
Sensorless Coil Temperature Measurements using Neural Networks
for Voltage Control
Linus Taenzer
1 a
, Chafic Abu-Antoun
2 b
and Jasmin Smajic
1 c
1
Institute of Electromagnetic Fields, ETH Zurich, R
¨
amistrasse 101, Zurich, Switzerland
2
DAS Data Science, ETH Zurich, R
¨
amistrasse 101, Zurich, Switzerland
Keywords:
Linear Induction Actuator, Virtual Sensor, Artificial Intelligence, Neural Network, Gaussian Process
Regression, System Simulation, Voltage Control.
Abstract:
Voltage and current measurement data based deep learning as a method to conduct sensorless coil temperature
prediction of an embedded linear induction actuator is being proposed and validated in this work. Generated
numerical data from Finite Element field simulations are used to train a neural network which in turn predicts
temperatures at non-accessible places e.g. at an embedded coil. The network is demonstrated and the compar-
ison to experimental data shows the potential of virtual sensing. Even though the number of physical sensors
have increased enormously in the last decades, the measurement of desired temperatures at certain locations is
limited by accessibility and by the application itself, for example, if a coil is used as a moving part in an actu-
ator. This work proposes an indirect method based on measurable quantities in the device, such as voltage and
current, to quantify precisely temperatures and hot spots in sensitive parts of the device. As high temperatures
can have a huge effect on the device’s performance, a controllable voltage to compensate the performance re-
duction instantaneously is desired. Applications based on the principle of an inductive linear actuator show a
strong performance dependency on the temperature of the conducting material or coil. The authors present an
Artificially Intelligent voltage controller to achieve the desired performance based on measurable variables in
the device and supported by sensorless methods like temperature prediction with Artificial Intelligence (AI).
1 INTRODUCTION
Induction actuators cover a wide range of applica-
tions such as arc suppression, high-speed mechanical
switches and hybrid DC circuit breakers where very
fast operating cycles are required (Vilchis-Rodriguez
et al., 2019). Different concepts exist using the ad-
vantages of coils and repulsion disks. The character-
istics of such processes are a very short energizing
time and fast movements within milliseconds. In DC
circuit breakers, current pulses are created by the dis-
charge of a capacitor. With the generation of eddy
currents, a repulsive force drives a rod up and down
to ensure the stability of power grids, in case of volt-
age drops or power failures (Dong et al., 2011). The
induction actuator is a standard concept for switches
such as circuit breakers. By using a circuit breaker,
the load can be disconnected. This leads to the occur-
rence of electric arcs. The inductive linear actuator’s
a
https://orcid.org/0000-0003-3574-9241
b
https://orcid.org/0000-0001-8644-7281
c
https://orcid.org/0000-0002-1209-7570
principle is attractive as it allows simple designs and
high speed actuation while providing reliability and
stability (Lim et al., 2013).
An induction actuator based application with iter-
ative cycles is investigated for a wide range of appli-
cations and thermal conditions. The repetitive peri-
ods during operation can lead to overheating of the
system. Due to the excited coils and induced eddy
currents, the temperature rise in the coils is huge
and therefore affects the resistance of the coils. The
temperature levels in a fast repetitive mode typically
require active cooling. For further heat reduction,
a voltage controller is needed to define the voltage
charging level of the capacitor during every cycle.
The measurement of the temperature in an embedded
coil is very difficult due to limited space and would
lead to fast failure of the sensor due to high temper-
atures and forces. Instead of the temperature other
properties such as current and voltage can be mea-
sured and based on these data, the demperature can be
determined. There are many applications that use AI
for integrating virtual sensors to determine complex
830
Taenzer, L., Abu-Antoun, C. and Smajic, J.
Sensorless Coil Temperature Measurements using Neural Networks for Voltage Control.
DOI: 10.5220/0010251708300836
In Proceedings of the 13th International Conference on Agents and Artificial Intelligence (ICAART 2021) - Volume 2, pages 830-836
ISBN: 978-989-758-484-8
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Figure 1: Linear induction actuator.
variables using already existing sensor data. Some
authors (Gonzaga et al., 2009) use a feed-forward ar-
tificial neural network for the design of a soft sensor
to estimate the PET viscosity in real time and then
control the polymerization process. Neural networks
as well as Kalman filters are suitable methods to de-
termine the temperature for highly non-linear systems
such as batteries (Charkhgard and Farrokhi, 2010).
