
Distributed Framework for Reversible Merging of Heterogeneous
Robot Maps
Ilze Andersone
a
Riga Technical University, Kalku Street 1, Riga, Latvia
Keywords: Multi-robot Systems, Robot Map Merging, Heterogeneous Robot Maps, Occupancy Grids.
Abstract: Studies have shown that multi-robot mapping has the benefit of faster environment exploration when
compared to single robot mapping. However, when multiple robots explore the environment simultaneously,
a new problem arises – how to merge the individual robot maps. While there are many map merging methods
developed for homogeneous maps, heterogeneous robot map merging is still a new research area. Another
relatively little researched aspect of map merging is how to deal with an error in the map merging decision.
This paper proposes a map merging framework for the distributed merging of heterogeneous robot maps and
offers two approaches for the further mapping with an emphasis on map merging process reversibility.
1 INTRODUCTION
The environment mapping is a fundamental problem
in the mobile robotics. When multiple robots explore
the environment simultaneously, it is possible to
speed up the mapping process by sharing the maps
between the robots. If the maps are shared, then the
map merging problem must be solved: the match
between the maps must be found and the maps must
be fused together.
Many researchers have dealt with the map
merging problem from the perspective of the map
matching – the search of transformation between the
two source maps. Some examples of such research are
occupancy grid matching (Ko et al, 2003; Carpin,
2008; Li et al, 2012; Liu et al, 2013), feature map
matching (Lakaemper et al, 2005; Dinnissen et al,
2012), and grid-based map matching (Dedeoglu and
Sukhatme, 2000; Bonanni et al, 2017).
However, only few have addressed the problem
of merging heterogeneous maps, which are defined in
(Andersone, 2019) as “two maps are considered to be
heterogeneous in respect to one another, if their
representations of the same environment part are
different, and the differences are caused at least
partially by the robot mapping system (such as map
format, map scale or used sensors)”.
a
https://orcid.org/0000-0003-1711-9393
Mostly the heterogeneous map merging research
considers the matching of different resolution
occupancy grid maps (Topal et al, 2010; Park et al,
2016). Besides heterogeneous occupancy grid
matching, most other research addresses the fusion of
sparse/dense 3D point clouds, or fusion of a robot
map with prior CAD map (Andersone, 2019).
However, these methods only address specific
map merging steps, but do not consider the
heterogeneous map merging problem as a whole.
Besides the necessity for the appropriate matching
and fusion algorithms there are several additional
aspects that should be considered when merging
heterogeneous maps: such as distributed merging,
decision making about merging attempt, choice of the
map merging method and map quality considerations.
These are addressed in the development of the
proposed map merging framework.
Another little researched aspect of map merging
is the map merging reversibility – a process that
includes dealing with errors in map merging decision.
Some proposed solutions are multi-level map storage
where multiple maps are maintained simultaneously
(Huang and Beevers, 2005, Andersone and
Nikitenko, 2014) or arranging robot meetings to
confirm map merging decisions (Ko et al, 2003).
These are valid solutions, but multiple map
maintenance can be computationally costly, and the
relative position determination is impossible if the
422
Andersone, I.
Distributed Framework for Reversible Merging of Heterogeneous Robot Maps.
DOI: 10.5220/0010342404220430
In Proceedings of the 13th International Conference on Agents and Artificial Intelligence (ICAART 2021) - Volume 1, pages 422-430
ISBN: 978-989-758-484-8
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

necessary sensors are unavailable. Therefore, a way
to discard the data integrated from the other robot
without maintenance of multiple maps can be
beneficial, if it is possible without losing significant
data acquired after the map merging.
This paper proposes a map merging framework
for distributed and reversible merging of
heterogeneous robot maps. The most important
contributions of this paper are the following two:
This paper proposes a general map merging
framework for distributed and reversible
merging of heterogeneous robot maps.
A special emphasis is put on the reversibility of
the map merging decision. To address this
problem, two approaches how to proceed with
the mapping are offered. For each approach,
both the way to recognize the merging failure
and the approach to exclude the other robot
map’s data is proposed.
