
Mixed Reference Interpretation in Multi-turn Conversation
Nanase Otake, Shoya Matsumori, Yosuke Fukuchi, Yusuke Takimoto and Michita Imai
Faculty of Science and Technology, Keio University, Japan
Keywords:
Conversation Context, Demonstrative Word Interpretation, Contextual Reference, Situational Reference,
Mixed Reference Interpretation.
Abstract:
Contextual reference refers to the mention of matters or topics that appear in the conversation, and situational
reference to the mention of objects or events that exist around the conversation participants. In conventional
utterance processing, the system deals with either contextual or situational reference in a dialogue. However, in
order to achieve meaningful communication between people and the system in the real world, the system needs
to consider Mixed Reference Interpretation (MRI) problem, that is, handling both types of reference in an
integrated manner. In this paper, we propose DICONS, a method that sequentially estimates an interpretation
of utterances from interpretation candidates derived from both contextual reference and situational reference
in a dialogue. In an experiment in which DICONS handled this task with both contextual and situational
references, we found that it could properly judge which type of reference had occurred. We also found that
the referent of the demonstrative word in each context and situation could be properly estimated.
1 INTRODUCTION
In human conversation, both contextual reference and
situational reference are intermingled. Contextual ref-
erence is to refer matters or topics that has mentioned
in the conversation. Situational reference, on the other
hand, is to mention objects or events that exist around
the conversation participants. These two types of ref-
erence are illustrated in Fig. 1, which shows exam-
ple scenarios in which a person and a robot are shop-
ping at a supermarket. In the scene on the left, where
the person asks “Which one is better for dinner, fish
or meat?” and the robot answers “Fish”, contextual
reference occurs because the robot selects the word
“fish” as the answer to the question based on the con-
tent of the human utterance. In the scene on the right,
where fish and meat are displayed on the shelf and
the person standing in front of it asks “Which one is
better?” and the robot answers “Fish”, situational ref-
erence occurs because the robot answers the question
based on the information about objects in the envi-
ronment. As shown in this example, in real-world di-
alogue, both contextual reference and situational ref-
erence may occur in the same situation.
A common problem with previous methods is that
they deal with either contextual or situational refer-
ence in dialogue, not both. In other words, the system
is designed assuming a situation where only context
reference occurs, as represented by a chatbot, or only
Figure 1: Example of contextual reference and situational
reference. We call the task in which speakers need to deal
with both references Mixed Reference Interpretation (MRI).
situational reference, as represented by an instruction
task to the robot. However, in order to deal with more
realistic situations in the real world, a system needs
to handle the Mixed Reference Interpretation (MRI)
problem, that is, both types of reference coexist, and
we cannot determine in advance which one will occur.
Another problem is that previous methods do not deal
with the “sequentiality of dialogue”, where the con-
text gradually develops according to the utterance of
each speaker. In order to enable a dialog system and a
person to dynamically understand each other’s utter-
Otake, N., Matsumori, S., Fukuchi, Y., Takimoto, Y. and Imai, M.
Mixed Reference Interpretation in Multi-turn Conversation.
DOI: 10.5220/0010260103210328
In Proceedings of the 13th International Conference on Agents and Artificial Intelligence (ICAART 2021) - Volume 1, pages 321-328
ISBN: 978-989-758-484-8
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
321

ances, it is necessary, in ambiguous states in which
contextual reference or situational reference occur,
to decide which one it is by estimating sequentially
which reference the current utterance corresponds to.
In this paper, we focus on the MRI problem in
multi-turn conversation processing. We propose Dy-
namic and Incremental Interpretation of Contextual
and Situational References in Conversational Dia-
logues (DICONS), a method that sequentially esti-
mates an interpretation of utterances from interpreta-
tion candidates derived from contextual reference and
situational reference in a dialogue. DICONS simulta-
neously performs a probabilistic search of interpreta-
tion candidates considering the contextual reference
and considering the situational reference in a multi-
turn conversation, compares each interpretation, and
then estimates which type of reference it is. In this
way, even in a conversation where the reference type
is not clear, DICONS can estimate the reference type
and the referent.
