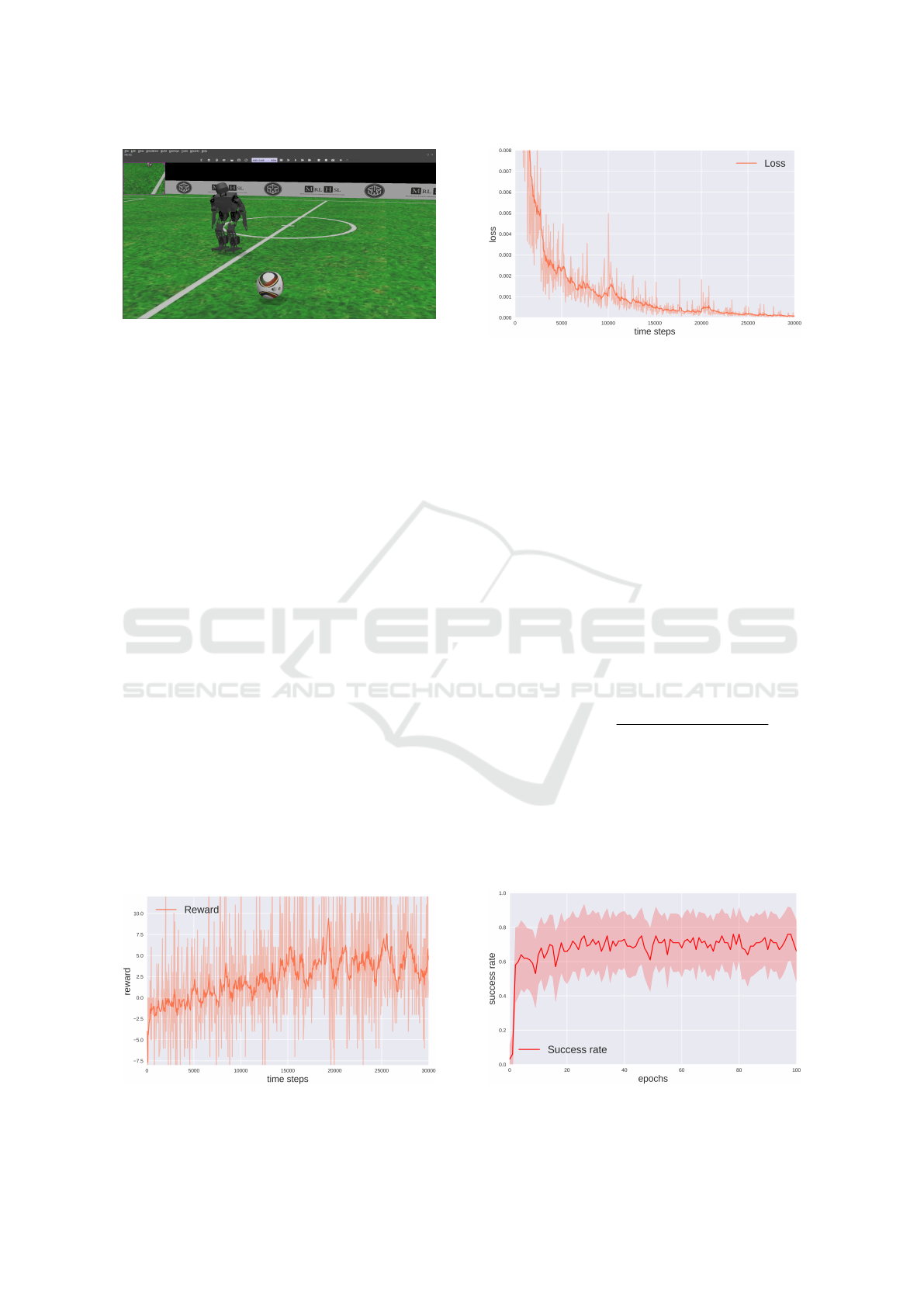
Figure 4: An overview of the simulator and training
environment.