2 LINEAR INDUCTION
ACTUATOR
In Fig. 1, the design of the induction actuator is shown
in detail. The system consists of a coil surrounded
by a stator which guides the magnetic field closely
through the coil. The conductive ring is placed in-
side the coil guided by a shaft. When the switch is
turned on, the loaded capacitor is discharged through
the coil. The current in the coil causes a time vary-
ing magnetic field and induces eddy currents in the
conductive ring in the opposite direction to the coil
current. Due to the magnetic field and the current
in the coil and conductive ring, a repulsion force is
generated between the two conductors and the ring
moves away. The capacitor is charged with an en-
ergy E
max
and generates a current pulse that reaches
a maximum value I
max
. The main target of this sys-
tem is always a constant desired kinetic energy of the
conductive ring, regardless of the frequency of repet-
itive loadings. Under operating conditions with sev-
eral cycles per minute, the accompanying heat gen-
eration leads to a significant temperature rise, which
results in a limited performance as the temperature di-
rectly influences the coil resistance. The time interval
in Fig. 2 consists of two different segments. On the
one hand, the stroke period P
s
, on the other hand the
waiting period P
wait
in which the system expects new
input. For the control of cooling and the capacitor’s
input charging voltage, the measurement of the tem-
perature is required and a relationship between this
temperature and the kinetic energy must to be known.
The full system was previously optimized to achieve
the desired performance even at the end of its life-
time, e.g. the conductive ring will still have sufficient
kinetic energy. Consequently, the capacitor is over-
sized. However, this oversizing leads to excessive
kinetic energy, high forces and wear, which in turn
cause the coil to break earlier. Additionally, too much
kinetic energy would overload the system and lead to
faster failure and shorter life time.
Figure 2: Repetitive cycles during operation.
Temperature sensors are widely used due to their low
price, but reach their limits with limited installation
space and offline calibration. In addition, other prob-
lems such as own heat development, contamination
by ions or damage during the process become appar-
ent (Charkhgard and Farrokhi, 2010). In the case of
the investigated induction actuator, a sensor for tem-
perature measurements would have a big impact on
the physical behaviour and performance of the system
as the fill factor of the coil is important to stay high
and the initial position between the coil and conduc-
tive ring has to be precise at the beginning of a cycle.
Further, high accelerations and forces would destroy
the sensor quickly.
Sensorless Coil Temperature Measurements using Neural Networks for Voltage Control
831

Figure 3: The neural network precisely represents the FEM curves.
Virtual sensors have evident advantages over real
physical sensors in terms of cost and implementa-
tion. In addition, certain installation places can also
lead to rapid sensor failure. Regarding virtual tem-
perature measurements, (Guzm et al., 2018) use a
CFD model and a model based on transfer functions
to predict the real time temperature of a greenhouse
from real sensor data. (Boulandet, 2016) introduces a
lumped-parameter model of an electric circuit to pre-
dict the front-side acoustic radiation impedance of a
loudspeaker using the measured electric impedance of
the loudspeaker and additional parameters defined by
experimental data using curve fitting. As alternative
to transfer functions, simplified models and regres-
sion methods as well as neural networks get more and
more attention as precise, fast and reliable methods.
(Hussein, 2018) shows a sensorless way to estimate
the surface temperature and the battery cell’s termi-
nal voltage using ANNs with current measurements
as input.
3 MODELLING
3.1 Finite Element Method (FEM)
Due to the complexity of the electromechanical sys-
tem involving eddy currents and changing inductance
caused by a flying ring, the induction actuator is sim-
ulated with FEM. This numerical method offers a pre-
cise model and captures all relevant effects that can-
not be implemented and modelled so far with meth-
ods such as system identification. By varying rele-
vant system parameters, e.g. lifetime dependencies of
the capacitor, thermal influences such as the coil re-
sistance, the conductive ring resistance and voltage of
the capacitor, many different data points with differ-
ent voltage and current curves of a predefined geomet-
ric concept are simulated. Subsequently, the voltage
can be used to regulate the kinetic energy of the fly-
ing conductive ring to achieve the target performance.