This paper is structured as follows. In Chapter 2,
we provide an overview of previous works on contex-
tual and situational references and describe SCAIN
(Takimoto et al., 2020), which is the base algorithm
of DICONS. Chapter 3 presents DICONS in detail.
In Chapter 4, we explain the experiments conducted
in this study and report the results. Chapter 5 de-
scribes the future directions of DICONS. We con-
clude in Chapter 6 with a brief summary.
2 RELATED WORK
2.1 Contextual Reference
In the field of natural language processing, corefer-
ence resolution is one of the tasks that deal with con-
textual reference. This task is the process of esti-
mating the target of pronouns or demonstratives and
complementing a zero pronoun, which is the omitted
noun phrase. There are two basic methods to deal
with coreference resolution: a rule-based method that
extracts coreference relations based on the heuristic
rules (Lee et al., 2011), and a method that uses ma-
chine learning (Clark et al., 2019; Joshi et al., 2019;
Lee et al., 2018; Joshi et al., 2020).
The major problem with previous methods is that
they do not consider situational reference. That is,
they cannot handle a case in which the object that a
pronoun refers to exists in visual information. Fur-
thermore, whole sentences are required to resolve
coreferences, and the sequentiality of dialogue is not
considered. As stated earlier, the term “sequentiality
of dialogue” refers to how the context gradually de-
velops according to the utterance of each speaker. In
order for the system to understand the utterance and
generate a reply in a multi-turn conversation, it needs
to dynamically consider possible reference candidates
from the history of dialogue. Estimating the reference
candidate will inevitably involve uncertainty. Further-
more, a person might make an additional utterance
after the estimation has started, which is also an im-
portant hint for estimating the reference candidates,
so the system has to continuously look back on the
dialogue and reinterpret the reference candidate to re-
duce the uncertainty. In order to achieve meaningful
communication between people and a system in the
real world, it is necessary for the system to be able to
consider the sequentiality of dialogue.
2.2 Situational Reference
A referring expression (RE) is any noun phrase, or
surrogate for a noun phrase, whose function in dis-
course is to identify some individual object. In hu-
man conversations, humans interpret referring expres-
sions using language, gesture, and context, fusing in-
formation from multiple modalities over time. Inter-
preting Multimodal Referring Expressions (Whitney
et al., 2016) and Interactive Picking System (Hatori
et al., 2018) deal with the RE problem, which is a
task to identify objects in an image that correspond to
ambiguous instructions.
Visual dialog (VisDial) (Das et al., 2017) is a task
which requires a dialog agent to answer a series of
questions grounded in an image. Attention-based ap-
proaches were primarily proposed to address these
challenges, including Dual Attention Networks (Kang
et al., 2019) and Light-weight Transformer for Many
Inputs (Nguyen et al., 2020). VisDial dataset is a stan-
dard dataset for evaluating methods dealing with vi-
sual dialog. This dataset has two components: image
and dialogue history about the image. A dialogue his-
tory is a set of successive question-answer pairs.
This paper focuses on more realistic dialogues
than previous works. The setting in RE problem as-
sumes that the referent must exist in the given im-
age. In other words, the setting considers only situa-
tional references and excludes contextual references.
VisDial dataset has also several disadvantages. First,
the dialogue history consists of only questions about
an image and answers for them, but realistic dia-
logue does not necessarily consist of such question-
answering pairs. For example, one may give his/her
thoughts about surrounding objects or opinions on
others’ utterance, so it is not natural to ask questions
only. Second, all the questions in a dialogue history
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
322

Figure 2: Flow chart of DICONS.
are about the things in a corresponding image. This
means that no contextual references are taken into ac-
count. In a realistic situation, the situation where ei-
ther contextual reference or situational reference oc-
curs is limited. Since it is usually unknown which
reference will occur, it is desirable that one system
can handle both references.
Therefore, this paper deals with situations that
include both contextual and situational references,
which are closer to realistic situations. Since there
was no dataset to deal with this setup, we prepared a
few samples to evaluate our system on a trial basis.
