
An Effective Driver Intention and Trajectory Prediction for Autonomous
Vehicle based on LSTM
Fatimetou El Jili
Altran Prototypes Automobiles, Research Departement, 02 rue Paul Dautier, 78140, France
Keywords:
Artificial Intelligence, Intention Prediction, Trajectory Prediction, Deep Learning, Long Short Term Memory,
CARLA Simulator, Autonomous Driving.
Abstract:
In order to make the navigation system of autonomous vehicle more robust and safe in urban environment we
propose in this paper a model for driver intention prediction and trajectory prediction. The proposed model
is based on LSTM (long short term memory). The model was trained on database of features collected from
the driving simulator CARLA. This paper treats four type of intentions, turn left, turn right, go straight and
stopping intention. Two cases were treated, the first case is to predict intention before it occurs, the second
case corresponds to intention recognition, where the driver already starts maneuvering the intention. Both
cases are treated by the same model. The model shows better performances for the second case than the first
case with small differences. The main strength of our model is that it gives good performances with a small set
of features. The accuracy of the model is 96% for intention prediction and 97% for the intention recognition.
The proposed method for trajectory prediction reach an accuracy of 99.9%. Those accuracies are higher than
what we found in state of art.
1 INTRODUCTION
Autonomous driven is a very complex system that re-
quires a lot of constraints to perform as the best hu-
man driving or better. In order to make a robust and
safe navigation system, understanding other driver’s
intentions is one of the most important task. By pre-
dicting the surrounding vehicles intentions, the au-
tonomous vehicle can plan its trajectory in a way that
it can avoid collision with other vehicles. In gen-
eral collisions happen due to a false identification
of driver’s intentions or a lack of attention from the
driver.
In this paper we propose a method for driver in-
tention prediction and recognition for self driving ve-
hicles at several type of intersection (tree way, two
way and four way intersections), where intentions are
turn left and turn right, go straight and, stop, it also
gives intention on one way where in ideal case in-
tentions are stopping or going straight. This method
also gives the direction the vehicle is fellowing to ma-
noeuvre the intention. We also propose a method for
trajectory prediction. These methods can be used for
ADAS systems.
More recently in the last decade with the appari-
tion of autonomous vehicle and ADAS system, driver
intention prediction has been a topic of interest of
researchers. A variety of approches were proposed
for driver intention prediction. Some statistical meth-
ods (L.R Rabiner, 1986), (Streubel and Hoffmann,
2014), (Hou and al., 2011) were proposed to solve
this problem. Some machine learning methods like
SVM (Support Vector Machines) in (B. Tang, 2015)
and GP (Gaussian Process) (Laugier and al., 2011)
were also used to solve this problematic. Most of
these work needs a huge datasets to train their model
and some complex features, like when lane detection
is required, these additional tasks related to those fea-
tures computational time give rise to the model com-
putational time increasement. Whereas, our model
use a small dataset and a small set of features which
doesn’t need any additional tasks or complex artificial
intelligence algorithms to compute those features.
In (Hou and al., 2011) authors used CHMM (Con-
tinuous Hidden Markov Model ) for driver intention
prediction which gives an accuracy of 95% for in-
tention recognition, while in (B. Tang, 2015) SVM
gives an accuracy of 90% 1.6 s before the intersec-
tion and an accuracy of 93% at intersection for a gen-
eralized method for driver intention prediction at in-
tersection. There are other approches based on deep
learning specially RNN (Recurrent Neural Network)
(A. Zyner and Nebot, 2018), LSTM (Long-Short
Term Memory) (Sepp Hochreiter, 1997), (Hao Xue
1090
El Jili, F.
An Effective Driver Intention and Trajectory Prediction for Autonomous Vehicle based on LSTM.
DOI: 10.5220/0010321710901096
In Proceedings of the 13th International Conference on Agents and Artificial Intelligence (ICAART 2021) - Volume 2, pages 1090-1096
ISBN: 978-989-758-484-8
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All r ights reserved
and Reynolds, 2018), (Derek J. Phillips and Kochen-
derfe, 2017), deep inverse reinforcement learning
(Zhang and al., 2018) and deep convolutional net-
work in (Djuric and al., 2019). In (Derek J. Phillips
and Kochenderfe, 2017) the LSTM model gives 95%
on dataset regrouping all kind of intersections. In
(B. Tang, 2015) authors proposed a method based
on HMM (Hidden Markov Model) for prediction of
driver intended path which gives an accuracy up to
90% 7 seconds before entering the intersection area.
