
Headway and Following Distance Estimation using a Monocular Camera
and Deep Learning
Zakaria Charouh
1,2 a
, Amal Ezzouhri
1,2
, Mounir Ghogho
1,3
and Zouhair Guennoun
2
1
International University of Rabat, College of Engineering & Architecture, TICLab, Morocco
2
ERSC Team, Mohammadia Engineering School, Mohammed V University in Rabat, Morocco
3
University of Leeds, Faculty of Engineering, Leeds, U.K.
Keywords:
Driving Behavior, Headway, Safety Distance, Roadside Camera, Computer Vision, Deep Learning.
Abstract:
We propose a system for monitoring the headway and following distance using a roadside camera and deep
learning-based computer vision techniques. The system is composed of a vehicle detector and tracker, a
speed estimator and a headway estimator. Both motion-based and appearance-based methods for vehicle
detection are investigated. Appearance-based methods using convolutional neural networks are found to be
most appropriate given the high detection accuracy requirements of the system. Headway estimation is then
carried out using the detected vehicles on a video sequence. The following distance estimation is carried
out using the headway and speed estimations. We also propose methods to assess the performance of the
headway and speed estimation processes. The proposed monitoring system has been applied to data that we
have collected using a roadside camera. The root mean square error of the headway estimation is found to be
around 0.045 seconds.
1 INTRODUCTION
Rear-end collisions are considered one of the most
common types of traffic accidents globally and lead to
a significant number of injuries and fatalities. For in-
stance, in the USA, about one-third of all crashes were
rear-end crashes (NHTSA, 2003). In the Netherlands,
35% of all highways crashes are rear-ended crashes
(van KAMPEN, 2000). In Japan, rear-end crashes
represent about 28% of total crashes (ITARDA, 2003)
(ITARDA, 1998).
Headway is usually defined as the elapsed time be-
tween the front of the leading vehicle passing a point
on the roadway and the front of the following vehi-
cle passing the same point (Michael et al., 2000). The
two-second rule (RSA, 2012) is the most important
guide to maintain a safe trailing distance, where the
follower should stay at least two seconds behind the
vehicle in front, regardless of the vehicle speed.
The authors of (Brackstone et al., 2009) and
(Brackstone et al., 2002) studied the relationship be-
tween the velocity and the headway; they equipped
vehicles with sensors such as a Radar Rangefinder to
measure the relative distance to surrounding vehicles.
a
https://orcid.org/0000-0003-2867-5491
In (Robert Tscharn, 2018), (Lewis-Evans and Rothen-
gatter, 2009), (Siebert et al., 2014) and (Siebert et al.,
2017), the authors used a simulator to study the effects
of velocity and driving environment on the headway.
The authors of (Knospe et al., 2002) used two detec-
tors, one for each direction; each detector consists of
three inductive loops, one for each lane. An inductive
loop is able to analyze single-vehicle data to perform
classification based on the measured vehicle length;
this means that the system cannot distinguish between
trucks and buses as all heavy vehicles are categorized
in one class.
In this paper, we present a system to monitor driv-
ing behavior data, such as the headway, the following
distance, the lane occupation, the speeds of passing
vehicles as well as their classification (i.e. car, truck,
or bus, etc.). The measurements are performed using
video traffic analysis. The system is composed of five
main core components : (1) optical sensor, (2) object
detection, (3) tracking, (4) speed estimation, and (5)
safety distance estimation.
In order to provide an accurate estimation of the
vehicle speed and safety distance, reliable vehicle de-
tection results are needed. Many object detection
methods have been proposed in the literature. They
can be categorized into two classes: motion-based de-
Charouh, Z., Ezzouhri, A., Ghogho, M. and Guennoun, Z.
Headway and Following Distance Estimation using a Monocular Camera and Deep Learning.