4.1 Experiments Environment
Our training environment is designed and set up
using the Webots simulator (Michel, 2004). We used
Tensorflow (Abadi et al., 2016) and Stable-baselines
(Hill et al., 2018), an improved version of OpenAI
Baselines (Dhariwal et al., 2017), to implement
DDQN and PER. Position commands are used to
control the head joints at each time step. Each
command takes 320ms to rotate the camera viewpoint
by approximately 3 degrees. All processes such as
simulating, training, and inference are run in a PC
platform equipped with an Intel Core i7- 7700HQ
processor, and an Nvidia GeForce GTX 1060 GPU.
Note that the average time of inference on this PC was
0.0023 seconds which can be used in real-time.
We tested the proposed method on the MRL-HSL
humanoid robot (Mahmoudi et al., 2019) simulated in
Webots. An overview of the simulated environment
is shown in Figure 4. The goal of the agent is
clearly to reach the camera position in which the
best landmarks are visible from any initial random
position by manipulating neck and head joints. All
episodes are bound to 20 time steps but may terminate
prematurely in the case of missing the ball from
the field of view (as failure) or reaching the best
viewpoint (as success).
The agent controls the camera viewpoint within a
Figure 5: Total reward gained per episode during the
training course.
Figure 6: Loss function of the model during the training
course.
certain limited region. The camera actions, include
rotations to a specific extent (3 degrees in our case)
and in a certain directions, as described in section 3.1.
The other joint angles of the robot remain same as the
starting situation. When the camera position is within
a specific range of tolerance from the goal position,
the episode ends with success.
4.2 Model Performance
The agent has been trained for 30000 time steps. Total
reward per episode and loss function during training
phase are illustrated in Figure 5 and 6 respectively. To
evaluate the performance of the model, we propose
and measure 3 criteria during the training phase. The
first criterion is Success rate. In an episode, we define
Success rate as
SuccessRate =
|{observed landmarks}|
|{desired landmarks}|
(5)
which indicates how much of the desirable landmarks
in the best viewpoint are observed. Since we know
the accurate position of the robot in simulation
environment, we can determine the best viewpoint
using algorithm 1. So the Success rate can be
calculated by dividing the current number of observed
landmarks to the number of visible landmarks in
Figure 7: The average Success rate measured during
training epochs.
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
748

Figure 8: The average Ball loss duration measured during
training epochs.
the best viewpoint. The second criterion is Success
duration which is the time steps taken to reach the
goal. If the robot doesn’t reach the goal in that
episode, it will be 20 indicating not to reach the goal.
Finally, the third criterion(which was helpful for us
in the Ball loss rate reduction), is Ball loss duration
which is the time steps taken to lose the ball in each
episode. If the robot doesn’t lose the ball, it will be
20, indicating that the robot has not lost the ball in
that episode.
During the training phase, The Success rate
and the Ball loss duration are expected to increase
gradually as the robot learns to adjust its viewpoint
through more observations and keep the ball in the
viewpoint. Figure 7 and 8 show that the robot has
learned to achieve the best viewpoint and keep the ball
in its point of view. However, the Success duration
is expected to decrease. According to our reward
function, the robot receives a negative reward if it
doesn’t move its head through the best viewpoint and
in order to maximise the cumulative reward, it should
learn to reach the best viewpoint as fast as possible.
Figure 9 shows that the robot also has learned to
achieve the best viewpoint as fast as possible. We
have considered each 300 time steps of the training
phase as a training epoch and measured these criteria
in each epoch.
Figure 9: The average Success duration measured during
training epochs.
Figure 10: Comparison of our method’s average
Success rate against the entropy based method as the
self-localisation error increases.
4.3 Comparison with Entropy-based
Method
In this section, the effect of localisation error on
the performance of the proposed method is assessed
against the entropy-based method. The entropy-based
methods have had the best performance in active
vision tasks so far in RoboCup and similar contexts
as far as we know.
In this experiment we report the average Success
rate in different episodes starting from different
random positions as the self-localisation error
increases. The error shows the amount of inaccuracy
in both position(in meter) and direction(in radian) of
the robot.
