
A Comparison of Few-shot Classification of Human Movement
Trajectories
Lisa Gutzeit
Robotics Research Group, University of Bremen, Bremen, Germany
Keywords:
Few-shot Learning, Movement Recognition, Human Movement Analysis, k-Nearest Neighbor, Long
Short-term Memory, Hidden Markov Model.
Abstract:
In the active research area of human action recognition, a lot of different approaches to classify behavior
have been proposed and evaluated. However, evaluations on movement recognition with a limited number of
training examples, also known as Few-shot classification, are rare. In many applications, the generation of
labeled training data is expensive. Manual efforts can be reduced if algorithms are used which give reliable
results on small datasets. In this paper, three recognition methods are compared on gesture and stick-throwing
movements of different complexity performed individually without detailed instructions in experiments in
which the number of the examples used for training is limited. Movements were recorded with marker-
based motion capture systems. Three classification algorithms, the Hidden Markov Model, Long Short-Term
Memory network and k-Nearest Neighbor, are compared on their performance in recognition of these arm
movements. The methods are evaluated regarding accuracy with limited training data, computation time and
generalization to different subjects. The best results regarding training with a small number of examples and
generalization are achieved with LSTM classification. The shortest calculation times are observed with k-NN
classification, which shows also very good classification accuracies on data of low complexity.
1 INTRODUCTION
Classification of human movements is of high inter-
est in many applications. For example in man ma-
chine interaction, human behaviors, intentions and
habits have to be better understood to facilitate fu-
ture approaches in which humans closely collaborate
with robotic systems. To make an intuitive interaction
possible, methods are needed which analyze naturally
performed human behavior.
In the last decades, many approaches to analyze
video or image data to understand human behaviors
have been presented (Poppe, 2010). Most of these
approaches benefit from a huge amount of available
data. In contrast to human activity recognition in the
wild, there are applications in which smaller move-
ment entities, such as a specific type of grasping, need
to be detected. For example these movement enti-
ties can be used in robotic applications to transfer ba-
sic movement types to a robotic system using, e.g.,
learning from demonstration (LfD) (see, e.g., (Argall
et al., 2009) for an LfD overview). To acquire training
data for these applications, movement demonstrations
need to be recorded, pre-processed and manually la-
beled. These efforts can be minimized if so-called
Few-shot classification methods are used, i.e. meth-
ods that can recognize various behaviors with a small
number of training examples. Additionally, by using
such methods training time as well as the resources
needed for re-training, which can be used, e.g., to ad-
dress newly observed movements, are minimized.
In (Gutzeit et al., 2019b), small entities of hu-
man manipulation movements haven been detected
at high accuracy in different behavior demonstrations
with ≤ 10 examples per class in the training data.
For this, recorded movements were automatically seg-
mented into manipulation building blocks character-
ized by a bell-shaped velocity profile of the hand,
see (Senger et al., 2014) for details. For example,
a ball-throwing movement was segmented into its
three building blocks, strike out, throw, and swing
out. To recognize these building blocks, a classifi-
cation accuracy of 80% could be achieved with a sim-
ple 1-Nearest Neighbor classifier with only 4 train-
ing examples per class (Gutzeit et al., 2019b). Us-
ing this approach, detected movements in pick-and-
place, lever-pulling and different throwing tasks have
been successfully transfered to various robotic sys-
Gutzeit, L.
A Comparison of Few-shot Classification of Human Movement Trajectories.
DOI: 10.5220/0010244002430250
In Proceedings of the 10th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2021), pages 243-250
ISBN: 978-989-758-486-2
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
243

tems (Gutzeit et al., 2018; Gutzeit et al., 2019a).
In this paper, the recognition of different human
arm movements using Few-shot classification is in-
vestigated more closely. Three different algorithms
which are widely used for human action recognition,
the k-Nearest Neighbor classifier, classification based
on Hidden Markov Models and Long Short-Term
Memory networks, are compared. Furthermore, the
generalization of these classifiers to the movements
of persons whose demonstrations were not part of the
training data is analyzed. For evaluation, two different
datasets, containing different gestures and the build-
ing blocks of a throwing movement respectively, are
used. For data recording we use marker-based motion
tracking systems, which measure the positions of im-
portant points on the body directly at a high precision.
