
Time-First Tracking: An Efficient Multiple-Object Tracking
Architecture for Dynamic Surveillance Environments
Joachim Lohn-Jaramillo
1
, Khari-Elijah Jarrett
1
, Laura Ray
1
, Richard Granger
2
and Elijah Bowen
2
1
Thayer School of Engineering, Dartmouth College, 14 Engineering Drive, Hanover, U.S.A.
2
Department of Psychological and Brain Sciences, Dartmouth College, 3 Maynard St., Hanover, U.S.A.
{laura.ray, richard.granger, elijah.floyd.william.bowen}@dartmouth.edu
Keywords: Multiple Object Tracking, DBSCAN, Background Subtraction, and Tracking by Detection.
Abstract: Given the countless hours of video that are generated in surveillance environments, real-time for multi-object
tracking (MOT) is vastly insufficient. Current MOT methods prioritize tracking accuracy in crowded
environments, with little concern for total computational expense, which has led to a reliance on expensive
object detectors to perform tracking. Indiscriminate use of object detectors is not scalable for surveillance
problems and ignores the inherent spatio-temporal variation in scene complexity in many real-world
environments. A novel MOT method is proposed, termed “Time-First Tracking”, which relies on “shallowly”
processed motion with a new tracking method, leaving the use of expensive object detection methods to an
“as-needed” basis. The resulting vast reduction in pixels-processed may yield orders of magnitude in cost
savings, making MOT more tractable. Time-First Tracking is adaptable to spatio-temporal changes in tracking
difficulty; videos are divided into spatio-temporal sub-volumes, rated with different tracking difficulties, that
are subsequently processed with different object localization methods. New MOT metrics are proposed to
account for cost along with code to create a synthetic MOT dataset for motion-based tracking.
1 INTRODUCTION
Current MOT methods are primarily “frame-first”
tracking methods that focus on the visual details of
each frame, instead of focusing on the information
that changes over time like motion. A focus on
motion first is termed “time-first” tracking in this
paper. The MOT Challenges serve as benchmark
datasets in MOT (Dendorfer et al., 2019, 2020; Leal-
Taixé et al., 2015; Milan et al., 2016). The datasets
focus on short video clips with dense, largely
homogenous target distributions. Tracking in these
scenes is very hard and often done with Tracking-by-
Detection (TbD) methods. TbD methods join
sequential detections together to create tracks, where
detections are provided from a trained object detector,
e.g., Ren et al. (2015). Sometimes visual tracking
tools or point tracking strategies are added to improve
tracking output (Bochinski et al., 2019; Keuper et al.,
2018) at the cost of lower processing speeds. The
frame-first approach of object detection and motion
estimation are computational bottlenecks that limit
speeds to near real-time. Researchers treat real-time
processing speeds as adequate, but London alone has
500,000 surveillance cameras yielding more than 10
million video hours per day; lacking dedicated
processing per camera, real-time is vastly inadequate
for both MOT methods and the higher-level tasks that
could use tracking outputs as priors.
Precise object localization may be necessary in
complex scenes, but long-duration videos are quite
simple much of the time. For example, a camera at a
train station will not see the same crowd density at
rush hour as it will at midnight, nor will it see the
same number of people on the tracks versus the
platforms. In uncongested scenes, imprecise motion
estimation, such as a simple background subtraction
routine (Zivkovic, 2004) can localize objects in place
of detectors at a fraction of the cost. Typically, TbD
methods struggle to use these detections because they
are inconsistent and do not always correspond to
single objects. The MOT Challenge datasets overlook
these applications of TbD methods by focusing on
“hard” videos; “easy” videos and their background
models are not included for comparison. One may
reason that if a tracking method can manage a hard
scene, then it can manage an easy one. This is only
true when cost and time constraints are ignored,
602
Lohn-Jaramillo, J., Jarrett, K., Ray, L., Granger, R. and Bowen, E.
Time-First Tracking: An Efficient Multiple-Object Tracking Architecture for Dynamic Surveillance Environments.
DOI: 10.5220/0010304906020611
In Proceedings of the 10th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2021), pages 602-611
ISBN: 978-989-758-486-2
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

otherwise, researchers may consider more efficient
solutions for easy scenes. It would be beneficial for a
MOT method to adapt its approach to variations in
spatio-temporal tracking complexity, so that the cost
of the current approach is proportional to the current
difficulty level. We introduce a proof-of-concept
Time-First Tracking (TFT) architecture that divides a
video into spatio-temporal sub-volumes, classified
with different target densities, that are then processed
with different object localization methods for
tracking. TFT addresses two deficiencies in current
MOT methods, which are that 1) current methods are
not adaptable to imprecise motion estimation, which
imposes a ceiling on processing speed and 2) current
methods treat tracking difficulty as a spatio-temporal-
independent variable, which is unrealistic. Other
contributions include the formation of a new tracklet
generation method, newly proposed cost metrics for
MOT, and code for developing a new synthetic
motion-based MOT dataset.
2 RELATED WORK
Tracking methods require object localization
methods to measure object states. Object localization
can be either detection-based or motion-based. Object
detection is the identification of a specific type of
object with a trained system, e.g., Felzenszwalb et al.
(2010), Redmon et al. (2016), Ren et al. (2015), or
Sadeghi & Forsyth (2014). These methods achieve
good performance on benchmarks like PASCAL
VOC (Everingham et al., 2014), but are expensive
and rely on dedicated hardware to reach real-time
speeds (Canziani et al., 2017). Alternatively, motion
estimation methods can localize moving objects by
finding where in the frame pixel values are changing;
motion estimation is not object specific and varies in
precision, from the pixel to the region level.