The rest of the paper is organized in the following
way. Section 2 gives an overview of the proposed
framework and its main components. Section 3
describes the proposed approaches for further
mapping along with similarity metrics for map
merging error detection. Section 4 is dedicated to the
presentation of the experimental results. Section 5
contains Discussion about the findings, and Section 6
concludes the work and outlines the future work.
2 THE PROPOSED MAP
MERGING FRAMEWORK
To address the problem of reversible and distributed
merging of heterogeneous robot maps, a map merging
framework is proposed with the main steps listed in
Figure 1:
1. Decision making about the map merging
attempt (described in section 2.1);
2. Map matching – the search for transformation
between the maps (described in section 2.2);
3. Map fusion – the incorporation of the other
robot’s map data in the current map if the
matching is successful (described in section
2.2);
4. Further mapping with periodic verification –
the mapping is continued, and it is periodically
checked whether the similarity of merged
maps is still high enough (described in section
2.3);
5. Discarding of the other robot’s map data
(implementation of reversibility) – if the error
in merging is discovered, the other robot’s
map data or part of it is discarded (described
briefly in sections 2.3 and Section 3 in more
detail).
Figure 1: The main steps of the map merging framework.
2.1 Decision Making about the Map
Merging
Depending on the metadata (map types, relative
positions, exchanged data) an appropriate procedure
is chosen for the matching and fusion, or the merge is
rejected if such procedure is not available.
To make a merging decision, a decision table can
be created, where the appropriate procedures for
various parameters are listed. The priority of the
chosen procedure can be determined by the order of
the records in the table, or a priority value may be
assigned to each record. If there is no record in the
table that corresponds to the received metadata, then
the map merging attempt is rejected.
2.2 Map Matching and Fusion
To ensure the distributedness of the map matching
and fusion process, the map matching and fusion must
Distributed Framework for Reversible Merging of Heterogeneous Robot Maps
423
be performed by each robot separately, i.e. the map
from the other robot is fused in the current robot map,
assuming that the map matching is successful. The
robots must be capable of exchanging metadata and
the map data at least once during the mapping.
It should be noted that various algorithms can be
used for both map matching and map fusion
depending from several factors (identified in
(Andersone, 2019): representations of both maps,
mapping algorithm employed by the robot, data and
knowledge about robot’s relative positions. A
detailed review of both homogeneous and
heterogeneous map matching and fusion algorithms
can be found in (Andersone, 2019).
In the case of heterogeneous maps, the integration
of data from lower quality map can decrease the
quality of the higher quality map. To reduce this
problem, the map fusion should take into account the
quality of individual maps by using quality evaluation
methods such as one in (Andersone, 2020).
2.3 Further Mapping and Reversibility
After the map matching and fusion step each robot
continues the exploration independently. During the
continued exploration process the robots should be
able to identify whether the merged maps are still
consistent, or an erroneous fusion has been
performed.
An error the map fusion can happen if a wrong
match of similar environment areas is found between
the two maps. Such errors most often happen when
the environment contains many similar areas (e.g.
similar length and width corridors).
There are two approaches proposed for the further
mapping after the map merging decision is made
(described in more detail in Section 3): further
mapping with multiple maps and further mapping
with a single map.
3 PROPOSED APPROACHES
FOR MERGING
REVERSIBILITY
To support the map merging reversibility two
approaches are proposed:
Further mapping with multiple maps (multi-
level mapping) similarly to (Huang and
Beevers, 2005, Andersone and Nikitenko,
2014). The concept of this approach is
described in Section 3.1.
Further mapping with a single map (described
in Section 3.2). In this case, algorithms must
discard the other robot’s data from the merged
map, if the error in merging is found.
Additionally, the use of two metrics to detect map
merging error are proposed in Section 3.3.