2.3 SCAIN
SCAIN (Takimoto et al., 2020) is an algorithm that
dynamically estimates the context and interpretations
of words in a conversation. SCAIN achieves paral-
lel context estimation while being able to obtain new
information throughout the sequential input of a con-
versation text. As such, SCAIN can deal with the se-
quentiality of dialogue in dynamic resolution of coref-
erence.
SCAIN evolved from FastSLAM (Montemerlo
et al., 2002), an algorithm for a mobile robot that
statistically resolves the interdependence between the
robot’s self-position and a map. SCAIN replaces self-
position with a context and the map with a word inter-
pretation space to apply FastSLAM to the interdepen-
dence between context and interpretation in a multi-
turn conversation. The Kalman filter and a particle
filter are the key mechanisms brought over from Fast-
SLAM.
In SCAIN, the following processes are performed
to sequentially interpret a dialogue and estimate the
context. The correspondences between the SLAM
and SCAIN variables are listed in Table 1.
SCAIN consists of 3 steps. First is update self-
position, second is update landmark points, and third
is resampling of particles. In step 1, SCAIN applies
Table 1: Correspondence of random variables between con-
ventional SLAM and SCAIN.
Random variable Conventional SLAM SCAIN
x Self-position Context
m Environment map Interpretation domain
u Control Own utterance
z Observation Other’s utterance
the interpreter’s own utterance u to the context x in
each particle. In step 2, SCAIN interprets the other’s
utterance z on the interpretation domain m and up-
dates m. In step 3, SCAIN reflects the relationship
between z and x. Then, SCAIN leaves valid interpre-
tations by resampling the particles.
3 DICONS
We propose Dynamic and Incremental Interpretation
of Contextual and Situational References in Conver-
sational Dialogues (DICONS) as a method for dy-
namically estimating context and word interpretation
in a multi-turn conversation, considering both contex-
tual information and visual information. With DI-
CONS, it is possible to sequentially solve the MRI
problem; it can determine whether the reference type
in the dialogue is a contextual reference or a situa-
tional reference and estimate the referent of a demon-
strative word.
At the timing when the demonstrative word ap-
pears in the conversation, DICONS starts to inter-
pret the demonstrative word based on visual and con-
textual information. DICONS handles two types of
particle: one for contextual reference and the other
for situational reference, where both types of parti-
cle can handle conversational sentences sequentially.
The difference between the two is that particles for
contextual reference handle only utterance informa-
tion whereas particles for situational reference handle
both utterance information and images showing visual
Mixed Reference Interpretation in Multi-turn Conversation
323

information of the space in which the conversation is
occurring. The input image is used to obtain the can-
didates of a demonstrative word.
Candidates of a demonstrative word include two
types: one that can be obtained from a conversation
history Y
text
= {y
1(text)
, y
2(text)
, ...} and one that can
be obtained from an image Y
image
= {y
1(image)
,
y
2(image)
, ...}. Here, each element of Y
text
and Y
image
is a distributed representation (Mikolov et al., 2013)
of each interpretation candidate. The particles for
contextual reference treat the words extracted from
the past conversation history as the interpretation can-
didates. The candidates from situational reference are
assumed to appear in the input image, and multiple
labels extracted by object detection (Redmon et al.,
2016) are treated as the candidates from the situa-
tional reference.
In a conversational sentence, the utterances after
the appearance of the demonstrative word are input to
each particle as the other’s utterance. Following the
steps 1–3 of SCAIN, the context and the distributed
representations of the words, which are included in
the interpretation domain, are updated. In detail, the
update method of context is different from SCAIN.
In step 1 of SCAIN, the number of particles is in-
creased by randomly dividing the context of one par-
ticle into multiple directions, and it achieves an effi-
cient context search in the distributed representation
space. The update expression for the context x
k·n+i
t+1
in
the k-th particle at time t is represented, for i in the
range from 1 to n of Y, as
x
k·n+i
t+1
= (1 − λ
u
)x
k
t
+ λ
u
v
ut
+ σ
i
, (1)
where n is the number of interpretation candidates in
Y, Y = (y
1
, . . . , y
i
, . . . , y
n
), Y = (Y
text
or Y
image
),
λ
u
is a hyper-parameter, σ
i
is random Gaussian noise,
and v
u
is the weighted average of the distributed rep-
resentation of the words composing the utterance u.