The key parameters are:
• Capacitance of capacitor C
cap
• Resistance of the capacitor R
cap
• Voltage of the capacitor V
cap
• Resistance of the coil R
coil
• Resistance of the conductive ring R
cu
.
Using these input parameters, the corresponding tran-
sient currents, voltages in the coil and the forces act-
ing on the conductive ring are calculated by using
FEM. The idea of this sensorless measurements is
based on the following equations from a coil’s elec-
tric circuit, modelled by an inductance and a resistor,
using Faraday’s law (Galili et al., 2012).
u = iR +
dΦ
dt
= iR +
d
R
A
B(t)dA
dt
(1)
In the coil, the inductance is changing with the po-
sition x of the conductive ring and the current of the
coil. The inductance is a highly complex term that
cannot be calculated in advance. As the magnetic field
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
832

is a result of the changing current and the position in-
fluences the changing area A directly, the flux linkage
is defined as λ(...).
u
coil
= i
coil
R
coil
+
dλ(i
coil
, x)
dt
(2)
u
coil
= i
coil
R
coil
+
δλ(i
coil
, x)
δi
coil
di
coil
dt
+
δλ(i
coil
, x)
δx
dx
dt
(3)
R
coil
=
u
coil
+
δλ(i
coil
,x)
δi
coil
di
coil
dt
+
δλ(i
coil
,x)
δx
dx
dt
i
coil
(4)
The voltage and the current of the coil depend on the
constant resistances and varying inductances. Calcu-
lating the resistance from the varying parameters is
complex and leads to numerical instabilities such as
divisions by zero. However, these equations are sim-
plified engineering equations which are included in a
weak form in the finite element solver model. Using
variables such as position, voltage and current, neural
networks are applied as a regression model that pre-
dicts any output for any combination of inputs in a
very fast way.
After predicting the resistance, the temperature
can be defined by R
coil
∼ ρ
coil
:
R
coil
=
ρ
coil
∗ l
A
(5)
ρ
coil
= ρ
0
(1 + α ∗ (T − T
0
)) (6)
T =
1
α
(
ρ
coil
ρ
0
− 1) + T
0
(7)
3.2 Neural Network Integration
Due to the fact, that neural networks are able to
learn highly complex dependencies, they are ideal to
solve non-linear relationships between input and out-
put variables. Its properties make it relatively easy to
solve the complicated induction equation. As men-
tioned in (Kumar et al., 2020), physical data can be
used in both predictive directions, using a forward
and an inverse model. Due to the physical equations
shown above, the dataset generated by FEM includes
the scalar values (input) and the time dependent volt-
age and current curves (output).
3.2.1 Forward Model
The forward direction can be used to investigate the
system dynamics from the five scalar inputs described
in 3.1 and integrate the outputs such as current and
Figure 4: Varying coil resistance influences the voltage
curves.
Figure 5: Varying coil resistance influences the current
curves.
voltage curve in a system simulation procedure. This
forward model is realized by a feed-forward neural
network, which is trained on the FEM-data of 600
data points created with Latin-Hypercube sampling to
cover a homogenous range of variables. As the FEM
model is being developed over several years and has
an error of less than three percent to experimental re-
sults, it can be used for validation as seen in Fig. 3.
The required accuracy is obtained with three layers
of 2’000 neurons each. The use of dropout and three
folds of cross-validation reduces the risk of overfit-
ting. A trained neural network, using the scalar inputs
mentioned above, is able to capture the effect of resis-
tance in the coil as seen in Fig. 4 and Fig. 5. The coil
and current pulses are scaled over the stroke period P
s
.
The heat generation in the coil results in higher resis-
tances and therefore has a significant impact on the
current pulse. This forward model can be used later
in a system simulation for predicting various operat-
ing cycles within a few milliseconds instead of vari-
ous hours for one cycle using FEM simulations.