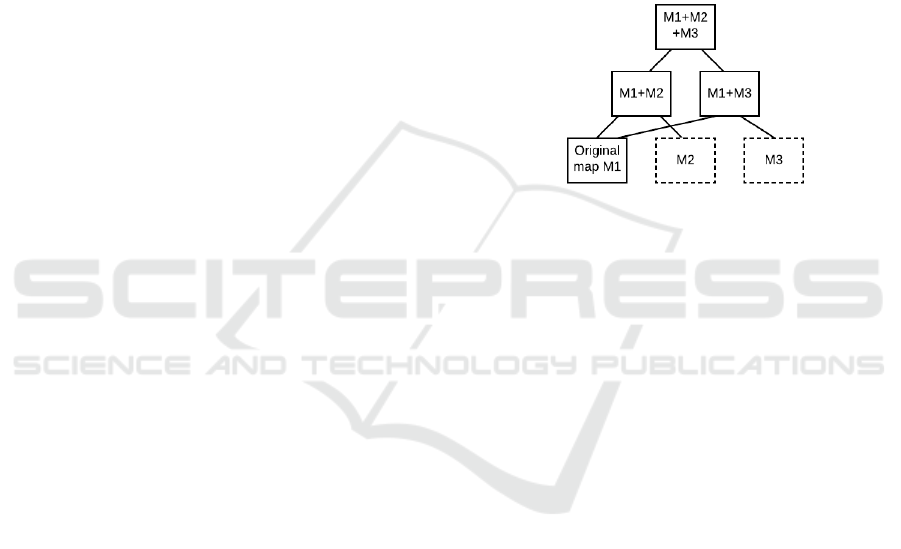
3.1 Mapping with Multiple Maps
The further mapping with multiple maps maintains
separate maps for all updates after map fusion both
for map before merging and after merging (see Figure
2). Additionally, the other maps can be stored for
repeated merging if necessity arises.
Figure 2: Multi-level mapping map hierarchy with 3 maps.
Continuous lines represent updated maps; dashed lines
represent maps, which are stored but not updated.
Mapping with multiple maps has the advantage of
simple recovery from a wrong map merging. If the
dissimilarity is identified, then the merged map can
be discarded without losing any data collected after
the fusion, and only the original map is further
updated. The main drawback of the multi-level
mapping is the necessity to maintain multiple maps at
once, which can be computationally costly.
3.2 Mapping with Single Map
The mapping with single map updates only one map,
which is the fusion of all merged maps. This approach
has the advantage that only one map is updated, and
the computational cost remains manageable.
The main problem with this approach is the
restoration of the original map if the map merging
error is discovered and the discovery of such errors.
To address this problem for occupancy grids, the
author proposes to introduce a local update map (see
Figure 3), where the cells updated at least once by the
robot are marked. Together with original merged
maps, it is easy to determine, which regions have been
affected exclusively by the map whose data should be
discarded due to wrong merging.
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
424

Figure 3: Single-map mapping. Only the merged map and
local update map is maintained.
It is not a perfect solution due to some remaining
data of the wrong merging in areas visited by the
robot, but most often these traces are relatively
insignificant, because the merging decision was made
when the overlap of the maps had high similarity and
the differences were discovered later in the further
mapping.
3.3 Metrics for Map Merging Error
Detection
For the detection of map merging error use of two
metrics is proposed: map similarity metric (SM) and
map distance metric (DM).
The similarity metric SM from (Birk and Carpin,
2006) counts the similar and dissimilar cells in the
common parts of the maps to calculate the overall
similarity of the map (Equation 1).
𝑆𝑀
𝑠𝑖𝑚𝑖𝑙𝑎𝑟_𝑐𝑒𝑙𝑙𝑠
𝑠𝑖𝑚𝑖𝑙𝑎𝑟_𝑐𝑒𝑙𝑙𝑠 𝑑𝑖𝑠𝑠𝑖𝑚𝑖𝑙𝑎𝑟_𝑐𝑒𝑙𝑙𝑠
(1)
The main drawback of the similarity metric is that
it only considers whether the cells have the same
value (‘occupied’ or ‘free’), but doesn’t take into
account the distance to the closest same value cell in
the other map in the case of dissimilarity. This is
especially problematic if the maps are heterogeneous
and have significant local differences even when the
map merging is performed correctly. Another
problem is the relatively low impact of occupied cells,
which are generally much lower in count.
