
TrajNet: An Efficient and Effective Neural Network
for Vehicle Trajectory Classification
Jiyong Oh, Kil-Taek Lim and Yun-Su Chung
Daegu-Gyeongbuk Research Center, Electronics and Telecommunications Research Institute (ETRI), Daegu, Korea
Keywords:
Vehicle Trajectory Classification, TrajNet, Deep Neural Network, Intelligent Transportation System.
Abstract:
Vehicle trajectory classification plays an important role in intelligent transportation systems because it can be
utilized in traffic flow estimation at an intersection and anomaly detection such as traffic accidents and viola-
tions of traffic regulations. In this paper, we propose a new neural network architecture for vehicle trajectory
classification by modifying the PointNet architecture, which was proposed for point cloud classification and
semantic segmentation. The modifications are derived based on analyzing the differences between the prop-
erties of vehicle trajectory and point cloud. We call the modified network TrajNet. It is demonstrated from
experiments using three public datasets that TrajNet can classify vehicle trajectories faster and more slightly
accurate than the conventional networks used in the previous studies.
1 INTRODUCTION
Smart city is one of the important convergence tech-
nologies that need to be developed to improve the
quality of human life. Intelligent transportation sys-
tem (ITS) is a representative technology required
in smart city, which makes it possible for people
to use road traffic networks safely and efficiently
through real-time monitoring and effective traffic con-
trol. Since vehicle trajectory has essential information
about movement direction and speed of vehicles, it
can be used in traffic flow estimation (Lv et al., 2015)
and traffic anomaly detection (Zhao et al., 2019),
which are typical applications of ITS. In this study,
we focus on classifying those vehicle trajectories ex-
tracted by tracking vehicles as in (Ren et al., 2018).
Trajectory classification or clustering has been
studied in various applications such as behavior anal-
ysis (Wang et al., 2008), group detection (Li et al.,
2017), semantic region analysis (Wang et al., 2011),
and traffic vedio surveillence (Morris and Trivedi,
2009), (Hu et al., 2013), (Lin et al., 2017). In
early studies, researchers were mainly interested in
the mathematical representation of trajectories and
the similarity measure between them. In (Porikli,
2004), the authors proposed a new similarity measure
based on the hidden Markov model, and in (Morris
and Trivedi, 2009), six similarity measures were com-
pared and evaluated for trajectory clustering. Also,
in (Hu et al., 2013), the Dirichlet process mixture
model (DPMM) was employed for trajectory analy-
sis such as clustering, modeling, and retrieval. An
incremental method using DPMM was developed to
automatically determine the number of clusters, and
a time-sensitive DPMM was also proposed to en-
code the time-dependent characteristics of trajecto-
ries. In (Xu et al., 2015), an effective and robust
trajectory clustering method was proposed based on
shrinking trajectories. The method consists of an
adaptive multi-kernel estimation process and an op-
timization process. The adaptive multi-kernel estima-
tion process was employed to reduce intra-variation
and enlarge inter-variation between trajectories. And,
the optimization process with speed regularization
was introduced to utilize the shape information of the
original trajectory and the discriminative information
obtained from the estimation based on the adaptive
multi-kernels. Moreover, in (Lin et al., 2017), the
authros presented a novel representation based on a
three-dimensional tube and a droplet process. Given
a set of trajectories, a thermal transfer field was con-
structed to capture global information of the trajecto-
ries, and a three-dimensional tube was generated from
each trajectory using the relation between its points
and the thermal transfer field. Then, the droplet-based
process was applied to provide a low dimensional
droplet vector that encodes the high dimensional in-
formation in the three-dimensional tube.
After the impressive successes of deep neural net-
works such as (Krizhevsky et al., 2012) and (Ren
408
Oh, J., Lim, K. and Chung, Y.
TrajNet: An Efficient and Effective Neural Network for Vehicle Trajectory Classification.
DOI: 10.5220/0010243304080416
In Proceedings of the 10th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2021), pages 408-416
ISBN: 978-989-758-486-2
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

et al., 2015), deep learning-based approaches have
been applied in many studies of various applications
such as human activity recognition (Yang et al., 2015)
and GPS trajectory analysis (Jiang et al., 2017), (Yao
et al., 2017), (Song et al., 2018). In (Yang et al.,
2015), by applying a sliding window, time-series sig-
nals captured by multiple sensors split into a set of
short intervals of multiple signals. The short inter-
vals were represented as two-dimensional matrices
corresponding to the input of a convolutional neu-
ral network (CNN) to solve human activity recogni-
tion problems. In (Jiang et al., 2017), a new method,
TrajectoryNet, was proposed to detect human trans-
portation mode using GPS trajectory. The proposed
method extracted the segment-based features and the
point-based features from GPS data. Then, the fea-
tures of different types were combined and classi-
fied using an RNN based on the bidirectional maxout
gated recurrent units (GRUs). In (Yao et al., 2017), a
deep learning-based representation of trajectory was
presented. In the study, a feature sequence was gen-
erated from a trajectory using a sliding window tech-
nique, and it was transformed into a deep representa-
tion with a fixed-size by a sequence-to-sequence au-
toencoder. The representation was applied in cluster-
ing and analyzing GPS trajectories. In (Song et al.,
2018), taxi fraud detection was addressed using GPS
trajectories. The long short term memory (LSTM)
and GRU cells were utilized in RNN to solve the
problem.