DOI: 10.5220/0010253308450850
In Proceedings of the 13th International Conference on Agents and Artificial Intelligence (ICAART 2021) - Volume 2, pages 845-850
ISBN: 978-989-758-484-8
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
845

tection methods and appearance-based methods. The
former uses a sequence of video frames to detect mov-
ing objects (i.e vehicles) (Charouh et al., 2019). The
latter uses video frame pixels to detect and recognize
vehicles by analyzing contours, contrast, and other vi-
sual features. Within the second class of methods,
Convolutional Neural Networks (CNNs) have been
shown in recent years to provide highly accurate ob-
ject detection and classification. Several improve-
ments to the first CNN have been made to optimize
run-time, such as Faster-RCNN by the introduction of
Regional Proposal Network (RPN) (Ren et al., 2015).
Furthermore, by combining the tasks of generating re-
gion proposals and classifying them into one network,
YOLO (You Only Look Once) and YOLOv2 meth-
ods have been shown to provide better performance
in terms of computational time than Faster-RCNN; in
terms of accuracy, they are inferior to R-CNN family
of methods. Since in our study, the accuracy is the
most important metric, opted for the Faster R-CNN
method for vehicle detection.
Many object tracking approaches have been pro-
posed. They can be classified into three categories:
(1) point tracking, where objects detected in consecu-
tive frames are represented by points, and their asso-
ciation is based on the previous object state; (2) kernel
tracking, which refers to the object shape and appear-
ance, where the tracking is achieved by computing
the motion of the kernel in consecutive frames; (3)
silhouette tracking, which consists of estimating the
region of the object in each frame; The silhouettes are
tracked by shape matching or contour evolution (Yil-
maz et al., 2006).
The safety-distance models rely on the idea that
the driver of the following vehicle tends to maintain a
safe distance to avoid a collision in the event of sud-
den braking of the lead vehicle. The Gipps model
(Gipps, 1981) is a typical safety-distance model. The
model includes two modes of driving: free-flow and
car-following.
The remainder of the paper is organized as fol-
lows: in section II, we describe the data collection
process. Section III discusses the system compo-
nents and the methodology including vehicle detec-
tion, tracking, removing the projective distortion, and
speed estimation. Section IV describes the headway
and following distance estimation methods. Section
V discusses the results. Section VI concludes the pa-
per.
Figure 1: Example of a video frame.
2 DATA COLLECTION
We use a video system to acquire traffic data. The sys-
tem is composed of a network video recorder (NVR)
and an IP camera powered through PoE (Power over
Ethernet). The video streams are then sent to a com-
pact computer via Ethernet and recorded at 25 Hz
with a resolution of 2560 x 1440. An example of a
video frame is shown in “Fig. 1”. The system was in-
stalled at the main entrance of the International Uni-
versity of Rabat, where speed is limited to 40 Km/h.
To validate our speed estimation method, the
ground truth vehicle’s speed is extracted using the On-
Board Diagnostics 2 protocol (OBD-II) over the CAN
(i.e. Controller Area Network) bus and transferred for
storage to the driver’s smartphone using a Bluetooth
connection.