Another metric in (Birk and Carpin, 2006) based
on distance maps is proposed to aid in the heuristic
search process for map transformations. The map
distance metric DM represents the average Manhattan
distance to the nearest same value cell in the other
map. It is calculated by first creating four distance
maps representing the Manhattan distances to free or
occupied cells in both maps (Figure 4), and then
calculating the average distances between the
significant cells. The occupied cell and free cell
metrics are calculated separately and then summed,
which gives the same weight for free and occupied
cells disregarding their total count.
The map distance metric allows to distinguish
between small and large transformation errors, but it
was created to help in the search process and not to
evaluate the map similarity (Birk and Carpin, 2006).
To adapt the metric for similarity evaluation, a new
step was added – marking of unknown cells (Figure
4.d). Instead of calculating the distance to the nearest
same value cell in the other map for all cells, only the
distances that have significant (not ‘unknown’) value
in both maps are considered.
Figure 4: The main steps of the modified distance map
calculation.
4 EXPERIMENTAL RESULTS
To demonstrate the heterogeneous map merging
process and the merging reversibility, an example
was implemented with the following assumptions:
The robot maps are occupancy grid maps of the
same environment, and these occupancy grids
have different resolutions. Occupancy grids
represent the environment as an array, where
each cell represents the probability that the
corresponding environment area is occupied by
an obstacle.
The environment maps are globally accurate
(Schwertfeger and Birk, 2013): the features are
accurately positioned in the global reference
frame. There may be local inaccuracies in
individual maps.
4.1 The Map Matching and Fusion
Algorithms
For the map matching the occupancy grid algorithm
developed by Carpin (Carpin, 2008) was
implemented and used. It was chosen because it is
fast, deterministic, and well suited for the matching
of indoor environment maps. For the maps of
Distributed Framework for Reversible Merging of Heterogeneous Robot Maps
425

different resolution, a map resolution transformation
was performed before the merging.
The maps were fused by Binary Bayes filter cell
update algorithm (Thrun, 2005) with a quality
evaluation method from (Andersone, 2020).
Depending on the quality differences of both map
regions, the Binary Bayes filter update is applied 0-3
times. An example of one map merging attempt is
shown in Figure 5.
Figure 5: An example of a map merging result.
4.2 Data Generation and Experimental
Setup
For the experiments, the map data from the Pre-2014
Robotics 2D-Laser Dataset was used
(http://www.ipb.uni-bonn.de/datasets/) (Haehnel, D).
Maps were updated with a Binary Bayes filter scan
update (Thrun 2005) (the positions are available in
the corrected log files).
From the log files partial maps of two different
resolutions were generated: 7x7cm and 10x10cm
resolutions (further referred to as 0.07 and 0.1
resolutions). Each individual partial map was
generated from 30 consecutive scans with a random
starting point. The map data from (Haehnel, 2003)
contains places that are visited several times, so the
same area with slight differences can be generated
from different scans contributing to heterogeneity of
the maps.
Map merging attempts with three different
resolution combinations were performed: 0.07-0.07,
0.07-0.1 and 0.1-0.07. For each resolution
combination, 20 map mergings were performed with
successful results (correct transformation) and 20
mergings with failed results (wrong transformation).
All mergings had map similarity metric threshold of
0.9 (only results with higher than 90% similar cells
were accepted).
After the map merging, the mapping was
continued by integrating the next 10 scans in either
the merged map (case of further mapping with one
map) or both merged and original map (case of further
mapping with multiple maps).
For each map merging attempt, the similarity
metric (SM) and distance metric (DM) was calculated
both before and after the integration of the additional
10 scans that represent the further mapping:
In the case of further mapping with multiple
maps both metrics are calculated between the
original map and the other robot’s map.
In the case of further mapping with single map
both metrics are calculated between the merged
map and the other robot’s map (as the updated
original map is not available).
The goal of similarity metric calculations is to
determine whether failed merging cases can be
correctly identified and reversed.
