
Let’s Do the Time Warp Again: Human Action Assistance for
Reinforcement Learning Agents
Carter B. Burn
1
, Frederick L. Crabbe
1
and Rebecca Hwa
2
1
Dept. of Computer Science, United States Naval Academy, Annapolis, MD, U.S.A.
2
Dept. of Computer Science, University of Pittsburgh, Pittsburgh, PA, U.S.A.
Keywords:
Human-assisted Reinforcement Learning, Action-advice, Time-warp.
Abstract:
Reinforcement learning (RL) agents may take a long time to learn a policy for a complex task. One way to
help the agent to convergence on a policy faster is by offering it some form of assistance from a teacher who
already has some expertise on the same task. The teacher can be either a human or another computer agent,
and they can provide assistance by controlling the reward, action selection, or state definition that the agent
views. However, some forms of assistance might come more naturally from a human teacher than a computer
teacher and vice versa. For instance, a challenge for human teachers in providing action selection is that
because computers and human operate at different speed increments, it is difficult to translate what constitutes
an action selection for a particular state in a human’s perception to that of the computer agent. In this paper,
we introduce a system called Time Warp that allows a human teacher to provide action selection assistance to
the agent during critical moments of the training for the RL agent. We find that Time Warp is able to help the
agent develop a better policy in less time than an RL agent with no assistance and rivals the performance of
computer teaching agents. Time Warp also is able to reach the results with only ten minutes of human training
time.
1 INTRODUCTION
Reinforcement learning (RL) enables an agent to im-
prove its ability to solve decision-making tasks as
it interacts with a complex environment (Sutton and
Barto, 1998). As it learns, the agent develops a policy
to determine which actions to take in order to pro-
duce desirable outcomes in the environment. While
most RL methods learn this policy through a trial-and-
error process with no external guidance, some studies
suggest that a teacher may provide worthwhile assis-
tance to the agent still in training; that is, the teacher
can help the learning agent to develop a better pol-
icy at a faster rate (Torrey and Taylor, 2013). The
role of the teacher may be played by either a human
or a computer agent that has already been trained in
the domain. Although one might expect humans to
be better teachers (since they have a broader view of
the problem and can typically perform the tasks bet-
ter than trained computer agents) results from pre-
vious work seem to suggest otherwise (Thomaz and
Breazeal, 2006).
This paper re-examines the problem of assisting
learning agents. We divide the space of types of as-
sistance into three categories:
1. Reward Feedback: the teacher provides a reward
or has control of a reward signal,
2. Scenario Presentation: the teacher configures
sub-problems of the domain that the agent can
train on to eventually learn a policy to the larger
problem, and
3. Action Advice: the teacher provides advice to the
agent by giving the correct action in important
states, which enables the agent to find the high
reward areas of the domain faster than traditional
exploration.
In prior work, human teachers gave reward feedback
while computer agent teachers provided action ad-
vice and scenario presentations, however, the entire
space of types with both human and computer agent
teachers has not been fully explored. We believe that
human teachers are more suited to providing action
advice than other forms of assistance, especially if
they have no specialized expertise in either the prob-
lem domain or in machine learning (important for
both scenario presentation and reward feedback). We
think this because non-RL experts may accidentally
92
Burn, C., Crabbe, F. and Hwa, R.
Let’s Do the Time Warp Again: Human Action Assistance for Reinforcement Learning Agents.
DOI: 10.5220/0010258700920100
In Proceedings of the 13th International Conference on Agents and Artificial Intelligence (ICAART 2021) - Volume 1, pages 92-100
ISBN: 978-989-758-484-8
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

shape the agent’s model of the reward function in un-
intended ways. This may explain some of the difficul-
ties encountered by Thomaz and Breazal discussed in
section 2.1. We hypothesize that with a mechanism
for enabling humans to provide action advice, the ad-
vantages of computer teachers over human teachers
would disappear. Our goal is to show that human
teachers can provide action advice and help a learning
agent find a better policy at a faster rate while spend-
ing less total time advising when compared to com-
puter teachers and eliminate the redundancy of com-
puter teachers who have already developed a policy.
A major challenge for human teachers in offer-
ing action advice is that humans operate at a much
slower speed than their computer students, therefore
it is difficult to pin-point the crucial states that the stu-
dent needs action advice on. We address this by in-
troducing the Time Warp guidance interface, which
features a mechanism that allows the teacher to mon-
itor the student as it learns, then freeze training and
rewind time to the state that the teacher deems impor-
tant in order to provide action advice from the desired
state.
