
Improvements to Increase the Efficiency of the AlphaZero Algorithm:
A Case Study in the Game ’Connect 4’
Colin Clausen
2
, Simon Reichhuber
1
, Ingo Thomsen
1
and Sven Tomforde
1
1
Intelligent Systems, Christian-Albrechts-Universit
¨
at zu Kiel, 24118 Kiel, Germany
2
PCT Digital GmbH, Fleeth
¨
orn 7, 24103 Kiel, Germany
Keywords:
AlphaZero, Connect 4, Evolutionary Process, Tree Search, Network Features.
Abstract:
AlphaZero is a recent approach to self-teaching gameplay without the need for human expertise. It suffers
from the massive computation and hardware requirements, which are responsible for the reduced applicability
of the approach. This paper focuses on possible improvements with the goal to reduce the required compu-
tation resources. We propose and investigate three modifications: We model the self-learning phase as an
evolutionary process, study the game process as a tree and use network-internal features as auxiliary targets.
Then behaviour and performance of these modifications are evaluated in the game Connect 4 as a test scenario.
1 INTRODUCTION
Computer games have ever been a fantastic play-
ground for research on artificial intelligence (AI).
With the increasing availability of computing re-
sources and platforms of the last decade, ground-
breaking developments in human-like and even super-
human game playing behaviour have been wit-
nessed. Especially the presentation of AlphaGo (Sil-
ver, Huang et al., 2016) that defeated a world-class
human go player in 2016 (Gibney, 2016) is a mile-
stone towards fully sophisticated games AI.
Subsequently to the breakthrough caused by Al-
phaGo, the AlphaZero algorithm (Silver, Hubert et
al., 2018) significantly simplified the initial AlphaGo
approach. The basic idea was to allow for a learning
concept that starts with a random network and obvi-
ates human expert input of any kind. Despite the suc-
cess of these concepts, we face a massive challenge
that inhibits ubiquitous utilisation of the approach:
The dramatic requirements of computation power.
The goal of this paper is to investigate possibilities
for improvements of AlphaZero’s efficiency, expect-
ing a reduction of hardware and computational cost,
while simultaneously maintaining the generic concept
and the success of AlphaZero. We therefore propose
and investigate three different extensions, which re-
sult in a changed behaviour of the basic AlphaZero
algorithm: We model the self-learning phase as an
evolutionary process, study the game process as a tree
and use network-internal features as auxiliary targets.
The remainder of this article is organised as fol-
lows: Section 2 describes the background of this pa-
per by briefly summarising the state-of-the-art. Sec-
tion 3 develops a baseline for AlphaZero for the game
Connect 4. Afterwards, Section 4 provides the key
contributions of this paper by proposing three dif-
ferent refinements and extensions to the current Alp-
haZero approach and analyses the behaviour. Finally,
Section 5 concludes the article.
2 BACKGROUND
2.1 Monte Carlo Tree Search
With Monte Carlo Tree Search (MCTS) (Br
¨
ugmann,
1993) a large (game) tree is randomly searched to
assess the expected reward for moves starting at the
tree root. The variant UTC (’UCB applied to trees’)
(Kocsis and Szepesv
´
ari, 2006) is used in AlphaZero:
the Upper Confidence Bounds (UCB) algorithm of
the multi-armed bandit problem (Auer et al., 2002)
is used to choose the next move in tree node: Possible
episodes (root to the end of game) are sampled and
the results are propagated back. When playing only
to a fixed tree depth, the positions can be evaluated by
averaging over results from a number of random play-
throughs to the end. Weighting exploitation against
exploration is applied for episode sampling, which in-
crementally improves overall move evaluation.
Clausen, C., Reichhuber, S., Thomsen, I. and Tomforde, S.
Improvements to Increase the Efficiency of the AlphaZero Algorithm: A Case Study in the Game ’Connect 4’.
DOI: 10.5220/0010245908030811
In Proceedings of the 13th International Conference on Agents and Artificial Intelligence (ICAART 2021) - Volume 2, pages 803-811
ISBN: 978-989-758-484-8
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
803

2.2 From AlphaGo to AlphaZero
AlphaGo used a complex system initialisation with
example games, random rollouts during tree searches
and two networks (prediction of position values and
of promising moves). AlphaGo Zero (Silver, Schrit-
twieser et al., 2017) is much simpler by using only
single network without rollouts: The network evalua-
tion for a position is directly used. AlphaZero is ap-
plied to games other than Go and offers further sim-
plification: Instead of comparing the currently trained
network with the previously known best player us-
ing evaluation games, AlphaZero always bases new
games on the current network. The main advantage
of the ’Zero’ versions is the independence from prior
human knowledge (apart from rules). This promotes
strategies without human bias and even enables re-
search on games without human expertise.