Our model gives a higher accuracy than what we
found in state of art. This model doesn’t require any
information about roads and the map. Section 2 illus-
trates the LTSM(Sepp Hochreiter, 1997) model used
in this work to perform the prediction. In section 3 we
present an overview of the proposed method. Section
4 exhibits the model selection and datasets collection
details.
2 LSTM: LONG SHORT TERM
MEMORY
LSTM (Long Short Term Memory) (Sepp Hochre-
iter, 1997) is a novel architecture of recurrent neural
network (A. Zyner and Nebot, 2018) with an appro-
priate gradient based learning algorithm. The RNN
(Recurrent Neural Network) can use past information
when the time gap between past and present is short,
whereas when the time gap become long the RNN
can not learn exact information from the past.LSTM
was designed to remediate this problem so it can learn
from the past even when the time gap between past
and present is long, it also can learn when the input
data is incomprehensible due to noise. It is useful for
sequential data, time series data, speech processing,
etc ...
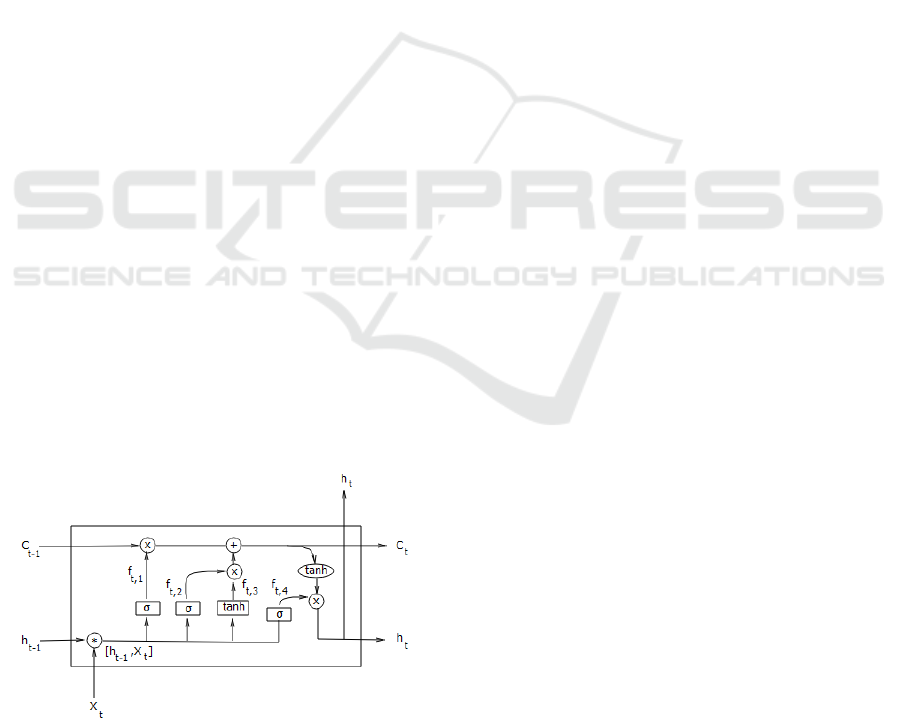
Figure 1: LSTM variant.
Figure 1 illustrate an exemple of LSTM variant at step
t of the model, or in other words when the input of
the model is the sequence of data collected at time
t. There is many variants of LSTM, researchers have
shown that almost all variants have the same perfor-
mances. The variables X
t
, C
t−1
and h
t−1
are respec-
tively the input of the network at the step t, the mem-
ory cell at the step t −1 and the output of the network
at the step t −1. These variables are given as the input
of the network at the step t to compute the output h
t
and the memory cell C
t
. The memory cells stores the
information about the past at each step of the model
in order to be used as input of the next step. For the
variant in figure 1, the memory cell C
t
and the output
h
t
are given by the following equations:
C
t
= f
t,1
C
t−1
+ f
t,2
f
t,3
, (1)
h
t
= f
t,4
tanh(C
t
), (2)
Where f
t,1
, f
t,2
, f
t,3
and f
t,4
are given by the equations
below :
f
t,1
= σ(W
t,1
[h
t−1
, X
t
] + B
t,1
), (3)
f
t,2
= σ(W
t,2
[h
t−1
, X
t
] + B
t,2
), (4)
f
t,3
= tanh(W
t,3
[h
t−1
, X
t
] + B
t,3
), (5)
f
t,4
= σ(W
t,4
[h
t−1
, X
t
] + B
t,4
), (6)
B
t,i
and W
t,i
, 1 ≤ i ≤ 4, correspond respectively to the
biais vector and the weight matrix, and σ the softmax
function.