On the other hand, deep neural networks were also
applied in traffic video surveillance (Ma et al., 2018),
(Santhosh et al., 2018). In (Ma et al., 2018), trajectory
distance metrics were presented to measure similari-
ties and detect anomalous trajectories, and an RNN-
based autoencoder was used in computing the met-
rics. Also, two different deep neural networks were
used in (Santhosh et al., 2018). In the method, a CNN
classifies an input trajectory converted into an image
using the gradient conversion method, and a varia-
tional autoencoder decides whether the input trajec-
tory image is an anomaly or not.
In this paper, we propose a deep neural network
architecture to address the vehicle trajectory classifi-
cation. Inspired from PointNet (Qi et al., 2017) that
is a novel neural network proposed for classification
or semantic segmentation of point cloud data, the pro-
posed architecture is derived based on analyzing the
differences between the characteristics of point cloud
and trajectory. We call the new architecture Tra-
jNet. To our best knowledge, this is the first study us-
ing the other network for vehicle trajectory classifica-
tion instead of the conventional neural networks such
as RNN, LSTM, and CNN. We demonstrate by per-
forming experiments that the proposed method yields
slightly better classification performances compared
to the conventional architectures like a vanilla RNN
and an RNN with LSTM unit as well as the CNN with
the gradient conversion method proposed for vehi-
cle trajectory classification in (Santhosh et al., 2018).
Furthermore, it is also shown that the proposed net-
work can classify a trajectory faster than those net-
works.
This paper is organized as follows. In the next
section, a preprocessing method is explained together
with the conventional networks which have been pre-
viously presented for the vehicle or GPS trajectory
classification. The proposed network architecture is
described in Sec. 3. Then, we verify in Sec. 4 that the
proposed network is more effective and efficient than
the other networks employed in the previous studies
for the trajectory classification. Finally, we conclude
this paper in the last section.
2 PRELIMINARIES
2.1 Preprocessing
One of the difficulties in using a trajectory as an input
of neural networks is the fact that the number of points
included in it is not the same. To input an arbitrary
trajectory to a neural network, which has a regular in-
put structure, we generate the input trajectory with M
points using the cubic B-spline curves approximation
as in (Ma et al., 2018). Figure 1 shows an original tra-
jectory and the trajectories generated by the method
when M = 16, M = 32, and M = 64. In the figure,
each point in trajectories is represented as a marker
located at its coordinates on the image. The color of
the points is determined by the gradient conversion
(Santhosh et al., 2018), in which the hue value h of
the i-th point p
i
in a trajectory T = {p
i
= (x
i
, y
i
)}
M
i=1
1
is computed as
h(p
i
) =
i
M
× 180.
The other two values of the HSV color model are set
to 255. We can see from the figure that each trajectory
can be normalized to have a fixed number of points by
the cubic B-spline curves approximation method.
1
Each point in a trajectory can have its time step as p
i
=
(x
i
, y
i
, t
i
), but we do not consider those time steps in this
study.
TrajNet: An Efficient and Effective Neural Network for Vehicle Trajectory Classification
409

(a) Original (b) M = 16 (c) M = 32 (d) M = 64
Figure 1: An original trajectory with M = 26 and the trajectories generated by the normalization based on the cubic B-spline
curves approximation. Best viewed in color.
Figure 2: The architecture of CNN used in this study.
2.2 RNN and LSTM
RNN is a kind of neural network suitable for process-
ing sequential data (Goodfellow et al., 2016). Since
a vehicle trajectory is a sequence of ordered points,
it is straightforward to apply an RNN to the vehicle
trajectory classification. For this reason, we first con-
sider a stacked RNN, and the number of the stacked
RNN layers is set to 3 based on experiments. In each
layer of the stacked RNN, the hyperbolic tangent ac-
tivation function is employed in its 128-dimensional
hidden state. The stacked RNN is connected to an ad-
ditional fully-connected layer with the sigmoid acti-
vation function, and the dimension of the hidden layer
in the fully-connected layer is also set to 128. Fi-
nally, the softmax layer follows the fully-connected
layer for C-class classification. After the normaliza-
tion described in the previous subsection, each point
in a trajectory is input to the stacked RNN at a time,
and for the trajectory, the stacked RNN provides the
C-dimensional vector, each component of which cor-
responds to the probabilities belonging to each class.
However, it is well known that the conventional
RNN has the vanishing gradient problem, which de-
teriorates its learning capability when the length of
sequence data is longer. In order to alleviate the prob-
lem, the LSTM cell has been popularly used instead
of the original RNN cell in practice. Thus, we also
consider another RNN using the LSTM cells as in
(Song et al., 2018) together with the conventional
RNN. The LSTM-based RNN has the same architec-
ture as the stacked RNN mentioned above except for
using the LSTM cell. The two RNNs mentioned in
this subsection will be applied in the vehicle trajec-
tory classification and compared to the different types
of neural networks mentioned later in Sec. 4.