2.3 The AlphaZero Algorithm
AlphaZero combines the UTC variant with a deep
neural network to bias tree search and evaluate unfin-
ished games. The network is trained to predict final
results of the MCTS and self-play games by MCTS
against itself. This tends to be slower at first, but the
network is trained to make ”good decisions”. This is
subsequently faster due to using just a single forward
pass. The network creates two outputs from the en-
coded game situation: a policy describing move like-
lihoods and the expected value of the situation. Un-
like plain UTC, AlphaZero does not randomly select
episodes, which besides are not played out until a ter-
minal game state is reached. To steer the MCTS to-
wards moves estimated to be promising by the net-
work, the following statistics are gathered for each
node:
N(s, a) times action a was chosen in state s
W (s, a) total action value
Q(s, a) average action value, equal to
W (s,a)
N(s,a)
P(s, a) probability to play action a in state s
When the analysis of an episode is propagated up-
wards the tree, these statistics are updated. They are
used in the next tree search until it reaches again an
unknown node. When a fixed number of nodes are
created, the output is a distribution of node visits: A
high count implies a worthwhile and thoroughly eval-
uated move. The action a is selected as follows:
argmax
a
(Q(s, a) +U(s, a)) (1)
U(s, a) = C
puct
P(s, a)
p
N(s)
(1 + N(s, a))
(2)
Equation 2 is weighted against exploitation and is
based upon plain UTC, but biased by the network pol-
icy. C
puct
is a game-dependent constant, typically in
[0.5, 5]. Dirichlet noise is added for further explo-
ration in self-play games, pushing the MCTS cau-
tiously to evaluate some random moves more than
others. Games are played out using this tree search:
The policy, resulting game states and outcome are
stored to train the network to predict the final result
and policy. A policy, based upon network and MCTS,
is expected to outperform one produced by only the
network.
A drawback is the massive computational cost. In
practice for playing a single move, the search tree has
to grow to at least hundreds of nodes, each with a cor-
relating forward pass through the network.
2.4 Extensions to AlphaZero
Many proposed enhancements focus on reducing the
computational cost and several of those listed below
originate from the Leela Chess Zero project (LCZero,
2020), a distributed effort to implement AlphaZero
for Chess. Some approaches do not rely on domain-
specific game knowledge, and those denoted by *
were implemented to form a strong AlphaZero base-
line for comparison (see Section 3.3 and 3.4).
Network and Training Modifications. Improving
the neural network design to speed up training, while
retaining the original tower of 20 or 40 residual net-
work blocks with 256 convolutional filters:
1. * The network blocks themselves can be enhanced
with Squeeze-and-Excitation elements (Hu et al.,
2018). A similar approach is used by (Wu, 2020).
2. * Cyclic learning rates as in (Smith, 2017) can be
used to improve the network fitting to the data.
3. Increasing the number of convolutional filters in
the policy head and values from 3 to 32, speeding
up the training (Young, 2019).
Modification of the Tree Search. Different spend-
ing of the available time for analysing game positions.
1. With ’Playout Caps’ (Wu, 2020) the number of
MCTS playouts is randomly and drastically re-
duced for most moves. An acceleration of the
training by 27% is stated.
2. The handling of the search tree can be improved.
One example is the propagation of terminal moves
to simplify the search (Videodr0me, 2019), mod-
erately improving the playing strength.
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
804

3. (Lan et al., 2019) use two networks instead of one.
Unequal sizes (10 resp. 5 residual blocks with 128
resp. 64 convolutional filters), allow the smaller,
faster network to do more search steps in most po-
sitions. This at least doubles the training speed.
4. With constant computational effort, the playing
strength can be increased (Tilps, 2019a) by em-
ploying the Kullback-Leibler divergence of the
policy to identify and focus on complex positions.
Learning Target Modifications. Reducing overfit-
ting and regulating the network training.
1. * (Gao et al., 2020) add a third output head to pre-
dict the win probability for every move. This es-
timate might be of worse quality. Small improve-
ments are claimed.
2. * (Wu, 2020) predict the opponent’s reply to reg-
ularise training – showing modest improvement.
3. * They also argue to add some domain-specific
targets to regularise the learning process, which
shows major improvements.
4. Finally, they guarantee selected nodes a mini-
mum number of further ”Forced Playouts” to pro-
mote exploration. ”Policy Target Pruning” then
removes those from the final policy distribution.
The training speed is shown to increase by 20%.
5. The LCZero project modifies the value target
(Tilps, 2019b) to explicitly predict drawing prob-
abilities: The network can discern between very
likely and unlikely positions.
6. (Young, 2019) proposes to combine the game re-
sults as a learning target with the average value
of the MCTS node, reducing the influence of few
bad moves at the end of the game.
Training Data Enhancements. Improved handling
of the numerous training examples by (Young, 2019).
1. * In some games, like Connect 4, positions can be
duplicated. Averaging the respective targets and
combining them into a single example is useful.
2. * A sudden increase of playing strength occurs
when removing the first training examples, which
were very likely generated by a random network.
Modifying the training windows fixes this.
3 A BASELINE: AlphaZero FOR
CONNECT 4
Connect 4 is a board game where two players, in turn,
let their discs fall straight down to the lowest avail-
able space of a column in a vertical grid, typically of
size 6 × 7. The goal is to create a horizontal, verti-
cal or diagonal line of four of one’s own discs. It is a
game with known a solution for which strong solvers
exists (Prasad, 2019). Therefore, we can evaluate the
strength of AlphaZero by comparing the accuracy on
a set of solved test positions. The network can also be
trained on solved games for maximum performance.
The state space was a 6 × 7 matrix with 4 possible
cell values: 3 (unoccupied), (player) 2 or 1. Also, 0 is
used for padding during convolution. The base imple-
mentation of AlphaZero uses a different network tar-
get for game results, encoding a dedicated value for a
draw. Therefore, the 3 possible outcomes are a win of
either player or a draw. This differs from the output
between zero and one of the original implementation.
There might be a slight change in learning efficiency
caused by this change. However, due to the technical
requirements in the context of the abstraction-driven
framework (to keep the generic capability and not re-
focus it to Connect 4), we changed the implementa-
tion to this additional state.