3 THE PROPOSED METHOD FOR
DRIVER INTENTION AND
TRAJECTORY PREDICTION
This paper focus mainly on intention prediction,
recognition, and trajectory prediction. The term
recognition is used when the intention already oc-
curred or its manoeuvre already starts. In this work
intention prediction is treated as a classification prob-
lem. Given the past information : starting from the
present back to the past though a given interval of
time, we predict or recognize the driver intention.
Trajectory prediction is a regression problem. In this
paper the prediction task needs information from the
past to perform the prediction. The state of art shows
that the LSTM (Sepp Hochreiter, 1997) is one of the
strongest model for this kind of problem.
3.1 Intention Prediction
This work focus on predicting driver’s intention
mainly turn right, turn left, stop and go straight ac-
tion. Figure 2 illustrate all possible actions in a four
way intersection, we observe 8 kind of action depend-
ing to driver direction. The two remaining actions
An Effective Driver Intention and Trajectory Prediction for Autonomous Vehicle based on LSTM
1091
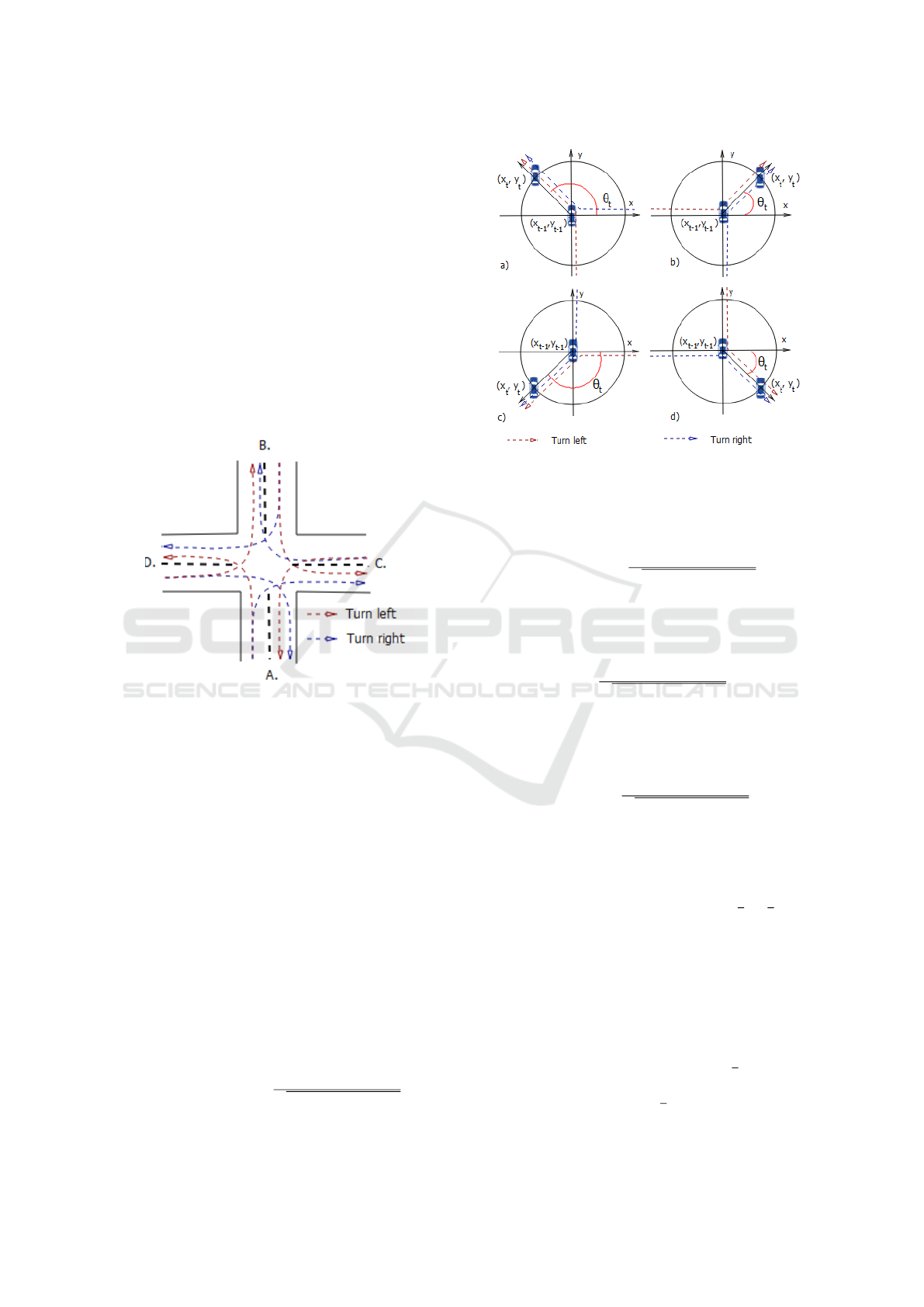
which are stopping and going straight whom are not
presented in this figure. Thus for this task we have
in total 10 intentions to predict or recognize, which
means we have 10 classes, let C = {C
j
, 1 ≤ j ≤ 10}
be the set of classes. Those actions can be maneu-
vered at any other kind of roads ( 2 ways intersection,
3 ways intersections, etc ...). Some of this actions can
be forbidden according to the type of the road and the
trafic regulation rules.
Datasets corresponding to each action were col-
lected during a given interval of time, this interval
starts few seconds before the action occurs and it ends
few seconds after it occurs. The datasets collected
before the actions occurrence were used for different