We tested Time Warp in an environment based on
the classic arcade game Frogger. Experimental re-
sults suggest that human teachers are as effective in
producing agents as the computer teachers. We see
this effectiveness measured by the time to produce
the policy and the performance of the agent. We also
discover that the more exploration the human teacher
provides while training eventually produces better-
performing agents, rather than teachers that simply
exploited the domain.
2 ASSISTED REINFORCEMENT
LEARNING
A typical RL agent attempts to learn a solution to a
task in a given environment through a trial-and-error
process. While standard RL methods can produce
well-performing agents, the training process may take
a long time to converge. This is especially observ-
able as the state space and the opportunities for ex-
plorations becomes large. Consequently, these meth-
ods may converge on policies that do not perform at
an optimum level within a given state space. Assisted
reinforcement learning helps to reduce wasteful ex-
ploration so that the trial-and-error process takes less
time and produces better agents.
2.1 Forms of Assistance
There are several different ways in which a teacher
might offer assistance to the training of an RL agent.
We categorize prior work on assisted reinforcement
learning into three main forms of assistance: reward
feedback, scenario presentation, and action advice,
highlighting the different types of challenges faced by
human and computer teachers under each category.
Reward Feedback. Perhaps the most direct way to
engage a learning agent is to change the reward it re-
ceives from the environment. This approach is par-
ticularly well suited to human intervention when the
environment does not offer any natural reward of its
own. A major challenge is addressing the credit as-
signment problem: with domains that move quickly
and have many states, human response times are not
fast enough to assign their intended feedback to the
correct state. Previous work, such as TAMER (Knox
and Stone, 2009; Knox and Stone, 2010; Knox and
Stone, 2012), addressed this by introducing a prob-
abilistic error buffer for human reaction time to cor-
rectly attribute the signal to the intended state. An-
other problem is that people prefer to guide than to
give feedback. In particular, (Thomaz and Breazeal,
2006) found that their human teachers tried to give
guidance through the reward signal, which ended up
confusing the agent.
Scenario Presentation. If the teacher has expertise
both in the problem domain and in how machines
learn, they can assist learning by presenting interest-
ing states to the agent to help it learn to solve im-
portant sub-problems of the overall state space. In a
previous work called Curriculum Learning (Narvekar
et al., 2016), a computer teacher agent produces sce-
narios for a student agent to learn and transfer their
knowledge to the larger domain. Their methods au-
tomatically develop scenarios while an agent is on
a specific training trajectory, rather than do it before
training begins. This form may be challenging for hu-
mans because knowledge of the underlying learning
mechanism is essential when presenting the scenar-
ios.
Action Advice. Another way to help an agent learn
faster is to help it pick better actions at “teachable mo-
ments.” This approach is challenging for both com-
puter agent teachers and human teachers, but for dif-
ferent reasons. Computer teachers need a way to limit
its influence so that the student does not just become
a replica of the teacher; human teachers need a way to
Let’s Do the Time Warp Again: Human Action Assistance for Reinforcement Learning Agents
93

intercept the learning agent before it makes its action
selection.
Prior work on computer teachers limits their inter-
actions with the students in a number of ways. First,
there is an overall budget that restricts how much ad-
vice the teacher can provide the student throughout
training (Torrey and Taylor, 2013). Second, some
form of teacher-student interactions only occur dur-
ing “important states,” where the definition of an “im-
portant” state is chosen by the system designers, and
could be modified if other definitions of importance
appear. Prior work primarily differ in how provide
the action advice in these “important states.” For ex-
ample, (Torrey and Taylor, 2013) proposed both Ad-
vise Important, where the computer teacher provides
an action whenever the student’s state is “important”,
and Mistake Correcting, which operates like Advise
Important but has the additional constraint that the ad-
vice is provided only if the student would have cho-
sen the wrong action. (Amir et al., 2016) expanded
on Torrey and Taylor’s work by creating a teaching
framework titled apprenticeship learning. In appren-
ticeship learning, the student will actually query the
teacher for advice when the student believes it is in an
important state. Then, the teacher checks if the state
is important (according to its model) and will provide
the action if it truly is in an important state. This
method performed similarly to the Torrey and Tay-
lor strategies, however it required significantly less
attention from the teacher, because as the student im-
proved at its task, it relied less on the teacher. Ideally,
once the student learned the proper action from the
teacher in the important states, it didn’t need to query
the teacher anymore.