To validate our headway estimation technique, the
ground truth headway is obtained using the video
recording system of a smartphone placed beside the
road; the videos are analyzed to measure the times-
tamps of vehicles passing a region of interest, and the
headway is determined as the difference between two
consecutive timestamps. The videos are recorded at
30 Hz with a resolution of 1920 x 1080.
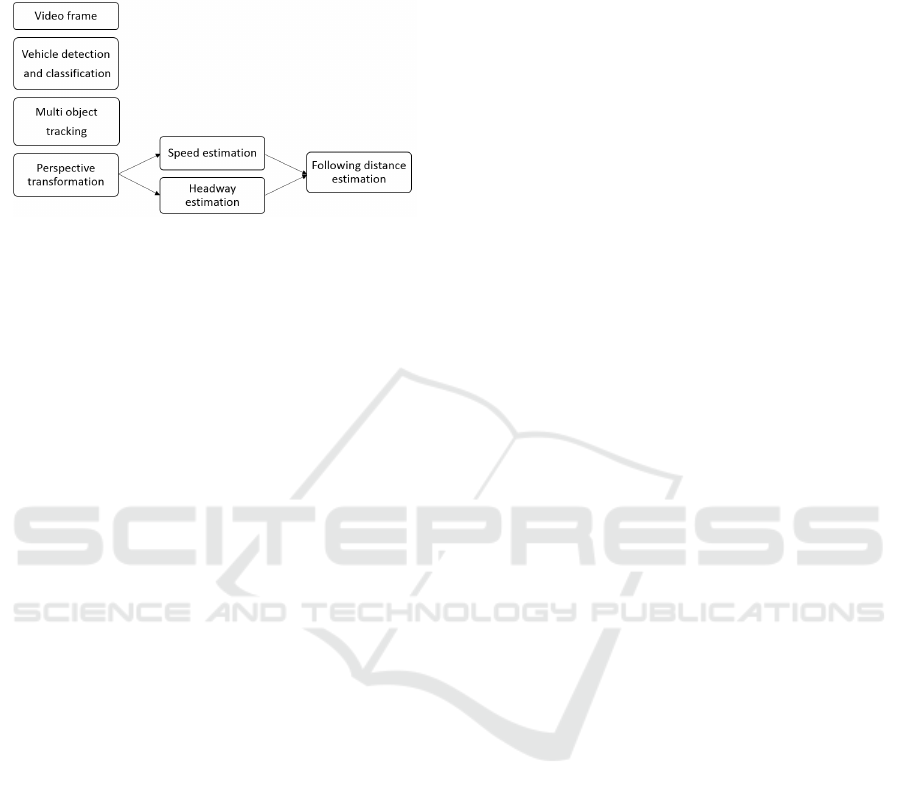
3 METHODOLOGY
As mentioned above, the proposed system is com-
posed of four components: a detector, a tracker, a
speed estimator, and a following-distance estimator.
The detector represents the main component of the
system. Before applying the detection method, the
video frames are pre-processed to select only the re-
gion of interest covering the road. The detector and
tracker operate as follows: the video sequence is pro-
cessed frame by frame, each frame is fed to the de-
tector, the detector then outputs all vehicles present
in the scene, specifying their positions and types. To
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
846
improve performance, the tracker combines detec-
tion and prediction of vehicles’ positions on the next
frame.
Figure 2: The proposed methodology.
3.1 Object Detection
We use the Faster RCNN algorithm as a detector. It is
composed of two modules. The first module is a Re-
gion Proposal Network (RPN) which takes an image
as input and proposes regions with a wide range of
scales and aspect ratios. The second module is a clas-
sifier, which takes as input the proposed regions and
returns the positions and the types of vehicles (Ren
et al., 2015). In this work, the Faster R-CNN uses
the intermediate features of ResNet-50 to aid in the
region proposal task.
In our study, the vehicles appear in some specific
shapes, which is due to the fact that our cameras were
oriented to capture the rear-ends of vehicles, and also
to the dimensions of the heavy vehicles. So we modi-
fied some scales and aspect ratios which influence the
RPN, so that the proposed regions match all of the
vehicle types that we can observe in the scene.
The video frames are captured with a camera
placed on an 8m-high highway bridge. The camera is
oriented so that it captures the rear-ends of the pass-
ing vehicles. To train the vehicle detector in this set-
ting, we generated a dataset of frames containing ve-
hicles that we have labeled by specifying their types
and positions. We generated 925 images, including
1226 vehicles, 323 trucks, 858 cars, and 45 buses.
To increase the dataset size, we applied the following
data augmentation techniques: horizontal flip, adding
of a Gaussian Noise, and adding of a salt-and-pepper
noise. Thus, the detector was trained using 7400
frames.
3.2 Tracker
The detector and tracker are applied to every frame.