Considering that localisation error is practically
inevitable in a soccer playing field, just performing
the action that entropy-based methods output will not
be desirable for our viewpoint optimisation task.
Figure 10 illustrates the results of the experiment.
As shown in Figure 10, in entropy-based methods,
the more localisation error, the lower performance
can be expected. And this is because these methods
operate as a function of the robot and ball positions.
Therefore, they are highly dependent on the accuracy
of the self localisation.
On the other hand, Figure 10 confirms that no
matter how inaccurate the localisation model is, the
performance of our method remains steady. It handles
the detrimental impact of localisation error. And this
is because our proposed method works as a function
of the current input image and doesn’t rely on the
localisation accuracy.
Real-time Active Vision for a Humanoid Soccer Robot using Deep Reinforcement Learning
749

5 CONCLUSION AND FUTURE
WORK
In this work, we presented an active vision problem
in the context of Robocup which intends to control
the head movements of a humanoid soccer robot. The
method formulated the problem as a Markov Decision
Process using Deep Reinforcement Learning. In
the action selection phase (at the beginning of each
episode), we used an entropy-minimising method
applied to the UKF model which is responsible for
the robot localisation. In this work we applied the
DQN algorithm. The results of the trained model
were presented and analysed. The proposed method
operates without reliance on the current belief of the
environment and is compared with the previous works
which only use entropy minimisation for the real-time
head control.
We defined the problem as a Markov Decision
Process. Therefore the problem can be solved
with newer algorithms of reinforcement learning that
consider the continuous action space such as PPO
(Schulman et al., 2017) and DDPG (Lillicrap et al.,
2015). Also, the performance of the method might
be improved by passing a rough representation of the
robot position along with the image. This can handle
the problem of similarity between the symmetric
observations in the soccer field.
REFERENCES
Abadi, M., Agarwal, A., Barham, P., Brevdo, E., Chen, Z.,
Citro, C., Corrado, G. S., Davis, A., Dean, J., Devin,
M., et al. (2016). Tensorflow: Large-scale machine
learning on heterogeneous distributed systems. arXiv
preprint arXiv:1603.04467.
Ammirato, P., Poirson, P., Park, E., Ko
ˇ
seck
´
a, J., and
Berg, A. C. (2017). A dataset for developing
and benchmarking active vision. In 2017 IEEE
International Conference on Robotics and Automation
(ICRA), pages 1378–1385. IEEE.
Bajcsy, R. (1988). Active perception. Proceedings of the
IEEE, 76(8):966–1005.
Burgard, W., Fox, D., and Thrun, S. (1997). Active
mobile robot localization by entropy minimization. In
Proceedings second euromicro workshop on advanced
mobile robots, pages 155–162. IEEE.
Chen, S., Li, Y., and Kwok, N. M. (2011). Active vision
in robotic systems: A survey of recent developments.
The International Journal of Robotics Research,
30(11):1343–1377.
Cheng, R., Agarwal, A., and Fragkiadaki, K. (2018).
Reinforcement learning of active vision for
manipulating objects under occlusions. arXiv
preprint arXiv:1811.08067.
Czarnetzki, S., Kerner, S., and Kruse, M. (2010). Real-time
active vision by entropy minimization applied to
localization. In Robot Soccer World Cup, pages
266–277. Springer.
Dhariwal, P., Hesse, C., Klimov, O., Nichol, A., Plappert,
M., Radford, A., Schulman, J., Sidor, S., Wu, Y., and
Zhokhov, P. (2017). Openai baselines. https://github.
com/openai/baselines.
Falanga, D., Mueggler, E., Faessler, M., and Scaramuzza,
D. (2017). Aggressive quadrotor flight through narrow
gaps with onboard sensing and computing using active
vision. In 2017 IEEE international conference on
robotics and automation (ICRA), pages 5774–5781.
IEEE.