2.1 Motion Estimation
Here, “imprecise motion estimation methods,” are the
class of methods that use statistical background
models and/or frame differencing methods to first
detect foreground areas in a frame and then separately
track detections over time to infer regional motion.
These approaches are computationally cheap, but
often inaccurate in unconstrained environments
where there are crowds or illumination changes.
Gaussian Mixture Models (GMMs) (Wren et al.,
1997) are used to generate a statistical model for each
pixel’s intensity values; uncommon values are
foreground, while common values are background.
GMMs can be adjusted over the course of a video
(Stauffer & Grimson, 1999; Zivkovic, 2004). In
general, the quality and complexity of motion
estimation in stationary cameras range from dynamic
GMMs to the simplest frame-difference methods,
e.g., Migliore et al. (2006), Singla (2014), and Zhan
et al. (2007). Sobral & Vacavant (2014) and W. Kim
& Jung (2017) overview the various methods and
relevant datasets that exist in the field today.
“Precise motion estimation methods” explicitly
estimate motion at the pixel level instead of the region
level. Optical flow methods and their analogues
(Farnebäck, 2003; Horn & Schunck, 1981; Lucas &
Kanade, 1981) are primary examples, which analyze
local changes in brightness patterns from frame-to-
frame and create vector fields to describe the motion
of each pixel. Optical flow methods remain a front
end for a large body of computer vision tasks.
However, due to their complexity and high attention
to detail, they are generally slower than real-time
(Simonyan & Zisserman, 2014; Zhang et al., 2016).
2.2 Tracking Methods
MOT methods are designed to maintain/update
multiple tracks and correctly assign new detections to
the appropriate tracks. The MOT Challenges and UA-
DETRAC (Wen et al., 2020) are benchmarks for
tracking performance, where trackers are evaluated
according to the now common tracking metrics from
Bernardin & Stiefelhagen (2008) and Li et al. (2009).
These benchmarks have encouraged significant
progress in TbD techniques, which share many
concepts with data association, a mature field of
research. Works such as Multiple Hypothesis
Tracking (MHT) (Reid, 1979) and Joint Probabilistic
Data Association (JPDA) (Fortmann et al., 1983) are
early examples of systematic mathematical solutions
to tracking that are still applicable, but slow. Recent
efforts have improved the efficiency of MHT and
JPDA (C. Kim et al., 2015; Rezatofighi et al., 2015),
but they are still slower than real-time (Bewley et al.,
2016). To increase speeds, some methods have been
adapted to link small groups of detections,
“tracklets,” rather than individual detections, e.g.,
Benfold & Reid (2011), Dicle et al. (2013), Huang et
al. (2008), and Perera et al. (2006).
MOT can also be made into a graphical problem,
where detections are nodes and interactions between
detections are edges (Bansal et al., 2004; Tang et al.,
2015; Wen et al., 2014). These methods calculate
trajectories by balancing the cost between local pairs
of detections and the total cost of the graph. “Network
flow” methods, e.g., Berclaz et al. (2011) and
Time-First Tracking: An Efficient Multiple-Object Tracking Architecture for Dynamic Surveillance Environments
603

Pirsiavash et al. (2011), are related to graphical
approaches, but also include “sources” and “sinks,”
which direct trajectory paths for optimization.
The vast majority of leading MOT methods in the
MOT Challenges run below 30 frames per second
(fps) with only a few exceptions. Simple Online and
Realtime Tracking (SORT) (Bewley et al., 2016)
shows faster than real-time on the MOT16 dataset and
relies on a Kalman Filter (KF) (Kalman, 1960) for
motion estimation and the Hungarian Algorithm
(Munkres, 1957) for detection assignment. The joint
KF-Hungarian (KF-H) approach is a common and
efficient method, included in MATLAB 2020b
(2020a). Another exception is the IOU tracker
(Bochinski et al., 2017), which builds tracks based
solely on the overlap of detections (intersection-over-
union) between frames. This approach is extremely
fast, running over 1,000 fps, but relies on consistent
detections; minor temporal gaps in detections can
cause identity switches. Bochinski et al. (2019) added
a visual tracker to the IOU method, termed the V-IOU
tracker, which improved accuracy but was an order of
magnitude slower. Current works can be found in the
recent MOT Challenges and UA-DETRAC results.
3 METHODS
Leveraging motion and other visual cues beyond
bounding box proposals is an intuitive approach to
tracking, but when used in conjunction with object
detectors, gains in accuracy come at a high
computational cost. Our TFT architecture aims to
increase tracking speeds by localizing objects with
imprecise motion estimation methods rather than
object detection methods where possible. Motion
detections and object detections are tracked with our
Accumulated Motion Approximation (AMA) tracker.
3.1 Motion Estimation
First, the resolution is reduced to make the input
images smaller. The specific size factor we use is
relative to the size of the smallest object we wish to
detect. If the smallest object is (S x S) pixels, then we
have found that the resolution can be reduced by a
factor of roughly S/3 so that a (3 x 3) morphological
filter can dilate results back to the original size. This
step greatly reduces false foreground detections but
can merge nearby targets into a single foreground
region. In practice, we have not reduced the
resolution much beyond a factor of five. Next, if a
background image is available to serve as the
background model, we subtract the current frame
from the background and threshold the result to make
a black-and-white, or “binary,” frame. Otherwise,
background modeling is performed with an adaptive
GMM (Stauffer & Grimson, 1999) implemented in
MATLAB 2020b (2020b), where typically, default
parameters are used with some minor hand-tuning.