This paper is organized as follows: In section 2,
an overview about related work is given. In section 3,
the features and methods used for classification are
described as well as the evaluation approach. The data
recorded and the evaluation results are presented in
section 4 and section 5 respectively. At the end, the
results are discussed and a conclusion is given.
2 RELATED WORK
Human action recognition is an active research area
with a lot of different applications and methods. Most
approaches are based on the analysis of video or
RGB-D data in applications such as the detection of
tackles in soccer games, support of elderly in their
homes, or gesture recognition in video games (Poppe,
2010). In these approaches large efforts have to be
put into the detection of the human and its posture in
the measured data streams. Afterwards, the observed
actions are classified with algorithms such as Sup-
port Vector Machines, or their probabilistic variant the
Relevance Vector Machines, Hidden Markov Models
(HMMs) or k-Nearest Neighbors (k-NN), see (Poppe,
2010) for a detailed overview.
In the last decades, HMMs were widely used to
classify human actions and gestures. For example
in (Stefanov et al., 2010) and (Aarno and Kragic,
2008), HMMs were used to recognize human inten-
tions in teleoperation scenarios. Borghi et al. pro-
pose an online double-stage Multiple Stream Discrete
HMM to classify gestures from 3D joint positions
acquired with a Kinect (Borghi et al., 2016). With
this approach, high classification accuracies could be
achieved on three public and a new recorded data set
containing different actions created for human com-
puter interaction.
Recently, neural network based approaches be-
came popular in all pattern recognition domains.
Patsdu et al. compared a neural network with a Sup-
port Vector Machine, a decision tree, and Naive Bayes
to distinguish the movement patterns stand, sit down,
and lie down recorded with a Kinect camera (Patsadu
et al., 2012). In the huge data set with more than
10.000 recordings, the best performance was reached
with the neural network approach. Long-term mo-
tions in video sequencs were detected in (Shi et al.,
2017) using a method based on a CNN-RNN net-
work. To handle un-reliable data, Liu et al. intro-
duced a new gating algorithm for Long-Short Term
Memories (LSTMs) (Liu et al., 2017). Spatial and
temporal dependencies between joints are learned to
recognize human action in skeleton data. Unreliable
data, which can result from noisy data or occlusions,
are handled with a newly introduced trust gate added
to the LSTM.
However, the majority of the approaches in the lit-
erature are applied to precisely specified movements.
The performance with respect to naturally and intu-
itively performed movements is not analyzed. Fur-
thermore, many approaches rely on huge sets of la-
beled data. If these are not available for a certain ap-
plication, the training datasets have to be manually
generated, which requires a large human effort. To
reduce this effort, algorithms which give reliable re-
sults on small dataset sizes are beneficial. This new
research area is known as Few-shot learning, a survey
is presented in (Wang et al., 2020).
3 METHODS
In this section, the features of the movement trajec-
tories used to distinguish different motions are de-
scribed as well as the classification approaches with
their parameter configurations compared in this paper.
3.1 Feature Extraction
In this work, the human movement is recorded with
markers placed on hand, elbow, and shoulder of the
subject. The positions of the markers can be seen
in Fig. 2 and Fig. 3. All marker positions are trans-
formed into a coordinate system on the back of the
subject to make the positions independent from the
position of the subject in the global coordinate frame.
From each marker, the 3D position and the absolute
velocity are used as features. Depending on the track-
ing system, these values are directly measured or can
be calculated easily from the raw data. Additional
features are the orientation of the hand and the angle
ICPRAM 2021 - 10th International Conference on Pattern Recognition Applications and Methods
244
between lower and upper arm (elbow joint) and the
angle between upper arm and the line connecting the
shoulder and the marker on the back (shoulder joint)
with their corresponding velocities. All feature trajec-
tories are interpolated to a length of 25 using Spline
interpolation. Since the range of the individual fea-
tures varies, all features are normalized to values in
the range [0, 1].
