
Multi-Agent Goal Reasoning with the CLIPS Executive in the
RoboCup Logistics League
Till Hofmann
a
, Tarik Viehmann
b
, Mostafa Gomaa
c
, Daniel Habering
d
, Tim Niemueller
∗ e
and Gerhard Lakemeyer
f
Knowledge-based Systems Group, RWTH Aachen University, Germany
Keywords:
Goal Reasoning, Multi-Agent Coordination, Execution Monitoring, Smart Factory, RoboCup Logistics
League.
Abstract:
Production processes in smart factories moved away from a process-centered paradigm into a modular pro-
duction paradigm, facing the variations in demanded product configurations and deadlines with a flexible
production. The RoboCup Logistics League (RCLL) is a robotics competition in the context of in-factory
logistics, in which a team of three autonomous mobile robots manufacture dynamically ordered products. The
main challenges include task reasoning, multi-agent coordination, and robust execution in a dynamic envi-
ronment. We present a multi-agent goal reasoning approach where agents continuously reason about which
objectives to pursue rather than only planning for a fixed objective. We describe an incremental, distributed
formulation of the RCLL problem implemented in the goal reasoning system CLIPS Executive. We elaborate
what kind of goals we use in the RCLL, how we use goal trees to define an effective production strategy and
how agents coordinate effectively by means of primitive lock actions as well as goal-level resource allocation.
The system utilizes a PDDL model to describe domain predicates and actions, as well as to determine the
executability and effects of actions during execution. Our agent is able to react to unexpected events, such as
a broken machine or a failed action, by monitoring the execution of the plan, re-evaluating goals, and taking
over goals which were previously pursued by another robot. We present a detailed evaluation of the system
used on real robots.
1 INTRODUCTION
Planning and reasoning in robotics remains a chal-
lenging task. A robot acts in a dynamic environment,
where the world continuously changes while the agent
decides what to do. While long planning times are
acceptable in many domains, robots are required to
make decisions quickly. Furthermore, robots acts in a
physical world, where actions often have unintended
effects or fail completely.
The RoboCup Logistics League
(RCLL) (Niemueller et al., 2015) is a robotics
competition that show-cases those challenges. In the
RCLL, a team of three mobile robots has to run a
a
https://orcid.org/0000-0002-8621-5939
b
https://orcid.org/0000-0003-0264-0055
c
https://orcid.org/0000-0002-2185-6065
d
https://orcid.org/0000-0002-4917-3055
e
https://orcid.org/0000-0001-6827-8648
f
https://orcid.org/0000-0002-7363-7593
∗
T. Niemueller is now with X – The Moonshot Factory.
smart factory to manufacture dynamically ordered
products. They do so by operating a set of Modular
Production System (MPS) at fixed locations. Each
MPS can perform a particular step of the production.
Challenges include determining the production steps
necessary to fulfill an order, coordinating the three
robots for effective cooperation, and reacting to
unexpected events and failed actions, such as a
broken machine or a failed grasping action.
In this paper, we present a multi-agent goal rea-
soning approach to tackle the RCLL
1
. Goal rea-
soning is “the study of agents that can deliberate
on and self-select their objectives” (Aha, 2018), in-
stead of just pursuing a fixed objective. We describe
an agent implementation that uses the CLIPS Exec-
utive (CX) (Niemueller et al., 2019), an integrated
goal reasoning system with an explicit goal represen-
tation. The CX implements a goal lifecycle (Roberts
et al., 2014) which specifies how the mode of a goal
1
The code is open source and is available at https:
//www.fawkesrobotics.org/projects/rcll2019-release/.
80
Hofmann, T., Viehmann, T., Gomaa, M., Habering, D., Niemueller, T. and Lakemeyer, G.
Multi-Agent Goal Reasoning with the CLIPS Executive in the RoboCup Logistics League.
DOI: 10.5220/0010252600800091
In Proceedings of the 13th International Conference on Agents and Artificial Intelligence (ICAART 2021) - Volume 1, pages 80-91
ISBN: 978-989-758-484-8
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
progresses over time. Instead of pursuing long-term
goals, our distributed agent incrementally decides
what to do, using fine-grained goals, structured in a
goal tree which defines an overall strategy. To make
sure that no two conflicting goals are pursued simul-
taneously, the agents coordinate by means of a shared
world model, locking actions, and goal-level resource
allocation. PDDL is used for plan representation and
as a model for execution monitoring.
Using goal trees of fine-grained goals, a dis-
tributed coordination strategy, and a PDDL model
for action execution results in a robust system that
is able to cope with frequent action failures, unex-
pected events, and even temporary outage or perma-
nent drop-out of a robot, as demonstrated by an ex-
tensive evaluation.
In the following, we start by describing the RCLL
and its challenges for a reasoning system in Section 2.
In Section 3 we summarize related work in goal rea-
soning then describe other approaches to the RCLL.
In Section 4, we explain how we applied goal reason-
ing in the RCLL. We demonstrate how the produc-
tion process in the RCLL can be described in terms
of goals, and how those goals can be organized in a
goal tree to define an overall strategy. In Section 5,
we detail the coordination primitives of the CX and
how we use them in the RCLL domain to allow ef-
fective multi-agent cooperation. In Section 6, we de-
scribe how we monitor plan execution and react to
failed actions or unexpected events. Finally, we pro-
vide a detailed evaluation of our system on real robots
in Section 7, before concluding in Section 8.
2 THE RoboCup LOGISTICS
LEAGUE
RoboCup (Kitano et al., 1997) is an international
robotics competition with the goal to foster AI and in-
telligent robotics research and is mostly known for its
soccer competitions, although it also provides compe-
titions for domestic service robots and rescue robots.
The RoboCup Logistics League (RCLL) (Niemueller
et al., 2015) is an in-factory production logistics com-
petition under the RoboCup umbrella. Two teams
consisting of three robots each compete against each
other on a playing field of size 14 m × 8 m for 17 min-
utes. The main goal is to manufacture products to
fulfill orders, where an order describes the configura-
tion of the requested product, the delivery time win-
dow and the requested quantity. Orders are generated
by a semi-autonomous game controller, the referee
box (refbox) (Niemueller et al., 2016b), which also
takes care of generating the field layout, workpiece
tracking, and score keeping. Products consist of (a) a
base piece with color black, silver, or red; (b) zero to
three rings with colors orange, yellow, blue, or green;
(c) and a cap, either gray or black; resulting in 243
possible product configurations. The number of rings
determines the product complexity, where a C0 is a
product with no ring and minimal complexity, and C3
is a product with three rings and maximal complexity.
Each team has its exclusive set of Modular Pro-
duction System (MPS) machines that perform the
manufacturing steps, teams do not have to com-
pete for machine usage. However, the machines are
pseudo-randomly spread across the field such that the
robots cross paths frequently. There are several differ-
ent types of machines: A base station (BS) dispenses
bases, a ring station (RS) mounts rings, a cap sta-
tion (CS) can buffer and mount caps, and a delivery
station (DS) is used to deliver the manufactured prod-
ucts.
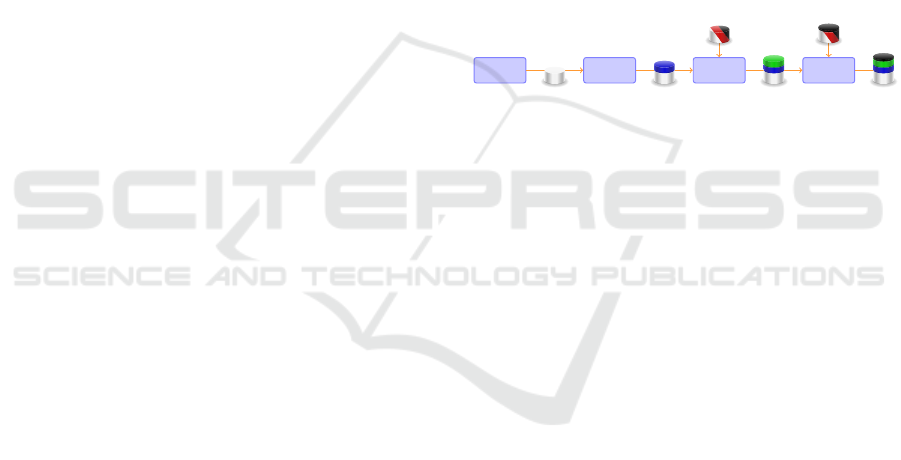
BS RS 1 RS 2 CS 1
Figure 1: The production chain for a C2 (Coelen et al.,
2019).