The binary frame is processed with three simple
morphological steps to temporally smooth the results
and reject noise. The current binary frame is filtered
with a (3 x 3) majority filter. Then we find the union
of the current binary frame with the prior two binary
frames. Lastly, another majority filter is used on the
result of that union to produce the final binary frame.
Foreground detections from this frame are filtered by
size and aspect ratio thresholds, which are based on
the size of the objects we expect to track.
Each resulting foreground region is saved with a
feature vector representation of φ = [x, y, f, bX, bY, w,
h, a], which encodes the location and size of the
bounding box that surrounds the detection: (x, y) is
the center of the box, f is the current frame, (bX, bY)
is the top left corner of the box, (w, h, a) is the width,
height, and area of the box. Our approach assumes
that with long-duration video from a particular
camera angle, scene parameters like expected target
size are known, camera motion is minimal, and robust
background models can be built over time.
3.2 AMA Tracklets
We introduce an approach to generate tracklets in
noisy background subtraction environments. Shown
in Figure 1 (a), the inputs are the center locations of
the detected foreground regions from a sequence of τ
frames, referred to as a “Bin” of frames. AMA uses
DBSCAN (Ester et al., 1996) to cluster foreground-
region locations for a Bin, shown in Figure 1 (b).
Efficient indexing methods in DBSCAN avoid the
Figure 1: Generating AMA Tracklets. (a) Detected
foreground regions in a Bin of τ frames. (b) DBSCAN
clustering performed on detection locations (x, y). (c) Lines
of best fit are calculated for each cluster. (d) Missing
detections and partial detections are filled in.
ICPRAM 2021 - 10th International Conference on Pattern Recognition Applications and Methods
604

calculation of distances between all points (Schubert
et al., 2017). After clusters have been formed in the
x-y plane, the frame-dimension is re-included to
calculate three-dimensional orthogonal lines-of-best-
fit, which are the estimated motion vectors for the
clusters (Figure 1 (c)). AMA tracklets have the
advantage of assigning multiple detections on one
frame to the same cluster and filling in missing
detections, which is shown in Figure 1 (d). This
feature is useful in noisy background subtraction
results, where there is not always a one-to-one match
between objects and foreground regions.
Eps, Minpts, and τ are the primary parameters
used to generate tracklets. While there are systematic
methods to finding an optimal value for eps (Satopää
et al., 2011), with foreground detections we choose to
set this parameter based on the half-width of the
average object we expect to track. This imposes a
tracking speed limitation of (eps pixels/frame).
Minpts is two because two detections are needed to
infer a motion vector. Empirically, we have found
that keeping τ small, ~10 frames, solves issues with
inconsistent detections and limits the duration of any
clustering errors, which can be fixed by future steps.
3.3 AMA Tracker
A set of AMA tracklets are found for each Bin of
frames. Sequential Bins are overlapped so that they
Figure 2: Merging AMA Tracklets. Tracklets are created
for each Bin. At frame n*(τ/2)+1, the bounding box from
the middle of tracklet α
j
in Bin
n
(M
j
) is compared with the
starting bounding box from tracklet α
i
in Bin
n+1
(S
i
).
share frames. For example, in Figure 2, Bin
n
contains
detections from frames 1-8, while Bin
n+1
contains
detections from frames 5-12. This was done because
with background subtraction, foreground detections
are inconsistent and can shift dramatically from one
frame to the next. By sharing detections, sequential
tracklets are easier to merge. To merge tracklets, the
midpoints of each tracklet (M
j
) in Bin
n
are compared
to the start points of each tracklet (S
i
) in Bin
n+1
. These
points are bounding boxes, which are compared by 1)
verifying that ratio of intersection area to union of
area (IOU) between bounding boxes is above a
threshold and 2) making sure the centers of the
bounding boxes are within a threshold distance.
These thresholds are hand-tuned for background
subtraction but can be selected with training when
using object detections from a dataset. Only tracklets
from sequential Bins are merged, which can create
identity switches when merging fails. This is a known
deficiency that we plan to address in the future.
3.4 Time-First Tracking
The TFT method is shown in Figure 3 and the details
of each step are described in the following sections.
All steps are repeated for each sequence of frames, or
“Stack.” Unlike Bins, Stacks do not overlap. TFT
intermittently measures target density and then finds
targets with an object detector in high-density regions
and with background subtraction in low-density
regions. This reduces the usage of the object detector,
which should increase overall processing speed but
lower tracking accuracy in low-density regions.
3.4.1 Step 1: Stack Duration
Currently, the video is broken up into pre-defined
Stacks, with a fixed depth of λ frames each, where λ
is 60 frames. In the future, we plan to make λ dynamic
so that the Stack depth can change as the speed and
spatial distribution of targets changes. The first frame
of each Stack is analyzed by a trained object detector,
resulting in a set of proposed bounding boxes for the
entire frame.