However, in DICONS, the number of particles is
increased by dividing the context into the directions of
the distributed representations of the candidates han-
dled by the particles. This is represented as
x
k·n+i
t+1
= (1 − λ
u
)x
k
t
+ λ
u
v
ut
+ αy
i
, (2)
where α is a hyper-parameter.
We do this so as to achieve a more efficient search
in the distributed representation space than the ran-
dom method can by assuming that the context is
related to the candidates, as the candidates of the
demonstrative word are limited in the task of estimat-
ing the referent. Then, as a result of the resampling
in step 3 of SCAIN, the weight of each particle w
k
is calculated based on the context and the interpreta-
tion domain, and the particle with the largest weight
is selected as the optimum interpretation. The system
can judge whether the contextual information or the
visual information is dominant based on whether the
best particle is derived from the context or the situa-
tion.
Next, the system decides the referent of the
demonstrative word. This is done by comparing the
cosine similarity between the target T GT of the best
particle obtained by resampling and each candidate,
and the candidate E with the maximum cosine sim-
ilarity is selected as the referent. Here, T GT is the
tracker of the possible interpretation candidates of a
demonstrative word included in interpretation domain
m. The above process can be represented by Eq. 3 be-
low.
E = argmax
y
i
∈{Y
text
or Y
image
}
{cosine similarity(y
i
, TGT)}
(3)
Note that cosine similarity(x, y) =
x
|x|
·
y
|y|
, where x, y
are vectors.
4 CASE STUDY
4.1 Evaluation Method
To evaluate whether the proposed DICONS can solve
the MRI problem in a sequential way, we conducted a
case study of estimating the referent of demonstrative
words. The purpose of the experiment is to consider
whether it is possible to 1) determine the reference
type of the demonstrative word and 2) estimate the
referent.
In this experiment, two types of conversation exam-
ples with different difficulties were designed. Con-
versation example 1 is (Tables 2 and 3) an example in
which the candidates for contextual reference and the
candidates for situational reference are quite different
such as fruits and birds. Conversation example 2 (Ta-
bles 6 and 7) is an example in which the candidates
for contextual reference and the candidates for situa-
tional reference are similar such as fruits and fruits, so
it is assumed to be more difficult to distinguish than
conversation example 1.
Conversation examples are dialogues between two
speakers: “A” and “B”. Here, “A” plays a role of pro-
moting the utterance, while “B” provides information
useful for estimating the referent. In our case study,
our system observes the utterances of “B” and esti-
mates the referent. Interpretation candidates and the
correct referent of a demonstrative word are shown in
Tables 4 and 5 for conversation example 1 and Ta-
bles 8 and 9 for conversation example 2. The demon-
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
324
Table 2: Conversation example 1.1. The ground truth of the
demonstrative word is as follows. Reference type: Contex-
tual. Referent: Mango.
Speaker Utterance content
A
“Bananas and pineapples are grown
here. This is the first time
I’ve actually seen any of them.
Oh, mangoes are eaten by birds.
I like mangoes.”
B
“I like them, too.”
(∗timing to get interpretation
candidates)
A
“Really?”
B (input tx1a)
“They are sweet and delicious,
aren’t they?”
A
“Yes, they are.”
B (input tx2a)
“There are various desserts made
from them. I like eating them
as jelly.”
Table 3: Conversation example 1.2. The ground truth of the
demonstrative word is as follows. Reference type: Situa-
tional. Referent: Crow.
Speaker Utterance content
A
“Bananas, pineapples, and
mangoes are grown here.
This is the first time I’ve
actually seen any of them.”
B
“This botanical garden also has
many kinds of birds.
There are birds everywhere.”
A
“I like that bird.”
(∗timing to get interpretation
candidates)
B (input vis1a)
“Are you talking about the black
one?”
A
“Yes.”
B (input vis2a)
“Well, I think it’s cool in shape
and color, but I don’t like it
because it digs in the trash
in the city.”
strative words in the conversation examples are inter-
preted following the algorithm in Sec. 3.