Figure 1 shows an exemplary production of a C2.
First, robot 1 fetches a silver base piece from the BS,
carries it to RS 1 and puts it on the machine’s con-
veyor belt. Then, it instructs the RS to mount a blue
ring on the workpiece. At the same time, robot 2
fetches an additional workpiece, either from a CS or
the BS, and feeds it into the RS 2 as raw material for
the next ring. Robot 1 then carries the workpiece with
the silver base and the blue ring to RS 2 and feeds
it into the machine, before it instructs the machine
to mount the second, green ring. In the meantime,
robot 3 prepares the CS by feeding a cap carrier from
the shelf into the machine, which then removes the
cap from the cap carrier for later usage. Robot 3 then
fetches the cap-less base from the output of the CS
and discards it. After this is done, one of the robots
fetches the workpiece with the two rings, feeds it into
the CS and instructs the machine to mount the cap.
Finally, a robot carries the finished product to the DS
and instructs it to complete the delivery. This exam-
ple shows that producing a single C2 requires about
11 steps like mounting a ring. Each step involves sev-
eral actions, e.g, moving to a machine, putting down
the workpiece, and instructing the machine.
As there are nine orders in a regular game, it is not
possible to fulfill all orders. This over-subscription is
one of the major challenges of the competition as the
robots have to carefully decide which orders to pur-
sue. Also, the domain contains a number of sources
Multi-Agent Goal Reasoning with the CLIPS Executive in the RoboCup Logistics League
81

of uncertainty: For one, the orders are unknown be-
forehand and machines may turn off during the game
for unscheduled maintenance and behave unexpect-
edly due to handling errors, e.g., a workpiece get-
ting stuck in the machine. Also, action failures are
common, as machine handling in particular is a chal-
lenging task. As the production of a single product
already takes significant time, some of the required
steps can be parallelized and multiple orders can be
pursued concurrently, multi-agent coordination is cru-
cial to fulfill orders effectively.
3 RELATED WORK
We summarize related work on goal reasoning and de-
scribe a number of different reasoning approaches for
the RCLL.
3.1 Goal Reasoning
Goal reasoning is “the study of agents that can delib-
erate on and self-select their objectives” (Aha, 2018).
A goal-reasoning agent not only reasons about its ac-
tions to accomplish a fixed goal, but also reasons
about which goals to pursue. Goal refinement rep-
resents the context in which a goal is pursued by a
goal-reasoning agent. The goal lifecycle (Roberts
et al., 2014) is such a goal refinement and speci-
fies how the mode of a goal progresses over time.
Its semantics are defined in terms of goal-task net-
work (GTN) planning (Alford et al., 2016), which
combines hierarchical task networks (HTNs) with
hierarchical goal networks (HGNs) (Shivashankar
et al., 2012). The goal lifecycle has been imple-
mented in ActorSim (Roberts et al., 2016a,b), a gen-
eral platform for research on autonomy in simu-
lated environments. It provides a goal refinement
library with goal management and implementations
for goals, goal types, and goal refinement strategies.
Goal reasoning has been applied in various domains,
e.g., Minecraft (Abel et al., 2015), underwater vehi-
cles (Wilson et al., 2018), and most closely related
to our application, to coordinate a team of robots for
disaster relief (Roberts et al., 2015).
3.2 Reasoning in the RCLL
We present other approaches that were successfully
used in the Planning and Execution Competition for
Logistics Robots In Simulation (PExC) (Niemueller
et al., 2016a) or in the RCLL. The PExC has the same
rules as the RCLL but only runs in simulation. Thus,
in contrast to our approach, those approaches were not
used on real robots.
3.2.1 ASP
Sch
¨
apers et al. (2018) encoded the RCLL in answer
set programming (ASP) to implement a centralized,
global planner. Their system plans continuously
while the game is running. They use a coarse repre-
sentation in terms of compound tasks, rather than ac-
tions. They compute a temporal plan with discretized
time intervals of 10 s and a planning horizon of 180 s.
By using the multi-shot solver clingo (Gebser et al.,
2019), their system can re-plan without regrounding
the whole program. They have successfully used their
system in the PExC 2018.
3.2.2 OpenPRS
The Procedural Reasoning System (PRS) is a high-
level control and supervision framework to represent
and execute plans and procedures in a dynamic en-
vironment (Ingrand et al., 1996). It is based on the
belief-desire-intention (BDI) model (Bratman, 1987).
The RoboCup team Carologistics developed
a centralized reasoning approach extending on
(Niemueller et al., 2017b). All tasks required to pro-
duce a chosen order are intended in parallel, as roots
of the intention graph, and sleep until their precondi-
tions are satisfied. Consequently, each intention mon-
itors the execution of a sequence of location transition
goals performed by an allocated actor to a workpiece.
Their approach scored the second position in PExC
2017.
The RoboCup team GRIPS uses a combination
of HTNs and OpenPRS for a centralized reasoning
agent in the RCLL (Ulz et al., 2019). A central global
HTN planner decomposes each order into a set of
tasks, which are then dispatched incrementally to the
robots using a request-response mechanism. The cen-
tral planner uses a coarse task representation, which
is then refined locally on the robot with OpenPRS.
GRIPS was able to win the RCLL World Cup 2018
with their approach.
3.2.3 OMT-based planning
Optimization modulo theories (OMT) extends
satisfiability modulo theories (SMT) solving with
optimization functionalities. Leofante et al. (2019)
model the RCLL as state-based planning problem by
representing the domain with mixed-integer arith-
metic formulas with an initial state and a transition
relation. The transition relation is determined by the
agent’s actions and defines possible execution paths,
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
82
where each transition has an associated reward. They
then optimize the execution path to maximize the
reward. Their approach won the PExC 2018.
3.2.4 ROSPlan
ROSPlan (Cashmore et al., 2015) is a framework for
task planning in the Robot Operating System (ROS).
It provides ROS nodes for the knowledge base, which
is responsible for knowledge gathering and generat-
ing the initial situation for the planner, and the plan-
ning system, which takes care of invoking the plan-
ner, as well validating and dispatching the resulting
plan. ROSPlan has been used in the PExC in con-
junction with the partial-order planner POPF (Coles
et al., 2010).
3.2.5 Auction-based planning
Hertle and Nebel (2018) describe a distributed ap-
proach using an auction mechanism with temporal
planning based on ROSPlan. Based on a task-level
domain description, a central auctioneer determines
the tasks that needs to be done and offers them to the
three robot agents. Each agent computes a temporal
plan for the open tasks and bids on a task with the start
and end time of the plan. Based on the bids, the auc-
tioneer determines which robot should perform which
task and distributes them to the robots. This auction-
based approach won the PExC 2017.
3.2.6 CLIPS Agent
Niemueller et al. (2013) implemented an agent for the
RCLL in the rule-based production system CLIPS.
In contrast to the CX, it does not provide an explicit
task specification language or an explicit goal repre-
sentation, but instead directly uses the rule-based sys-
tem to decide which action to execute next, whenever
the robot is idle. The system has been used success-
fully in the RCLL (Niemueller et al., 2017a; Hofmann
et al., 2018).
4 GOAL REASONING IN THE
RCLL
In goal reasoning, an agent reasons about which ob-
jectives to pursue rather than only planning for a fixed
objective. The CLIPS Executive (CX) (Niemueller
et al., 2019) is an integrated goal reasoning system
that provides an explicit goal representation, imple-
ments a goal lifecycle, and structures goals in trees.