There has not been a great deal of prior work
in which human teachers offer action advice, per-
haps due to the difficulty in supporting the human
teacher to provide timely action advice. One exam-
ple we found is the work of (Maclin and Shavlik,
1996), where circumvent the issue by asking the hu-
man teachers to predict critical states and their corre-
sponding correct actions ahead of time. In particular,
they used a customized scripting language to provide
the advice. The human, prior to training, would define
states that they believed was important in the script-
ing language and then provide the correct action. This
system worked well, but is difficult to scale to larger
domains and include humans with no prior program-
ming or RL experience.
3 TIME WARP HUMAN
GUIDANCE INTERFACE
While prior work showed that pre-trained computer
agents can successfully assist in training new agents,
there are valid reasons to prefer human teachers. First,
human teachers have a broader view of the problem
than computer teachers and can naturally switch be-
tween the ”big picture” and focusing on the specific
details. Second, there are situations when a computer
teacher is simply unavailable because there is no so-
lution from a standard RL approach.
1
3.1 Problem Formulation
We argue that human teachers may be best suited to
offering action advice instead of providing a rein-
forcement signal or presenting scenarios. While re-
ward feedback may be appropriate for tasks in which
the environment does not naturally provide rewards
on its own (Knox and Stone, 2012), as Thomaz found,
humans naturally want to provide guidance rather
than reward signal, resulting in a improperly shaped
signal. While not yet thoroughly expored, we suspect
that in order to craft highly useful scenarios, the hu-
man teacher must be experts in both the domain and
RL methods.
In this paper, we propose a framework that facil-
itates assisted RL with action advice from a human
teacher. This framework serves as a testbed that al-
lows us to address two questions:
1. Can an RL agent assisted by action advice from
human teachers produce a better performing pol-
icy than an RL agent with no assistance? Can our
student agents converge on a policy in less time?
2. How do human teachers compare to computer
teachers when both are giving action advice? For
example, would the human teacher need to teach
as often or as long as the computer teachers?
Inspired by the work of (Torrey and Taylor, 2013)
and (Amir et al., 2016), our framework imposes sim-
ilar constraints on our human teacher as their com-
puter teachers. We record two main statistics from our
learning agents. First, we record the total reward re-
ceived by an agent in an exploitation run to determine
the average episode reward for the agents at various
points in training. We also record a statistic Amir used
called cumulative attention to determine the amount
of advice the teacher provided in a given period of
time.
1
Since a policy must have already been developed to cre-
ate the computer teacher, creating a new student agent from
scratch is arguably unnecessary.
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
94

3.2 Time Warp
Similar to the credit assignment problem that arises
when a human has to provide the reward feedback,
a major challenge toward facilitating action advice
from human teachers is the need to address the differ-
ences in the perceived times granularity between the
human and the student agent. To this end, we have de-
veloped the Time Warp interface, which provides the
human teacher the ability to pause and reverse time
while observing the student’s learning progress.
The human teacher begins with a new untrained
agent. The agent follows a standard RL algorithm
and exploration function for action selection. In
this work, we used Q-learning, with ε-greedy explo-
ration. The underlying function approximation was
quadratic, taking the form:
Q(s, a) =
n
∑
i=0
n
∑
j=i
w
i, j
f
i
f
j
+
n
∑
k=0
w
k
f
k
, (1)
where where f
i
are the features described in section
4.1, w
i j
are the quadratic weights, and w
k
are the lin-
ear weights. For all experiments we paused train-
ing every 100 episodes to record the average episode
reward across 30 exploitation runs (where no explo-
ration steps were taken and no updates were made to
the Q-values).
While observing the agent under training, the hu-
man teacher decides whether and when to provide ad-
vice to the agent. This decision is based on the hu-
man’s own perception of what an ”important state”
is; the human teacher is not informed about the state
representation used by the computer agent.