2.3 CNN
CNN was originally developed to classify image data
with a type of grid. Since its remarkable successes in
image classification (Krizhevsky et al., 2012), it has
become very popular in various fields. However, to
classify a trajectory using a CNN, it should have a reg-
ular form with a pre-determined size such as an im-
age. We convert each trajectory into an image shown
in Fig. 1. Then, the generated image is input to the
CNN proposed in (Santhosh et al., 2018). In the im-
age generation, we employ the gradient conversion
mentioned above because it was reported in (Santhosh
et al., 2018) that the conversion method provided an
additional performance increase.
Figure 2 shows the architecture of the CNN used
in this study. The input trajectory image passes
through the four pairs of the convolution and the max-
pooling layers successively. Those convolution lay-
ers have 18, 36, 72, and 144 filters with the size of
2 × 2, and all of the max-pooling layers have the size
of 2×2. The ReLU activation function (Nair and Hin-
ton, 2010) is applied in all of the convolution layers.
By those convolution and max-pooling layers, each
trajectory image becomes a three-dimensional tensor,
which is flattened as a one-dimensional vector to in-
put to the final softmax layer for classification. For
more information, refer to (Santhosh et al., 2018). Al-
though the normalization using the gradient conver-
ICPRAM 2021 - 10th International Conference on Pattern Recognition Applications and Methods
410

(a)
(b)
Figure 3: The archtiectures of PointNet and TrajNet. (a) PointNet for point cloud classification. (b) TrajNet using average-
pooling layer (TrajNet-A) for vehicle trajectory classification. Best viewed in color.
sion and the CNN architecture seem to be simple, it
was verified in (Santhosh et al., 2018) that it provided
better classification performances than other methods
presented for the same purpose.
3 PROPOSED METHOD
According to (Qi et al., 2017), the PointNet archi-
tecture consists of three key modules for point cloud
classification and semantic segmentation. Two mod-
ules among them are related to point cloud classifi-
cation, which is similar to the trajectory classification
addressed in this work. Associated with the two mod-
ules, we pay attention to the differences between the
properties of trajectory and point cloud. One of the
differences is the fact that the points in a trajectory
are ordered in time sequence different from the points
in a point cloud. The next difference is related to the
fact that the point cloud classification should be in-
variant under any rigid transformation, but we do not
have to consider those transformations when classify-
ing a trajectory in this study. Based on the above two
differences, we derive a new network by modifying
the architecture of PointNet. Because of the first dif-
ference, we consider using the average-pooling layer
and the flatten layer along with the max-pooling layer.
Note the fact that only the max-pooling layer is used
in the PointNet architecture as shown in Fig. 3a.
Also, PointNet has the joint alignment networks for
the invariance under rigid transformations, which cor-
respond to the blocks denoted as input transform and
feature transform in Fig. 3a. However, the alignment
network is not used in our architecture based on the
second difference.
Based on the two modifications, we propose the
TrajNet architecture as shown in Fig. 3b. It consists
of three parts, the shared multi-layer perceptrons lay-
ers (MLP), the pooling layers, and the conventional
MLP layers. In the figure, the average-pooling layer
is used, but it can be replaced by the max-pooling