In the following, we describe the core functionalities
FORMULATED
SELECTED
EXPANDED
COMMITTED
DISPATCHED
FINISHED
EVALUATED
RETRACTED
Goal Reasoner
Choose among goals
Expander generates plan
Commit to a plan or sub-goal
Acquire goal resources
Action selection and execution
Evaluation of goal outcome
CX/System
Rejection
Re-initiate monitoring (maintenance goal only)
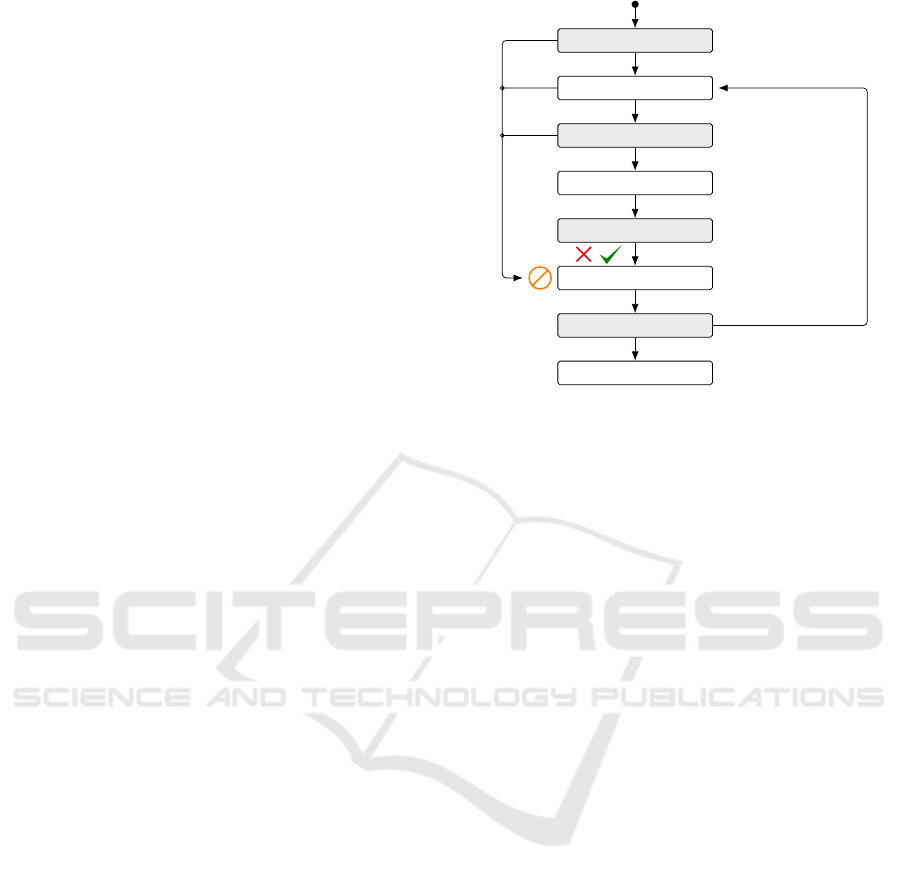
Figure 2: The goal lifecycle of the CLIPS Execu-
tive (Niemueller et al., 2019).
of the CX and how we applied goal reasoning to the
RCLL. We start by presenting the goal lifecycle and
the simple goals that we use in the RCLL. We con-
tinue with goal trees and how we use them to define a
production strategy in the RCLL. Finally, we explain
how we use a plan library to expand a goal into a plan.
4.1 Goals and the Goal Lifecycle
A goal is an explicit representation of an objective
and relevant aspects necessary to reach it. A goal
can either achieve or maintain a condition or state,
e.g., mount a cap or keep the shelf filled. A goal is
a grounded instance of a certain class describing a
category of goals, e.g., DELIVER. The goal lifecycle,
shown in Figure 2, describes how a goal progresses
over time, where the goal mode describes the current
state of the goal. Initially, the goal reasoner formu-
lates a set of goals, meaning that it may be relevant
for consideration. The goal reasoner then selects one
or more goals, e.g., by picking the most promising
goal. A selected goal is then expanded by generating
(possibly multiple) plans. Next, the reasoner commits
to one plan and acquires necessary goal resources, be-
fore it dispatches the goal by executing the plan.
4.1.1 Goals in the RCLL
We pursue a distributed incremental strategy, where
each agent decides locally which goal to pursue next.
We use fine-grained goals, splitting long-term goals
such as the production of a single product in multiple
smaller goals. This avoids planning for events over a
long duration, often leading to sub-optimal or infeasi-
ble plans, as events such as new orders, failed actions,
Multi-Agent Goal Reasoning with the CLIPS Executive in the RoboCup Logistics League
83
WP1,C-RS1 WP2,C-CS1 WP3,C-CS1
WP1,C-RS1 WP2,C-CS1 WP3,C-CS1
WP1,C-RS1 WP2,C-CS1
WP3,C-CS1
WP1,C-RS1 WP2,C-CS1
WP3,C-CS1
WP1,C-RS1 WP2,C-CS1
WP3,C-CS1
WP1,C-RS1 WP2,C-CS1
WP3,C-CS1
WP1,C-RS1
WP2,C-CS1
WP3,C-CS1
WP1,C-RS1
WP2,C-CS1 WP3,C-CS1
a) b) c) d) e)
Assembly
Assembly
Assembly
MOUNT-
RING
PRODUCE-
C0
MOUNT-
CAP
Assembly
MOUNT-
RING
PRODUCE-
C0
MOUNT-
CAP
Assembly
MOUNT-
RING
PRODUCE-
C0
MOUNT-
CAP
Assembly
MOUNT-
RING
PRODUCE-
C0
MOUNT-
CAP
Assembly
MOUNT-
RING
PRODUCE-
C0
MOUNT-
CAP
Assembly
MOUNT-
RING
PRODUCE-
C0
MOUNT-
CAP
Assembly
MOUNT-
RING
PRODUCE-
C0
MOUNT-
CAP
Assembly
MOUNT-
RING
PRODUCE-
C0
MOUNT-
CAP
Resources:
(rejected, acquired)
Robot 1Robot 2
C-CS1, WP3
C-CS1, WP3
C-CS1, WP3
C-CS1, WP2
C-CS1, WP3
C-RS1, WP1
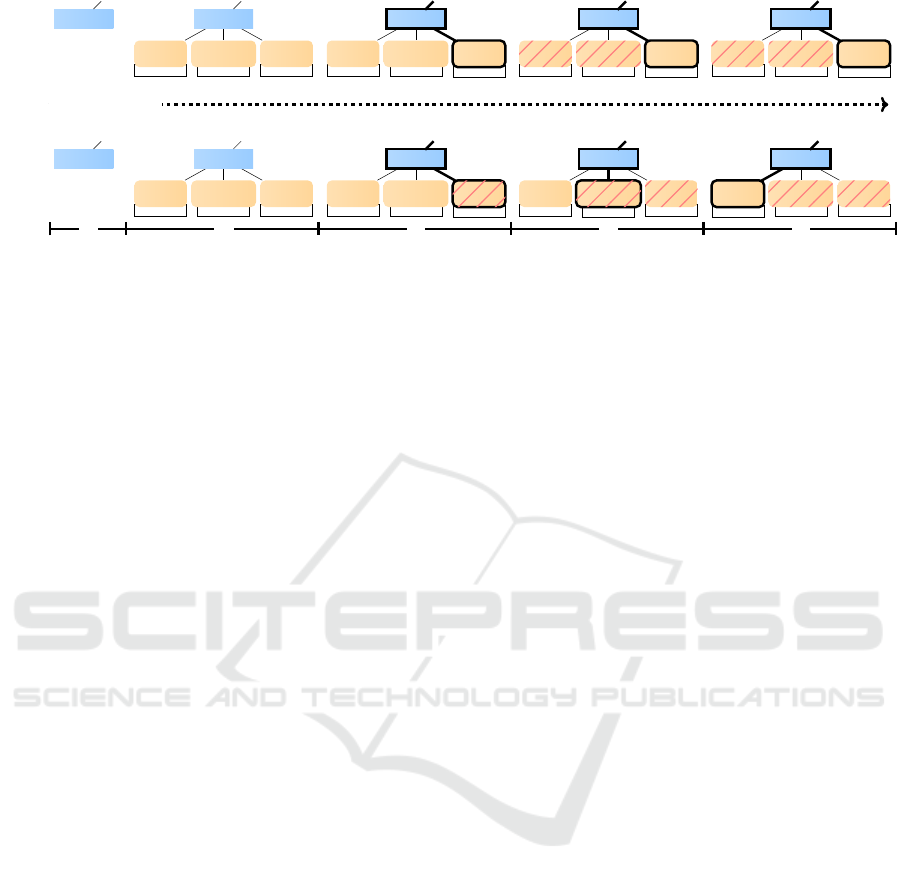
Figure 3: Dispatching a goal from a sub-tree with a run-one compound achieve goal as root and simple goals as leaves: (a) a
compound goal Assembly is formulated; (b) Assembly is expanded by formulating all currently feasible sub-goals of Assembly;
(c) Assembly is dispatched and committed to MOUNT-CAP, Robot 1 dispatches MOUNT-CAP by acquiring the resources, Robot 2
rejects it as its resource request gets denied; (d) Robot 1 is committed to MOUNT-CAP and rejects all other formulated goals;
Assembly of Robot 2 commits to PRODUCE-C0, which is rejected due to resource C-CS1 already being locked; (e) Robot 2
commits to MOUNT-RING and acquires resources C-RS1 and WP1.