To provide advice, the teacher activates a take-
control signal. The system immediately pauses train-
ing and waits for further human input. The human
could then cycle through the recently visited states
in reverse chronological order. Once the human pin-
points the situation in which they want to advise, they
would signal again, indicating that they will control
the agent from this point on. The agent’s world state
would be restored to that same point, including the
weights at that point in training. While the human
controls the agent, any action given by the human
would be used as the action input that updates the
agent’s weights according to the standard Q-learning
update rule:
w
k
← w
k
+ α(r + γmax
a
0
Q(s
0
, a
0
) − Q(s, a)) f
k
, (2)
for the linear weights and,
w
i, j
← w
k
+ α(r + γmax
a
0
Q(s
0
, a
0
) − Q(s, a)) f
i
f
j
, (3)
for the quadratic weights.
If the teacher provided no input actions, the agent
would take no action, or NOOP. The teacher continues
to control the agent until they either activate a give-
back-control signal or guide the agent to a terminal
state. If the human returned control, the agent would
continue training where the human left off, following
the default exploration function of the given RL algo-
rithm.
Time Warp also limits the amount of advice the
human is able to provide over the course of train-
ing. Both the advice budget (used also with the com-
puter teachers) and the time limit restrict the human
from falling simply into supervised learning or learn-
ing from demonstration. With Time Warp, we do not
want infinite human interaction, but rather assistance
during critical moments in training.
There are two important limitations on human
teachers that distinguish them from computer ones.
First, in real-time games, the possible action-rate is
much higher than a typical human response rate, es-
pecially when a scenario requires reflection. In these
cases, the learning agent might see multiple NOOPs
as actions while the game state evolves around it. The
ramification of this will be discussed below. Second,
the humans can only participate in the training for
comparatively brief stretches of time, as opposed to
running constantly for days, as could be done with the
computer agent. Whenever the teaching budget or the
real time limit expires, the training of the agent will
continue until convergence without a teacher present,
using the same RL algorithm and exploration function
that was used throughout human training that had no
teacher.
4 THE TIME WARP FROGGER
TESTBED
The testing domain that we selected to compare com-
puter verses human teachers was the classic video
game, Frogger. We chose it because decisions made
by the agent had more long-term consequences com-
pared to the other commonly used test domains, and it
has been used by others working on similar problems
(Griffith et al., 2013), (Subramanian et al., 2016). We
compare agents that received no assistance, those that
received action advice from computer teachers, and
those that received action advice from non-expert hu-
man teachers using Time Warp.
Different human teachers may vary, not only in
terms of their level of expertise at the domain and their
computational literacy, but also in terms of their style
of engagement with the learning agent. For example,
some teachers may prefer to give frequent short bursts
Let’s Do the Time Warp Again: Human Action Assistance for Reinforcement Learning Agents
95

Figure 1: Screenshot of Frogger with the various rows
of cars, river objects, and randomly appearing flies and
crocodiles in the home.
of advice micro-sessions while others might prefer to
give fewer but longer sessions. To normalize across as
much variability as possible, our experiment is carried
out over a pool of 49 human teachers. In Section 4.3,
we describe the measures we have taken to control for
the variability in human teachers.
4.1 Frogger
Frogger is an arcade game originally developed by
Konami in 1981. The goal of the game is to maneu-
ver a Frog from the bottom of the screen to one of
five homes at the top of the screen. To win the game,
the player must place a Frog in each of the five homes.
Between the starting location and the homes, the Frog
must first avoid being hit by a number of cars while
crossing a road and then cross a river by only hopping
on floating objects in the river. Each row of either cars
or river objects consists of varying number of objects
all with varying speeds. When the Frog encounters
the river section of the screen, it must not fall into the
river by hopping on either logs or turtles. Some of the
turtles will also dive, however for this work the diving
turtles were disabled. There is also a random chance
that a fly or crocodile will appear in the homes for a
short amount of time. Flies provide more points for
the Frog, while crocodiles kill the Frog. For this pa-
per, we did not provide any additional points for cap-
turing a fly in a home, but the agent would still die if
it entered a home with a crocodile. Figure 1 provides
a screenshot of Frogger.
With over 20 objects, 224 possible Frog loca-
tions, and five homes, the state space for Frogger
is very large. Thus, we designed a feature set in-
spired from the work by (Emigh et al., 2016). One
of their feature sets used a local view of the agent
along with the y-location of the agent. The feature
drew an imaginary 3x3 grid around the Frog, indi-
cating if there was an object in each square with a
1 or 0 value. The y-location was then normalized
in the range [0, 1]. We used two separate grids, one
for road object and of for river objects. We built
our Frogger implementation using an existing Frog-
ger game built in Python, pyFrogger, and integrated it
with the PyGame-Learning-Environment (padorange,
2013; Tasfi, 2016). A single life of the frog counted
as one episode. Five possible actions were: up, down,
left, right, and do nothing (NOOP). Unless blocked
by the border of the screen, all five actions are always
available.