3.4.2 Steps 2 & 3: Sub-volume Creation
Detections from the first frame of a Stack are used to
determine the spatial boundary between high- and
low-density regions. We input target locations to
DBSCAN to differentiate between high-density areas
(clusters) and low-density areas (noise): eps is hand-
tuned and minpts = 3. In high-target-density areas, it
is hard to accurately localize objects. Clustered points
Time-First Tracking: An Efficient Multiple-Object Tracking Architecture for Dynamic Surveillance Environments
605
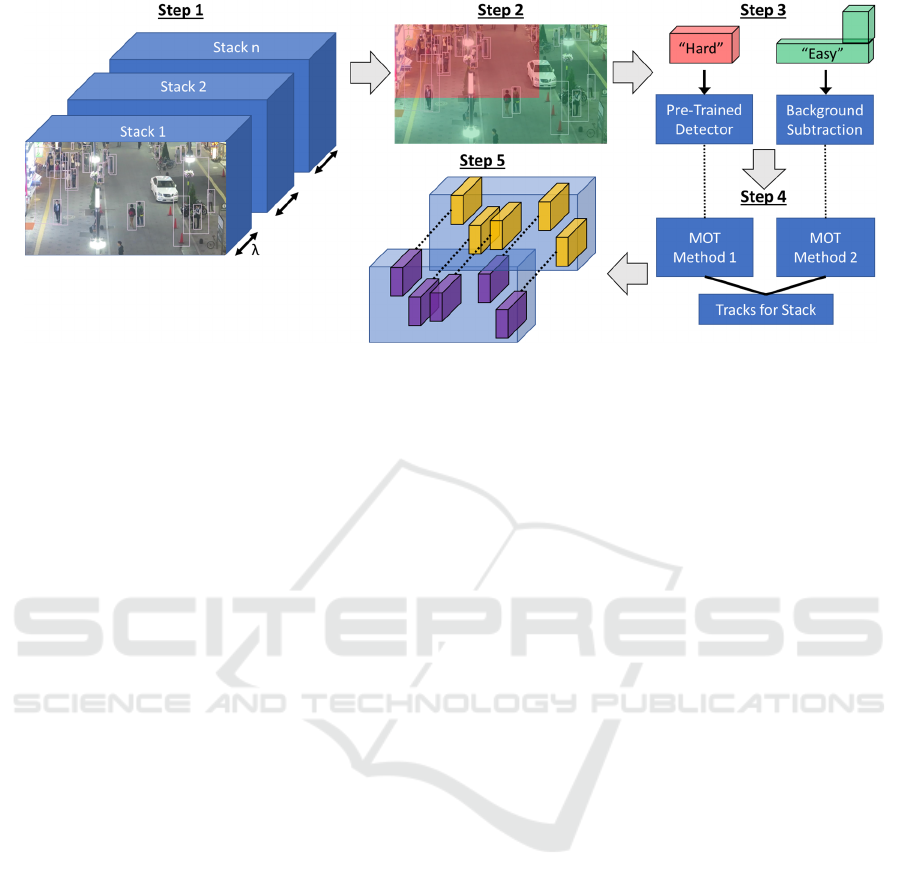
Figure 3: Current TFT Architecture. (Step 1) Split the video into Stacks, each containing λ frames. Run an object detector on
the first frame of the Stack. (Step 2) Analyze object-detection density for the first frame of a Stack and then split the frame
into two regions (high/low density). (Step 3) Keep spatial boundaries constant for all frames in the Stack to create sub-
volumes. Pass pixels from the hard sub-volume to an object detector and pixels from the easy sub-volume to a background
subtraction routine. (Step 4) Utilize separate trackers for the separate sub-volumes and merge the results. (Step 5) After each
Stack is analyzed, connect tracks from adjacent Stacks to create contiguous tracks.
are given a “hard” label, while noise points are given
an “easy” label. A naïve Bayes classifier is fit to the
labeled locations. The classifier predicts labels for a
grid of test points to form a single bounded hard
region. The procedure for region segmentation is an
area for future work.
Spatial boundaries are currently kept constant for
each frame of a Stack, creating two sub-volumes with
different target density levels. In the hard sub-
volume, a trained object detector, e.g. Faster R-CNN
(Ren et al., 2015), is used to localize objects for
tracking. In the easy sub-volume, the background
subtraction method from section 3.1 is used to detect
moving objects. In the future we plan to expand TFT
to handle multiple hard sub-volumes extruded in any
direction, instead of being held in place.
3.4.3 Step 4: Tracking in Sub-volumes
The TFT architecture is setup to use two separate
tracking methods for different sub-volumes, which
allows current TbD methods to be easily adapted. In
testing, we have implemented different combinations
of the AMA tracker, a MATLAB (2020a) KF-H
tracker, and the IOU tracker (Bochinski et al., 2017).
Easy sub-volumes are the target of the AMA tracker,
since noisy, imprecise results are expected here, but
the AMA tracker can operate in both sub-volumes,
with different parameters. When AMA uses object
detections as inputs, eps and the IOU merge threshold
are selected through training instead of being based
on object size. Tracks are computed independently in
each region and can begin in one region and terminate
in another. Such tracks are merged with proximity
and directional constraints to create a single set of
tracks for a Stack.
3.4.4 Step 5: Connecting Stacks
To connect tracks between sequential Stacks, end
points from tracks in Stack
n
are compared to start
points of tracks in Stack
n+1
using IOU overlap and
centroid distance thresholds. This is an expedient way
to connect Stacks, but it is fragile to inter-frame
inconsistencies. This is an area that will be further
explored in future work.