and the loss of a robot impair the result.
A goal achieves a production step or maintains a
condition necessary for sustaining the production, by
acting in the physical world or by communicating to
instruct a machine. Simple goals were crafted with
the following considerations:
1. Robots transport workpieces between machines.
When a robot picks up a workpiece, the agent al-
ready knows what the workpiece will be used for
and where it needs to be taken. There are limited
reasonable transportation operations, modeled as
the following simple goals:
Purpose Goal Class Source Dest.
Assembly MOUNT-RING BS
I/O
, RS
O
RS
I
Assembly MOUNT-CAP RS
O
CS
I
Assembly PRODUCE-C0 BS
I/O
CS
I
Preparation FILL-CAP CS
Shelf
CS
I
Preparation FILL-RS BS
I/O
, CS
O
RS
Slide
Preparation CLEAR-MPS Any MPS
O
-
Completion DELIVER CS
O
DS
I
2. A robot can carry a single workpiece at a time.
Thus, it can only pursue a single transportation
goal at a time.
3. A workpiece may only be fed into a machine if
the machine is ready to perform the right manu-
facturing step, e.g., a CS must have a buffered cap
to perform a MOUNT-CAP. A workpiece may not be
picked up from the input of a machine.
4. A machine can perform a manufacturing step,
e.g., mounting a ring, if a workpiece is at its in-
put and no workpiece is at its output. However, a
workpiece may already be placed at the input and
the instruction may be sent later.
In case a workpiece cannot be used for anything any-
more, e.g., a capless carrier when all ring stations are
already filled, it may be necessary to drop it on the
ground to effectively remove it from the game, which
is possible using a DISCARD goal.
Machine instructions are universally handled by
the PROCESS-MPS goal, where a robot instructs an
MPS to start performing a machine operation (e.g.,
assembly or preparation) and then anticipates the out-
come of the operation to update its world model. The
outcome is an exogenous event which can be sensed
by observing the MPS state changes. Decoupling the
machine instruction from transportation goals allows
robots to pursue other transportation goals after plac-
ing the workpiece at the input of a machine. A draw-
back is that all robots could end up getting busy exe-
cuting low priority goals (e.g., FILL-RS), while a ma-
chine had finished an assembly, resulting in a high
priority goal (e.g., DELIVER). This might delay start-
ing the high priority goal (until a robot becomes avail-
able). To remedy this, without forcing robots to phys-
ically wait for the completion of machine operation,
one robot is assigned a special role so it can only per-
form goals crucial for production (i.e., starting an or-
der, continuing an order, preparing an empty CS).
Apart from transportation and machine instruc-
tion goals, we also use goals to model communication
tasks that are not immediately changing the physical
world. The SEND-BEACON goal provides the current
robot status to the refbox, as required by the rules
of the game. EXPIRE-LOCKS provides robustness to
multi-agent coordination by cleaning up all the locks
held by robots that are not part of the game anymore
due to a critical failure. Further, goals can also encap-
sulate necessary changes to the current world model
that are not caused by robot actions. In the RCLL hu-
mans refill the supply of raw material at the base sta-
tions and the cap station shelves. From a robots point
of view a base station essentially has an endless sup-
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
84

ply of bases, hence it can simply spawn a correspond-
ing object in its world model whenever needed using
a SPAWN-WP goal. This effectively allows to model the
RCLL as a finite domain. Similarly shelves from cap
stations are restocked with cap carriers, modeled via
a REFILL-SHELF goal.
4.2 Goal Trees
In the CX, goals may be organized in goal trees to ex-
press some relation among goals. A goal tree recur-
sively consists of compound goals and simple goals,
where a compound goal has one or multiple sub-
goals, and a simple goal is a leaf of a tree. A com-
pound goal is expanded by creating its sub-goals, a
simple goal is expanded by creating one or more plans
that accomplish the goal. For a compound goal, some
transitions are performed automatically by the CX,
e.g., committing to the sub-goal with the highest pri-
ority.
There are five types of compound goals: A run-
all goal runs all its sub-goals; a try-all goal runs all
sub-goals until at least one sub-goal succeeded, fail-
ing sub-goals are ignored unless all sub-goals fail; a
run-one goal runs the first non-rejected sub-goal and
fails if that goal fails; a retry goal retries a sub-goal
for a specified number of times if it fails; a timeout
goal runs a sub-goal and fails if the sub-goal does not
complete in time.
A compound goal has a similar lifecycle as a sim-
ple goal, but with a different semantics. A compound
goal is expanded by formulating sub-goals. If at least
one sub-goal exists, the goal reasoner commits to the
compound goal, otherwise it is rejected. By selecting
a sub-goal, the goal is dispatched.
Figure 3 illustrates the interaction of lifecycles
from different goals in a tree from a perspective of two
different robots with the same world model that both
determine a goal to dispatch. A simple leaf goal is
chosen to be executed by recursively dispatching the
highest priority goal . If a goal cannot be dispatched
because required resources cannot be acquired, as de-
tailed later in Section 5, the next best alternative is
chosen. If all sub-goals are rejected, a compound goal
is rejected as well, enabling backtracking until a leaf
goal in a different branch is found.
4.2.1 Goal Trees in the RCLL
In the RCLL, an agent maintains multiple objectives
simultaneously. All root goals maintain some condi-
tion and create achieve sub-goals if the condition is
not satisfied. Figure 4 shows the six goal trees used
by the RCLL agent. The Maintain Beacon root goal
creates a SEND-BEACON sub-goal once per second to
send a status message to the refbox, realizing a hear-
beat signal. In a similar way the Maintain Lock Expi-
ration root goal periodically triggers the creation of an
EXPIRE-LOCKS goal to continuously react to possible
outages in the multi-agent communication backend.
The Maintain WP Spawning and Maintain Shelf Refill
root goals are populated whenever a workpiece is dis-
pensed at the base station or a shelf is emptied, respec-
tively. Hence they realize the changes in the world in-
troduced by humans that replenish the respective sta-
tions with materials according to the rules. The Main-
tain MPS Handling root goal manages machine in-
structions and creates a PROCESS-MPS sub-goal when-
ever some instruction needs to be sent.
The largest goal tree is the production tree with
the Maintain Production goal as its root. The tree
contains all transportation goals and is responsible for
driving the production forward. As those goals re-
quire the robot to act in the physical world, only one
of the tree’s leaf nodes can be dispatched simultane-
ously. We also added goals for when no progress can
be made. In that case a robot should drive to a wait-
ing position to clear the paths for other robots. The
structure of the tree effectively encodes our strategy.
Goals performing assembly steps, for example, are of
higher priority compared to goals that only prepare
material on the machines. Having a tree structure
instead of a flat-ordered sequence of goals enables
adapting parts of the tree without impacting unrelated
branches. This is particularly helpful to adapt to game
rule changes, as the RCLL is continuously improved
and extended with new challenges.