3.2 Classification Methods
3.2.1 k-Nearest Neighbor
We use k-NN for comparison in this work, be-
cause it showed very good results in classification
of small movement units on small training dataset
sizes (Gutzeit et al., 2019b; Gutzeit et al., 2019a).
Additionally, the algorithm does not need much pa-
rameter tuning, as it has just one hyper-parameter k.
To classify the recorded data sequences with k-NN,
the feature trajectories for each movement recording
are transformed into a single feature vector. The clos-
est neighbor of each data sample is determined using
Euclidean distance.
3.2.2 Hidden Markov Model
HMMs are very common probabilistic models for
time series data. A detailed introduction is, e.g., given
by Bishop (Bishop, 2006). In this paper, one HMM
with Gaussian emissions is trained for each class in
the data using the Baum-Welch algorithm. A new
data sample is assigned to the label of the HMM from
which it is most likely generated. For each HMM, the
number of hidden states h has to be set.
3.2.3 Long Short-term Memory
LSTMs are artificial recurrent neural networks espe-
cially designed to process time series data, firstly pre-
sented in (Hochreiter and Schmidhuber, 1997). In
this paper, we use a simple structure with one LSTM
layer. The input layer contains one neuron for each
feature, which is fully connected to the LSTM layer.
As output, a Dense layer with softmax activation
function is used, which has a single neuron for each
class. During training, the categorical cross entropy
is used as error function. To prevent over-fitting, we
apply early stopping and stop training if the accuracy
on a validation dataset did not increase in the last p
epochs, where p is called patience value. For this ar-
chitecture, we compare different numbers of cells, c,
different batch sizes b and patience values p.
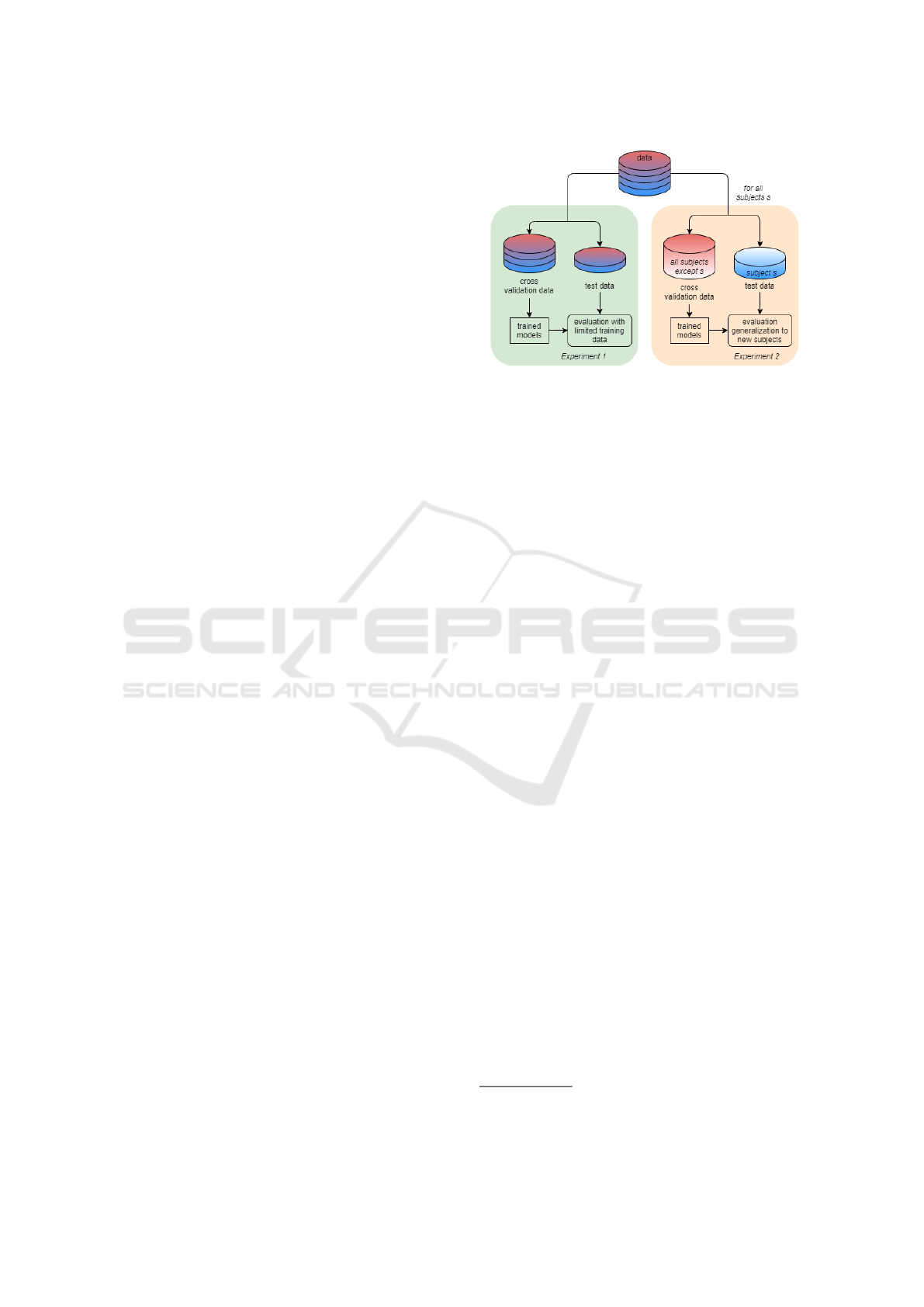
Figure 1: Schematic overview of the evaluation approach
described in section 3.3.
3.3 Evaluation Approach
The three algorithms described in section 3.2 are com-
pared with respect to classification with a small num-
ber of training examples, computation times and gen-
eralization to different subjects on data of different
complexity. For this, two experiments were designed.
A schematic overview is given in Fig. 1.
In experiment 1 the classification accuracy on
small training sizes is evaluated. For this, i samples of
each class are randomly selected and used to train the
classifier. The remaining samples are used for testing.