Sensorless Coil Temperature Measurements using Neural Networks for Voltage Control
833

Figure 6: Predicted and true data responses of ρ
coil
comparing GPR, Trees (Boosting and Bagging) and ANN.
3.2.2 Inverse Model
For the prediction of the temperature, an inverse
model is necessary. Current and voltage curves serve
as input to predict the coil resistance. By using all
these data points, a neural network is trained to find
the coil resistance’s influence on the current and volt-
age curve.
The neural network is constructed with several
hidden layers using Rectified Linear Units (ReLU) as
the activation function. The convergence algorithm
Adam, a stochastic gradient descent algorithm avail-
able in the Python library Tensorflow, turned out to
be the most suitable. A wide range of different neu-
ral network configurations was trained and analysed,
taking into account parameters as the number of hid-
den layers, the number of neurons, dropout, and batch
normalization. Fig. 6 shows the comparison of using
different Machine Learning methods for the predic-
tion of the coil’s resistivity ρ
coil
. GPR and ANN both
achieve high accuracy results on noisy input data. The
comparison was done using five cross folds and doing
hyperparameter optimization for each model. Addi-
tionally, white noise was added on normalized input
data to get the problem robust also for experimental
and predicted data. By applying white noise with a
maximum amplitude of 3% on the input data, each
model was optimized by training the hyperparame-
ters, e.g. the learners and number of leafs for decision
trees, standard deviation and kind of kernel for GPR
and hidden layers and number of neurons for neural
networks. Three percent noise on normalized data is
used so that this model can be also applied to experi-
mental data.
Figure 7: Potential applications of a virtual sensor are a sys-
tem simulation models using data predicted by ANN and a
real integration on a microcontroller using sensor data.
4 USE CASES
Our proposed virtual sensor can be either applied to
a real induction actuator application and monitor the
temperature of the coil using real sensor measure-
ments or it can be integrated into a system simulation
as seen in Fig. 7.
Figure 8: System simulation model with integrated voltage
control.
In this work, the AI-based system simulation of
this process is realized as shown in Fig. 8. The
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
834

temperature behaviour is represented by a thermal
lumped parameter model predicting the input energy
with Gaussian Process Regression (GPR) during one
operation cycle and then solving the ordinary differ-
ential equation for each cycle. The electromagnetic
coupling is described by the neural network based
forward model. For performance regulation voltage
control is introduced. The purpose of the system
simulation is to investigate the system’s performance
under different operating conditions.
Figure 9: Physical models represented by machine learning
techniques.
As seen in Fig. 9, a system simulation procedure
is created by implementing time series neural net-
work as fast and accurate representation of the time-
consuming finite element calculations. Long Short
Term Memory (LSTM) networks are used in a cou-
pled way to predict the forces of the conductive ring
to calculate the kinetic energy.
5 VALIDATION
Figure 10: Validation of the thermal model using the tem-
perature of the ferromagnetic base.
In a system simulation procedure, the performance
control can be tested. As seen in Fig. 10, the sys-
tem simulation is validated with experiments by exe-
cuting more than 200 operation cycles in a laboratory
and comparing them to the simulation results. As the
temperature in the coil cannot be measured, it is com-
pared to the measurements of the ferromagnetic base.
Although the system simulation assumes a homoge-
nous temperature of the ferromagnetic base, it clearly
captures the trend. The temperature of the ferromag-
netic base is measured radially outside the base. The
performance of the virtual sensor can be compared
with the validated system simulation, Fig. 11. It is
shown that after every operation cycle the initial tem-
perature can be predicted based on the voltage and
current of the coil.
Figure 11: Comparing the coil temperature of the thermal
model in the system simulation with the virtual sensor.