The inner goals of the Maintain Production tree
are run-one compound goals, i.e., it runs the first
non-rejected sub-goal and the outcome is bound to
whether that sub-goal succeeded or failed. If a se-
lected sub-goal is rejected (e.g., because another robot
had already claimed a required resource), the next
best goal in the same branch is selected. If no leaf
goal in that branch can be executed, the selection goes
recursively up the tree until an executable leaf goal
in a next best branch is reached. The lowest priority
branch No Progress contains goals that are executed
if nothing else can be selected. This guarantees that a
simple goal will be executed in each lifecycle of the
root goal. As an example, the GO-WAIT goal will let
the robot drive to some waiting position to keep the
idle robot from blocking crucial paths of other robots.
Figure 4 shows all goal trees with all goal classes
that can be formulated. While a robot is pursuing no
goal, it continuously updates its shared world model
and reformulates its goals, while only formulating
goals that can actually be pursued. As an example,
a MOUNT-RING goal is only formulated if there is a
Multi-Agent Goal Reasoning with the CLIPS Executive in the RoboCup Logistics League
85

Maintain
MPS Handling
PROCESS-MPS
Maintain
WP Spawning
SPAWN-WP
Maintain
Production
Production Selector
No Progress
WAIT GO-WAIT DISCARD
Prepare Resources
Prepare Rings
FILL-RS
Wait for Process
WAIT-FOR-MPS
Prepare Caps
FILL-CAP
Clear
CLEAR-MPS
Fulfill Orders
Assembly
MOUNT-RING PRODUCE-C0 MOUNT-CAP
Deliver Products
DELIVER
Urgent
RESET-MPS
Maintain
Shelf Refill
REFILL-SHELF
Maintain
Beacon
SEND-BEACON
Maintain
Lock Expiration
EXPIRE-LOCKS
Figure 4: RCLL Goal Trees. The root goals (ellipsis) are maintenance goals, the inner sub-goals (blue rectangular) are run-one
compound achieve goals and the leaves (yellow rounded corners) are simple achieve goals. The arrangement of the sub-goals
conveys the static goal priorities used for goal selection. Priorities increase from left to right.
1 ( go- w a i t ?s t a r t ? s i d e ( w a it-pos ?d s I N PUT ))
2 ( l o c a t i o n - l o c k ? ds IN P U T )
3 ( mo ve ( wait-pos ?d s I NPU T ) ?ds I N P U T )
4 ( lo ck ?d s )
5 ( wp - p u t ? wp ? ds )
6 ( prep a r e - d s ? ds ? o r d e r )
7 ( f u l f i l l - o r d e r ?com p l e x i t y )
8 ( un l o c k ? ds )
9 ( l o c a t i o n - un l o c k ?d s I NPU T )
10 ( go- w a i t ? ds INP U T ( wa i t - p o s ? ds I N P U T ))
Listing 1: The parameterized plan for DELIVER goals.
1 (:action wp - p u t
2 :parameters ( ?w p - w o r k p i e c e ?m - mp s )
3 :precondition (and ( r o b o t - a t ?m I N PUT )
4 ( wp - u s a b l e ? wp ) ( holdi n g ?w p )
5 ( mp s - s id e - f r e e ?m INP U T ) )
6 :effect (and ( wp-a t ? wp ? m IN P U T )
7 (not ( h o l d i n g ? wp ) ) ( ca n - h o l d )
8 (not ( mp s - s i d e -f r e e ? m IN P U T )) ) )
Listing 2: The action wp-put, which puts a workpiece on a
machine, and which is used in the plan in Listing 1.
workpiece that requires an additional ring and the RS
has all required materials.
4.3 Goal Expansion
After presenting the structure of goal trees that select
appropriate simple goals for execution, we now fo-
cus on the goal lifecycle (Figure 2) of each individ-
ual simple goal. After a simple goal is selected, it
is expanded by determining a suitable plan. The CX
supports a PDDL-based planner model (Niemueller
et al., 2018), where domain predicates, object types
and action descriptions are generated from a PDDL
description file. As an example, Listing 2 shows the
definition of the action wp-put, which puts a work-
piece into a machine.
In the RCLL, we do not use a planner, but instead
rely on a plan library based on a PDDL model of the
RCLL. By doing so, we avoid run-time overhead,
as we do not need to wait for the planner to deter-
mine a plan. Also, using a hand-crafted plan library
provides more fine-grained control of the dispatched
plans. While this has the disadvantages that we need
to maintain the plan library, we circumvent those is-
sues by using goals which require only short plans
with a few actions. Also, as goal expansion is done
by the goal reasoner, we can make use of conditional
plans. As an example, the plan shown in Listing 1
is one possible branch of the plan for DELIVER; if the
robot is not yet holding the workpiece to be delivered,
the plan is prepended with a sub-plan that fetches the
workpiece first. With these methods, we obtain plans
without unexpected actions, while keeping the main-
tenance of the plan library feasible, even for such a
complex domain as the RCLL. Nevertheless, we are
considering to (partially) replace the plan library with
a PDDL planner in the future to be able to react to
unforeseen situations.
The CX supports both sequential and temporal
plans. In the RCLL, we only utilize the former. How-
ever, we may dispatch multiple goals and thus execute
multiple plans concurrently, as long as they do not in-
terfere.
5 MULTI-AGENT
COORDINATION
When a robot determines a plan to execute, it has to
coordinate with the other agents to avoid conflicts,
e.g., they must not use the same machine at the same
time. The CX allows multi-agent coordination by pro-
viding functionality for a shared world model and mu-
tual exclusion, the latter is used to implement locking
actions and goal resource allocation. We introduce
those concepts and explain how we apply them in the
RCLL.
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
86

5.1 Shared World Model
To cooperate effectively in a multi-agent setting,
agents need to share (parts of) their world model. To
do this, the CX shares the world model by using a
shared database. The database is set up as a replica
set, where each robot runs one instance of the replica
set. The replica set manages data distribution, shared
updates, and conflict resolution. The agent’s world
model is mirrored asynchronously to the database,
which allows the agent to continue operation, even
in the event of a temporary network outage, while
guaranteeing eventual consistency. Updates by the
other agents are first replicated on the local database
instance and then propagated to the agent’s world
model.
In the RCLL, we share world model facts that de-
scribe (a) the configuration and position of a work-
piece; (b) the state of a machine, e.g., for the CS, the
free spots on the shelf and the color of the buffered
cap (if any); (c) the state of an order, e.g., if the order
has been started already, and the workpiece that has
been assigned to the order. By sharing those world
model facts, each agent has all necessary information
to decide which goal to pursue next. However, an
agent does not know what the other agents do. In-
stead, we use locking actions and goal resource al-
location based on a mutual exclusion mechanism to
implement an effective multi-agent strategy.
5.2 Mutual Exclusion
In addition to a shared world model, the CX also pro-
vides functionality for coordination. As the primitive
principle, it provides mechanisms for mutual exclu-
sion by using the replicated database with a distin-
guished collection for mutexes. Whenever an agent
tries to acquire a mutex, it writes to the database
with majority acknowledgement, i.e., a majority of the
agents have to agree to the update. This way, only one
agent can hold the mutex at any point in time. In or-
der to cope with robots that unexpectedly fail, e.g.,
because of empty batteries, we implemented a mutex
expiration mechanism. Each agent maintains a dis-
tinguished EXPIRE-LOCKS goal that expires all mu-
texes that have been acquired more than 30 s ago. To
avoid early mutex expiration, each agent refreshes its
mutexes every 5 s by updating the timestamp in the
database.
5.3 Locking Actions
Using the mutual exclusion mechanism, primitive
lock and unlock actions were implemented, which
temporarily lock an object that the agent needs ex-
clusive access to. The executor of a locking action
requests a mutex for the given object. The action suc-
ceeds once the mutex is acquired and fails if the mu-
tex is rejected, e.g., because it is being held by another
agent. The execution of unlocking works analogously.