This is repeated 10 times for each i ∈ 1, ...., 10, 15, 20.
The final models are tested on a test set which was not
part of the cross-validation data, consisting of 10% of
the original dataset. The cross-validation is done for
each classifier with different hyper-parameter values.
The generalization to new subjects is evaluated in
experiment 2. For this, the classifiers are validated
on the data of all subjects except one, using a limited
training set containing i randomly selected examples
of each class for each of the remaining subjects. In
the validation data, the number of examples per class
is fixed to 10 to avoid unbalanced classes. Final mod-
els are tested on the samples of the excluded subject
which movements were left out for training. This is
repeated 10 times for each subject and each limit i.
4 EXPERIMENTAL DATA
4.1 Gesture Data
For the first analysis, different gestures were recorded
with the Xsens MVN Awinda
1
sensor suit, which
measures angular velocities and accelerations, from
1
For more details refer to the vendors websites:
https://www.xsens.com and https://www.qualisys.com
A Comparison of Few-shot Classification of Human Movement Trajectories
245

Figure 2: Recorded gestures. Arrows indicate the direction of the movement. The performed gesture from top right to bottom
left are: come closer, move backwards, move upwards, move downwards, move left, move right, stop, rally, hello, thumbs up,
and thumbs down.
which positions and velocities can be calculated, with
inertial measurement units at 60 Hz. 11 gestures were
recorded from 6 subjects. The gestures are shown in
Fig. 2. The dataset consists of simple gestures such as
stop or thumbs up and of more complex gestures with
repetitive movements like rally. Each gesture was
demonstrated one time to the subjects before record-
ing. Afterwards, each subject performed each gesture
with the instruction to move naturally. For recurring
gestures, such as rally, the number of repetitions was
not specified but intuitively selected by the subject.
In total, each subject performed each gesture 10 −
11 times. For one subject between 30 and 50 rep-
etitions of each gesture were recorded. The gesture
trajectories have a length between 17 and 188 time
points. In total, 1045 examples of different gesture
executions were available for evaluation.
Figure 3: Stick-throwing setup. Positions of markers at-
tached on the arm and the back of the subject are recorded
using a camera based motion tracking system (Image taken
from (Gutzeit et al., 2019a) with permission).