4.2 Conversation Example 1:
Easy-to-Identify Examples
4.2.1 Evaluation Results
In each conversation example, the change in cosine
similarity between the target and each interpretation
candidate in the best particle and the change of ref-
erence type of the best particle are shown in Tables
4 and 5. Input tx1a, tx2a in Table 4 and input vis1a,
vis2a in Table 5 correspond to the sentences shown in
the Tables 2 and 3. The cosine similarity in Tables 4
Table 4: Cosine similarity between each candidate and tar-
get of best particle (excluding initial position) and estima-
tion result in conversation example 1.1. ∗ indicates the
ground truth.
Candidates / Input Initial position input tx1a input tx2a
Cosine similarity of contextual candidates
mango∗ 0.5000 0.9973 0.9722
banana 0.5000 0.7082 0.8478
pineapple 0.5000 0.8583 0.8439
Cosine similarity of situational candidates
crow 0.5000 – –
pigeon 0.5000 – –
sparrow 0.5000 – –
Estimation result
Reference type – contextual contextual
Estimation – mango mango
Table 5: Cosine similarity between each candidate and tar-
get of best particle (excluding initial position) and estima-
tion result in conversation example 1.2. ∗ indicates the
ground truth.
Candidates / Input Initial position input vis1a input vis2a
Cosine similarity of contextual candidates
mango 0.5000 – –
banana 0.5000 – –
pineapple 0.5000 – –
Cosine similarity of situational candidates
crow∗ 0.5000 0.9771 0.9256
pigeon 0.5000 0.4601 0.4334
sparrow 0.5000 0.4112 0.7026
Estimation result
Reference type – situational situational
Estimation – crow crow
and 5 refers to the initial position and the best particle
calculated after each input. Here, regarding the ini-
tial position, since there is no difference in the weight
between particles when there is no input, the confi-
dence is the same for all interpretation candidates.
The cosine similarity is regarded as equal to the confi-
dence, and 0.5 is set as the initial position value. Note
that 0.5 indicates the ambiguous state where it is un-
known if each interpretation candidate is a referent or
not. The best particle is one particle with the highest
weight. Cosine similarities were calculated for either
contextual or situational interpretation candidates be-
cause one particle considers only either ones. There-
fore, there are some empty spaces (–) in Tables 4 and
5.
In addition, in each conversation example, in order
to analyze whether the reference types are correctly
distinguished, we visualized the ratio of the reference
types in the top-30 particles, which is 10% of the total
number of particles, and the distribution of the parti-
cle weights. The change in the ratio of the reference
type (context or image) in the top-30 particles in de-
scending order of weight is shown in Figs. 3 and 4.
The change in the distribution of particle weights is
Mixed Reference Interpretation in Multi-turn Conversation
325

Figure 3: Change in ratio of reference type in top-30 parti-
cles in conversation example 1.1. No particles derive from
the situational reference in the top-30 particles.
Figure 4: Change in ratio of reference type in top-30 parti-
cles in conversation example 1.2. No particles derive from
the contextual reference in the top-30 particles.
shown in Figs. 5 and 6.
4.2.2 Discussion
In conversation example 1.1, the column of input tx2a
in Table 4 has the highest cosine similarity. In con-
versation example 1.2, the column of input vis2a in
Table 5 has the highest cosine similarity. Therefore,
the DICONS estimation of conversation example 1.1
is “mango”, which comes from the context, and in
conversation example 1.2 it is “crow”, which comes
from the input image. In both cases, the referent of
the demonstrative word was correctly obtained.
From Figs. 3 and 4, there are only particles with
the correct reference type in the top-30 particles. In
both conversation examples, from Figs. 5 and 6, the
weight distributions of the particles were clearly sep-
arated by the reference type in the progress of the di-
alogue. Therefore, our system can clearly distinguish
the reference types.
4.3 Conversation Example 2:
Difficult-to-Identify Examples
4.3.1 Evaluation Results
In each conversation example, the change in cosine
similarity between the target and each interpretation
candidate in the best particle and the change of refer-
ence type of the best particle are shown in Tables 8
and 9. Input tx1b, tx2b in Table 8 and input vis1b,
vis2b in Table 9 correspond to the sentences shown in
the Tables 6 and 7.