The result of this operation gives one of the following
4 cases: (1) a tracked vehicle which is detected in the
current frame, (2) a new vehicle is detected but not yet
tracked, (3) a tracked vehicle which is not detected in
the current frame (this is referred to as a predicted
vehicle), and (4) a predicted vehicle which was not
detected.
The tracker has two sources of information: pre-
dicted vehicles and detected vehicles. We use the
Munkres algorithm (Munkres, 1957) to assign each
detection to the appropriate tracked vehicle. The al-
gorithm takes as input the prediction and detection re-
sults and measures the cost of associating each detec-
tion to a tracked vehicle. The cost is calculated using
the sum of distances between the centroids of the pre-
dicted and detected vehicles.
To predict new positions of vehicles, we assume
that the vehicle speed does not significantly vary from
one frame to the next, so we use a simplified version
of the Kalman filter to construct our predictor. The
state vector consists of the centroids’ coordinates and
velocities along the 2 axes. The coordinates are ob-
tained directly from the detector, whereas the velocity
is calculated using the previous and the current cen-
troid’s positions.
When a new vehicle is detected, we start to track
it; but as it can be a false positive detection, we con-
sider it as a temporary vehicle until we succeed to
consistently track it over a determined number of suc-
cessive frames, in which case it is considered a real
tracked vehicle.
We predict the next positions of tracked vehicles
using the last velocity and the last position. In some
cases, the detector can fail in detecting the vehicle
in the scene, (e.g. occluded vehicle), so the pre-
dicted position will be used as the real positions of
the tracked vehicle, and the velocity will no be up-
dated. This prediction in the absence of detection will
continue over a number of frames beyond which the
vehicle is considered to be lost and thus removed from
the list of tracked vehicles. We also remove from this
list the tracked vehicles whose coordinates go beyond
the region of interest.
3.3 Removing the Projective Distortion
Vehicle detection and tracking are essential in many
road traffic applications, such as vehicle counting,
speed estimation, lane occupation estimation, head-
way estimation, etc.. Counting vehicles does not re-
quire precise positioning of the vehicles on the road.
However, to estimate lane occupations, speeds, and
headways, we need to estimate the vehicles’ positions
accurately, and we need to be able to measure real dis-
tances, i.e. values must be converted from the pixel
domain to the real-world domain.
Headway and Following Distance Estimation using a Monocular Camera and Deep Learning
847

As described in 3a, parallel lines on the scene plane
(i.e. the real world) are not parallel on the image;
see Fig. 1. This is known as perspective distortion.
To remove this, we used a planar projective trans-
formation (Hartley and Zisserman, 2003) also called
Homography, which is a mapping between the two
planes. We randomly selected a set of points on the
road, and measured their coordinates using a laser dis-
tance measurer and a reference point on the road. The
coordinates of the corresponding points in the pixel
domain are obtained from an image of the scene, as
shown in Fig. 3a. More details are given next.
Let the coordinates of points p and p
0
in the image
and the real-world be (x, y) and (x
0
, y
0
), respectively.
The mapping may be expressed by
x
0
=
h
11
x + h
12
y + h
13
h
31
x + h
32
y + h
33
(1)
y
0
=
h
21
x + h
22
y + h
23
h
31
x + h
32
y + h
33
(2)
where the coefficients {h
i, j
} are to be estimated. Each
point correspondence generates two equations:
x
0
(h
31
x + h
32
y + h
33
) = h
11
x + h
12
y + h
13
(3)
y
0
(h
31
x + h
32
y + h
33
) = h
21
x + h
22
y + h
23
. (4)
Four-point correspondences are sufficient to estimate
all parameters. In our study, we used 16 points, and
obtain the following a non-singular 3 by 3 matrix
H =
h
11
h
12
h
13
h
21
h
22
h
23
h
31
h
32
h
33
=
1.23 1.14 −1629.28
−0.69 24.54 −885.28
−0.00046 0.015 1
Fig. 3b validates this estimation as in the transformed
image, the lines appear parallel and the road appears
to have its true geometric shape.