4.2 Stick-throwing Data
As a second dataset we chose throwing demonstra-
tions, previously used in (Gutzeit et al., 2019a), in
which the task was to throw a stick into a box. The
movements of 7 subjects were recorded with a Qual-
isys motion tracking system
1
which uses infrared
light reflecting markers. Markers were attached to the
right hand, elbow, shoulder and back of the subjects,
as shown in Fig. 3. The marker positions were mea-
sured with several cameras at 60 Hz. Three markers
instead of one were attached to the hand and the back
to track also the orientation. The subjects performed
between 41 and 246 throws, which result in a total of
697 stick-throwing samples.
The throwing recordings were automatically seg-
mented using a velocity-based probabilistic segmen-
tation presented in (Senger et al., 2014) into basic
movement units with a bell-shaped velocity. This
resulted in 2913 movement segments. Afterwards,
the resulting segments were manually labeled into the
movement classes strike out, throw, swing out, and
idle. Segments which could not be assigned to one
of these classes were not considered. This resulted
in 2233 labeled segments. The segment trajectories
of the main movements have a length between 10 and
136 time points, where segments of the class idle have
a length between 6 and 269. For each class between
358 and 655 movement examples were available.
4.3 Complexity of the Datasets
In this section, the two datasets are compared with
respect to their structure and variety. For this, the
ICPRAM 2021 - 10th International Conference on Pattern Recognition Applications and Methods
246

(a)
t-SNE Manifold
come closer
hello
move backwards
move downwards
move upwards
next slide
previous slide
rally
stop
thumbs down
thumbs up
(b)
t-SNE Manifold
idle
strike out
swing out throw
Figure 4: T-SNE manifolds of the gesture data (a) and the stick-throwing data (b). Each movement class can be identified by
a different color, samples of the different subjects have different markers.
features of all recordings are transformed into
a two dimensional manifold using t-distributed
Stochastic Neighbor Embedding (van der Maaten
and Hinton, 2008). The result, in which samples with
a low feature distance are close, is shown in Fig. 4.
The manifold transformation of the gesture data can
be seen in Fig. 4a. Although clusters for the different
movement classes can be observed, the clusters of the
11 classes clearly overlap. Additionally, movement
trajectories of different subjects of the same gesture
can be separated in this visualization, as the subject
samples show clusters within one gesture class. Thus,
the generalization to new subjects is a challenging
tasks for this heterogeneous dataset.
On the other hand, the movement classes in stick-
throwing data are separated more clearly, see Fig. 4b.
Although samples of the same class by different sub-
jects can be distinguished in this data, too, the dis-
tances to the other classes are higher. Only the two
classes idle and strike out overlap in the manifold.
This shows the much lower complexity of this data
compared to the gesture data. This has several rea-
sons. First, the gesture data contains more classes and
some of them are very similar in their execution. For
example the movement classes thumbs up and thumbs
down differ only in the orientation of the hand. In
the stick-throwing dataset the task is to throw a stick
to a certain position. This is in contrast to the move-
ments in the gesture set a goal-directed behavior, in
which less variations can be assumed. Furthermore,
the stick-throwing data is segmented into its main
movement blocks characterized by a bell-shaped ve-
locity profile as introduced in (Senger et al., 2014),
which further reduces complexity.
5 RESULTS
5.1 Gesture Classification
The validations on the gesture data were performed
with hyper-parameters set to k ∈ [1, 3, 5, 7, 10, 15, 20]
for k-NN, h ∈ [5, 10, 15, 20, 25] for HMM, and
c ∈ [5, 10, 15, 25, 30, 40, 50, 70] for LSTM with b ∈
[8, 16, 32, 128] and p ∈ [5, 10, 15].