3.5 Evaluation Criteria
In addition to the common metrics from Bernardin &
Stiefelhagen (2008) and Li et al. (2009), we propose
estimating detector-processing time by assuming a
fixed speed, rather using a timed value, to avoid
introducing hardware specific results. We find this
reasonable, considering a range of detectors run
between 1-200 fps, e.g., Cao et al. (2019), Redmon et
al. (2016), Ren et al. (2015), and Sadeghi & Forsyth
(2014). We estimate detector time (DT) for a
particular video as
DT (s) = (nF * PixF) / (DS) (1)
where nF is the total number of frames in the video,
PixF is the fraction of pixels of the video that were
processed by the object detector, and DS is the
assumed detector speed in frames per second. If
ICPRAM 2021 - 10th International Conference on Pattern Recognition Applications and Methods
606
detections from every full frame of the video are used,
PixF = 1. Scaling detector time by PixF may not be
exact in practice, due to overhead and architectural
constraints, but it is a simple gauge of detector usage.
4 RESULTS
Preliminary results for the AMA tracker include an
average MOTA score of 40.3 on the MOT17 training
dataset with eps = 20, minpts = 2, IOU merge
threshold of 0.65, and a distance threshold of 2*eps.
The average processing speed on a computer with a
2.4 GHz Intel i9 CPU is roughly 3,000 fps, excluding
the time for object detections. The IOU tracker
achieves an average MOTA of 47.4 at 4,000 fps, and
a MATLAB KF-H tracker achieves an average
MOTA of 46.9 at 900 fps.
These speeds are two orders of magnitude faster
Than most published methods on the MOT Challenge
and are only possible because visual features beyond
object detections are ignored. This points to a need to
decouple appearance-based tracking methods from
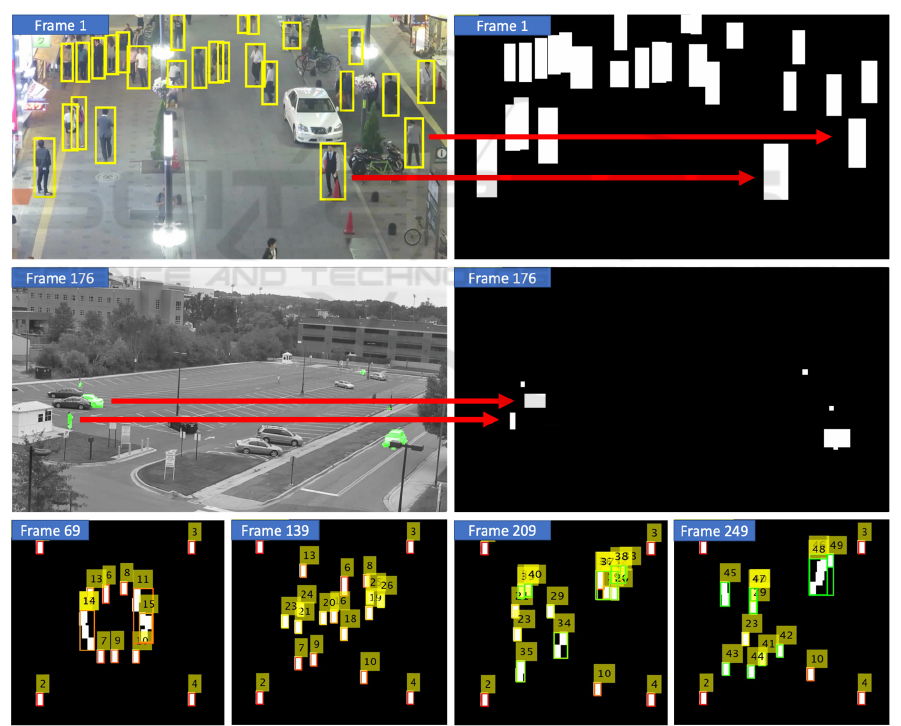
motion-based tracking methods. A tracking method
that ignores visual features would view a video frame
like a background subtracted frame, where the
detections are the only inputs. This is visualized in the
top row of Figure 4, where a frame from a MOT
Challenge video is beside a blank frame filled with
the same object detections. Background subtraction
can produce similar but less consistent bounding
boxes, as shown in the second row of Figure 4 with a
frame from the VIRAT dataset (Oh et al., 2011).
Binary videos like this can be programmatically
constructed, greatly expanding the number of labeled
scenes for researchers to use. We have constructed a
Figure 4: Ignoring Visual Features. In the top row, object detections are shown from a MOT Challenge video; detections are
shown in yellow on the left and as white boxes on the right. In the middle row, foreground detections via background
subtraction are shown from a VIRAT video; detections are shown in green on the left and as white boxes on the right. In the
bottom row, a frame sequence is shown from our synthetic video, with the AMA tracker results overlaid.
Time-First Tracking: An Efficient Multiple-Object Tracking Architecture for Dynamic Surveillance Environments
607
tool to create these synthetic tracking videos, which
model overhead, stationary cameras. Frames from an
example video are shown in the bottom row of Figure
4 with the AMA tracker results overlaid. We plan to
create a dataset where the number of targets can be
varied, noise can be added, and false positives can be
simulated. We are interested in comparing tracking
methods across cross-sections of the dataset, e.g.,
measuring how processing speed varies with the
number of targets.