4.2 Experimental Details
We used Q-Learning for the underlying RL algorithm
with ε-greedy exploration when the human was not
controlling the agent. The underlying algorithm used
pessimistic initialization of the weights (setting the
weights at 0 to start). Whenever the human was not
providing an explicit action on the arrow keys, the
system automatically selected the valid NOOP action
for the human teacher. This meant when the human
did nothing, the NOOP action was sent to the up-
date rule for Q-Learning and it counted against the
human’s budget. Additionally, we limited the amount
of states the human could reverse time. If the human
provided the action signal within 50 states of a recent
death, the human could reverse time up to 50 states
before the last death. If the signal was given outside
of 50 states from a death, the human could simply re-
verse time up to 50 states from the current state.
4.3 Human Teachers
For this study, we recruited 49 human teachers. All
are college students from a variety of backgrounds.
While some did have some knowledge of RL, most
did not. Everyone was given a brief introduction:
They were told that they would be observing an agent
that was learning how to win the game of Frogger and
that to learn this solution, it tried out many different
actions and received positive and negative signals. We
did not explain the reward structure of Frogger.
To match the computer teaching agents, we allot-
ted each teacher a budget of 5,000 units of action ad-
vice but also a total time limit of 10 minutes for their
advice session with their agent. Within this limit,
teachers has the freedom to choose how they guide
their agents: they can immediately take control of the
agent; they can observe and only jump in when they
see the agent making a mistake; they can opt to take
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
96
control multiple times; or they can have one continu-
ous advice session until they deplete their budget.
Once the students completed training (by initiat-
ing the end themselves, running out of budget, or run-
ning out of time), we spawned 30 separate trials of
standard Q-Learning with no advice to complete the
training, in order to comapare to the computer teacher
systems.
4.4 Baselines
We implemented three computer agent teaching
strategies using the best set of weights from the stan-
dard Q-Learning run as the teacher. We implemented
Torrey’s Advise Important and Mistake Correcting
strategies and Amir’s Ask Important-Correct Im-
portant strategy in Frogger.
For all systems, we used the experimentally de-
rived hyperparameters of α = 0.006, γ = 0.95, and
ε = 0.04. For the teaching parameters, Table 1 pro-
vides the best teaching parameters we found for each
strategy through our experiments.
Metrics. In addition to recording the average
episode reward for the computer teaching strate-
gies, we also tracked the cumulative attention of the
teacher, as developed by Amir This statistic measures
the average number of states in which the teacher was
asked to provide advice within a 100 episode window
(across the 30 separate trials of each strategy). Each
100 episode frame’s value was added to the previous
100 episode frame to track the statistic cumulatively.
We slightly modified this statistic to measure the ra-
tio of the number of states the teacher provided ad-
vice to the total number of states the agent observed.
This was to allow us to directly compare experiments
as some runs would observe more states in the 100
episode frames than others. We still tracked the ratio
cumulatively, thus at any point in the plot, the value is
the cumulative ratio of states the teacher provided ad-
vice in to the total number of states. If a plot flattens
out, that means the budget ran out for the agent and
no advice was provided after that particular episode.
5 EXPERIMENTAL RESULTS
As seen in figure 2, the human taught agents have
similar performance to the three computer taught
agents, and all four outperform the baseline average
Q-Learning agent both in terms of the overall reward
and the time taken to develop the policy.
Torrey’s and Amir’s strategies do scale well to
the more complex domain of Frogger. Specifically,
Table 1: Teaching hyperparamters used for each system
that we used to compare to our Time Warp human teach-
ing system. The hyperparameters used for standard Q-
Learning were kept constant throughout all systems (in-
cluding the No Assistance system). These hyperparameters
were: α = 0.006, γ = 0.95, and ε = 0.04.