6 VOLTAGE CONTROL
By predicting the force of the conductive ring, its ve-
locity can be derived and the kinetic energy is cal-
culated. For a desired kinetic energy at an optimal
performance point, the input voltage of the capacitor
can be regulated with a controller in a system sim-
ulation model. Due to the knowledge of decreasing
lifetime parameters of the capacitor and the tempera-
ture measurements, the expected performance of the
system is predicted and a controller can adapt the in-
put energy. Based on the FEM data, artificial intelli-
gence is used once more in form of GPR to predict the
corresponding input voltage of the capacitor for the
above defined input parameters. For this voltage con-
trol, a real time thermal model is necessary to monitor
the transient behaviour of the coil temperature over
time and use it as new input for the machine learn-
ing model. After every operational cycle, the voltage
control gets the lifetime and thermal input parameters
and predicts the needed voltage for a desired input
energy. In Fig. 12, the influence of voltage control
is shown. For the investigated device with an oper-
ational time interval of two seconds, the heat gener-
Sensorless Coil Temperature Measurements using Neural Networks for Voltage Control
835
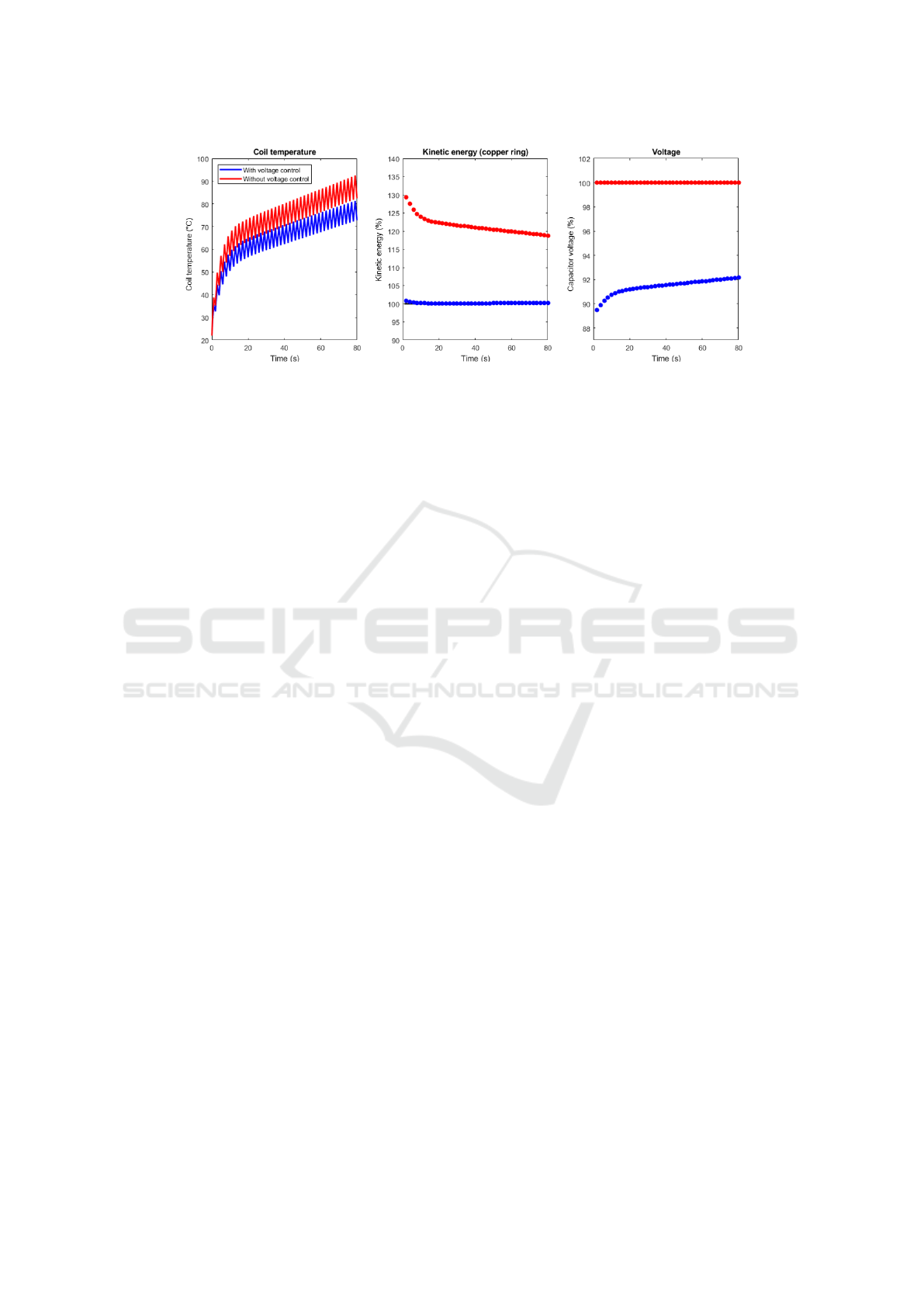
Figure 12: During 40 operation cycles, voltage control has a significant influence on the heat generation in the system. It leads
to a continuous character of the kinetic energy and requires less energy in the capacitor.