The example in Listing 1 demonstrates delivering
a product at the DS. Before operating the DS, the
robot locks it to prevent simultaneous access of other
robots to the MPS.
Another application of mutexes as primitive ac-
tions are location-lock and location-unlock ac-
tions, implementing location-based locking, similar
to the ideas of (Niemueller et al., 2017b). For a loca-
tion lock, the mutex is released only when the robot is
physically far enough from the object, i.e, 0.5 m away.
They are used to ensure that no two robots intend to
go to the same location simultaneously. The example
in Listing 1 demonstrates the usage of location locks.
Before moving to the DS (in line 3), the location is
locked (in line 2). Later on, the location-unlock
action (in line 9) succeeds immediately, yet it will
asynchronously ensure that the location is only un-
locked when the robot has moved away. To resolve
potential deadlocks (e.g., if two robots want to swap
positions), robots navigate to a waiting position be-
fore trying to lock their destination (in line 1).
5.4 Goal Resource Allocation
Apart from primitive locking actions, we also use the
mutual exclusion mechanisms to coordinate goal exe-
cution among the agents. Each goal has a set of asso-
ciated resources, which must be held during its whole
execution. This is done in the CX by requesting a mu-
tex for each specified resource of a committed goal.
The goal is only dispatched if all required resources
have been acquired, otherwise it will be rejected. Af-
ter the goal has finished, acquired resources are auto-
matically released. Thus, in contrast to lock actions,
which only lock a resource for parts of the plan, a re-
source is exclusively assigned to one agent throughout
the execution of the respective goal.
Generally, a goal needs to require an object as re-
source if it changes the state of that object, as this
may conflict with other goals. In the RCLL, the
main source of conflicts occur when robots operate
the same (a) machines, (b) orders, and (c) workpieces.
Thus, every goal that operates on any of those needs to
acquire the respective resources. The design outlined
in Section 4.1.1 implies that transportation goals will
eventually lead to a machine instruction at the destina-
tion MPS. Each assembly step changes the properties
of the destination MPS and the workpiece; the former
Multi-Agent Goal Reasoning with the CLIPS Executive in the RoboCup Logistics League
87

by consuming available material, the latter by chang-
ing the location and possibly the assembly progress.
Therefore, workpieces and destination machines have
to be locked as resources. In a delivery step on the
other hand, the destination machine is not affected by
the processing of a placed workpiece. For this reason,
it is not necessary to lock it as resource. In fact, by
not doing so and instead only locking it with a lock
action, it is possible for two robots to each dispatch
a delivery goal simultaneously, e.g., because products
were finished by each of the two CS around the same
time.
6 ROBUST EXECUTION
Once a simple goal committed to a plan and acquired
all required resources, the goal is dispatched and the
plan execution starts, involving the call to the sys-
tem’s action executors, monitoring of the execution
and evaluation of the results. The approach to deal
with failures and unexpected events is two-fold in the
CX. On the one hand an agent may re-evaluate the
actions scheduled to reach the current goal. This is
called execution monitoring. On the other hand it can
be necessary to re-evaluate the world model, since
the failed action may have unexpected effects on the
world.
6.1 Action Execution
The CX utilizes the PDDL domain description to con-
trol plan execution. The action selection determines
the action to execute next, marks it as pending and
only passes it to the executor once all its preconditions
are met. This ensures that during execution the plan-
ner model and the actual world model do not diverge.
The CX supports multiple executors, e.g., it can exe-
cute physical actions by passing the action to the sys-
tem’s Lua-based Behavior Engine (Niemueller et al.,
2010), while a different executor handles MPS com-
munication tasks. After an action has been executed,
its effects are applied to the agent’s world model. The
CX also supports sensed effects: instead of blindly
applying an effect the CX waits until the sensed ef-
fect has been observed, before the remaining effects
are applied and the action is marked as final. In the
RCLL, we make use of sensed effects to model ma-
chine interactions. After sending an instruction, the
agent waits for a status update from the refbox and
only then applies the action’s effects, e.g., a work-
piece going from the input to the output of the ma-
chine.
6.2 Execution Monitoring
Occasionally, the execution of an action may fail or
the world may change in an unexpected way. In these
cases, the agent has to decide how to continue with the
execution of the current plan. Execution monitoring
has three different ways to react on a failure or unex-
pected change. It can retry a failed action, adapt the
planned action in hindsight of a unexpected change or
abort the current action and/or goal.
Retrying. If an action failure occurs, the execu-
tion monitoring may decide to retry that action using
information about the number of previous fails and
the cause of failure, provided by the executor, to aid
the decision. For example, a failed alignment to the
conveyor belt should be retried, whereas a failed grab-
bing often knocks down the workpiece and therefore
should not be retried.
Plan Adaptation. Unexpected changes to the
world model may require an agent to change the
planned sequence of actions. For example, the agent
may try to retrieve a workpiece from the BS, which
is accessible from both sides. If during execution the
desired side is already occupied by another robot, the
agent can switch to the other side.
Aborting. Since the agent will wait for all pre-
conditions of an action to be fulfilled before starting
the execution, the action can get stuck upon waiting
for an unsatisfied precondition. Those failures are
typically caused by network issues causing a tem-
porary inconsistent world model or because an ex-
ogenous event did not convey the anticipated effects,
e.g., an MPS instruction may have been marked as
successful but the machine failed to complete the re-
quested operation, resulting in an unexpected state.
Similarly, sensed effects the agent is waiting for may
never be observed. In order to deal with these kinds of
situations, the execution monitoring maintains time-
outs for those action states. As soon as a timeout is
reached, the action is aborted.
Also, a goal that utilizes a certain machine may
become infeasible when the state of the machine
changes unexpectedly during the pursuit of the goal.
This mainly happens due to workpieces being mis-
placed on the conveyor belt or a MPS failure during
assembly. In these cases, the machine will end up
being temporarily broken. Goals that rely on such a
broken machine are aborted by the execution moni-
toring.
6.3 World Model Re-evaluation
Some failures may have additional undesired effects,
e.g., a failed wp-put may leave a workpiece some-
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
88
where on the machine. We deal with those effects
either during the evaluation of a failed goal (e.g., re-
moving the workpiece after a failed wp-put action),
or by reacting on exogenous events (e.g., when a ma-
chine breaks due to mishandling, all workpieces and
materials buffered at the MPS are removed).
6.4 Maintenance and Reinsertion
In the unfortunate scenario where a robot fails to stay
operational, a human operator may decide to tem-
porarily remove it from the game for maintenance.
The lock expiration, as described in Section 5.2, en-
sures that the locks held by a malfunctioning agent are
released eventually. This allows other agents to take
over tasks and/or resources that were previously allo-
cated to the suspended agent. When the maintenance
time is over, the human operator may decide to rein-
sert the maintained agent into the game. On startup,
the agent senses that a game has already been running
and retrieves all world model facts from other agents.
7 EVALUATION
We evaluate the performance of our approach based
on both competitive and test games, providing data
from three robots that accumulated a total running
time of about 36 hours.