layer or the flatten layer so that the proposed archi-
tecture is named as TrajNet-M, TrajNet-A, or TrajNet-
F when using the max-pooling, the average pooling,
or the flatten layer, respectively. In detail, the size of
each filter in the shared MLPs is set to 1, and the num-
bers of those filters are determined as 16, 32, and 256.
And, we set the dimensions of the two hidden layers
in the conventional MLP to 256 and 128. Each layer
of the shared MLPs and the conventional MLPs em-
ploy the ReLU activation function. The batch normal-
ization (Ioffe and Szegedy, 2015) also follows each
layer of the shared and conventional MLPs. Further-
more, the dropout layer (Srivastava et al., 2014) is
adopted in the two conventional MLPs, and its drop
rate is set to 0.7. Finally, the last layer is the soft-
max for classification. The above values of the pa-
rameters were determined from many trials of exper-
iments. Note that the proposed network has a simple
architecture compared to PointNet and the numbers
of the neurons in the MLPs of TrajNet are reduced to
a quarter or a half as shown in Fig 2. It may seem that
the proposed architecture is obtained by only slight
modifications of the PointNet architecture. However,
it is noticeable that those modifications are based on
analyzing the differences between trajectory and point
TrajNet: An Efficient and Effective Neural Network for Vehicle Trajectory Classification
411
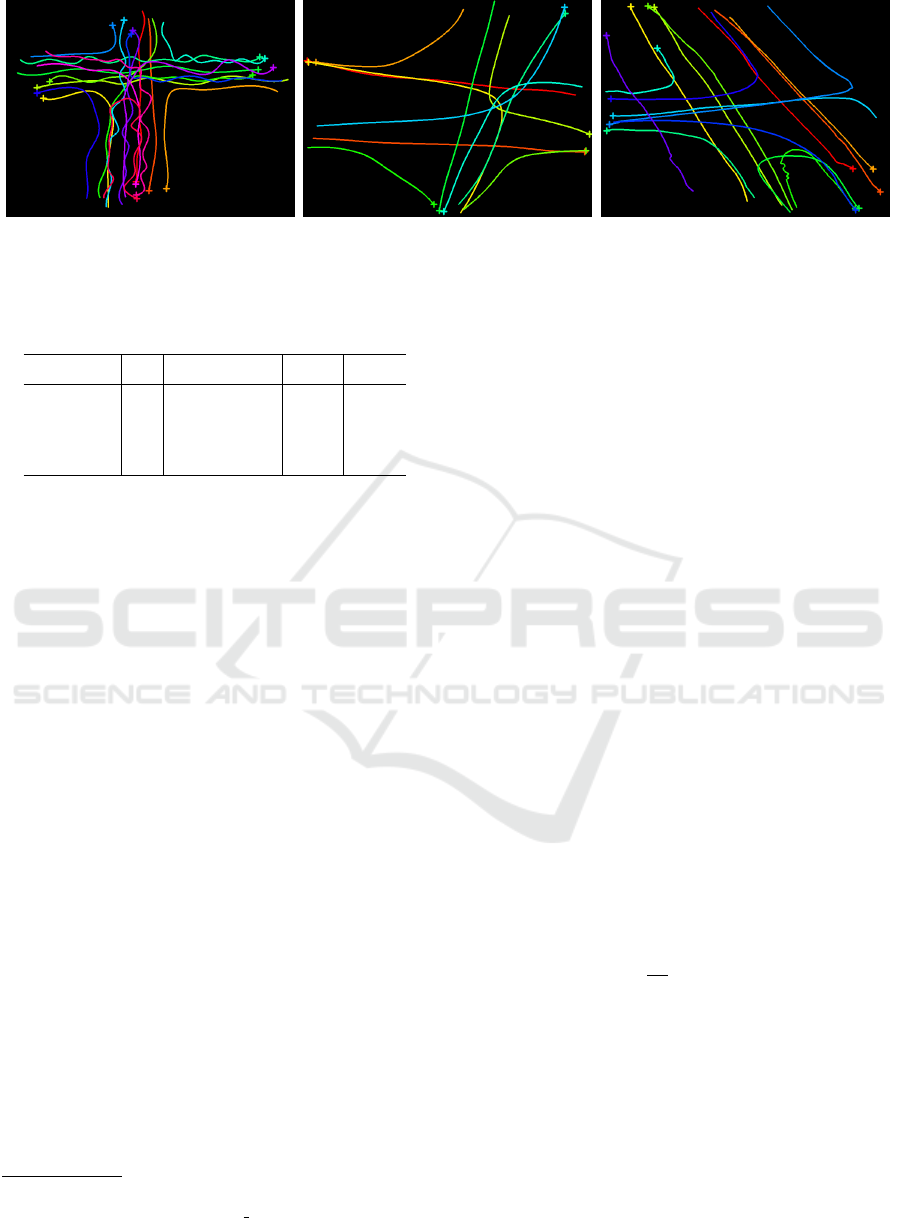
(a) CROSS dataset (b) TRAFFIC dataset (c) VMT dataset
Figure 4: Trajectory examples for three datasets. In the figures, each cross means the starting point of the trajectory. Best
viewed in color.
Table 1: Datasets used in experiments.
Dataset C N
r
N
t
M
min
M
max
CROSS 19 1900 9500 4 30
TRAFFIC 11 300 50 50
VMT 15 1500 16 612
cloud. It will also be verified in the next section that
the proposed network derived by the simple modifi-
cations is more effective and efficient than the other
networks used in the previous studies for vehicle tra-
jectory classification.
4 EXPERIMENTS
We conducted experiments using three datasets
2
to
evaluate the neural networks described in the previ-
ous sections. Table 1 summarizes the three datasets
and Fig. 4 shows the examples of trajectories belong-
ing to each class in each dataset. In the table, C, N
r
and N
t
denote the number of classes, the number of
training trajectories, and the number of test trajecto-
ries, respectively. Also, M
min
and M
max
denote the
minimum and maximum numbers of points included
in a trajectory in each dataset, respectivley. In Fig. 4,
each trajectory is represented as a curve for better vi-
sualization, but it consists of two-dimensional points
in actual. Among the datasets, the CROSS dataset
(Morris and Trivedi, 2009) has the trajectories gener-
ated by simulating vehicle movements at a four-way
intersection. This dataset provides a training set and
a test set separately. Each trajectory belongs to one
of 19 classes, but its test set contains the trajectories
that do not belong to any class in the training set. Al-
though they can be used for anomaly detection as in
2
The datasets were downloaded from https:
//github.com/mcximing/ACCV18 Anomaly/tree/master/
Exp2/datasets
(Ma et al., 2018) and (Santhosh et al., 2018), they
were not used in this study to focus on the trajec-
tory classification. On the other hand, different from
the CROSS dataset, the TRAFFIC (Lin et al., 2017)
and VMT (Morris and Trivedi, 2011) datasets consist
of the real trajectories extracted by tracking vehicles
captured by a mounted intersection monitoring cam-
era. The TRAFFIC and VMT datasets consist of 11
and 15 classes, respectively, as in Table 1.