3.4 Speed Estimation
To estimate the vehicle speed, we extract its real po-
sition at every frame, and use the video frame rate (i.e
the number of frames per second). The average speed
is calculated using kinematics. In our study, we cal-
culate the distance traveled during 1 second.
(a) (b)
Figure 3: A) Preparing the mapping between pixel domain
and real world. (b) The synthesized image using Homogra-
phy.
4 HEADWAY AND FOLLOWING
DISTANCE ESTIMATION
Tailgating can cause rear-end collisions, which are
one of the most common types of traffic accidents.
To make safety distance measurement, the vehi-
cles should be in a vehicle following situation. The
latter is defined here as a situation where the follow-
ing vehicle is within a 150m range of the car in front
(Wiedemann and Reiter, 1992), and the headway is
less than 5 seconds (TRBNR, 2000).
We focus on estimating the headway as the follow-
ing distance can be obtained from the headway esti-
mate and vehicle speed estimate.
To measure the headway, we set a virtual line and
a timer. When the front of the vehicle passes on
the line, the timer starts running until another vehicle
passes or a five seconds duration expires. The follow-
ing vehicle situation assumes that the two vehicles are
on the same lane. Since vehicles may not respect the
lane boundaries, some vehicles may be detected to be
present on two lanes, thus implying sometimes a false
following situation. To solve this, we used thresholds
to verify the presence of vehicles on the lane.
5 TEST AND RESULTS
To assess the reliability of the proposed system, we
evaluate its overall performance instead of measuring
each component’s effectiveness. The ground truth on
vehicle speed is obtained from the CAN bus, through
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
848

OBD-II (On-Board Diagnostics 2), of the vehicle that
we have used for testing. The speeds are sent to a
smartphone using a Bluetooth connection. To avoid
a-synchronization issues between the OBD and the
smartphone application, we have asked the volunteer-
ing drivers to maintain a constant speed using cruise
control. We have evaluated our system by analyzing
the mean squared error, which was found to be around
given 0.92 km/h. A comparison between the speeds
measured by the OBD-II and speeds estimated by our
system are shown in Table. 1.
Table 1: Results of speed estimation.
Estimated speed OBD-II-based speed
33.5 32.37
52 51.49
39.60 40
57.2 56.55
60.7 59.68
42.3 41.88
65.4 66.1
68.90 70.55
46.2 46.55
30.1 31.68
The headway and distance estimation tests are done
using a fixed camera that we have placed beside the
road, visualizing and capturing line crossings of vehi-
cles as shown in Fig. 4’. We have asked drivers to use
the same lane, so that the vehicles can be a vehicle fol-
lowing situations. The videos are recorded at 30 Hz.
We have added a virtual line to the frames and ob-
served the video sequences frame by frame to obtain
the ’true’ headway, which is estimates using the num-
ber of the frame from the moment a vehicle passed on
the line and the moment the following vehicle does.
Figure 4: Experimental setup to manually measure the
headway.
Using the ground truth values described above, we
have evaluated the performance of our headway es-
timation method. The corresponding mean squared
error is found to be around 0.002 second. A compari-
son between the measured and estimated headways is
shown in Table. 2.
Table 2: Comparison of the measured and estimated head-
ways.
Estimated headway Measured headway
3.1 3
2.7 2.7
2.16 2.2
2.8 2.8
3.5 3.47
1.7 1.73
2 2.07
2.22 2.23
6 CONCLUSIONS
In this paper, we presented a system to measure the
headway using computer vision and deep learning
techniques. The system is also able to estimate speeds
and lane occupations, to count vehicles, etc. The sys-
tem uses the faster R-CNN as a detector and classi-
fier, which we have trained on datasets that we have
built using roadside cameras. We have also pro-
posed a method to validate speed and headway esti-
mations. The obtained results are promising as the
mean squared error (MSE) on headway estimation is
shown to be around 0.002 seconds.