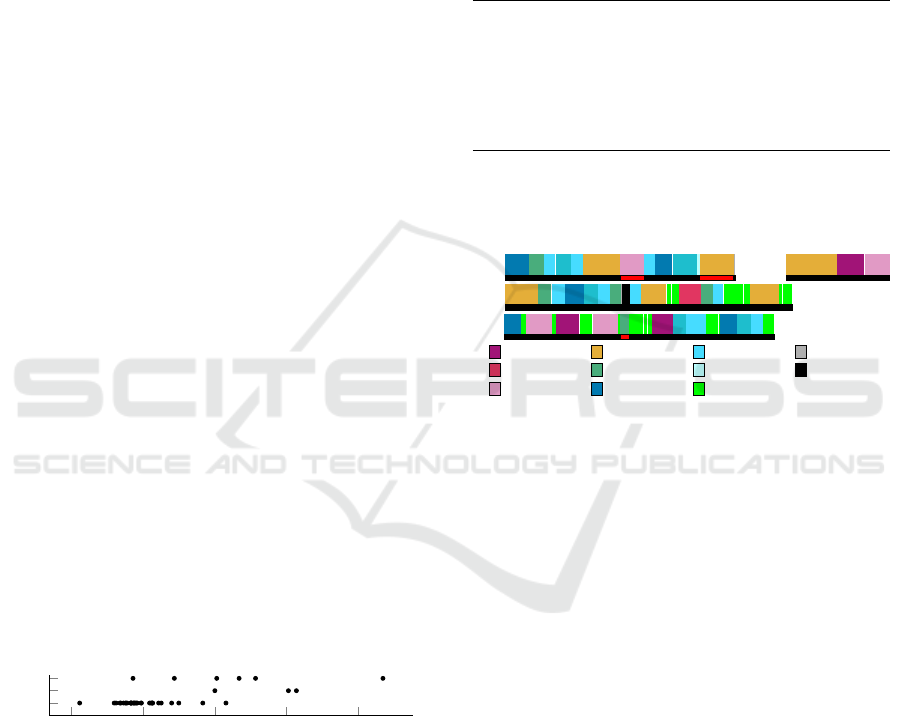
Game Level. Figure 5 shows the production time
of successfully delivered products. Deliveries of
C0 products take mostly between 2.5 min and 4 min.
Most of the time, the production of C1 products was
disabled as strategic decision to reserve the RS for
more complex orders, so the low delivery number was
expected. This payed off by yielding six delivered C2
products.
0 s 200 s 400 s 600 s 800 s
C0
C1
C2
Figure 5: Time of successfully delivered workpieces, accu-
mulated from 33 C0, 3 C1 and 6 C2 deliveries.
Goal Level. Figure 6 shows statistics on all simple
goals from the production tree. It can be seen that
roughly 28 % of the total time was spent on goals that
eventually failed. This emphasizes the importance of
robust execution that recovers from those failures.
Figure 7 depicts a schedule of all dispatched goals
throughout our most successful competitive RCLL
game, where two C0 and one C2 were delivered and
a C3 was almost finished. One robot had to be rein-
serted after a major failure and the other two robots
became inoperable shortly after that. We chose to not
reinsert them into the game as there was not enough
time to finish another order. Not having them obstruct
paths of the last robot made it more likely to finish the
production in progress. In this particular game, the
third robot delivered the C2 product right before the
end of the game.
goal class FIN FAIL TIME(FIN) TIME(FAIL) failure rate avg(TIME)
FILL-CAP 108 113 7152.17 3474.16 0.51 48.48
WAIT-FOR-MPS 1700 309 4720.39 317.3 0.15 1.9
CLEAR-MPS 77 69 3119.99 1779.71 0.47 33.16
RESET-MPS 63 3 155.81 60.05 0.05 11.24
MOUNT-FIRST-RING 61 133 5741.08 3152.51 0.69 58.91
MOUNT-NEXT-RING 24 13 1944.87 606.05 0.35 63.83
MOUNT-CAP 17 12 1364.07 533.24 0.41 62.34
PRODUCE-C0 43 32 3633.44 1832.41 0.43 70.88
DELIVER 38 14 3009.83 960.09 0.27 73.89
WAIT 337 0 817.69 0 0 2.43
GO-WAIT 47 371 454.33 200.48 0.89 5.1
DISCARD 39 6 324.61 92.03 0.13 11.83
FILL-RS 179 88 8576.59 3326.4 0.33 43.02
TOTAL 2733 1163 41014.87 16334.43
Figure 6: Statistics on executed simple goals from the pro-
duction tree. MOUNT-RING is split into distinct goals depend-
ing on the type of source MPS. Times in seconds.
R-1
R-2
R-3
DELIVER
MOUNT-CAP
PRODUCE-C0
MOUNT-RING
CLEAR-MPS
FILL-CAP
FILL-RS
DISCARD
WAIT-FOR-MPS
GO-WAIT
WAIT
Figure 7: Goal schedule of a full 17 minute RCLL game.
The bottom bar of each schedule indicates the goal out-
comes, black for completed and red for failed goals.
Action Level. Looking into more detail on the fail-
ures on action level, we can distinguish three task
types that significantly differ from each other in the
failure rate: (a) Moving operations, where the failure
rate is well below 10 %. Failures are mainly caused
by temporarily unreachable positions. (b) Conveyor
belt operations and discards, with a failure rate around
15 %. Failures on any picking or putting action may
be caused by alignment issues, decalibrated gripper
axes, or failures to detect the object in the gripper.
(c) CS shelf and RS slide operations with more than
35 % failure rate. The CS and RS shelves are harder
to accurately detect due to their shape and position on
the respective machines.
Comparing the duration of action execution with
the dispatched simple goal durations may give an idea
of the occurring overhead such as synchronizing the
world model, handling of locks, and execution moni-
toring that happen in between actions. Evaluating the
total times on failed and successfully executed goals
from Figure 6 against the subsumed action execution
times it can be seen that around 77 % of the goal exe-
cution time was spent on running actions.
Multi-Agent Goal Reasoning with the CLIPS Executive in the RoboCup Logistics League
89

20 s 40 s 60 s 80 s 100 s
go-wait
move
wp-get
wp-put
wp-get-shelf
wp-put-slide-cc
wp-discard
Figure 8: Boxplots of successfully executed action timings.
Execution Monitoring. We first consider retrying
failed actions. There were 134 plan executions that
contained at least one action retry; 22 % of those re-
solved the problem such that the respective goal was
successful. Considering that action failures can have
a severe impact on a game, e.g., it may lead to work-
pieces getting lost, every successful recovery may sig-
nificantly increase the overall performance.
Execution monitoring also aborted 422 actions
that were stuck, because preconditions were not met
until a timeout threshold was reached. 83 % of those
stuck actions concern machine assembly steps, indi-
cating a malfunctioning MPS or a misplaced work-
piece.
Game Score. On average, we scored 123 points per
game, compared to an average of 110 points of the top
three teams at RoboCup 2019. Comparing the medi-
ans results in 135 versus 104 points. The relative devi-
ation of the score per game of our approach was 43 %
compared to 51 % of the top three teams. Thus, our
approach was both more successful and more robust
than the average of the top three teams at RoboCup
2019.
8 CONCLUSION
In this paper, we have described a multi-agent goal
reasoning approach to the RoboCup Logistics League
(RCLL), a smart factory scenario in which a team of
robots has to manufacture dynamically ordered prod-
ucts. The system is based on the CLIPS Executive
(CX) with an explicit goal representation, a goal life-
cycle, and the ability to coordinate a team of robots.
We have detailed how we designed goals that ac-
complish steps of the RCLL production process and
how we structured those goals in goal trees to define
an overall production strategy. We described a dis-
tributed multi-agent strategy that uses a shared world
model, locking actions, and goal resource allocation
to coordinate a team of robots. Goals are expanded
into a PDDL plan by using a plan library. To ac-
complish robust execution, we monitor the execution
and react to failed actions either by re-trying the ac-
tion, adapting the plan, or aborting the goal. We have
evaluated our system by analyzing RCLL games in a
competitive scenario. The evaluation shows that even
though the system frequently has to deal with failed
actions and goals, it is able to effectively control a
team of three robots and contributed to the success of
the team Carologistics at RoboCup 2019.
ACKNOWLEDGEMENTS
T. Hofmann was supported by the German Na-
tional Science Foundation (DFG) grant GL-747/23-1
on Constraint-based Transformations of Abstract
Task Plans into Executable Actions for Autonomous
Robots.
T. Hofmann and M. Gomaa were partly supported
by the German National Science Foundation (DFG)
research training group UNRAVEL - UNcertainty and
Randomness in Algorithms, VErification, and Logic
(GRK 2236/1).
T. Viehmann was supported by the German Na-
tional Science Foundation (DFG) Cluster of Excel-
lence EXC-2023 Internet of Production (390621612).
Travel funding for T. Viehmann, M. Gomaa, and
D. Habering was provided by the Hans-Hermann-
Voss-Stiftung.
We thank all other members of the Carologis-
tics RoboCup Team: D. Bosen, M. Claer, S. Eltester,
C. Gollok, N. Limpert, V. Matar
´
e, and M. Sonnet.