Another difference between the CROSS dataset
and the other datasets is the fact that the TRAFFIC
and VMT datasets are not divided as the training set
and test set. In this situation, one of the most general
evaluation methodologies is cross validation. We also
performed the two- and five-fold cross validations us-
ing the TRAFFIC and VMT datasets, respectively, to
evaluate the performance of the proposed networks.
In K-fold cross validation, the whole trajectories in a
dataset were divided into K folds. The performance
of each network is evaluated using the trajectories in
a fold after training the network using the trajectories
in the other K − 1 folds. These training and testing
procedures are repeated K times utilizing each fold
for testing and the other folds for training at a time.
We first compared the neural networks mentioned
in the previous sections in terms of classification ac-
curacy. The classification accuracy of a network was
computed as
N
c
N
× 100,
where N
c
is the number of the trajectories that are cor-
rectly classified among the test trajectories and N is
the number of the whole test trajectories. However,
due to the randomness in weight initialization, the
value of N
c
may vary even if the same learning is re-
peated. To avoid the problem, we computed the clas-
sification accuracy whenever the weights of a network
are updated using a mini-batch, and then repeated the
same training and evaluation ten times for a given pair
of the training and test sets. We selected the maxi-
mum value of N
c
to compute the classification accu-
ICPRAM 2021 - 10th International Conference on Pattern Recognition Applications and Methods
412

Figure 5: Classification results for CROSS dataset. Best
viewed in color.
racy in those repetitive training and testing. In the
K-cross validation, the maximum number of the cor-
rectly classified trajectories was selected for each pair
of training and test sets, and the value of N
c
was de-
termined by adding the K maximum numbers for all
of the pairs of the training and test sets.
We implemented all of the methods described in
this section using TensorFlow (Abadi et al., 2015).
The cross entropy was chosen as the loss function in
training all of the networks, and we adopted the Adam
optimizer (Kingma and Ba, 2015) with the learning
rate of 0.001 to minimize (maximize) the loss func-
tion. The size of the mini-batch was set to 100 when
training all of the networks. From many trials of those
network training, the maximum number of epochs
was set to 500, 500, 50, and 400 for RNN, LSTM,
CNN, and TrajNets, respectively. This means that
CNN could be easily trained compared to the other
networks. To examine the relationship between the
number of points in trajectories and the classification
performance, we performed the experiments by vary-
ing the value of M as 16, 32, 64, and 128.
Figures 5, 6, and 7 show the classification ac-
curacies for the CROSS, TRAFFIC, VMT datasets,
respectively. It is shown in Fig. 5 that all of the
networks provided classification accuracies over 99%
on average except for CNN, which showed its aver-
age accuracy of 98.97% for the CROSS dataset. In
particular, TrajNet-A and TrajNet-M, which are the
proposed networks, yielded the best average perfor-
mances over 99.6%, and TrajNet-A obtained the high-
est classification accuracy with M = 16. We can see
that RNN yielded lower classification accuracies as
Figure 6: Classification results for TRAFFIC dataset. Best
viewed in color.
M increases. This agrees with the fact well-known
in the literature that the learning capability of RNN
decreases when the length of the sequence data in-
creases. However, the proposed networks can provide
slightly higher accuracies with the small numbers of
M than RNN, LSTM, and CNN. Since the time re-
quired for the inference of an arbitrary trajectory in-
creases with the value of M, this means that the pro-
posed network can classify trajectories in a shorter
time. Figure 6 shows the classification accuracies of
the networks on the TRAFFIC dataset. Similar to the
CROSS dataset, we can see that CNN provided the
lowest classification accuracies for all the values of
M. Note that the 100% classification accuracy was
obtained by RNN, LSTM, TrajNet-A, and TrajNet-
M when M = 64. However, TrajNet-A and TrajNet-
M yielded the highest average accuracies of 99.67%
and 99.84%, respectively, and TrajNet-M provided
100% accuracy when M = 16 as well as M = 64. Fig-
ure 7 shows the classification accuracies on the VMT
dataset. We can see again that the accuracy of RNN
decreases relatively large as the value of M increases.
On average, TrajNet-A, TrajNet-M, and LSTM pro-
vided the highest accuracies of 99.10%, 99.02%, and
99.00%, respectively. It is notable that TrajNet-A
provided the best accuracies for M = 16, M = 32,
and M = 128. In particular, the highest accuracy
of 99.2% on this dataset was obtained by TrajNet-A
when M = 16. In total, it may seem that the accuracy
improvement of the proposed networks is marginal.
However, the improvements are not meaningless be-
cause RNN, LSTM, and CNN already give very high
accuracies of around 99%.