ACKNOWLEDGEMENTS
This work is funded through HowDrive project by the
Moroccan Ministry of the Equipment, Transport, Lo-
gistics and Water via the National Center for Scien-
tific and Technical Research (CNRST).
REFERENCES
Brackstone, M., Sultan, B., and McDonald, M. (2002). Mo-
torway driver behaviour: studies on car following.
Transportation Research Part F: Traffic Psychology
and Behaviour, 5(1):31–46.
Brackstone, M., Waterson, B., and McDonald, M. (2009).
Determinants of following headway in congested traf-
fic. Transportation Research Part F: Traffic Psychol-
ogy and Behaviour, 12(2):131–142.
Charouh, Z., Ghogho, M., and Guennoun, Z. (2019). Im-
proved background subtraction-based moving vehicle
detection by optimizing morphological operations us-
ing machine learning. In 2019 IEEE International
Symposium on INnovations in Intelligent SysTems and
Applications (INISTA), pages 1–6. IEEE.
Headway and Following Distance Estimation using a Monocular Camera and Deep Learning
849

Gipps, P. G. (1981). A behavioural car-following model for
computer simulation. Transportation Research Part
B: Methodological, 15(2):105–111.
Hartley, R. and Zisserman, A. (2003). Multiple view geom-
etry in computer vision. Cambridge university press.
ITARDA (1998). Itarda traffic statistics, institute for traffic,
accident research and data analysis.
ITARDA (2003). Traffic statistics of japan institute for
traffic accident research and data analysis, tokyo (in
japanese).
Knospe, W., Santen, L., Schadschneider, A., and Schreck-
enberg, M. (2002). Single-vehicle data of high-
way traffic: Microscopic description of traffic phases.
Physical Review E, 65(5):056133.
Lewis-Evans, B. and Rothengatter, T. (2009). Task diffi-
culty, risk, effort and comfort in a simulated driving
task—implications for risk allostasis theory. Accident
Analysis & Prevention, 41(5):1053–1063.
Michael, P. G., Leeming, F. C., and Dwyer, W. O. (2000).
Headway on urban streets: observational data and an
intervention to decrease tailgating. Transportation
research part F: traffic psychology and behaviour,
3(2):55–64.
Munkres, J. (1957). Algorithms for the assignment and
transportation problems. Journal of the society for in-
dustrial and applied mathematics, 5(1):32–38.
NHTSA (2003). Traffic safety facts, national highway
traffic safety administration, u.s. department of trans-
portation washington d.c.
Ren, S., He, K., Girshick, R., and Sun, J. (2015). Faster
r-cnn: Towards real-time object detection with region
proposal networks. In Advances in neural information
processing systems, pages 91–99.
Robert Tscharn, Frederik Naujoks, A. N. (2018). The per-
ceived criticality of different time headways is de-
pending on velocity. In Transportation Research Part
F.
RSA (2012). The two-second rule, road safety authority
(government of ireland).
Siebert, F. W., Oehl, M., Bersch, F., and Pfister, H.-R.
(2017). The exact determination of subjective risk and
comfort thresholds in car following. Transportation
research part F: traffic psychology and behaviour,
46:1–13.
Siebert, F. W., Oehl, M., and Pfister, H.-R. (2014). The in-
fluence of time headway on subjective driver states in
adaptive cruise control. Transportation research part
F: traffic psychology and behaviour, 25:65–73.
TRBNR (2000). Special report 209: Highway capacity
manual transportation research board from national
research council washington d.c.
van KAMPEN, B. (2000). Factors influencing the occur-
rence and outcome of car rear-end collisions: The
problem of whiplash injury in the netherlands. IATSS
research, 24(2):43–52.
Wiedemann, R. and Reiter, U. (1992). Microscopic traf-
fic simulation: the simulation system mission, back-
ground and actual state. Project ICARUS (V1052) Fi-
nal Report, 2:1–53.
Yilmaz, A., Javed, O., and Shah, M. (2006). Object track-
ing: A survey. Acm computing surveys (CSUR),
38(4):13–es.
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
850