time window size, to predict drivers’s intentions.
Figure 2: Four ways intersection.
3.1.1 Features
In addition to classical features (position, accelera-
tion, velocity, etc...) we’ve defined an important fea-
ture that are effective for the prediction task. This
feature made the model perform better, specially the
recognition, we named it the directional tilt angle of
the vehicle, we denote θ
t
this angle. This angle is cre-
ated between the abscissa axis and the vector created
by the past position (x
t−1
, y
t−1
) and the present posi-
tion (x
t
, y
t
) of the vehicle.
The angle θ
t
varies according to the vehicle di-
rection, in other words it depends on the positions
(x
t−1
, y
t−1
) and (x
t
, y
t
) of the vehicle. Figure 3 illus-
trates how the angle is created for different cases, the
angle θ
t
is given by the fellowing equations:
• If x
t
< x
t−1
and y
t
≥ y
t−1
, this corresponds to the
case a) of figure 3, where θ
t
is given by:
θ
t
= 180 −arccos
|x
t
−x
t−1
|
√
(x
t
−x
t−1
)
2
+(y
t
−y
t−1
)
2
(7)
Figure 3: The directional tilt angle of the vehicle.
• If x
t
> x
t−1
and y
t
≥ y
t−1
, this corresponds to the
case b) of figure 3, where θ
t
is given by :
θ
t
= arccos
|x
t
−x
t−1
|
√
(x
t
−x
t−1
)
2
+(y
t
−y
t−1
)
2
(8)
• If x
t
≤ x
t−1
and y
t
< y
t−1
, this corresponds to the
case c) of figure 3, where θ
t
is given by :
θ
t
= arccos
|x
t
−x
t−1
|
√
(x
t
−x
t−1
)
2
+(y
t
−y
t−1
)
2
−180 (9)
• If x
t
≥ x
t−1
and y
t
< y
t−1
, this corresponds to the
case d) of figure 3, where θ
t
is given by :
θ
t
= −arccos
|x
t
−x
t−1
|
√
(x
t
−x
t−1
)
2
+(y
t
−y
t−1
)
2
(10)
For the remaining case where, x
t
= x
t−1
and y
t
= y
t−1
,
which correspond to stopping action, x
t
−x
t−1
= y
t
−
y
t−1
= 0, in this case θ
t
can’t be computed using the
arccos function. For this sake θ
t
is set to 1. For going
straight intention θ
t
can take the value 0,
π
2
, −
π
2
, or π
depending on the direction of the vehicle.