TrajNet: An Efficient and Effective Neural Network for Vehicle Trajectory Classification
413
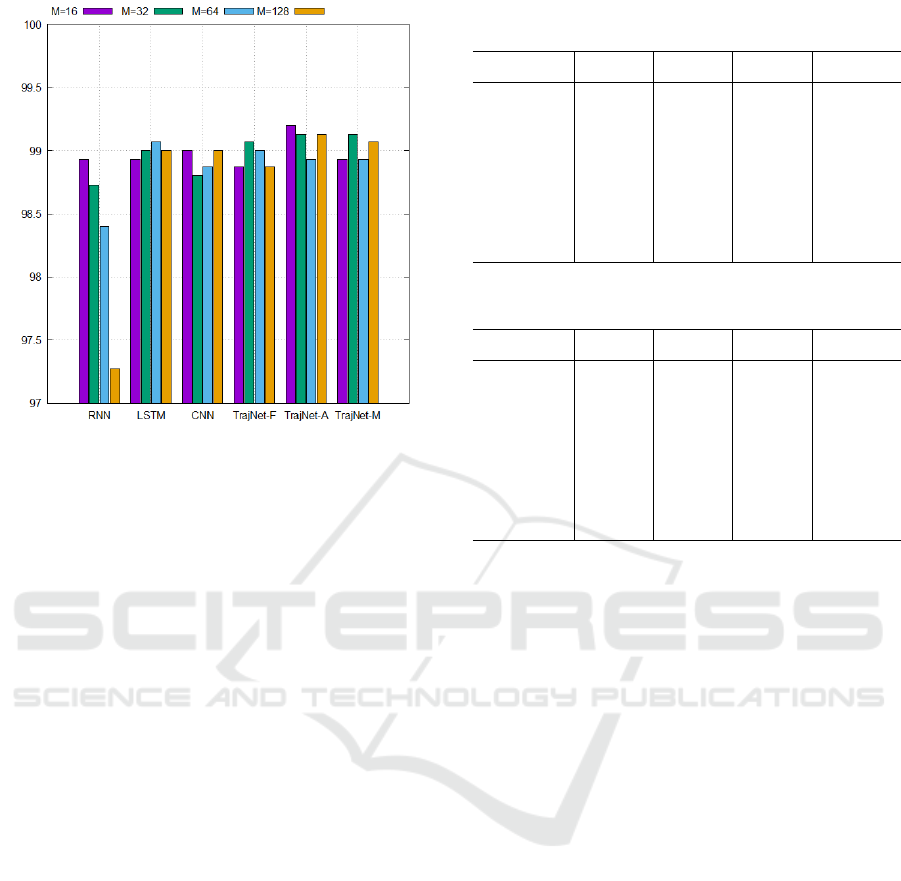
Figure 7: Classification results for VMT dataset. Best
viewed in color.
Together with the classification accuracy, the clas-
sification speed and the number of parameters are also
important performance of classification methods. We
measured the inference time required to classify tra-
jectories and counted the number of parameters in the
networks. Table 2 shows the time to classify the 9500
test trajectories in the CROSS dataset after training
each network for all the values of M. It was mea-
sured on a PC with a GPU of TITAN Xp. In the
case of CNN, the time required in the conversion from
an input trajectory to an image was not included in
the inference time. The table shows that the pro-
posed networks can classify input trajectories faster
than RNN, LSTM, and CNN for each value of M.
In particular, when M = 16, TrajNet-A, which gave
better classification accuracies, required about 40%,
59%, and 45% of the inference times of RNN, LSTM,
and CNN, respectively. Note that those speed im-
provements were achieved together with the improve-
ment in the classification accuracy, not its sacrifice.
As M increases, we can see that the inference time
increases in all of the networks except CNN. How-
ever, the ones of TrajNets increase slower than the
ones of RNN and LSTM. It can be expected from
this result that the trajectory classification based on
TrajNet can be performed much faster than RNN or
LSTM in a situation that the points included in trajec-
tories become more and more. Interestingly, TrajNet-
F showed the fastest inference time even though it
contains the maximum number of parameters for the
same value of M. We expect from this result that the
architecture of TrajNet-F is more appropriate to the
use of GPU than the other architectures. Another su-
Table 2: Inference time required to classify 9500 test trajec-
tories in CROSS dataset (in seconds).
Network M = 16 M = 32 M = 64 M = 128
RNN 2.142 3.687 7.661 15.941
LSTM 1.466 1.713 2.126 2.855
CNN 1.926 1.919 1.923 1.921
TrajNet-F
0.549 0.600 0.615 0.714
TrajNet-A 0.865 0.882 0.971 1.097
TrajNet-M 0.930 0.954 1.017 1.143
Table 3: Number of parameters in network (in thousands).
Network M = 16 M = 32 M = 64 M = 128
RNN 102 102 102 102
LSTM 351 351 351 351
CNN 189 189 189 189
TrajNet-F 1095 2145 4241 8436
TrajNet-A 113 113 113 113
TrajNet-M 113 113 113 113
periority of the proposed networks can be seen in Ta-
ble 3, which summarizes the number of parameters
for each value of M. We can see from the table that re-
gardless of the value of M, the numbers of parameters
included in all of the networks remain the same except
TrajNet-F. Among those networks, the two proposed
networks, TrajNet-A and TrajNet-M, contain the low-
est numbers of parameters except for RNN.
In summary, it was demonstrated from our exper-
imental results on the three datasets that TrajNet can
classify an input trajectory faster and more accurately
than the other deep networks presented in the previ-
ous studies, and the proposed architecture with the
average-pooling or the max-pooling layer can also be
stored in a less memory space than LSTM and CNN.