We started with a basic version of AlphaZero and
adapted it for Connect 4. With a given training set
of played games for a certain state s representing the
state of the game, a neural network directly learns
the move probabilities m
pred
∈ [0, 1]
#moves
. This states
how likely one of the seven possible moves leads to
a win. Furthermore, it learns the outcome of the
game’s test set o
test
. Since the outcome also includes
draws, we extended the test set outcome to a tuple
o
test
= (o
test
win
, o
test
draw
, o
test
loose
) and the predicted outcome
analogously to o
pred
= (o
pred
win
, o
pred
draw
, o
pred
loose
). The vec-
tors of the optimal move were ”one-hot-encoded”:
Only the optimal move and the true outcome are set to
1. With these the the network f
Θ
(s) = (m
pred
, o
pred
)
aims to guarantee (m
pred
, o
pred
) ≈ (m
test
, o
test
) w.r.t.
to an output weighting and regularised loss function
as in (Silver, Schrittwieser et al., 2017):
L
(o
pred
, m
pred
), (o
test
, m
test
)
=
− c
out put
∗
3
∑
i=1
o
test
[i] ∗ log (o
pred
[i])
−
7
∑
j=1
m
test
[ j] ∗ log(m
pred
[ j]) + c
reg
∗
k
Θ
k
2
(3)
The weights were c
out put
= 0.01 and c
reg
= 0.0001
3.1 Experimental Setup
The main goal of this paper is to identify ways to
reduce the substantial costs of training using Alp-
haZero. The majority of GPU capacity is spent on
Improvements to Increase the Efficiency of the AlphaZero Algorithm: A Case Study in the Game ’Connect 4’
805
self-playing games to create training data for the neu-
ral network. This fact was used to simplify the train-
ing cost measurement by ignoring the costs of net-
work training. Instead, only the cost of self-playing
workers was measured. In all experiments, neural net-
work training were done on a single GPU and newly
produced networks were evaluated on another single
GPU. Self-play workers are run on a P2P cloud ser-
vice2 using up to 20 GPUs of various types to com-
plete full training runs for Connect 4 in 2 to 6 hours,
depending on the number of workers. For each exper-
iment a benchmark was run on a reference machine
using the produced networks, measuring how much
time is needed on average to play a single move. This
value was then used to estimate the cost of the ac-
tual number of moves played by the self-play work-
ers during the experiments. The reference machine
uses a single Nvidia RTX 2070S, which was saturated
(100% load) by the benchmark. Thus, all self-play
cost of experiments is stated as estimated time spent
on that machine, limited by its GPU capacity.
3.2 Supervised Training
The generation of the testing set for the learning pro-
cess is an important step that determines how compa-
rable results are to previous work. An important deci-
sion is what should be considered a correct move in a
given situation. In Connect 4, a player has many posi-
tions where she has multiple ways to force a win, but
some lead to a longer game before the win is forced.
To evaluate this (Young, 2019) defines two test sets:
• The strong test set only considers a move correct
if it yields the fastest win resp. the slowest loss.
• The weak test set only cares about the move pro-
ducing the same result as the best move, no matter
how much longer the win will take or how much
faster the loss will occur.
For training a dataset of 1 million game positions
was generated by playing 50% random moves and
50% perfect moves determined by a solver (Pons,
2020). This is substantially harder than a dataset cre-
ated using 90% perfect and only 10% random moves,
which appears to be mainly a result of the distribu-
tion of game length as fewer random moves produce
a dataset with more positions late in the game, while
more random moves cause more positions to be in the
early game. No duplicates, without trivial positions
and only the strongest possible moves were accepted
as correct. Two versions of the dataset were gener-
ated. In version 1, all positions of played games are
used for training, while in version 2, only one single
position is randomly picked from each played game.
This substantially increased the number of distinct
games played. For both dataset versions, 800 000 ex-
amples were used as training data and 100 000 exam-
ples as validation data. The remaining 100 000 exam-
ples were utilised as test data. We achieved the high-
est accuracy of correctly assigned outcomes by using
a network with 20 ResNet blocks (see Table 1).
Table 1: Results of supervised training and accuracy com-
pared to a Connect 4 solver. The column named N lists the
number of used ResNet blocks, Pr
v
1
,v
2
move, win
are the move and
win probabilities of training set version 1 v
1
resp. 2 v
2
.
N # params Pr
v
1
move
Pr
v
1
win
Pr
v
2
move
Pr
v
2
win
5 1.57e6 91.63% 77.47% 92.44% 79.23%
10 3.05e6 92.37% 77.87% 93.00% 79.67%
20 6.01e6 92.68% 78.23% 93.49% 79.93%
3.3 Extended AlphaZero
We analysed known AlphaZero extensions (see Sec-
tion 2.4) in addition to Connect 4 specific modifica-
tions from (Prasad, 2019). In detail, successful exten-
sions are presented in the remainder of this section.
Remove Duplicate Positions. Merging duplicate
positions is proposed by (Prasad, 2019). We imple-
mented this by using the training worker. Only new
positions are added to the pool of training examples;
previously known positions instead update the target
value for that position. A z
duplicate
produced by a self-
play worker is sent to the training worker, which up-
dates the new target values z
new
with the duplicate’s
old target values z
old
, weighted by w
duplicate
:
z
new
= z
old
∗ (1 − w
duplicate
) + z
duplicate
∗ w
duplicate
(4)
Figure 1 shows tests for some w
duplicate
= 0.2, 0.5, 0.8:
2 4 6 8 10 12 14 16 18
Estim at ed cost in h ours
84
85
86
87
88
89
90
91
92
MCTS accuracy %
Dedu p licat ion with different weight fact ors
Accuracy
base
weight 0.2
weight 0.5
weight 0.8
Figure 1: Comparison of different choices for w
duplicate
. For
all further experiments 0.8 was chosen.