For the remaining intention maneuvering the an-
gle θ
t
takes value in the interval ] −π, π]. Let’s take
the case a) of figure 3, if we refer to the figure 2 we
can observe that we have two possible intentions be-
side going straight an stopping intentions: the inten-
tion of going from A to D and the intention of going
from C to B. The first intention corresponds to a turn
left for this case the angle θ
t
varies from
π
2
to π, while
the second intention corresponds to a turn right, where
the angle θ
t
varies from π to
π
2
.
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
1092

3.1.2 The Model
The model used in this paper is a four layers LSTM
with tree hidden layers of 128 neurones each and an
output layer with 10 neurones corresponding each to
a given class C
j
, 1 ≤ j ≤ 10. The hidden layers use
the rectified linear unit (ReLU) as activation function.
The output layer use the softmax function to compute
the probability that the observation is the in a given
class. This model use as loss function the categorical
crossentropy given by the fellowing equation:
L(Y,
ˆ
Y ) = −
1
M
M
∑
i=1
N
∑
j=1
1
o
i
∈C
j
log(P(o
i
∈C
j
)) (11)
Where, N is the number of classes, M the number of
observation, o
i
the ith observation, Y vector of the
truth labels, and
ˆ
Y the vector of predicted labels.
To find the minimum of the loss function or ap-
proximate it the model uses a stochastic optimization
method called the Adam optimized (D. P. Kingma,
2015). The model is trained on dataset for differ-
ent time windows size and different number of fea-
tures in order to select the those that gives the best
performances. The model was tested on data coming
from time windows situated at different time to inten-
tion occurrence values, to evaluate its performances
in term of it.
3.2 Trajectory Prediction
The trajectory prediction method use the same fea-
tures as the intention prediction one. Since the trajec-
tory prediction is mainly about predicting a sequence
of the vehicle’s positions in future, we denote
ˆ
T the
predicted trajectory,
ˆ
T = {( ˆx
k
, ˆy
k
) ∈ R
2
: m +1 ≤k ≤
K + m}, where K is the number of the predicted po-
sitions, and m is the length of the previous time win-
dow used to prediction (x
k
, y
k
), let L be the size of the
window in second L =
m
f
s
, where f
s
= 10 Hz is the
frequency of data collection.
Since (x
k
, y
k
) are in R
2
, this means we are facing
a regression task. To predict trajectories we use the
same model used for intention prediction with differ-
ent loss function and different output layer. The loss
function in this case is the mean squared error. The
model was trained on different time window size for
different number of features in order to select those
which give better performances.
3.2.1 Prediction of One Point of the Trajectory
To predict the point (x
t
, y
t
) of the trajectory, the model
takes as input, the previous m sequence of features
collected during the past time window of size L. Let
F
t
= [ f
1,t
, ..., f
n,t
] be the sequence of features at time t
and n the number of features, the model uses the pre-
vious m sequences of features to predict the vector F
t
.
The first two features of each vector of features cor-
responds to the position of the vehicle. In this part
we are just interested in predicting only the next posi-
tion of the vehicle, thus there is no need to predict all
features.
3.2.2 Prediction of a Sequence of Points
To predict a sequence of positions T ( trajectory to
be predicted), we first start by predicting the first next
point (x
t
, y
t
) of the trajectory by predicting F
t
. As in
the previous case the model takes the previous m se-
quence of the feature as input to perform the predic-
tion. To predict the position (x
t
, y
t
) of a vehicle, the
model takes a sequences of features as input, for this
reason and in order to be able to predict the following
position (x
t+1
, y
t+1
) of the vehicle, the model predict
the sequence F
t
of features.
The predicted sequence of features F
t
and the last
m −1 sequences of features are given to the model
as input to predict the following sequence F
t+1
which
contains the point (x
t+1
, y
t+1
) of the trajectory
ˆ
T , this
step is repeated till we predict all points of the trajec-
tory. The disadvantage of this technic is that the error
made on predicting F
t
will affect the prediction of the
next sequence of features F
t+1
thus it will affect the
prediction of (x
t+1
, y
t+1
).