Teaching System
Advice
Threshold
Budget
Advise Important 12.0 5000
Mistake Correcting 12.0 3000
Ask Important-
Correct Important
10.0 (stu-
dent), 12.0
(teacher)
5000
Time Warp N/A 5000
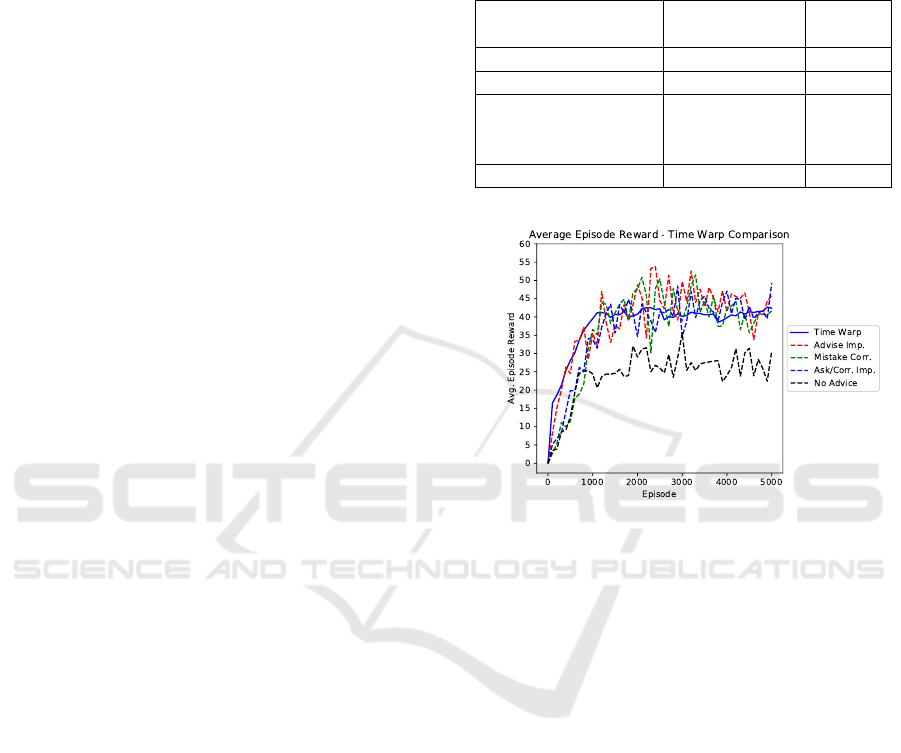
Figure 2: A comparison of the average episode reward for
Q-Learning (no assistance), the three computer agent teach-
ers, and Time Warp. As shown, Time Warp developed a
similar performing policy to the computer agents in roughly
the same amount of time. Regardless, all of the assistance
systems converged on a better policy in less time than the
no assistance agent converged policy.
Advise Important converged to an average episode
reward of 44.80, Mistake Correcting converged to
42.46, and Ask Important-Correct Important con-
verged to 41.78. Time Warp converged to 40.96 (av-
eraged across trials of 49 human teachers). In com-
parison, a Q-Learning agent alone achieves an aver-
age reward of 26.38.
Note that Time Warp’s curve has less variance
than the other curves. This is because we have more
data points for these curves. Each of the 49 human
teachers help to train an eventual 30 separate agents,
giving a total of 1,470 agents produced from Time
Warp. Conversely, the computer agent systems only
had 30 different agents to average.
Attention Level from Teachers. An ancillary goal
of teacher-based systems is to minimize the amount
of attention provided by the teachers during the teach-
ing process. Figure 3 compares the cumulative frac-
Let’s Do the Time Warp Again: Human Action Assistance for Reinforcement Learning Agents
97

Figure 3: A plot of the cumulative attention of the three
computer based teaching strategies and Time Warp. Agents
under Time Warp accumulated attention only within the first
100 episodes of training because most of the humans used
up their budget quickly. This equates to less than 10 minutes
of the teacher’s time. In contrast, computer teachers must
stay with the agents throughout the entirety of their training.
tional attention of the three computer guidance sys-
tems and Time Warp. While agents learning under
Time Warp received more cumulative attention than
Mistake Correcting and Ask Important-Correct
Important, the attention was concentrated in the be-
ginning of training, since the human teachers do not
stay with the learning agents throughout their full
training.
In general we find that this statistic does not truly
take into account how involved the teacher was in
training. For Time Warp, our human trainers pro-
vided advice for no more than 10 minutes of real
training time. The computer teaching systems require
the teacher to be present for the entirety of training.