4.3 Map Merging Results
The acquired map merging results are summarized in
the Tables 1-3. Each value in all tables represents the
average value from 20 merging attempts. The average
metric values both for mapping with single map (1M)
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
426
and two (multiple) maps (2M) are given. The same
partial map sets are used for both cases, so that the
results of map update times are comparable.
Table 1: The similarity metric (SM) and distance metric
(DM) evaluations for 0.07-0.07 resolution maps.
Correct
(
1M
)
Correct
(
2M
)
Wrong
(
1M
)
Wrong
(
2M
)
Initial SM 0,995 0,979 0,990 0,923
End SM 0,986 0,977 0,974 0,910
Initial DM 0,419 1,251 2,485 14,950
End DM 0,883 1,462 5,006 14,570
U
pd
. time 6,816 10,516 9,512 12,289
Table 2: The similarity metric (SM) and distance metric
(DM) evaluations for 0.07-0.1 resolution maps.
Correct
(
1M
)
Correct
(
2M
)
Wrong
(
1M
)
Wrong
(
2M
)
Initial SM 0,992 0,970 0,991 0,913
End SM 0,982 0,968 0,970 0,896
Initial DM 0,329 1,229 2,202 14,604
End DM 0,754 1,702 4,532 14,656
U
p
d. time 7,384 10,709 9,221 12,600
Table 3: The similarity metric (SM) and distance metric
(DM) evaluations for 0.1-0.07 resolution maps.
Correct
(1M)
Correct
(2M)
Wrong
(1M)
Wrong
(2M)
Initial SM 0,989 0,966 0,994 0,909
End SM 0,973 0,956 0,976 0,864
Initial DM 0,518 1,313 2,055 9,979
End DM 1,094 1,678 3,298 10,249
Upd. time 3,395 5,106 4,757 6,321
It can be observed in Tables 1-3 that the average
values of the similarity metric are higher (better) for
the mapping with single map, and the average
distance metrics are higher (worse) for the mapping
with two maps. These results were expected and show
higher similarity for the mapping with single map,
because the metrics are calculated for the other
robot’s map and the merged map, in which the other
robot’s map is already integrated. These differences
demonstrate that the similarity and distance metrics
should be evaluated in the context of the chosen
further mapping approach – single map approach
requires higher similarity values.
The update time comparison in Tables 1-3 show
that the map updates with two maps on average take
longer than the map updates with one map, which
illustrates the point that multi-level map maintenance
is more computationally costly than single map.
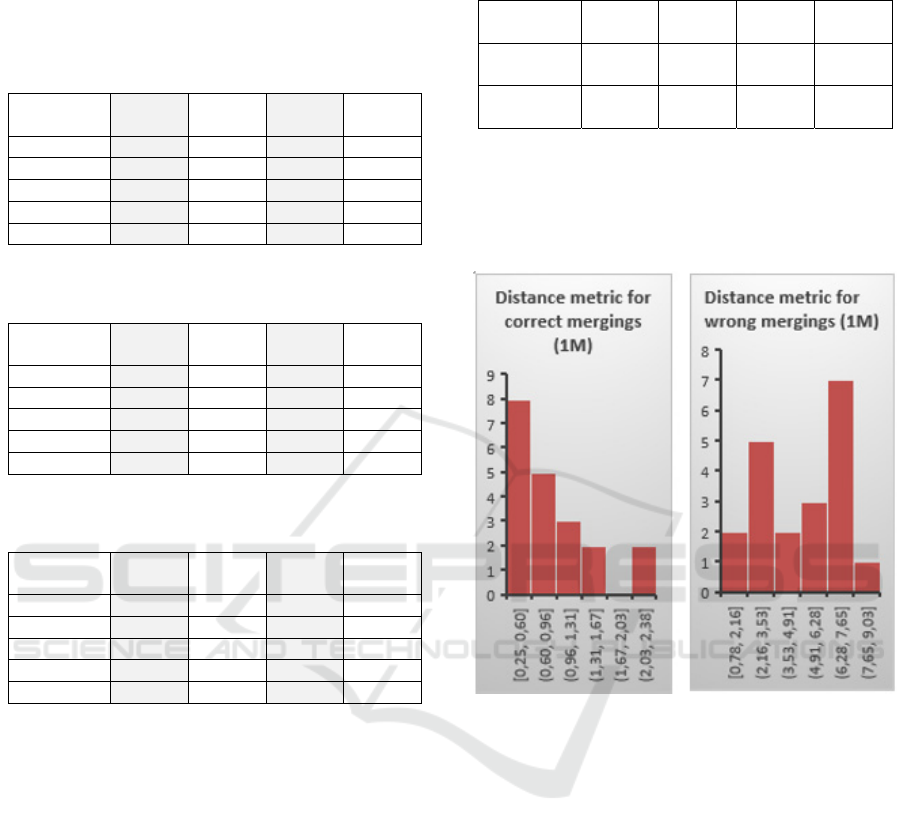
Table 4 represents the ranges of similarity and
distance metrics at the end of the further mapping for
both mapping approaches.