Figure 5: Change in distribution of particle weights in con-
versation example 1.1. The vertical line shows the fre-
quency (that is, the number of particles per weight) and the
horizontal one the weight of particles.
Figure 6: Change in distribution of particle weights in con-
versation example 1.2.
In addition, in each conversation example, the change
in the ratio of the reference type (context or image) in
the top-30 particles in descending order of weight is
shown in Figs. 7 and 8. The change in the distribution
of particle weights is shown in Figs. 9 and 10.
4.3.2 Discussion
The DICONS estimation of conversation example 2.1
is “lemon”, which comes from the context, and in
conversation example 2.2 it is “banana”, which comes
from the input image. In both cases, the referent of the
demonstrative word was correctly obtained.
From Figs. 7 and 8, the correct reference type be-
come dominant due to the sequential update. In the
conversation example 2.1, from Fig. 9, the weight
distribution of the situational reference particles is
smaller and that of the contextual reference parti-
cles is larger in the progress of the dialogue from
input tx1b to input tx2b. In the conversation exam-
ple 2.2, from Fig. 10, the weight distribution of the
contextual reference particles moves toward a small
direction in the progress of the dialogue from in-
put vis1b to input vis2b. Therefore, the estimation
correctly changes even when focusing on all particles.
5 FUTURE WORK
This paper has some future works. For example, use
of other visual information contained in the image
added to the labels, evaluation on dataset or interac-
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
326
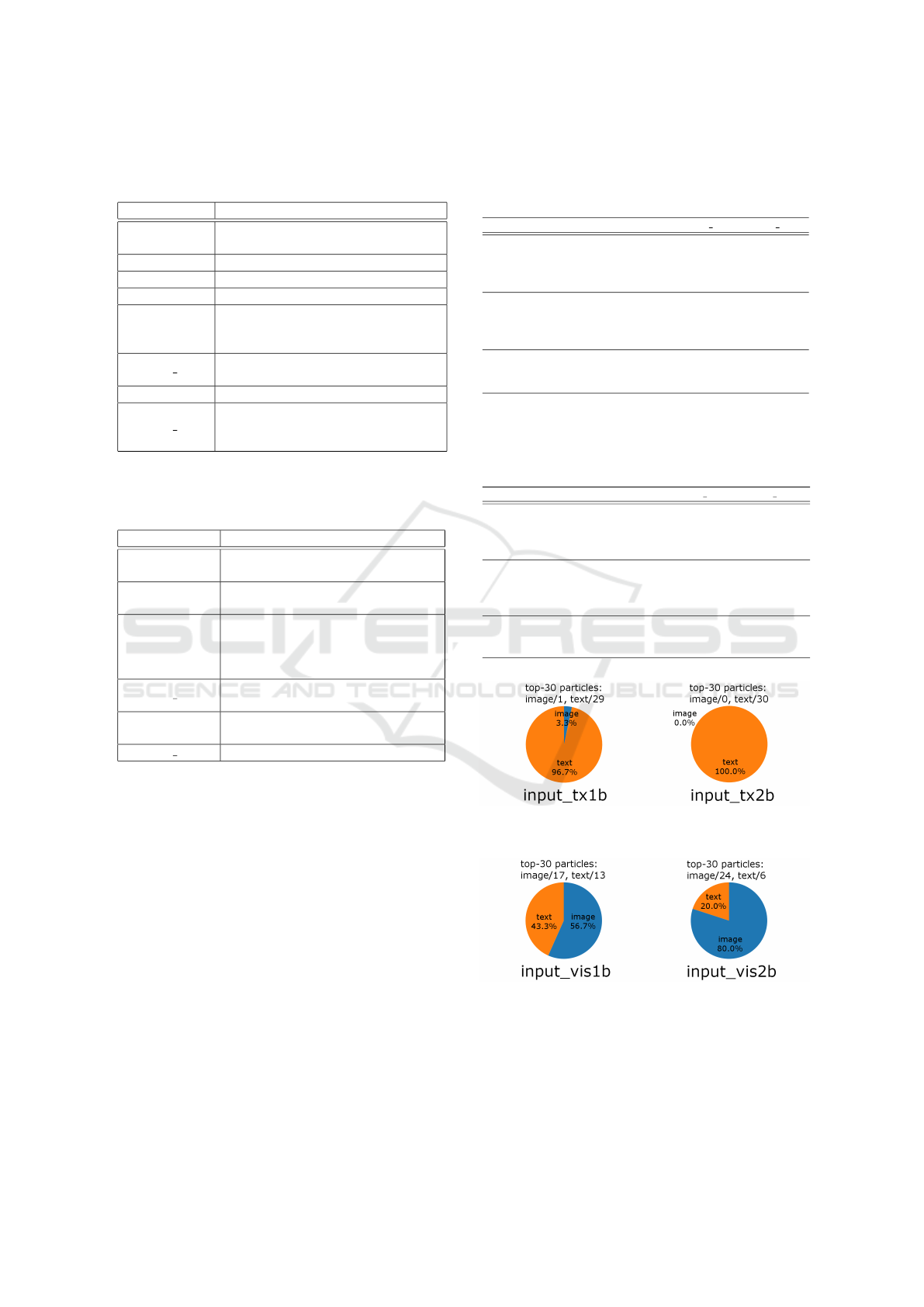
Table 6: Conversation example 2.1. The ground truth of the
demonstrative word is as follows. Reference type: Contex-
tual. Referent: Lemon.
Speaker Utterance content
A
“I have a cold. Do you know any
fruit that is good for colds?”
B
“How about kiwi or pineapple?”
A
“Well, anything else?”
B
“How about lemon?”
A
“Oh, it is certainly effective.”
(∗timing to get interpretation
candidates)
B (input tx1b)
“Yeah, it is rich in vitamin C and
citric acid, so I think it is effective.”
A
“OK, I must buy it.”
B (input tx2b)