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
806
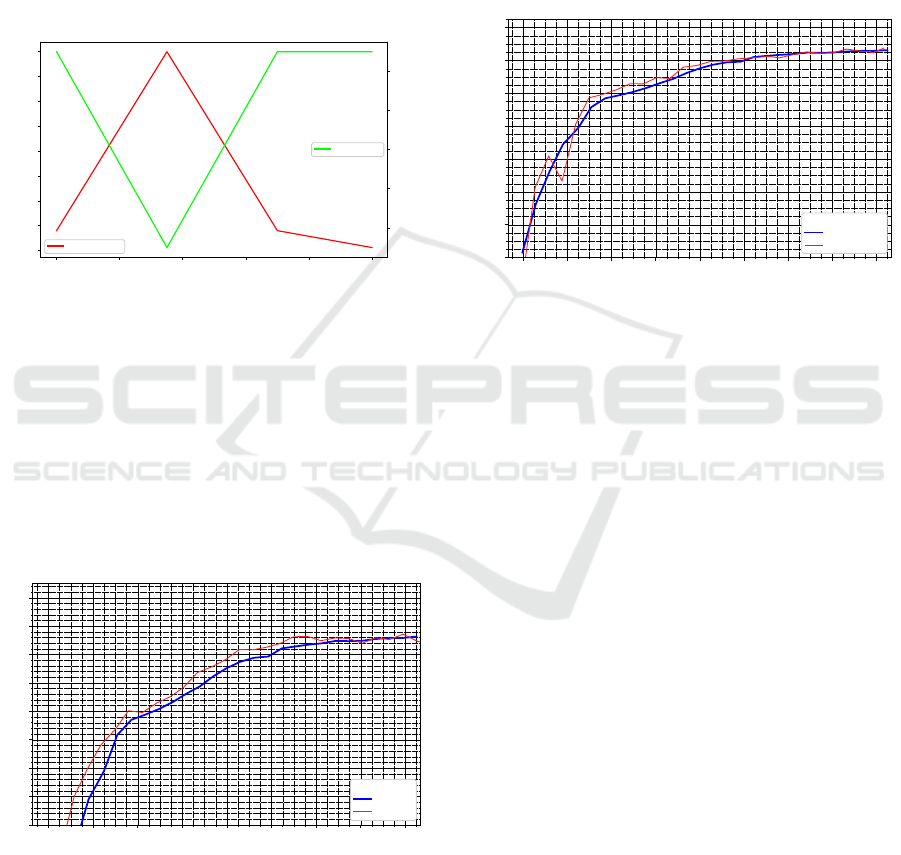
Cyclic Learning Rate. To speed up general neu-
ral network training, (Smith, 2017) proposed cycli-
cal learning rates. (Prasad, 2019) suggests some im-
provements in the context AlphaZero. Based on these
claims, cyclic learning rates and cyclic momentum
were used for AlphaZero as a potential addition to the
extended baseline. The cycles are spread over a single
training iteration. The values are updated by previous
runs to determine the maximum and minimum useful
learning rates. Their curve can be seen in Figure 2.
0.0 0.2 0.4 0.6 0.8 1.0
0.000
0.025
0.050
0.075
0.100
0.125
0.150
0.175
0.200
Learning rat e
Learning rat e
0.86
0.88
0.90
0.92
0.94
Mom entum
Cyclic learnin g rat e and m om ent um
Mom entum
Figure 2: Change of learning rate and momentum over the
training of a new network when using cyclic learning rates.
Additionally, the learning rate is annealed down with
a multiplicative factor that drops linearly with the
number of network iterations. It starts at 1 in iteration
1 and reaches 0.4 in iteration 20. Beyond that, the
factor stays at 0.4: At iteration 20 and later, the maxi-
mum learning rate is 0.08. This annealing accommo-
dates the fact that in later parts of training the learning
rate should be smaller in general. This improvement
accelerated the learning as seen in Figure 3.
2 4 6 8 10 1 2 14 1 6 18
Estim at ed cost in hou rs
84
85
86
87
88
89
90
91
92
MCTS accuracy %
Cyclic learn ing r ate
Accuracy
base
cy clic_lr
Figure 3: Comparison of the usage of cyclic learning rates
and momentum with the baseline.
Improved Training Window. Similar to (Prasad,
2019) a slow training window starts with a size of
500000 examples, growing between iteration 5 and 12
up to the maximum size of 2 million examples. This
causes early examples to be removed by iteration 3.
This is useful as those are very close to random play.
The slow window was added to the extended base-
line, since it seemed to have no harmful effect (see
Figure 4) and follows a sound idea. As the extended
baseline uses a training window without duplicate po-
sitions, the parameters were modified to grow from it-
eration 5 to 15, since the number of new examples per
iteration is lower.
2 4 6 8 10 12 14 16 18
Estim at ed cost in h ours
78
80
82
84
86
88
90
92
MCTS accuracy %
Slow tr aining window
Accuracy
base
slow window
Figure 4: Comparison of the usage of a slow training win-
dow with the baseline.
Predicting the Reply of the Opponent. (Wu,
2020) also, show that predicting an opponent’s reply
to a position produces a modest but clear benefit, by
adding a term to the loss function to regularise train-
ing:
−w
opp
∑
m∈moves
π
opp
(m)log (
ˆ
π
opp
(m)) (5)
π
opp
is the policy target for the turn after the current
turn,
ˆ
π
opp
is the network prediction of π
opp
and w
opp
is a weight for the loss term. Based on preliminary
experiments, 0.35 was used. Figure 5 shows the re-
sults of testing this on Connect 4. There appears to be
a small advantage for some parts of the run, which is
why this was made part of the extended baseline.