ation in the system leads to increasing coil tempera-
tures, although the system is already cooled. By using
a constant input voltage of 100% to make the system
reaching 100% kinetic energy of the conductive ring
even at the end of the lifetime, a lot of energy is un-
necessarily invested leading to longer charging times
in the capacitor. If voltage control is included, less
voltage is needed and the system can adapt to tem-
perature changes and decreasing capacitance due to
abrasion of the capacitor. The optimal performance
at 100% kinetic energy is achieved with errors of less
than 2% and, therefore, makes the whole system more
efficient and achieves reliably the desired optimal per-
formance point.
7 CONCLUSIONS
A virtual sensor is proposed for the temperature deter-
mination in the coil of an induction actuator to con-
trol its performance. Beside the introduced system
simulation model, the sensor can be used for predict-
ing the temperature of a coil when physical hardware
sensor measurements of the coil current and volt-
age are available. A validated and highly accurate
FEM model is used to generate training data for an
AI-based virtual sensor. The electromagnetic FEM
model takes hours to calculate the system response of
one single operation cycle. In contrast, a trained ML
model predicts the temperature of the coil within mil-
liseconds in places where no sensor can be integrated
without reducing the performance. When consider-
ing thousands of working cycles, excessive comput-
ing equipment would be needed to describe the tem-
perature accurately and efficiently with FEM models.
The virtual sensor therefore not only allows measure-
ments in places that are difficult to reach, but also en-
ables a fast and very accurate calculation method.
REFERENCES
Boulandet, R. (2016). Sensorless Measurement of the
Acoustic Impedance of a Loudspeaker. (1):7353–
7360.
Charkhgard, M. and Farrokhi, M. (2010). State-of-charge
estimation for lithium-ion batteries using neural net-
works and EKF. IEEE Transactions on Industrial
Electronics, 57(12):4178–4187.
Dong, E., Tian, P., Wang, Y., and Liu, W. (2011). The de-
sign and experimental analysis of high-speed switch
in 1.14kV level based on novel repulsion actuator.
2011 4th International Conference on Electric Utility
Deregulation and Restructuring and Power Technolo-
gies (DRPT), (50807006):767–770.
Galili, I., Kaplan, D., and Lehavi, Y. (2012). physics course.
337.
Gonzaga, J. C. B., Meleiro, L. A. C., Kiang, C., and Filho,
R. M. (2009). ANN-based soft-sensor for real-time
process monitoring and control of an industrial poly-
merization process. 33:43–49.
Guzm, C. H., Carrera, J. L., Dur, A., Berumen, J., Ortiz,
A. A., Guirette, O. A., Brizuela, J. A., and Fabio, G.
(2018). Implementation of Virtual Sensors for Mon-
itoring Temperature in Greenhouses Using CFD and
Control.
Hussein, A. A. (2018). A Sensorless Surface Tempera-
ture Measurement Method for Batteries using Artifi-
cial Neural Networks. pages 3560–3564.
Kumar, S., Tan, S., Zheng, L., and Kochmann, D. M.
(2020). Inverse-designed spinodoid metamaterials.
npj Computational Materials, 6(1):1–10.
Lim, D.-k., Woo, D.-k., Kim, I.-w., Shin, D.-k., Ro, J.-s.,
Chung, T.-k., and Jung, H.-k. (2013). Characteris-
tic Analysis and Design of a Thomson Coil Actuator
Using an Analytic Method and a Numerical Method.
49(12):5749–5755.
Vilchis-Rodriguez, D. S., Shuttleworth, R., Smith, A. C.,
and Barnes, M. (2019). Performance of high-power
thomson coil actuator excited by a current pulse train.
2019:3937–3941.
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
836