“Yeah, but, It is sour and hard to
eat, so I recommend eating it
with other foods.”
Table 7: Conversation example 2.2. The ground truth of the
demonstrative word is as follows. Reference type: Situa-
tional. Referent: Banana.
Speaker Utterance content
A
“I have a cold. Do you know any
fruit that is good for colds?”
B
“How about lemon, kiwi, or
pineapple?”
A
“Good. What do you think of
that fruit?”
(∗timing to get interpretation
candidates)
B (input vis1b)
“It has a lot of sugar and changes
quickly to energy.”
A
“So, do you think it is effective
for colds?”
B (input vis2b)
“Yes. Better with bread or cereal.”
tion experiments with humans, and the well-designed
method to obtain the contextual reference candidates.
6 CONCLUSIONS
The biggest problem with previous methods for
demonstrative word interpretation is that they cannot
deal with MRI problem. Our experimental results
demonstrate that DICONS can handle the task with
MRI problem in a multi-turn conversation.
ACKNOWLEDGEMENTS
This work was supported by JST CREST Grant Num-
ber JPMJCR19A1, Japan.
Table 8: Cosine similarity between each candidate and tar-
get of best particle (excluding initial position) and estima-
tion result in conversation example 2.1. ∗ indicates the
ground truth.
Candidates / Input Initial position input tx1b input tx2b
Cosine similarity of contextual candidates
lemon∗ 0.5000 0.9931 0.9559
kiwi 0.5000 0.4078 0.6015
pineapple 0.5000 0.6717 0.6891
Cosine similarity of situational candidates
banana 0.5000 – –
apple 0.5000 – –
orange 0.5000 – –
Estimation result
Reference type – contextual contextual
Estimation – lemon lemon
Table 9: Cosine similarity between each candidate and tar-
get of best particle (excluding initial position) and estima-
tion result in conversation example 2.2. ∗ indicates the
ground truth.
Candidates / Input Initial position input vis1b input vis2b
Cosine similarity of contextual candidates
lemon 0.5000 – –
kiwi 0.5000 – –
pineapple 0.5000 – –
Cosine similarity of situational candidates
banana∗ 0.5000 0.9760 0.9385
apple 0.5000 0.5311 0.6099
orange 0.5000 0.5999 0.7408
Estimation result
Reference type – situational situational
Estimation – banana banana
Figure 7: Change in ratio of reference type in top-30 parti-
cles in conversation example 2.1.