Improved Network Structure. The Leela Chess
Zero project proposes using squeeze-and-excitation
elements in the network. This is a general devel-
opment of deep neural networks (Hu et al., 2018)
and shall improve the accuracy of correctly predicted
game outcomes compared to the baseline. A result
of a test run can be seen in Figure 6. There might
be some gains early during the training and possibly
some small losses later on.
Since this did not seem to reduce performance
much – and intuitively should help, especially given
more distinct training data from de-duplication – the
Improvements to Increase the Efficiency of the AlphaZero Algorithm: A Case Study in the Game ’Connect 4’
807

2 4 6 8 10 12 14 16 18
84
85
86
87
88
89
90
91
92
MCTS accuracy %
Predict the op ponent's reply
Accuracy
base
Playout Caps
Figure 5: Results of implementing the predictions of the
opponent’s reply.
2 4 6 8 10 1 2 14 1 6 18
Estim at ed cost in hours
84
85
86
87
88
89
90
91
92
MCTS accuracy %
Squ eeze and Excite ResNet
Accuracy
base
Squ eeze and Excite
Figure 6: Results of predictions of squeeze-and-excitation.
squeeze-and-excite elements were added to the ex-
tended baseline. The network structures can be seen
in Table 2.
3.4 Establishing the Baselines
Various baselines needed to be defined and imple-
mented for the comparison. Using supervised train-
ing for the networks allowed for the exploration of
the maximum possible performance: A plain Alp-
haZero baseline showed how the original algorithm
performed and a baseline of AlphaZero, extended
with a set of previously known improvements, shows
the progress compared to the original algorithm.
As our goal is to find AlphaZero extensions low-
ering the training costs of such an algorithm, we pro-
vided a baseline measurement on how much time is
needed on average to play a single move. This value
was then used to estimate the cost of the actual num-
ber of moves played by the self-play workers during
the experiments (see Figure 7).
Table 2: The final architecture, including the modifications
of (Silver, Hubert et al., 2018). Squeeze-and-excite add
pooling to the residual blocks, which averages every fea-
ture map to a single scalar value. These are then processed
by fully connected layers without bias, activated by ReLU
and Sigmoid. x × y × z describes a convolution with ker-
nel size x × y and z filters. FC : x denotes a fully connected
layer with x neurons. Addition describes the addition with
the input of the residual block forming the residual structure
of the block. Both the win prediction and the move policy
output are connected to the output of the last residual block.
Description base extended
Initial block
3 × 3 × 64
BatchNorm
ReLU
—’—
Adaptor convolution
1 × 1 × 128
—’—
Residual block,
repeated N times
3 × 3 × 128
BatchNorm
ReLU
3 × 3 × 128
BatchNorm
Addition
ReLU
3 × 3 × 128
BatchNorm
ReLU
3 × 3 × 128
BatchNorm
AVGPooling
FCnb : 8
ReLU
FCnb : 128
Sgmoid
Addition
ReLU
Move policy output
3 × 3 × 32
FC : 7
LogSoftMax
—”—
Win prediction
output
3 × 3 × 32
FC : 3
LogSoftMax
—”—
5 10 15 20 25
84
85
86
87
88
89
90
91
92
MCTS accuracy %
Baselines, hard d ataset
Accuracy
ex t ended
base
Figure 7: Comparison of the baseline and the extended
baseline. Mean was only calculated until either run stops
showing improvements.
4 THREE EXTENSIONS FOR
AlphaZero
4.1 Playing Games as Trees
The first extension focuses on how AlphaZero plays
games and implements a distributed approach: In-
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
808

stead of many machines playing independent games,
only one plays all the games and requests from a ser-
vice an MCTS evaluation, which is distributed across
multiple machines instead. This service can easily fil-
ter out duplicate evaluations, increasing the efficiency
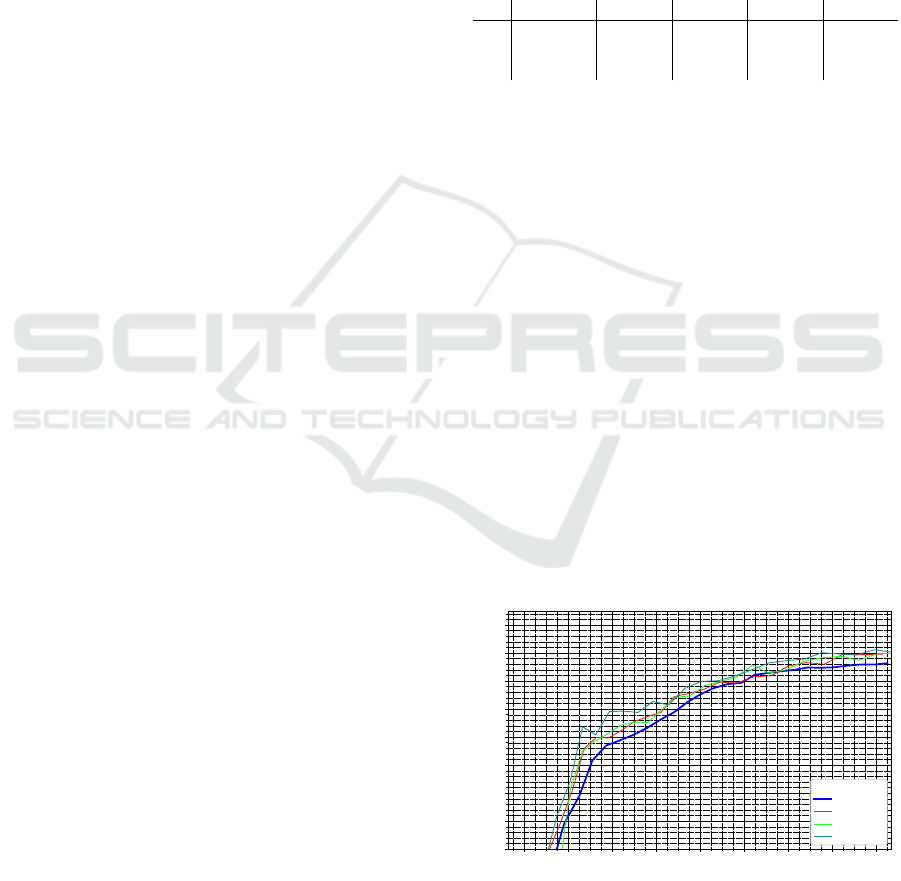
compared to the extended baseline (see Figure 8).