Therefore, the computer teaching systems require the
teacher to provide much more attention in terms of
total time spent observing the agent training. While
they may not provide advice in as many states (and as
quickly) as the Time Warp system, they do need to be
present for the entire training phase of the agent. For
our purposes, this is a best case scenario for a human
teaching system. Humans do not have the patience to
watch an agent converge on a policy, so the interac-
tion must be done in the short time span that the hu-
man can fully concentrate. This also means that the
advice the human provides in this short time frame is
meaningful and insightful to the agent.
5.1 Discussions
A number of interesting questions arose in the context
of providing human action advice. Does the amount
of time the human teacher spent training their agent
affect the overall performance of the agent? How
is the student learning affected by the quality of the
Figure 4: A comparison of agents trained by humans who
used up their advice budget early and those trained by hu-
mans whose finished advising later. The final difference is
not statistically significant.
teachers? Does the student agent perform better im-
mediately following the human advice session than
after further self-training? To begin to answer these
questions, we analyzed our collected data to look for
differences between different groups of teachers.
First, we investigated whether the amount of time
the human spent training affected the performance of
the agent. We wanted to see if human teachers that left
training late performed better than the human teach-
ers that left training early. We separated early and late
trainers based on the average stopping point (episode
96). If a teacher quit training before episode 96, they
were labeled an early trainer and trainers that quit af-
ter episode 96 were labeled late trainers. We then av-
eraged across these two groups to produce the plot in
Figure 4. Counter to our intuition, the difference be-
tween these two groups was not significant (the early
trainers had a higher average of 41.89, while the late
trainers had an average of 39.98).
Second, we explored the difference between
“good” and “bad” teachers. We defined ”good” teach-
ers as those with the better performing agents the end
of human training. Since they were able to help their
agents improve quickly, they might have had some
good advising strategies. We wanted to see whether
these students of ”good” teachers would continue to
outperform their peers as they learn on their own.
To make the group assignments, we ran 30 ex-
ploitation runs with the weights developed by the
agent at the end of human training to compute the
average reward for the population. We consider any
agent with a reward greater than the average (11.70)
as having had a ”good” teacher; analogously, the other
agents are said to have had a ”bad” teacher. Figure 5
shows the reward averages for the two groups as the
agents continue to train on their own.
Counter to our expectation, the agents learning
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
98

Figure 5: A comparison of agents trained by ”good” and
”bad” teachers (defined by agent performance at the end of
human advising sessions). As the agents continued training
on their own, the ”bad” students’ performance overtook the
”good” students.
from “bad” teachers had a better overall final aver-
age (42.22) than those learning from “good” teachers
(39.27). The difference is statistically different with
p = 0.006. A possible explanation is that the ”bad”
teachers might have encouraged more exploration of
the entire space than exploiting the reward structure of
Frogger. Once the standard Q-Learning with ε-greedy
exploration algorithm took over, the agents focused
more on reinforcing the weights that led to high re-
ward, and eventually learned a better policy.
6 FUTURE WORK
There are many areas of potential future work to
pursue, three direct extensions, and one alternative
method. First, we would like to determine the effects
of varying the expertise of the agent when the human
teacher enters training. Does a human teacher add
more benefit to a completely untrained agent, or to an
agent that has some knowledge of the space?
Second, we would like to investigate the differ-
ence between small and large training budgets (both
in actual time to train or number of advised actions).
Third, we would like to determine the extent of the
impact of variations in the expertise of the teacher. In
particular, looking at both experts in terms of playing
Frogger verses players new to the game, and experts
in RL, verses those unaware of how it works.
Finally, we are developing a mechanism for allow-
ing a human trainer to develop interesting problems
for the agent to learn how to solve (scenario presenta-
tion). We expect human trainers will be able to pro-
vide meaningful scenarios that can be more beneficial
that automatically generated scenarios.
7 CONCLUSION
This work showed that it is possible to integrated a
human teacher into the training of an RL agent by
providing a leveling platform to accommodate a hu-
man’s slower response time and potentially different
mental model of the state space. The Time Warp
guidance interface that we developed can facilitate the
interaction between a human teacher and a learning
RL agent by giving the human teacher the ability to
reverse time to an important state where the human
could then provide a sequence of actions for the agent
to take. This mechanism addresses the credit assign-
ment problem and allowed the human to direct the ex-
ploration and guide the agent toward the areas in the
state space of high reward in order to converge on a
better-performing policy faster.