4 EXPERIMENT
In this section we use the 3/4 of the database to train
the model and the remaining data is used as valida-
tion set. Datasets with different time windows size
were constituted. In this part we compare the model
performances by varying time window size and the
number of features used to train the model, for both
trajectory prediction and intention prediction. For in-
tention prediction we study the model performances
according to time to intention occurrence.
4.1 Data Collection
Our model use data collected from the driving simu-
lator CARLA (A. Dosovitskiy and V. Koltun, 2017).
CARLA is an open source software developed by
Alexey Dosovitski and al. at the computer and vi-
sion center of Barcelona. The CARLA simulator use
a virtual environment which represents maps of vir-
tual towns. These maps use a cartesian coordinate
An Effective Driver Intention and Trajectory Prediction for Autonomous Vehicle based on LSTM
1093
system which allows us to locate vehicles and get its
positions in time. Data collection code have been run
on the town 01 of CARLA which contains two, three
and four ways intersections, red lights and some trafic
signs.
Several vehicles have been spawned on the town
01 of CARLA, with an autopilots which generates the
trajectory of each vehicle and follow it. Vehicle’s data
is collected for a constant time step of 0.1 s in other
words data is collected at a frequency of f
s
=10 Hz.
Only data corresponding to intentions that we are in-
terested in is stored.
4.2 Model Selection and Feature
Selection
To evaluate the model performances, several compar-
isons were done on the model trained on different
time window size and different number of features to
select those that give the best performances.
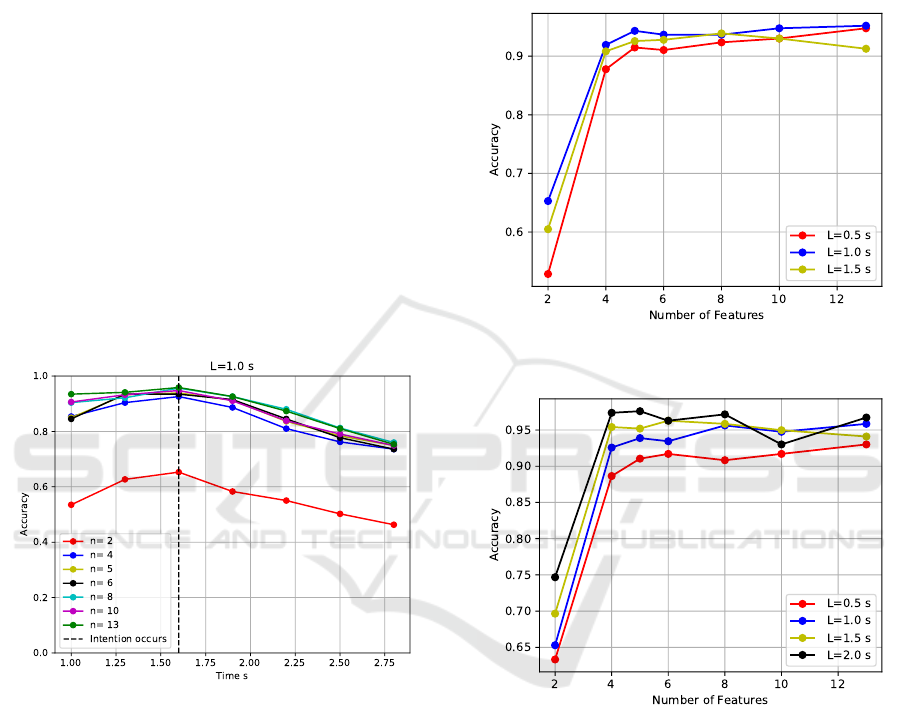
Figure 4: Accuracy of the model trained on time window of
1 s vs time, for different number of features n.
Figure 4 illustrates the accuracy of the model for dif-
ferent time to intention occurrence, for a time win-
dow of size L=1 s. We can observe that the model
trained on n = 5 features which are the positions, the
velocity and the directional tilt angle of the vehicle,
and the model trained on n = 13 features, which con-
tains some road characteristics like trafic light and the
type of the road at a given distance, have almost the
same the performances. The accuracy of each model
depends on the time to intention occurrence and the
number of features. We can observe on this figure
that if the model is trained just on the vehicle posi-
tions as features (n = 2) its accuracy become weak,
while when the model is trained on more features its
performances become better.