Figure 8: The MCTS evaluation service is more efficient
compared to the AlphaZero baseline.
This filtering allows for further tuning: For a lost
game the position can be reset, tweaking the search
for alternatives: In case of a bad path (due to losing),
we want to identify more promising strategies from
here. However, the experiments showed that this did
not result in significant improvements.
With a focus on the tree size, we grew one large
MCTS tree and used its nodes as learning positions
– again to explore more alternative paths for better
coverage. However, the results showed no significant
improvement: MCTS seems to gets stuck on certain
typical games and stops exploring. It nevertheless ex-
plores quite well during the early training phase (see
Figure 9). More precisely, using MCTS in this way
causes a quick spike in game diversity. It then quickly
drops as it settles into a certain style of play, from
which it never shifts away again. Seemingly, a short
boost is possible but long-term success is not visible.
Section 5 will outline how to combine these two steps
in future work.
4.2 Network-internal Features as
Auxiliary Targets
The second approach uses network-internal features
as auxiliary targets. Generally, domain-specific fea-
tures can be beneficial but are not easy to obtain with-
out human design. So, we tried to automate this and
applied deep neural networks, which are known to
learn good features in other tasks (e.g. image recog-
nition). We performed a full AlphaZero training run
Figure 9: Replacing self-play with one large MCTS which
tends to get stuck on a few game paths and stops exploring.
This reduces the diversity of encountered game positions
and even massively increasing C
puct
does not prevent this.
with a tiny network on a single machine and used
its internal features to regulate the training targets.
For additional benefit, we analysed them using two
features from the future: The playout of full games
and applying the small network to all the states in the
game, with which the features for each position can be
found. A larger network can be trained for a limited
prediction of the smaller network’s feature output.
The small network uses only a single filter in the last
convolutional layer, that has two distinct output-heads
(of the 6 × 7 network fields): Policy and game output
prediction with 42 features each. These features, that
correspond to the future (single player) moves 2 and
4, are then to regulate the bigger network: A squared
error is added to the training loss for calculating the
mean squared error between auxiliary feature and an
internal layer of the big network, to which no addi-
tional parameters are added – only the internal layer
from which the features in the small network were
taken is regularised to get the same features in the
bigger network. For evaluation, we performed a set
of supervised runs and identified the most promising
candidates – which turned out to provide a very small
0.2% absolute improvement in test accuracy, which
outside the typical run-to-run variance. Within the
full AlphaZero setting the improvements could not be
generalised: The extended baseline mostly remained
better than the novel variant as shown in Figure 10.
Since the novel approach was surprisingly inef-
fective we examined more closely: The 2 hours train-
ing time for the small network, to obtain the features,
was rather expensive and made a huge difference. As
this can explain the effect, we tried to fix it by growing
the network during the run (see Figure 11). However,
the effect remains. Additionally, we can observe that
using the small network to regularise the large one
causes consistent issues later in the training, reducing
the final accuracy. This seems to be the root of the
limited applicability of the approach. Again, future
Improvements to Increase the Efficiency of the AlphaZero Algorithm: A Case Study in the Game ’Connect 4’
809
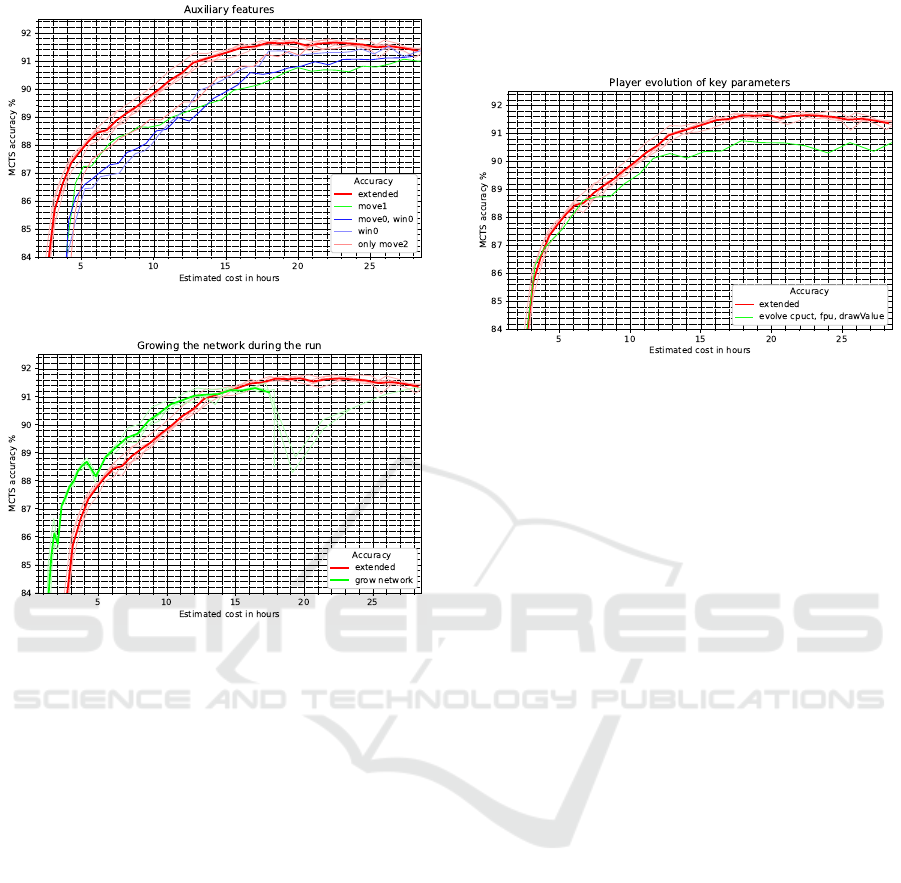
Figure 10: Using auxiliary features from a smaller network.