Table 4: Similarity and Distance metric ranges for 0.07-
0.07 maps after the further mapping.
Correct
(
1M
)
Wrong
(
1M
)
Correct
(
2M
)
Wrong
(
2M
)
End SM 0,964-
0,999
0,945-
0,996
0,954-
0,999
0,853-
0,956
End DM 0,248-
2,382
0,784-
9,029
0,270-
4,545
3,874-
20,946
It can be seen in Table 4 that both similarity (SM)
and distance metric (DM) ranges for correct and
wrong merges have low overlap for the mapping with
multiple maps (2M), and both metrics can be used for
map merging error detection.
Figure 6: Distance metric histograms for 0.07-0.07 maps
after the further mapping with single map.
On the other hand, similarity metric ranges are
very similar for single map mapping (1M) and
therefore are not useful for the identification of wrong
merges. Instead, the distance metric should be used
for the merging error detection (histograms of
distance metric distribution are shown in Figure 6.
While some false positives and/or false negatives
are present no matter the distance metric threshold,
wrong mergings can be identified relatively
accurately when compared to the use of similarity
metric.
To show the differences between the single and
multi-level mapping reversibility, illustrative
example is given in Figures 7-9. Figure 7 shows the
original maps and their merging result, which is
wrong but exceeds the acceptance threshold of 95%
same value cells. The resolution of the maps M1 and
M2 are 0.07 and 0.1.
Distributed Framework for Reversible Merging of Heterogeneous Robot Maps
427

Figure 7: Example of the original maps and the merging
result. Top: Map1 and Map2; Bottom left: The merging.
Figure 8 shows the two maps maintained by both
mapping approaches after the updates: multi-level
mapping updates both original and merged map while
single map approach only updates the merged map
(top map in Figure 8).
Figure 8: Example of the maintained maps for multi-level
mapping after the updates. Top: The original Map1 with
updates after the merging; Bottom: The Map1 and Map2
merging result with updates after the merging.
Figure 9 shows the resulting maps after the data
of M2 is discarded from the original map M1.
For multi-level approach (Figure 9 top part) that
means that the merged map is discarded and only
original map with updates is kept. For single map
approach (Figure 9 bottom part) the data of M2 is
discarded from the merged map – value of all the cells
not updated locally are reset to ‘unknown’.
It can be seen that the results are quite similar with
only some areas of the single mapping approach
containing corrupted data. This shows that the single
Figure 9: Comparison of the resulting maps without
merging (top) and after single map mapping and reversing
the merging (bottom).
map mapping approach is a valid alternative to the
maintenance of multiple maps if the latter is not
possible due to computational restrictions.
5 DISCUSSION
The experiments and case study shows that it is
possible to implement distributed and reversible
merging of heterogeneous robot maps within the
proposed framework.
While there is no universal solution for
heterogeneous map merging and the experiments
were performed with different resolution occupancy
grid maps, the framework can be used for any type of
heterogeneous map merging as long as the following
requirements are met:
It must be possible to match the chosen types
of maps. For that, map type-specific matching
algorithms are required, or the match may be
acquired by estimating the robot relative
positions.