In experiment 1, the classifiers are validated with
a limited number of training examples per class. The
results with limit 10 are shown in Fig. 5. The hyper-
parameters b and p of the LSTM classifier are fixed
to b = 16 and p = 10, which gave the highest accu-
racies. With a maximum of 10 examples per class in
the training data, the best result is achieved with the
LSTM classifier with c = 50 cells, leading to a mean
accuracy of 68%(±0.07%). k-NN with k = 1 has a
similar mean accuracy (67%(±0.4%)). HMM classi-
fication does not achieve an accuracy above 60% with
this small training size. k-NN has the fastest calcu-
lation times, including short prediction times. The
training time of the best LSTM network is around
1000 times slower, but after training the prediction is
similar to 1-NN classification. With HMM training
and prediction takes even longer. Note the different
axis scalings in the visualization of the computation
A Comparison of Few-shot Classification of Human Movement Trajectories
247

1 3 5 7 10 15 20
k
0.4
0.6
0.8
mean accuracy
k-NN
5 10 15 20 25
number of hidden states h
0.4
0.6
0.8
mean accuracy
HMM
5 10 15 25 30 40 50 70
number of cells c
0.4
0.6
0.8
mean accuracy
LSTM
1 3 5 7 10 15 20
k
0.000
0.005
computation time (s)
training times
5 10 15 20 25
number of hidden states h
20
40
computation time (s)
training times
5 10 15 25 30 40 50 70
number of cells c
0.0
2.5
5.0
7.5
computation time (s)
training times
1 3 5 7 10 15 20
k
0.00
0.01
0.02
0.03
computation time (s)
prediction times
5 10 15 20 25
number of hidden states h
0
1
2
3
computation time (s)
prediction times
5 10 15 25 30 40 50 70
number of cells c
0.00
0.01
0.02
0.03
computation time (s)
prediction times
Figure 5: Classification results with limited training examples of the gesture data (experiment 1). Visualized is the classifi-
cation with 10 examples per class. The top row shows the mean accuracy on the test data with different hyper-parameters
of each classifier. Standard deviations are marked as colored areas. In the middle row, the training times are visualized, the
bottom row shows the prediction times.
times in Fig. 5. All computations are run on a single
core 3.7 GHz CPU without parallelization.
In Fig. 6a, the classification results with a number
of examples per class in the training data between val-
ues from 1 to 20 is visualized. Hyper-parameters are
set to k = 1 for k-NN, c = 50 for LSTM and h = 5
for HMM classification. With these configurations,
the highest accuracies could be achieved. The 1-NN
classifier slightly outperforms LSTM classification in
this experiment. With HMM classification accuracies
drop by 10−20%. Especially with very small training
set sizes (≤ 10), HMM is clearly outperformed.
The evaluation results of the generalization to dif-
ferent subjects are shown in Fig. 6b. The LSTM net-
work is the only approach that classifies the samples
of subjects which are not part of the training data at
a high mean accuracy around 90% if more than 4 ex-
amples of each class and each subject are used for
training. The mean accuracy of 1-NN and HMM are
below 50% in this experiment.
5.2 Classification of Stick-throwing
Movements
Because of the lower complexity of the stick-throwing
data, the validation on this data were performed with
hyper-parameters set to k ∈ [1, 3, 5, 7, 10] for k-NN,
h ∈ [2, 5, 10, 15, 20] for HMM, and c ∈ [2, 5, 10, 15, 25]
for LSTM.
With a maximum of 10 examples per class in the
training data, best result is achieved with the LSTM
classifier with c = 25 cells, leading to a mean accu-
racy of 94%(±0.03%). k-NN with k = 1 reaches a
mean accuracy of 88%(±0.03%) and the HMM clas-
sifier has a mean accuracy of 70%(±0.04%) with
h = 2.
With these hyper-parameter settings, the classifi-
cation accuracies with number of example per class
in the training data between values from 1 to 20 is vi-
sualized in Fig. 7a. Like with the gesture data, LSTM
and k-NN classification can deal well with very small
training sets. With these two classifiers, an accuracy
above 80% is reached with only 3-4 examples per
class in the training data. With more examples per
class, only small improvements can be observed. In
comparison, the HMM classifier needs a mimimum of
15 examples per class to achieve the same result.
The results of the generalization capabilities of the
classifiers is shown in the bottom graph of Fig. 7b.