Figure 11: Growing the network as the run progresses in-
creases efficiency, but the steps up to a bigger network cause
a temporary drop in accuracy, especially towards the end.
work will focus on ways to tackle these inconsisten-
cies to harvest the potential benefits.
4.3 Self-playing Phase as Evolutionary
Process
The third extension focuses on the self-playing phase
of AlphaZero: Using played games to evaluate differ-
ent hyperparameter sets on the fly. This re-utilisation
comes without any extra computational costs. There-
fore, we modelled the hyperparameter sets as play-
ers, which play in a league with Elo rating: The most
promising candidates (’best players’) are evolved us-
ing Gaussian mutation. We use the MCTS-related hy-
perparameters as a basis for the investigation as they
can be changed easily for every game played.
In future work, we will further investigate which
other hyperparameters can be handled and show
promising results. Here, we investigated how to con-
trol the reasoning period of the algorithm using a
threshold on the Kullback-Leibler divergence on the
development of the policy found by MCTS with the
initial results outlined in Figure 12, although no sig-
nificant improvements were found.
Figure 12: Initial results of evolving hyperparameters.
Consequently, we analysed if the evolution itself
works. To verify the implementation of the evolu-
tion, we added an ’artificial’ additional hyperparam-
eter with a known value. This artificial parameter
was perfectly optimised, meaning that the evolution
itself works. Issues occurred with optimising towards
winning games since this does not correlate with the
metric used to determine the training progress and
the accuracy against the Connect 4 solver. Therefore,
we compared different hyperparameter sets found in
1000 matches: The hyperparameters found by the
evolution won more games, but in turn, played worse
according to the Connect 4 solver.
Motivated by this observation, we investigated us-
ing novelty search as an evolution fitness function.
This novelty-driven process identifies marginally
more new game-play than the parameters found by
the original baseline, which was determined with
Bayesian hyperparameter optimisation. From these
outcomes, it can be stated that the original hyperpa-
rameters have already been optimised rather for game
novelty. Figure 13 illustrates the achieved results.
5 CONCLUSIONS
This paper motivated the need for efficient and scal-
able modifications of the state-of-the-art technique
AlphaZero with the observation of a limited applica-
tion due to the massive hardware demands.
We, therefore, reviewed the most prominent algo-
rithm extensions to develop a baseline for further ex-
periments. Based on this, we presented three differ-
ent concepts for reducing the necessary efforts: We
proposed to model the self-learning phase as an evo-
lutionary process, we studied the game process as a
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
810
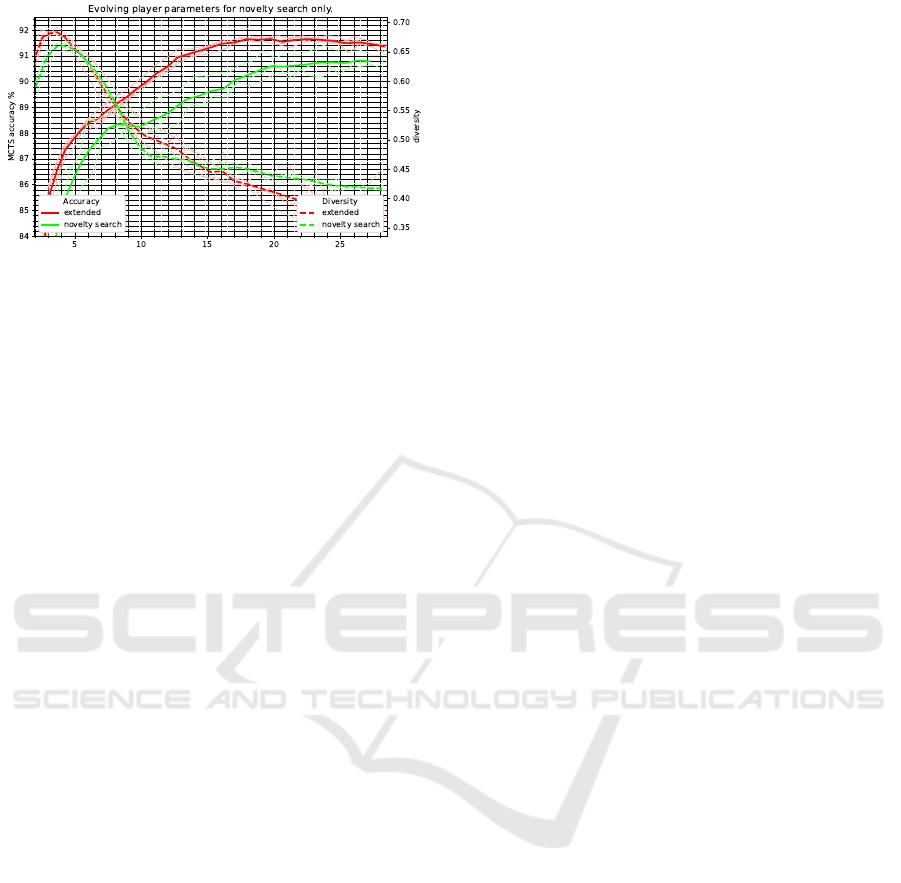
Figure 13: Even pure novelty search only produces more
novel games towards the end of the training. The baseline
parameters were likely to be already implicitly optimised
for game diversity by the initial Bayesian hyperparameter
optimisation aiming to learn efficiently.