5 CONCLUSIONS
In this paper, we proposed a new network architecture
to address the vehicle trajectory classification. In-
spired from PointNet (Qi et al., 2017), which has a
novel architecture to deal with point cloud classifica-
tion and semantic segmentation, the proposed archi-
tecture was derived based on analyzing the difference
between the properties of the trajectory and the point
cloud. From our experiments using the three public
datasets, we show that the proposed architecture could
provide slight improvements in the classification ac-
curacy over RNN, LSTM, and CNN, which yielded
ICPRAM 2021 - 10th International Conference on Pattern Recognition Applications and Methods
414

sufficiently high classification accuracies. Further-
more, it was verified that TrajNet-A, one of the pro-
posed networks, could classify the test trajectories of
the CROSS dataset in 40%, 59%, and 45% less time
than RNN, LSTM, and CNN, respectively, under the
setting of M = 16 along with the accuracy improve-
ments. In terms of memory space, TrajNet-A and
TrajNet-M require lower numbers of parameters than
LSTM and CNN. Also, we could see from the exper-
iments that the number of points included in a tra-
jectory has little effect on the classification accuracy
except for RNN.
In future work, the proposed networks will be ap-
plied in classifying the vehicle trajectories extracted
from various real traffic situations with trajectory gen-
eration methods for traffic flow measurement and
anomaly detection at intersections. Moreover, we ex-
pect that the proposed networks can be utilized in
classifying trajectories obtained in other applications
such as online handwriting recognition (Kim and Sin,
2014) and human activity recognition (Anguita et al.,
2013).
ACKNOWLEDGEMENTS
This work was supported by Electronics and Tele-
communications Research Institute (ETRI) grant
funded by the Korean government [20ZD1110, De-
velopment of ICT Convergence Technology for
Daegu-Gyeongbuk Regional Industry].
REFERENCES
Abadi, M., Agarwal, A., Barham, P., Brevdo, E., Chen, Z.,
Citro, C., Corrado, G. S., Davis, A., Dean, J., Devin,
M., Ghemawat, S., Goodfellow, I., Harp, A., Irving,
G., Isard, M., Jia, Y., Jozefowicz, R., Kaiser, L., Kud-
lur, M., Levenberg, J., Man
´
e, D., Monga, R., Moore,
S., Murray, D., Olah, C., Schuster, M., Shlens, J.,
Steiner, B., Sutskever, I., Talwar, K., Tucker, P., Van-
houcke, V., Vasudevan, V., Vi
´
egas, F., Vinyals, O.,
Warden, P., Wattenberg, M., Wicke, M., Yu, Y., and
Zheng, X. (2015). TensorFlow: Large-Scale Machine
Learning on Heterogeneous Systems. Software avail-
able from tensorflow.org.
Anguita, D., Ghio, A., Oneta, L., Parra Perez, X., and Reyes
Ortiz, J. L. (2013). A public domain dataset for human
activity recognition using smartphones. In Proceed-
ings of the 21th International European Symposium
on Artificial Neural Networks, Computational Intelli-
gence and Machine Learning, pages 437–442.
Goodfellow, I., Bengio, Y., and Courville, A. (2016). Deep
Learning. The MIT Press.
Hu, W., Li, X., Tian, G., Maybank, S., and Zhang, Z.
(2013). An Incremental DPMM-Based Method for
Trajectory Clustering, Modeling, and Retrieval. IEEE
Transactions on Pattern Analysis and Machine Intel-
ligence, 35(5):1051–1065.
Ioffe, S. and Szegedy, C. (2015). Batch Normalization: Ac-
celerating Deep Network Training by Reducing Inter-
nal Covariate Shift. In ICML’15: Proceedings of the
32nd International Conference on International Con-
ference on Machine Learning, volume 37, pages 448–
456.
Jiang, X., de Souza, E. N., Pesaranghader, A., Hu, B.,
Silver, D. L., and Matwin, S. (2017). Trajecto-
ryNet: An Embedded GPS Trajectory Representation
for Point-based Classification Using Recurrent Neural
Networks. In Proceedings of the 27th Annual Interna-
tional Conference on Computer Science and Software
Engineering, pages 192–200.
Kim, J. and Sin, B.-K. (2014). Online Handwriting Recog-
nition. In Doermann, D. and Tombre, K., editors,
Handbook of Document Image Processing and Recog-
nition, pages 887–915. Springer London, London.
Kingma, D. and Ba, J. (2015). Adam: A Method for
Stochastic Optimization. International Conference on
Learning Representations (ICLR).
Krizhevsky, A., Sutskever, I., and Hinton, G. E. (2012). Im-
ageNet Classification with Deep Convolutional Neu-
ral Networks. In Advances in Neural Information Pro-
cessing Systems 25, pages 1097–1105.
Li, X., Chen, M., Nie, F., and Wang, Q. (2017).
A Multiview-Based Parameter Free Framework for
Group Detection. In Proceedings of the Thirty-First
AAAI Conference on Artificial Intelligence, pages
4147–4153. AAAI Press.
Lin, W., Zhou, Y., Xu, H., Yan, J., Xu, M., Wu, J., and
Liu, Z. (2017). A Tube-and-Droplet-Based Approach
for Representing and Analyzing Motion Trajectories.