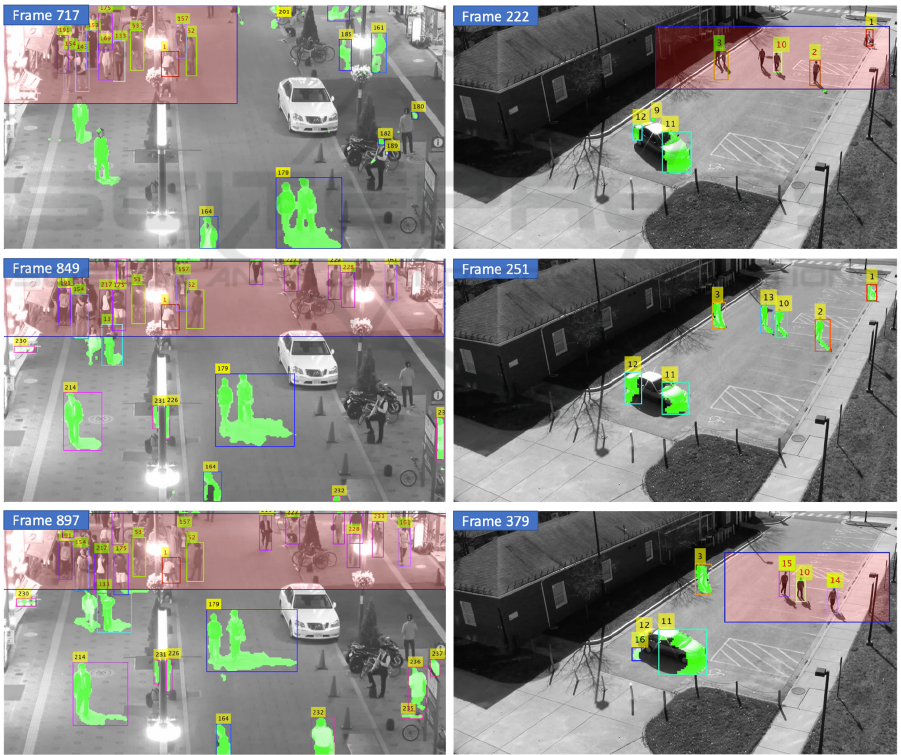
TFT is designed for long duration videos from a
stationary camera that exhibit variable target
densities. Most MOT-oriented datasets are composed
of short clips, do not contain background models, and
primarily model high-target-density scenes, making
the full datasets poor benchmarks for this approach.
Qualitative results on one of the few overhead videos
from the MOT Challenge are shown in the left
column of Figure 5. The hard regions are shown in
red and change location throughout the video. In the
right column of Figure 5, another example is shown
from a video in the VIRAT dataset using Aggregate
Channel Feature detections (Dollar et al., 2014). The
PixF value for the MOT Challenge video and the
VIRAT video is 0.36 and 0.19, respectively. If a
detector runs at 30 fps, the estimated detector time
would be 12.6 and 4.7 seconds, respectively. Were
the detector run on every full frame of the video (as
usual), the estimated detector-processing time would
increase to 35 and 25 seconds, respectively. The
increase in speed of TFT comes with the introduction
of visible tracking errors, e.g., track 179 in the left
column of Figure 5. The aim of our future work is
quantifying the trade-off between accuracy and cost,
making the TFT architecture more dynamic, and
processing more real-world videos.
Figure 5: Qualitative Results for TFT. The frames in the left column come from a MOT Challenge video and the frames on
the right column come from a VIRAT video. The hard region is the red shaded box, while the easy region is outside the box
with foreground detections shown in green. Tracking errors are introduced in easy region, e.g., track 179 in left column.
ICPRAM 2021 - 10th International Conference on Pattern Recognition Applications and Methods
608

5 CONCLUSIONS
In long-duration videos, hard and easy scenes are not
separate problems and spatial target distribution can
be quite non-homogenous. Access to dedicated
hardware may be limited in surveillance settings, so
MOT methods must prioritize efficiency and avoid
the indiscriminate use of frame-first methods. The
TFT architecture relies on cheap background
modeling to handle scenes with simple tracking
complexity, while reserving frame-first methods to an
as-needed basis. We also show an adaptation of
DBSCAN for MOT in our AMA tracker. Current
work is aimed at building a new dataset for motion-
based tracking methods, providing an extensive
quantitative evaluation of our methods, and
expanding the AMA and TFT methods to improve
tracking errors after the first-pass track proposals
have been made, e.g., Jarrett et al. (2019).
ACKNOWLEDGEMENTS
This research was supported in part by grant N00014-
16-1-2359 from the Office of Naval Research.
REFERENCES
Bansal, N., Blum, A., & Chawla, S. (2004). Correlation
Clustering. Machine Learning.
Benfold, B., & Reid, I. (2011). Stable multi-target tracking
in real-time surveillance video. IEEE Conference on
Computer Vision and Pattern Recognition, 3457–3464.
Berclaz, J., Fleuret, F., Türetken, E., & Fua, P. (2011).
Multiple object tracking using k-shortest paths
optimization. IEEE Transactions on Pattern Analysis
and Machine Intelligence, 33(9), 1806–1819.
Bernardin, K., & Stiefelhagen, R. (2008). Evaluating
multiple object tracking performance: The CLEAR
MOT metrics. EURASIP Journal on Image and Video
Processing.
Bewley, A., Ge, Z., Ott, L., Ramos, F., & Upcroft, B.
(2016). Simple online and realtime tracking. 2016 IEEE
International Conference on Image Processing (ICIP),
3464–3468.
Bochinski, E., Eiselein, V., & Sikora, T. (2017). High-
Speed tracking-by-detection without using image
information. IEEE International Conference on
Advanced Video and Signal Based Surveillance (AVSS),
1–6.