tree and used network-internal features as auxiliary
targets. We showed that, although the effort could be
decreased slightly, the benefit is mostly only small.
Our future work follows two directions: We want
to further analyse possible improvements of Alp-
haZero, e.g. based on the Connect 4 scenario, and
we want to investigate the applicability to real-world
control problems. For the first path, we identified
an approach of growing the network more system-
atically as a possibly beneficial extension. Alterna-
tively, a more sophisticated fitness function for the
evolutionary self-playing phase could provide a more
suitable trade-off between heterogeneity and conver-
gence. For the second path, we will investigate if such
a technique is applicable to real-world control prob-
lems ( D’Angelo, Gerasimou, Gharemani et al., 2019)
as given by self-learning traffic light controller (Som-
mer et al., 2016) or smart camera networks (Rudolph
et al., 2014).
REFERENCES
D’Angelo, Gerasimou, Gharemani et al. (2019). On learn-
ing in collective self-adaptive systems: state of prac-
tice and a 3D framework. In Proc. of SEAMS@ICSE
2019, pages 13–24.
Auer, P., Cesa-Bianchi, N., and Fischer, P. (2002). Finite-
time analysis of the multiarmed bandit problem. Ma-
chine learning, 47(2–3):235–256.
Br
¨
ugmann, B. (1993). Monte Carlo Go. www.ideanest.com
/vegos/MonteCarloGo.pdf .
Gao, C., Mueller, M., Hayward, R., Yao, H., and Jui, S.
(2020). Three-Head Neural Network Architecture for
AlphaZero Learning. https://openreview.net/forum?i
d=BJxvH1BtDS.
Gibney, E. (2016). Google AI algorithm masters ancient
game of Go. Nature News, 529(7587):445.
Hu, J., Shen, L., and Sun, G. (2018). Squeeze-and-
excitation networks. In Proc. of IEEE CVPR, pages
7132–7141.
Kocsis, L. and Szepesv
´
ari, C. (2006). Bandit based Monte-
Carlo planning. In European conference on machine
learning, pages 282–293. Springer.
Lan, L.-C., Li, W., Wei, T.-H., Wu, I., et al. (2019). Multiple
Policy Value Monte Carlo Tree Search. arXiv preprint
arXiv:1905.13521.
LCZero (2020). Leela Chess Zero. http://lczero.org/.
Pons, P. (2020). https://connect4.gamesolver.org and
https://github.com/PascalPons/connect4. accessed:
2020-10-02.
Prasad, A. (2019). Lessons From Implementing AlphaZero.
https://medium.com/oracledevs/lessons-from-imple
menting-alphazero-7e36e9054191. accessed: 2019-
11-29.
Rudolph, S., Edenhofer, S., Tomforde, S., and H
¨
ahner, J.
(2014). Reinforcement Learning for Coverage Opti-
mization Through PTZ Camera Alignment in Highly
Dynamic Environments. In Proc. of ICDSC’14, pages
19:1–19:6.
Silver, Huang et al. (2016). Mastering the game of Go
with deep neural networks and tree search. Nature,
529(7587):484–489.
Silver, Hubert et al. (2018). A general reinforcement
learning algorithm that masters chess, shogi, and Go
through self-play. Science, 362(6419):1140–1144.
Silver, Schrittwieser et al. (2017). Mastering the
game of Go without human knowledge. Nature,
550(7676):354.
Smith, L. N. (2017). Cyclical learning rates for training
neural networks. In 2017 IEEE Winter Conference on
Applications of Computer Vision (WACV), pages 464–
472. IEEE.
Sommer, M., Tomforde, S., and H
¨
ahner, J. (2016). An Or-
ganic Computing Approach to Resilient Traffic Man-
agement. In Autonomic Road Transport Support Sys-
tems, pages 113–130. Springer.
Tilps (2019a). https://github.com/LeelaChessZero/lc0/pull
/721. accessed: 2019-11-29.
Tilps (2019b). https://github.com/LeelaChessZero/lc0/pull
/635. accessed: 2019-11-29.
Videodr0me (2019). https://github.com/LeelaChessZero/lc
0/pull/700. accessed: 2019-11-29.
Wu, D. J. (2020). Accelerating Self-Play Learning in Go.
Young, A. (2019). Lessons From Implementing AlphaZero,
Part 6. https://medium.com/oracledevs/lessons-from
-alpha-zero-part-6-hyperparameter-tuning-b1cfcbe
4ca9a. accessed: 2019-11-29.
APPENDIX
The framework and the experimental platform
for distributed job processing are available at:
https://github.com/ColaColin/MasterThesis.
Improvements to Increase the Efficiency of the AlphaZero Algorithm: A Case Study in the Game ’Connect 4’
811