Han, X., Liu, H., Sun, F., and Zhang, X. (2019). Active
object detection with multistep action prediction using
deep q-network. IEEE Transactions on Industrial
Informatics, 15(6):3723–3731.
Hill, A., Raffin, A., Ernestus, M., Gleave, A., Kanervisto,
A., Traore, R., Dhariwal, P., Hesse, C., Klimov, O.,
Nichol, A., Plappert, M., Radford, A., Schulman, J.,
Sidor, S., and Wu, Y. (2018). Stable baselines. https:
//github.com/hill-a/stable-baselines.
Kieras, D. E. and Hornof, A. J. (2014). Towards accurate
and practical predictive models of active-vision-based
visual search. In Proceedings of the SIGCHI
conference on human factors in computing systems,
pages 3875–3884.
Lillicrap, T. P., Hunt, J. J., Pritzel, A., Heess, N., Erez,
T., Tassa, Y., Silver, D., and Wierstra, D. (2015).
Continuous control with deep reinforcement learning.
arXiv preprint arXiv:1509.02971.
Mahmoudi, H., Fatehi, A., Gholami, A., Delavaran, M. H.,
Khatibi, S., Alaee, B., Tafazol, S., Abbasi, M., Doust,
M. Y., Jafari, A., et al. (2019). Mrl team description
paper for humanoid kidsize league of robocup 2019.
Mechatronics Research Lab, Department of Computer
and Electrical Engineering, Qazvin Islamic Azad
University, Qazvin, Iran.
Mattamala, M., Villegas, C., Y
´
a
˜
nez, J. M., Cano, P., and
Ruiz-del Solar, J. (2015). A dynamic and efficient
active vision system for humanoid soccer robots. In
Robot Soccer World Cup, pages 316–327. Springer.
Michel, O. (2004). Cyberbotics ltd. webots™: professional
mobile robot simulation. International Journal of
Advanced Robotic Systems, 1(1):5.
Mitchell, J. F., Reynolds, J. H., and Miller, C. T.
(2014). Active vision in marmosets: a model system
for visual neuroscience. Journal of Neuroscience,
34(4):1183–1194.
Mnih, V., Kavukcuoglu, K., Silver, D., Rusu, A. A.,
Veness, J., Bellemare, M. G., Graves, A., Riedmiller,
M., Fidjeland, A. K., Ostrovski, G., et al. (2015).
Human-level control through deep reinforcement
learning. nature, 518(7540):529–533.
Rezaei, M. and Klette, R. (2017). Computer vision for
driver assistance. Springer.
Rolfs, M. (2015). Attention in active vision: A perspective
on perceptual continuity across saccades. Perception,
44(8-9):900–919.
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
750

Schaul, T., Quan, J., Antonoglou, I., and Silver, D.
(2015). Prioritized experience replay. arXiv preprint
arXiv:1511.05952.
Schulman, J., Wolski, F., Dhariwal, P., Radford, A., and
Klimov, O. (2017). Proximal policy optimization
algorithms. arXiv preprint arXiv:1707.06347.
Seekircher, A., Laue, T., and R
¨
ofer, T. (2010).
Entropy-based active vision for a humanoid soccer
robot. In Robot Soccer World Cup, pages 1–12.
Springer.
Swain, M. J. and Stricker, M. A. (1993). Promising
directions in active vision. International Journal of
Computer Vision, 11(2):109–126.
Teimouri, M., Delavaran, M. H., and Rezaei, M. (2019). A
real-time ball detection approach using convolutional
neural networks. In Robot World Cup, pages 323–336.
Springer.
Teimouri, M., Salehi, M. E., and Meybodi, M. R. (2016).
A hybrid localization method for a soccer playing
robot. In 2016 Artificial Intelligence and Robotics
(IRANOPEN), pages 127–132. IEEE.
Van Hasselt, H., Guez, A., and Silver, D. (2016). Deep
reinforcement learning with double q-learning. In
Thirtieth AAAI conference on artificial intelligence.
Real-time Active Vision for a Humanoid Soccer Robot using Deep Reinforcement Learning
751