The accuracy of intention prediction increase
when time to intention occurrence decreases despite
the number of features. After the intention occur-
rences and the end of its maneuvering, the accuracy
decrease which is normal because we didn’t give the
model the following intentions labels.
Figure 5: Intention prediction: Model accuracy vs the num-
ber of feature.
Figure 6: Intention recognition: Model accuraracy vs the
number of feature.
Figure 5 and figure 6 show respectively the accuracy
of the model for intention prediction and intention
recognition, where the model was trained on differ-
ent time window size for different number of features.
We can observe that intention recognition performs
better with long time window, where the accuracy can
reach 97% for a time window of 2 s, while for in-
tention prediction the accuracy reach 96% for a time
window of 1 s.
Figure 7 illustrates the accuracy of the trajectory
prediction model for one point prediction, for differ-
ent time window size. Curves show that the model
performs better with small set of features and long
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
1094
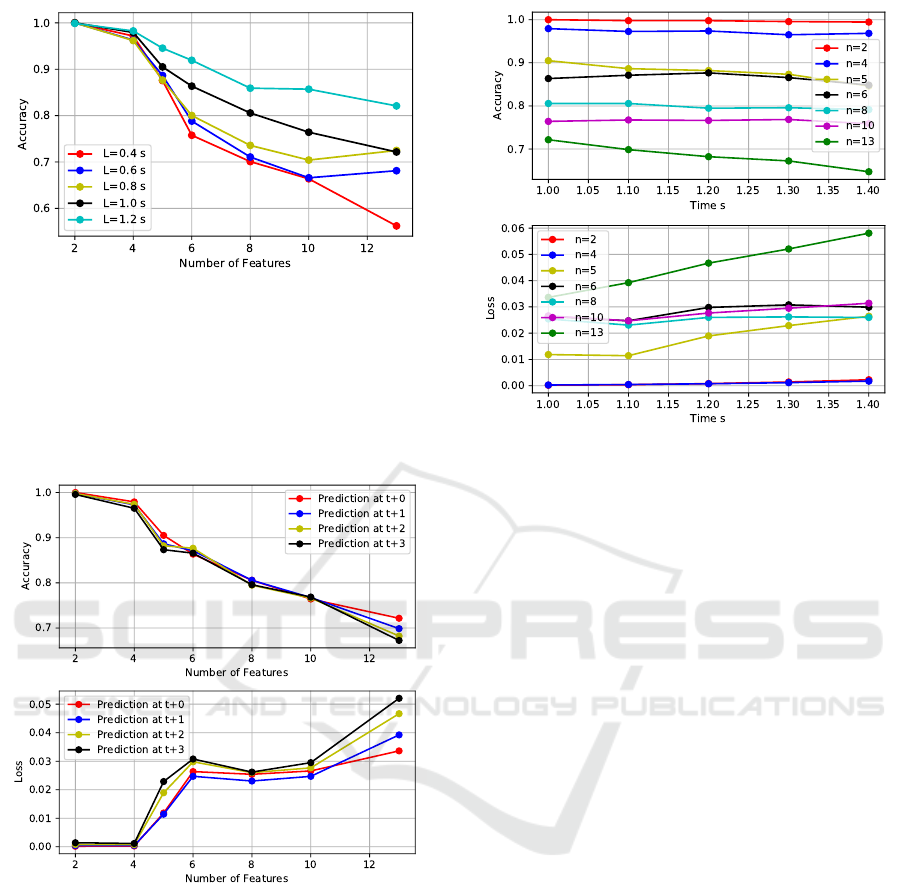
Figure 7: Prediction of one point of the future trajectory:
model accuracy vs the number of feature, for different time
window size L..
time window. We have an accuracy of 99.9% for the
model trained only on vehicles positions (number of
features n = 2), when the number of features increases
the accuracy of the model decreases.
Figure 8: Trajectory prediction: model accuracy and loss vs
n the number of features , for a time window of L=1 s..
Figure 8 present the accuracy of the model, where we
predict a sequence (x
t
, y
t
), (x
t+1
, y
t+1
),... of future po-
sitions that constitute the predicted trajectory
ˆ
T . By
observing the figure 8, we can conclude that the tra-
jectory prediction accuracy decreases when the num-
ber of features increases which is normal due to errors
made on features prediction. When the number n of
features is high, it become difficult to predict all of
those features without making errors.