Bochinski, E., Senst, T., & Sikora, T. (2019). Extending
IOU Based Multi-Object Tracking by Visual
Information. IEEE International Conference on
Advanced Video and Signal-Based Surveillance
(AVSS), 1–6.
Canziani, A., Culurciello, E., & Paszke, A. (2017).
Evaluation of neural network architectures for
embedded systems. Proceedings - IEEE International
Symposium on Circuits and Systems.
Cao, Z., Hidalgo Martinez, G., Simon, T., Wei, S.-E., &
Sheikh, Y. A. (2019). OpenPose: Realtime Multi-
Person 2D Pose Estimation using Part Affinity Fields.
IEEE Transactions on Pattern Analysis and Machine
Intelligence.
Dendorfer, P., Rezatofighi, H., Milan, A., Shi, J., Cremers,
D., Reid, I., Roth, S., Schindler, K., & Leal-Taixe, L.
(2019). CVPR19 Tracking and Detection Challenge:
How crowded can it get? Unpublished.
Dendorfer, P., Rezatofighi, H., Milan, A., Shi, J., Cremers,
D., Reid, I., Roth, S., Schindler, K., & Leal-Taixé, L.
(2020). MOT20: a benchmark for multi object tracking
in crowded scenes. Unpublished.
Dicle, C., Camps, O. I., & Sznaier, M. (2013). The way they
move: Tracking multiple targets with similar
appearance. Proceedings of the IEEE International
Conference on Computer Vision.
Dollar, P., Appel, R., Belongie, S., & Perona, P. (2014).
Fast feature pyramids for object detection. IEEE
Transactions on Pattern Analysis and Machine
Intelligence.
Ester, M., Kriegel, H.-P., Sander, J., & Xu, X. (1996). A
Density-Based Algorithm for Discovering Clusters in
Large Spatial Databases with Noise. Proceedings of the
2nd International Conference on Knowledge Discovery
and Data Mining, 226–231.
Everingham, M., Eslami, S. M. A., Van Gool, L., Williams,
C. K. I., Winn, J., & Zisserman, A. (2014). The Pascal
Visual Object Classes Challenge: A Retrospective.
International Journal of Computer Vision.
Farnebäck, G. (2003). Two-frame motion estimation based
on polynomial expansion. Proceedings of the 13th
Scandinavian Conference on Image Analysis, 363–370.
Felzenszwalb, P. F., Girshick, R. B., McAllester, D., &
Ramanan, D. (2010). Object detection with
discriminatively trained part-based models. IEEE
Transactions on Pattern Analysis and Machine
Intelligence, 32(9), 1627–1645.
Fortmann, T. E., Bar-Shalom, Y., & Scheffe, M. (1983).
Sonar Tracking of Multiple Targets Using Joint
Probabilistic Data Association. IEEE Journal of
Oceanic Engineering.
Horn, B. K., & Schunck, B. G. (1981). Determining Optical
Flow. Artifical Intelligence, 17(1–3), 185–203.
Huang, C., Wu, B., & Nevatia, R. (2008). Robust Object
Tracking by Hierarchical Association of Detection
Responses. European Conference on Computer Vision,
788–801.
Jarrett, K., Lohn-Jaramillo, J., Bowen, E., Ray, L., &
Granger, R. (2019). Feedforward and feedback
processing of spatiotemporal tubes for efficient object
localization. International Conference on Pattern
Recognition Applications and Methods.
Kalman, R. E. (1960). A new approach to linear filtering
and prediction problems. Journal of Fluids
Engineering, Transactions of the ASME.
Time-First Tracking: An Efficient Multiple-Object Tracking Architecture for Dynamic Surveillance Environments
609

Keuper, M., Tang, S., Andres, B., Brox, T., & Schiele, B.
(2018). Motion Segmentation & Multiple Object
Tracking by Correlation Co-Clustering. IEEE
Transactions on Pattern Analysis and Machine
Intelligence.
Kim, C., Li, F., Ciptadi, A., & Rehg, J. M. (2015). Multiple
hypothesis tracking revisited. Proceedings of the IEEE
International Conference on Computer Vision.
Kim, W., & Jung, C. (2017). Illumination-Invariant
Background Subtraction: Comparative Review,
Models, and Prospects. In IEEE Access.
Leal-Taixé, L., Milan, A., Reid, I., Roth, S., & Schindler,
K. (2015). MOT challenge 2015: towards a benchmark
for multi-target tracking. Unpublished.
Li, Y., Huang, C., & Nevatia, R. (2009). Learning to
associate: Hybridboosted multi-target tracker for
crowded scene. IEEE Conference on Computer Vision
and Pattern Recognition Workshops, 2953–2960.
Lucas, B. D., & Kanade, T. (1981). An Iterative Image
Registration Technique with an Application to Stereo
Vision. Proceedings from the 7th IJCAI, 674–679.
MATLAB 2020b. (2020a). Motion-Based Multiple Object
Tracking. Mathworks Inc.
https://www.mathworks.com/help/vision/ug/motion-
based-multiple-object-tracking.html
MATLAB 2020b. (2020b). vision.ForegroundDetector.
Mathworks Inc.
https://www.mathworks.com/help/vision/ref/vision.for
egrounddetector-system-object.html
Migliore, D. A., Matteucci, M., & Naccari, M. (2006). A
revaluation of frame difference in fast and robust
motion detection. Proceedings of the ACM
International Multimedia Conference and Exhibition.