Again, LSTM generalizes best to new subjects with
a mean accuracy above 80%, also with just 6 exam-
ples per class in the training data. In contrast to the
gesture data, k-NN classifier also reaches good accu-
racies which are below the results of LSTM but still
above 80%.
ICPRAM 2021 - 10th International Conference on Pattern Recognition Applications and Methods
248

(a)
1 2 3 4 5 7 8 10 15 20
n examples per class in training data
0.2
0.4
0.6
0.8
1.0
mean accuracy
classification with limited training data
HMM (h = 5)
k-NN (k = 1)
LSTM (c = 50)
(b)
5 10 15 20 25 30 35 40
n examples per class in training data
0.2
0.4
0.6
0.8
1.0
mean accuracy
generalization to different subjects
HMM (h = 5)
k-NN (k = 1)
LSTM (c = 50)
Figure 6: (a) Results of the classification of the gesture data
with small training set sizes. (b) Results of the leave-one-
subject-out cross-validation (experiment 2) on the gesture
data.
6 DISCUSSION AND
CONCLUSION
In the experiments in this paper, LSTM, HMM and
k-NN were compared on movement data of different
complexity with respect to classification with small
training data sizes. Evaluations were performed on
a gesture data set, which show large variations be-
tween subjects, as well as on a data set of stick-
throwing movements. The throwing movements were
simplified by segmenting the movement recordings
into building blocks, which can be used, e.g. in
robotics to equip a system with basic movements us-
ing LfD (Gutzeit et al., 2018).
The results show that with LSTM the best clas-
sification accuracies can be achieved. On the more
heterogeneous gesture data set an accuracy of 80%
is reached with 20 examples per class in the training
data, on the more simple stick-throwing data 10 ex-
amples per class suffice for an accuracy above 90%.
1-NN also shows good classification results, but in
contrast to LSTM it does not generalize well to new
subjects on the gesture recordings. In this dataset, ex-
amples of the same gesture show a high variance be-
tween subjects and the clusters of the classes are more
(a)
1 2 3 4 5 7 8 10 15 20
n examples per class in training data
0.2
0.4
0.6
0.8
1.0
mean accuracy
classification with limited training data
HMM (h = 2)
k-NN (k = 1)
LSTM (c = 25)
(b)
6 12 18 24 30 36 42 48
n examples per class in training data
0.2
0.4
0.6
0.8
1.0
mean accuracy
generalization to different subjects
HMM (h = 5)
k-NN (k = 1)
LSTM (c = 25)
Figure 7: (a) Results of the classification of the stick-
throwing data with small training set sizes. (b) Results
of the leave-one-subject-out cross-validation (experiment 2)
on the stick-throwing data.
difficult to separate (see section 4.2). This makes gen-
eralization to new subjects difficult. On the much
more simple stick-throwing data, which complex-
ity is reduced by using automatic segmentation into
building blocks, the examples of different subjects
of the same movement class are more close and the
movement classes are separated more clearly. How-
ever, 1-NN has fast calculation times, which makes
1-NN classification a clear alternative to the widely
used neural network based approach, as it requires no
hyper-parameter tuning and no architectures have to
be defined. On both datasets, HMM requires more ex-
amples to model the demonstrations well enough for a
good classification result and has higher computation
times.
In conclusion, LSTMs give good results in the
classification of different types of arm movements if
the training is performed on very small training set
sizes. It also generalizes to new subjects in the per-
formed experiments. However, this has to be inter-
preted with caution, as this is highly dependent on
the variations in the examples seen in the training
data. If the data is simple, like the stick-throwing
data analyzed in this paper, 1-NN is a clear alter-
native to LSTM. It requires no hyper-parameter tun-
ing and has faster calculation times on small datasets.
This strengthens our previous experiments on clas-
A Comparison of Few-shot Classification of Human Movement Trajectories
249

sification of manipulation building blocks using 1-
NN (Gutzeit et al., 2019b). While the LSTM network
performs better on data with higher inter-subject vari-
ations, this approach as well as HMM based classi-
fication cannot express their superior capabilities on
sequenced data in the classification of building blocks
of human arm movements.