Figure 9 illustrate the accuracy of the model at
each step (prediction of a sequence of features) of the
trajectory prediction, which is the accuracy variation
according to time of prediction. We can observe that
Figure 9: Trajectory prediction: model accuracy and loss vs
time of prediction, for a time window of L=1 s..
the error made on predicting the sequence F
t
at each
time t in the process of trajectory prediction doesn’t
affect that much the performances of the prediction
model. The accuracy is almost stable for low num-
ber of features while for high number of features the
accuracy decreases slowly with time.
5 CONCLUSIONS
In this paper, we propose a method for driver inten-
tion prediction and recognition, and a method for tra-
jectory prediction. With only a small set of features (4
or 5 features), this method gives high accuracy hence
it performs in real time unlike the methods proposed
in state of art, where a plenty of complex features are
used to get good performances, which makes them
greedy in term of computational time. This method
will prevent collisions occurrence, whether it is used
by a self-driving vehicle system or an ADAS sys-
tems. Trajectory prediction can be used for inten-
tion prediction where the predicted trajectory and fea-
tures will be given as input to the intention prediction
model to perform the intention prediction. We have
shown in this paper that modeling this problem of
prediction leads us to select the right features, which
increases our model performances. Our feature se-
lection method makes the model perform better with
small dataset. By introducing the directional tilt an-
gle of the vehicle as a feature our model performances
increases. The proposed method gives an accuracy of
97% for intention recognition and an accuracy of 96%
on intention prediction, whereas other work gets in
An Effective Driver Intention and Trajectory Prediction for Autonomous Vehicle based on LSTM
1095

general 95% or less. The trajectory prediction model
gives an accuracy of 99.9% just by using vehicle’s po-
sitions and it gets 98% when the number of features
is equal to 4. Thus for trajectory prediction when the
number of predicted features increases the accuracy
of the model decreases. This work will be extended
to predict intentions at a roundabout and to predict the
lane change intention, where the database will be up-
dated with data coming from driver behavior for these
intentions maneuvering.
REFERENCES
A. Dosovitskiy, G. Ros, F. C. A. L. and V. Koltun, C. (2017).
Carla: An open urban driving simulator. 1st Confer-
ence on Robot Learning.
A. Zyner, S. W. and Nebot, E. (2018). Naturalistic driver in-
tention and path prediction using recurrent neural net-
works. IEEE Transactions on Intelligent Transporta-
tion Systems.
B. Tang, S. Khokhar, R. G. (2015). Turn prediction at gen-
eralized intersections. IEEE Intelligent Vehicles Sym-
posium (IV).
D. P. Kingma, J. Lei Ba, A. (2015). A tutorial on
mpeg/audio compression. ICLR.
Derek J. Phillips, T. A. W. and Kochenderfe, M. J. (2017). A
tutorial on mpeg/audio compression. IEEE Intelligent
Vehicles Symposium (IV).
Djuric, N. and al. (2019). Multimodal trajectory predictions
for autonomous driving using deep convolutional net-
works. IEEE International Conference on Robotics
and Automation (ICRA).
Hao Xue, D. Q. H. and Reynolds, M. (2018). Ss-lstm:a
hierarchical lstm model for pedestrian trajectory pre-
diction. IEEE Winter Conference on Applications of
Computer Vision.
Hou, H. and al. (2011). Driver intention recognition method
using continuous hidden markov model. International
Journal of Computational Intelligence Systems, 4.
Laugier, C. and al. (2011). Probabilistic analysis of dynamic
scenes and collision risks assessment to improve driv-
ing safety. IEEE Intelligent Transportation Systems,
3:4–19.
L.R Rabiner, B. J. (1986). An introduction to hidden
markov models. IEEE ASSP Magazine, 3:4–16.
Sepp Hochreiter, J. S. (1997). Long short-term memory,
neural computation. IEEE Multimedia, 9:1735–1780.
Streubel, T. and Hoffmann, K. H. (2014). Prediction of
driver intended path at intersections. IEEE Intelligent
Vehicles Symposium (IV).
Zhang, Y. and al. (2018). Integrating kinematics and en-
vironment context into deep inverse reinforcement
learning for predicting off-road vehicle trajectories.
2nd Conference on Robot Learning.
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
1096