Milan, A., Leal-Taixé, L., Reid, I., Roth, S., & Schindler,
K. (2016). MOT16: a benchmark for multi-object
tracking. Unpublished.
Munkres, J. (1957). Algorithms for the Assignment and
Transportation Problems. Journal of the Society for
Industrial and Applied Mathematics, 5(1), 32–38.
Oh, S., Hoogs, A., Perera, A., Cuntoor, N., Chen, C. C.,
Lee, J. T., Mukherjee, S., Aggarwal, J. K., Lee, H.,
Davis, L., Swears, E., Wang, X., Ji, Q., Reddy, K.,
Shah, M., Vondrick, C., Pirsiavash, H., Ramanan, D.,
Yuen, J., … Desai, M. (2011). A large-scale benchmark
dataset for event recognition in surveillance video.
IEEE Conference on Computer Vision and Pattern
Recognition, 3153–3160.
Perera, A. G. A., Srinivas, C., Hoogs, A., Brooksby, G., &
Hu, W. (2006). Multi-object tracking through
simultaneous long occlusions and split-merge
conditions. IEEE Conference on Computer Vision and
Pattern Recognition, 666–673.
Pirsiavash, H., Ramanan, D., & Fowlkes, C. C. (2011).
Globally-optimal greedy algorithms for tracking a
variable number of objects. IEEE Conference on
Computer Vision and Pattern Recognition, 1201–1208.
Redmon, J., Divvala, S., Girshick, R., & Farhadi, A. (2016).
You only look once: Unified, real-time object detection.
IEEE Conference on Computer Vision and Pattern
Recognition (CVPR), 779–788.
Reid, D. B. (1979). An Algorithm for Tracking Multiple
Targets. IEEE Transactions on Automatic Control.
Ren, S., He, K., Girshick, R., & Sun, J. (2015). Faster R-
CNN: Towards real-time object detection with region
proposal networks. Advances in Neural Information
Processing Systems (NIPS).
Rezatofighi, S. H., Milan, A., Zhang, Z., Shi, Q., Dick, A.,
& Reid, I. (2015). Joint probabilistic data association
revisited. Proceedings of the IEEE International
Conference on Computer Vision.
Sadeghi, M. A., & Forsyth, D. (2014). 30Hz object
detection with DPM V5. Lecture Notes in Computer
Science (Including Subseries Lecture Notes in Artificial
Intelligence and Lecture Notes in Bioinformatics).
Satopää, V., Albrecht, J., Irwin, D., & Raghavan, B. (2011).
Finding a “kneedle” in a haystack: Detecting knee
points in system behavior. Proceedings - International
Conference on Distributed Computing Systems.
Schubert, E., Sander, J., Ester, M., Kriegel, H. P., & Xu, X.
(2017). DBSCAN revisited, revisited: Why and how
you should (still) use DBSCAN. ACM Transactions on
Database Systems.
Simonyan, K., & Zisserman, A. (2014). Two-stream
convolutional networks for action recognition in
videos. Advances in Neural Information Processing
Systems.
Singla, N. (2014). Motion Detection Based on Frame
Difference Method. International Journal of
Information & Computation Technology.
Sobral, A., & Vacavant, A. (2014). A comprehensive
review of background subtraction algorithms evaluated
with synthetic and real videos. Computer Vision and
Image Understanding.
Stauffer, C., & Grimson, W. E. L. (1999). Adaptive
background mixture models for real-time tracking.
Proceedings of the IEEE Computer Society Conference
on Computer Vision and Pattern Recognition.
Tang, S., Andres, B., Andriluka, M., & Schiele, B. (2015).
Subgraph decomposition for multi-target tracking.
Proceedings of the IEEE Computer Society Conference
on Computer Vision and Pattern Recognition.
Wen, L., Du, D., Cai, Z., Lei, Z., Chang, M. C., Qi, H., Lim,
J., Yang, M. H., & Lyu, S. (2020). UA-DETRAC: A
new benchmark and protocol for multi-object detection
and tracking. Computer Vision and Image
Understanding, 193.
Wen, L., Li, W., Yan, J., Lei, Z., Yi, D., & Li, S. Z. (2014).
Multiple target tracking based on undirected
hierarchical relation hypergraph. Proceedings of the
IEEE Computer Society Conference on Computer
Vision and Pattern Recognition.
Wren, C. R., Azarbayejani, A., Darrell, T., & Pentland, A.
P. (1997). P finder: real-time tracking of the human
body. IEEE Transactions on Pattern Analysis and
Machine Intelligence.
Zhan, C., Duan, X., Xu, S., Song, Z., & Luo, M. (2007). An
improved moving object detection algorithm based on
frame difference and edge detection. Proceedings of the
4th International Conference on Image and Graphics,
ICIG 2007.
ICPRAM 2021 - 10th International Conference on Pattern Recognition Applications and Methods
610

Zhang, B., Wang, L., Wang, Z., Qiao, Y., & Wang, H.
(2016). Real-Time Action Recognition with Enhanced
Motion Vector CNNs. Proceedings of the IEEE
Computer Society Conference on Computer Vision and
Pattern Recognition.
Zivkovic, Z. (2004). Improved adaptive Gaussian mixture
model for background subtraction. Proceedings of the
17th International Conference on Pattern Recognition,
2004, 28-31 Vol.2.
Time-First Tracking: An Efficient Multiple-Object Tracking Architecture for Dynamic Surveillance Environments
611