For future work, a more detailed analysis of the
influence of the segmentation into building blocks to
reduce the complexity of the data, as well as the in-
sights of human movement generation that can be in-
ferred from this, would be of interest. These insights
could help, e.g., to improve the generation of robotic
behavior based on human examples to generate more
flexible robotic systems.
ACKNOWLEDGEMENTS
This work was supported through two grants of the
German Federal Ministry for Economic Affairs and
Energy (BMWi, FKZ 50 RA 1703 and 50 RA 2023).
REFERENCES
Aarno, D. and Kragic, D. (2008). Motion intention recog-
nition in robot assisted applications. Robotics and Au-
tonomous Systems, 56:692–705.
Argall, B. D., Chernova, S., Veloso, M., and Browning, B.
(2009). A survey of robot learning from demonstra-
tion. Robotics and Autonomous Systems, 57(5):469–
483.
Bishop, C. M. (2006). Pattern Recognition and Machine
Learning. Springer-Verlag New York, Inc.
Borghi, G., Vezzani, R., and Cucchiara, R. (2016). Fast
gesture recognition with Multiple Stream Discrete
HMMs on 3D skeletons. Proceedings - International
Conference on Pattern Recognition, pages 997–1002.
Gutzeit, L., Fabisch, A., Otto, M., Metzen, J. H., Hansen,
J., Kirchner, F., and Kirchner, E. A. (2018). The Be-
sMan Learning Platform for Automated Robot Skill
Learning. Frontiers in Robotics and AI, 5.
Gutzeit, L., Fabisch, A., Petzoldt, C., Wiese, H., and Kirch-
ner, F. (2019a). Automated Robot Skill Learning
from Demonstration for Various Robot Systems. In
Benzm
¨
uller, C. and Stuckenschmidt, H., editors, KI
2019: Advances in Artificial Intelligence, Conference
Proc., volume LNAI 11793, pages 168–181. Springer.
Gutzeit, L., Otto, M., and Kirchner, E. A. (2019b). Simple
and robust automatic detection and recognition of hu-
man movement patterns in tasks of different complex-
ity. In Physiological Computing Systems. Springer.
Hochreiter, S. and Schmidhuber, J. (1997). Long short-term
memory. Neural Computation, 9(8):1735–1780.
Liu, J., Shahroudy, A., Xu, D., Kot Chichung, A., and
Wang, G. (2017). Skeleton-Based Action Recognition
Using Spatio-Temporal LSTM Network with Trust
Gates. IEEE Transactions on Pattern Analysis and
Machine Intelligence, 40(12):3007–3021.
Patsadu, O., Nukoolkit, C., and Watanapa, B. (2012). Hu-
man gesture recognition using Kinect camera. Com-
puter Science and Software Engineering (JCSSE),
2012 International Joint Conference on, pages 28–32.
Poppe, R. (2010). A survey on vision-based human action
recognition. Image and Vision Computing, 28(6):976–
990.
Senger, L., Schr
¨
oer, M., Metzen, J. H., and Kirchner,
E. A. (2014). Velocity-based Multiple Change-
point Inference for Unsupervised Segmentation of
Human Movement Behavior. In Proccedings of the
22th International Conference on Pattern Recognition
(ICPR2014), pages 4564–4569.
Shi, Y., Tian, Y., Wang, Y., and Huang, T. (2017). Sequen-
tial Deep Trajectory Descriptor for Action Recogni-
tion with Three-Stream CNN. IEEE Transactions on
Multimedia, 19(7):1510–1520.
Stefanov, N., Peer, A., and Buss, M. (2010). Online inten-
tion recognition for computer-assisted teleoperation.
In Proceedings - IEEE International Conference on
Robotics and Automation, pages 5334–5339.
van der Maaten, L. and Hinton, G. (2008). Visualizing Data
using t-SNE. Journal of Machine Learning Research,
9:2579–2605.
Wang, Y., Yao, Q., Kwok, J. T., and Ni, L. M. (2020). Gen-
eralizing from a Few Examples: A Survey on Few-
shot Learning. ACM Computing Surveys, 53(3).
ICPRAM 2021 - 10th International Conference on Pattern Recognition Applications and Methods
250