IEEE Transactions on Pattern Analysis and Machine
Intelligence, 39(8):1489–1503.
Lv, Y., Duan, Y., Kang, W., Li, Z., and Wang, F. (2015).
Traffic Flow Prediction With Big Data: A Deep
Learning Approach. IEEE Transactions on Intelligent
Transportation Systems, 16(2):865–873.
Ma, C., Miao, Z., Li, M., Song, S., and Yang, M.-H. (2018).
Detecting Anomalous Trajectories via Recurrent Neu-
ral Networks. In Jawahar, C., Li, H., Mori, G., and
Schindler, K., editors, Computer Vision – ACCV 2018,
pages 370–382, Cham. Springer International Pub-
lishing.
Morris, B. T. and Trivedi, M. (2009). Learning Trajec-
tory Patterns by Clustering: Experimental Studies and
Comparative Evaluation. In 2009 IEEE Conference
on Computer Vision and Pattern Recognition, pages
312–319.
Morris, B. T. and Trivedi, M. M. (2011). Trajectory Learn-
ing for Activity Understanding: Unsupervised, Mul-
tilevel, and Long-Term Adaptive Approach. IEEE
Transactions on Pattern Analysis and Machine Intel-
ligence, 33(11):2287–2301.
TrajNet: An Efficient and Effective Neural Network for Vehicle Trajectory Classification
415

Nair, V. and Hinton, G. E. (2010). Rectified Linear Units
Improve Restricted Boltzmann Machines. In Proceed-
ings of the 27th International Conference on Machine
Learning, pages 807–814. Omnipress.
Porikli, F. (2004). Trajectory Distance Metric Using Hid-
den Markov Model based Representation. In Sixth
IEEE International Workshop on Performance Eval-
uation of Tracking and Surveillance.
Qi, C. R., Su, H., Mo, K., and Guibas, L. J. (2017). Point-
Net: Deep Learning on Point Sets for 3D Classifi-
cation and Segmentation. In 2017 IEEE Conference
on Computer Vision and Pattern Recognition (CVPR),
pages 77–85.
Ren, S., He, K., Girshick, R., and Sun, J. (2015). Faster R-
CNN: Towards Real-Time Object Detection with Re-
gion Proposal Networks. In Advances in Neural Infor-
mation Processing Systems 28, pages 91–99.
Ren, X., Wang, D., Laskey, M., and Goldberg, K. (2018).
Learning Traffic Behaviors by Extracting Vehicle Tra-
jectories from Online Video Streams. In 2018 IEEE
14th International Conference on Automation Science
and Engineering (CASE), pages 1276–1283.
Santhosh, K. K., Dogra, D. P., Roy, P. P., and Mi-
tra, A. (2018). Video Trajectory Classification and
Anomaly Detection Using Hybrid CNN-VAE. CoRR,
abs/1812.07203.
Song, L., Wang, R., Xiao, D., Han, X., Cai, Y., and Shi, C.
(2018). Anomalous Trajectory Detection Using Re-
current Neural Network. In Gan, G., Li, B., Li, X., and
Wang, S., editors, Advanced Data Mining and Appli-
cations, pages 263–277, Cham. Springer International
Publishing.
Srivastava, N., Hinton, G., Krizhevsky, A., Sutskever, I.,
and Salakhutdinov, R. (2014). Dropout: A Simple
Way to Prevent Neural Networks from Overfitting.
Journal of Machine Learning Research, 15:1929–
1958.
Wang, J. M., Fleet, D. J., and Hertzmann, A. (2008). Gaus-
sian Process Dynamical Models for Human Motion.
IEEE Transactions on Pattern Analysis and Machine
Intelligence, 30(2):283–298.
Wang, X., Ma, K. T., Ng, G.-W., and Grimson, W. L.
(2011). Trajectory Analysis and Semantic Re-
gion Modeling Using Nonparametric Hierarchical
Bayesian Models. International Journal of Computer
Vision, 95:287–312.
Xu, H., Zhou, Y., Lin, W., and Zha, H. (2015). Un-
supervised Trajectory Clustering via Adaptive Multi-
kernel-Based Shrinkage. In 2015 IEEE International
Conference on Computer Vision (ICCV), pages 4328–
4336.
Yang, J. B., Nguyen, M. N., San, P. P., Li, X. L., and Kr-
ishnaswamy, S. (2015). Deep Convolutional Neural
Networks on Multichannel Time Series for Human
Activity Recognition. In Proceedings of the Twenty-
Fourth International Joint Conference on Artificial In-
telligence (IJCAI), pages 3995–4001.
Yao, D., Zhang, C., Zhu, Z., Huang, J., and Bi, J. (2017).
Trajectory clustering via deep representation learning.
In 2017 International Joint Conference on Neural Net-
works (IJCNN), pages 3880–3887.
Zhao, J., Yi, Z., Pan, S., Zhao, Y., Zhao, Z., Su, F., and
Zhuang, B. (2019). Unsupervised Traffic Anomaly
Detection Using Trajectories. In The IEEE Confer-
ence on Computer Vision and Pattern Recognition
(CVPR) Workshops.
ICPRAM 2021 - 10th International Conference on Pattern Recognition Applications and Methods
416