REFERENCES
Abel, D., Hershkowitz, D., Barth-Maron, G., Brawner, S.,
O’Farrell, K., MacGlashan, J., and Tellex, S. (2015).
Goal-based action priors. In Proceedings of the 25th
International Conference on Automated Planning and
Scheduling (ICAPS).
Aha, D. W. (2018). Goal Reasoning: Foundations,
Emerging Applications, and Prospects. AI Magazine,
39(2):3–24.
Alford, R., Shivashankar, V., Roberts, M., Frank, J., and
Aha, D. W. (2016). Hierarchical Planning: Relating
Task and Goal Decomposition with Task Sharing. In
Proceedings of the 25th International Joint Confer-
ence on Artificial Intelligence (IJCAI).
Bratman, M. (1987). Intention, Plans, and Practical Rea-
son. Center for the Study of Language and Informa-
tion.
Cashmore, M., Fox, M., Long, D., Magazzeni, D., Ridder,
B., Carrera, A., Palomeras, N., Hurtos, N., and Car-
reras, M. (2015). ROSPlan: Planning in the Robot
Operating System. In Proceedings of the 25th In-
ternational Conference on Automated Planning and
Scheduling (ICAPS), pages 333–341.
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
90

Coelen, V., Deppe, C., Gomaa, M., Hofmann, T., Karras,
U., Niemueller, T., Rohr, A., and Ulz, T. (2019). The
RoboCup Logistics League Rulebook for 2019.
Coles, A., Coles, A., Fox, M., and Long, D. (2010).
Forward-chaining Partial-order Planning. In Pro-
ceedings of the 20th International Conference on In-
ternational Conference on Automated Planning and
Scheduling (ICAPS), pages 42–49. AAAI Press.
Gebser, M., Kaminski, R., Kaufmann, B., and Schaub, T.
(2019). Multi-shot ASP solving with clingo. Theory
and Practice of Logic Programming, 19(1):27–82.
Hertle, A. and Nebel, B. (2018). Efficient auction based
coordination for distributed multi-agent planning in
temporal domains using resource abstraction. In Pro-
ceedings of the 41st German Conference on Artificial
Intelligence (KI).
Hofmann, T., Matar
´
e, V., Neumann, T., Sch
¨
onitz, S., Henke,
C., Limpert, N., Niemueller, T., Ferrein, A., Jeschke,
S., and Lakemeyer, G. (2018). Enhancing Software
and Hardware Reliability for a Successful Partici-
pation in the RoboCup Logistics League 2017. In
RoboCup 2017: Robot World Cup XXI, pages 486–
497. Springer International Publishing.
Ingrand, F., Chatila, R., Alami, R., and Robert, F. (1996).
PRS: A High Level Supervision and Control Lan-
guage for Autonomous Mobile Robots. In Pro-
ceedings of the IEEE International Conference on
Robotics and Automation.
Kitano, H., Asada, M., Kuniyoshi, Y., Noda, I., and Osawa,
E. (1997). RoboCup: The Robot World Cup Initiative.
In Proceedings of the 1st International Conference on
Autonomous Agents.
Leofante, F.,
´
Abrah
´
am, E., Niemueller, T., Lakemeyer,
G., and Tacchella, A. (2019). Integrated Synthe-
sis and Execution of Optimal Plans for Multi-Robot
Systems in Logistics. Information Systems Frontiers,
21(1):87–107.
Niemueller, T., Ferrein, A., and Lakemeyer, G. (2010).
A Lua-based behavior engine for controlling the hu-
manoid robot Nao. In RoboCup 2009: Robot Soccer
World Cup XIII.
Niemueller, T., Hofmann, T., and Lakemeyer, G. (2018).
CLIPS-based Execution for PDDL Planners. In 2nd
ICAPS Workshop on Integrated Planning, Acting, and
Execution (IntEx).
Niemueller, T., Hofmann, T., and Lakemeyer, G. (2019).
Goal reasoning in the CLIPS Executive for integrated
planning and execution. In Proceedings of the 29th
International Conference on Automated Planning and
Scheduling (ICAPS), pages 754–763.
Niemueller, T., Karpas, E., Vaquero, T., and Timmons, E.
(2016a). Planning competition for logistics robots in
simulation. In 4th ICAPS Workshop on Planning and
Robotics (PlanRob).
Niemueller, T., Lakemeyer, G., and Ferrein, A. (2013). In-
cremental task-level reasoning in a competitive fac-
tory automation scenario. In AAAI Spring Symposium
on Designing Intelligent Robots.
Niemueller, T., Lakemeyer, G., and Ferrein, A. (2015). The
RoboCup Logistics League as a Benchmark for Plan-
ning in Robotics. In 2nd ICAPS Workshop on Plan-
ning in Robotics (PlanRob).
Niemueller, T., Neumann, T., Henke, C., Sch
¨
onitz, S.,
Reuter, S., Ferrein, A., Jeschke, S., and Lakemeyer,
G. (2017a). Improvements for a Robust Production
in the RoboCup Logistics League 2016. In RoboCup
2016: Robot World Cup XX, pages 589–600. Springer
International Publishing.
Niemueller, T., Zug, S., Schneider, S., and Karras, U.
(2016b). Knowledge-Based Instrumentation and Con-
trol for Competitive Industry-Inspired Robotic Do-
mains. KI - K
¨
unstliche Intelligenz, 30(3):289–299.
Niemueller, T., Zwilling, F., Lakemeyer, G., L
¨
obach, M.,
Reuter, S., Jeschke, S., and Ferrein, A. (2017b).
Cyber-Physical System Intelligence. In Industrial In-
ternet of Things: Cybermanufacturing Systems, pages
447–472. Springer International Publishing.
Roberts, M., Apker, T., Johnson, B., Auslander, B., Well-
man, B., and Aha, D. W. (2015). Coordinating robot
teams for disaster relief. In Proceedings of the 28th
Florida Artificial Intelligence Research Society Con-
ference. AAAI Press.
Roberts, M., Hiatt, L., Coman, A., Choi, D., Johnson, B.,
and Aha, D. (2016a). ActorSim, A Toolkit for Study-
ing Cross-Disciplinary Challenges in Autonomy. In
AAAI Fall Symposium on Cross-Disciplinary Chal-
lenges for Autonomous Systems.
Roberts, M., Shivashankar, V., Alford, R., Leece, M.,
Gupta, S., and Aha, D. W. (2016b). Goal Reasoning,
Planning, and Acting with ActorSim, The Actor Sim-
ulator. In Proceedings of the 4th Annual Conference
on Advances in Cognitive Systems, volume 4.
Roberts, M., Vattam, S., Alford, R., Auslander, B., Karneeb,
J., Molineaux, M., Apker, T., Wilson, M., McMahon,
J., and Aha, D. W. (2014). Iterative Goal Refinement
for Robotics. In 1st ICAPS Workshop on Planning in
Robotics (PlanRob).
Sch
¨
apers, B., Niemueller, T., and Lakemeyer, G.
(2018). ASP-based time-bounded planning for logis-
tics robots. In Proceedings of the 28th International
Conference on Automated Planning and Scheduling
(ICAPS).
Shivashankar, V., Kuter, U., Nau, D., and Alford, R. (2012).
A Hierarchical Goal-based Formalism and Algorithm
for Single-agent Planning. In Proceedings of the
11th International Conference on Autonomous Agents
and Multiagent Systems, pages 981–988. International
Foundation for Autonomous Agents and Multiagent
Systems.
Ulz, T., Ludwiger, J., and Steinbauer, G. (2019). A
Robust and Flexible System Architecture for Fac-
ing the RoboCup Logistics League Challenge. In
RoboCup 2018: Robot World Cup XXII, pages 488–
499. Springer International Publishing.
Wilson, M. A., McMahon, J., Wolek, A., Aha, D. W.,
and Houston, B. H. (2018). Goal reasoning for au-
tonomous underwater vehicles: Responding to unex-
pected agents. AI Communications, 31(2):151–166.
Multi-Agent Goal Reasoning with the CLIPS Executive in the RoboCup Logistics League
91