Figure 8: Change in ratio of reference type in top-30 parti-
cles in conversation example 2.2.
Mixed Reference Interpretation in Multi-turn Conversation
327

Figure 9: Change in distribution of particle weights in con-
versation example 2.1.
Figure 10: Change in distribution of particle weights in con-
versation example 2.2.
REFERENCES
Clark, K., Khandelwal, U., Levy, O., and Manning, C. D.
(2019). What does BERT look at? an analysis of
BERT’s attention. arXiv preprint arXiv:1906.04341.
Das, A., Kottur, S., Gupta, K., Singh, A., Yadav, D., Moura,
J. M., Parikh, D., and Batra, D. (2017). Visual dialog.
In Proceedings of the IEEE Conference on Computer
Vision and Pattern Recognition, pages 326–335.
Hatori, J., Kikuchi, Y., Kobayashi, S., Takahashi, K.,
Tsuboi, Y., Unno, Y., Ko, W., and Tan, J. (2018).
Interactively picking real-world objects with uncon-
strained spoken language instructions. In 2018 IEEE
International Conference on Robotics and Automation
(ICRA), pages 3774–3781. IEEE.
Joshi, M., Chen, D., Liu, Y., Weld, D. S., Zettlemoyer,
L., and Levy, O. (2020). SpanBERT: Improving pre-
training by representing and predicting spans. Trans-
actions of the Association for Computational Linguis-
tics, 8:64–77.
Joshi, M., Levy, O., Weld, D. S., and Zettlemoyer, L.
(2019). BERT for coreference resolution: Baselines
and analysis. arXiv preprint arXiv:1908.09091.
Kang, G.-C., Lim, J., and Zhang, B.-T. (2019). Dual at-
tention networks for visual reference resolution in vi-
sual dialog. In Proceedings of the 2019 Conference on
Empirical Methods in Natural Language Processing
and the 9th International Joint Conference on Natural
Language Processing, pages 2024–2033.
Lee, H., Peirsman, Y., Chang, A., Chambers, N., Sur-
deanu, M., and Jurafsky, D. (2011). Stanford’s multi-
pass sieve coreference resolution system at the conll-
2011 shared task. In Proceedings of the fifteenth con-
ference on computational natural language learning:
Shared task, pages 28–34. Association for Computa-
tional Linguistics.
Lee, K., He, L., and Zettlemoyer, L. (2018). Higher-order
coreference resolution with coarse-to-fine inference.
arXiv preprint arXiv:1804.05392.
Mikolov, T., Sutskever, I., Chen, K., Corrado, G. S., and
Dean, J. (2013). Distributed representations of words
and phrases and their compositionality. In Advances in
neural information processing systems, pages 3111–
3119.
Montemerlo, M., Thrun, S., Koller, D., Wegbreit, B., et al.
(2002). FastSLAM: A factored solution to the simulta-
neous localization and mapping problem. AAAI/IAAI,
593598.
Nguyen, V.-Q., Suganuma, M., and Okatani, T. (2020). Ef-
ficient attention mechanism for visual dialog that can
handle all the interactions between multiple inputs.
In Proceedings of the 16th European Conference on
Computer Vision.
Redmon, J., Divvala, S., Girshick, R., and Farhadi, A.
(2016). You only look once: Unified, real-time object
detection. In Proceedings of the IEEE conference on
computer vision and pattern recognition, pages 779–
788.
Takimoto, Y., Fukuchi, Y., Matsumori, S., and Imai, M.
(2020). SLAM-inspired simultaneous contextualiza-
tion and interpreting for incremental conversation sen-
tences. arXiv preprint arXiv:2005.14662.
Whitney, D., Eldon, M., Oberlin, J., and Tellex, S. (2016).
Interpreting multimodal referring expressions in real
time. In 2016 IEEE International Conference on
Robotics and Automation (ICRA), pages 3331–3338.
IEEE.
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
328