Validated by experiments on the Frogger test do-
main, we compared human action advising via Time
Warp with different baselines. Our results show that:
• Time Warp converged on a better performing pol-
icy in less time than a Q-Learning agent with no
assistance
• Time Warp converged on a similar performing
policy in similar time as compared to the com-
puter agent teaching strategies
• While the human teachers provided more advice
(as measured by cumulative attention) than the
computer teachers, the human teachers interacted
with their agents for no more than 10 minutes,
whereas the computer systems required a teacher
present throughout the entirety of training
• How long the human trainers spent with their
agents did not significantly change the policy of
their agent, but the teachers that produced worse
performing agents at the conclusion of human
training had a significantly better policy after fin-
ishing training with a standard RL algorithm most
likely due to increased exploration of the space
We conclude that, with some appropriate mediation,
humans can be effective teachers for learning agents.
Humans are skilled at knowing the right action in spe-
cific states (in terms of immediate reward) as well as
the ability to keep the larger picture in mind, essen-
tial to proper planning within a complex environment.
Humans are able to determine the future expected re-
ward in an environment quicker (and without as much
random exploration) than a computer agent. With this
ability, a human can better direct and guide an agent
toward the development of a policy and properly di-
rect the right exploration through the space.
Let’s Do the Time Warp Again: Human Action Assistance for Reinforcement Learning Agents
99

REFERENCES
Amir, O., Kamar, E., Kolobov, A., and Grosz, B. (2016). In-
teractive teaching strategies for agent training. In In-
ternational Joint Conference on Artificial Intelligence,
New York City, USA.
Emigh, M., Kriminger, E., Brockmeier, A., Pr
´
ıncipe, J., and
Pardalos, P. (2016). Reinforcement learning in video
games using nearest neighbor interpolation and metric
learning. IEEE Transactions on Computational Intel-
ligence and AI in Games, 8:56–66.
Griffith, S., Subramanian, K., Scholz, J., Isbell, C. L., and
Thomaz, A. L. (2013). Policy shaping: Integrat-
ing human feedback with reinforcement learning. In
Advances in neural information processing systems,
pages 2625–2633.
Knox, W. B. and Stone, P. (2009). Interactively shap-
ing agents via human reinforcement: The TAMER
framework. In The Fifth International Conference on
Knowledge Capture.
Knox, W. B. and Stone, P. (2010). Combining manual
feedback with subsequent MDP reward signals for re-
inforcement learning. In Proc. of 9th Int. Conf. on
Autonomous Agents and Multiagent Systems (AAMAS
2010).
Knox, W. B. and Stone, P. (2012). Reinforcement learning
from simultaneous human and MDP reward. In Pro-
ceedings of the 11th International Conference on Au-
tonomous Agents and Multiagent Systems (AAMAS).
Maclin, R. and Shavlik, J. W. (1996). Creating advice-
taking reinforcement learners. Machine Learning,
22(1):251–281.
Narvekar, S., Sinapov, J., Leonetti, M., and Stone, P. (2016).
Source task creation for curriculum learning. In Pro-
ceedings of the 15th International Conference on Au-
tonomous Agents and Multiagent Systems (AAMAS
2016), Singapore.
padorange (2013). pyfrogger. https://sourceforge.net/
projects/pyfrogger/, accessed November, 2020. Also
available at https://www.usna.edu/Users/cs/crabbe/
pyFrogger0.1.zip.
Subramanian, K., Isbell Jr, C. L., and Thomaz, A. L. (2016).
Exploration from demonstration for interactive rein-
forcement learning. In Aamas, pages 447–456.
Sutton, R. S. and Barto, A. G. (1998). Reinforcement Learn-
ing: An Introduction. MIT Press, Cambridge, MA,
USA, 1st edition.
Tasfi, N. (2016). Pygame learning environment. https:
//github.com/ntasfi/PyGame-Learning-Environment,
accessed November, 2020. Also avail-
able at https://github.com/profcrabbe/
PyGame-Learning-Environment.
Thomaz, A. L. and Breazeal, C. (2006). Reinforcement
learning with human teachers: Evidence of feedback
and guidance with implications for learning perfor-
mance. In Proceedings of the 21st National Confer-
ence on Artificial Intelligence - Volume 1, AAAI’06,
pages 1000–1005. AAAI Press.
Torrey, L. and Taylor, M. (2013). Teaching on a budget:
Agents advising agents in reinforcement learning. In
Proceedings of the 2013 International Conference on
Autonomous Agents and Multi-agent Systems, pages
1053–1060.
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
100