It must be possible to fuse the chosen types of
maps. Specific algorithms must be developed
to fuse different types of heterogeneous maps.
If possible, then the quality evaluation of each
map should be considered when performing the
fusion. For occupancy grid map quality
evaluation and comparison an approach
proposed in (Andersone, 2019) can be used.
A method to discard the other robot’s data
without significant loss of data collected after
the merging should be available. If such a
method does not exist for the particular map
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
428

type and mapping algorithm, then the map
merging should only be performed when there
is a high certainty about its correctness. This is
especially important with heterogeneous maps,
where the chance of an incorrect match is
higher than for homogeneous maps.
6 CONCLUSIONS
In this paper a map merging framework for
distributed merging of heterogeneous robot maps and
a method for reversible map merging are proposed.
The experimental results with different resolution
occupancy grid maps demonstrate that the framework
can be successfully used for distributed and reversible
heterogeneous map merging.
The research can be continued by developing new
algorithms for the merging of other robot map types,
such as feature maps. For the heterogeneous
occupancy grid map merging the next research
direction is the adaptation of the proposed approach
for various mapping algorithms, such as particle filter
algorithms and graph-based algorithms.
Another area of further research is how to reliably
determine the thresholds for similarity and distance
metrics for both single and multiple map mapping
approaches so that minimal count of false positives
and false negatives is achieved. The main problem is
that these thresholds may vary as they depend on
resolutions and quality of the merged maps.
ACKNOWLEDGEMENTS
This work has been supported by the European
Regional Development Fund within the Activity
1.1.1.2 “Post-doctoral Research Aid” of the Specific
Aid Objective 1.1.1 “To increase the research and
innovative capacity of scientific institutions of Latvia
and the ability to attract external financing, investing
in human resources and infrastructure” of the
Operational Programme “Growth and Employment”
(No. 1.1.1.2/VIAA/1/16/030).
REFERENCES
Andersone I., Nikitenko A., 2014. Reliable multi-robot map
merging of inaccurate maps. In International
Conference on Practical Applications of Agents and
Multi-Agent Systems (PAAMS), pp. 13-24
Andersone I., 2019. Heterogeneous Map Merging: State of
the Art. MDPI Robotics, 8.3:74
Andersone I., 2020. Quality Evaluation of the Occupancy
Grids without Ground Truth Maps. In Proceedings of
the 12th International Conference on Agents and
Artificial Intelligence (ICAART), Vol.1, pp. 319-326
Birk A. and Carpin S., 2006. Merging occupancy grid maps
from multiple robots. Proceedings of the IEEE, vol. 94,
no. 7, pp. 1384-1397.
Bonanni T.M., Della Corte B., Grisetti G., 2017. 3-D map
merging on pose graphs. IEEE Robotics and
Automation Letters, 2, pp. 1031–1038.
Carpin S., 2008. Fast and accurate map merging for multi-
robot systems. Autonomous Robots, 25, no. 3, pp. 305-
316.
Dedeoglu G., Sukhatme G.S., 2000. Landmark-based
matching algorithm for cooperative mapping by
autonomous robots. Distributed Autonomous Robotic
Systems, 4, pp. 251–260.
Dinnissen P., Givigi S.N., Schwartz H.M., 2012. Map
merging of multi-robot slam using reinforcement
learning. In Proceedings of the 2012 IEEE
International Conference on Systems, Man, and
Cybernetics (SMC), Seoul, Korea, pp. 53–60.
Haehnel D., 2003. Intel Research Lab Robotics 2D-
Laserdata set. http://www.ipb.uni-bonn.de/datasets/
Huang W.H., Beevers K.R., 2005. Topological map
merging. The International Journal of Robotics
Research, 24, pp. 601-613.
Kang L., Ye P., Li Y., and Doermann D., 2014.
Convolutional neural networks for no-reference image
quality assessment. In Proceedings of the IEEE
conference on computer vision and pattern recognition,
pp. 1733-1740.
Ko J., Stewart B., Fox D., Konolige K., Limketkai, B.,
2003. A practical, decision-theoretic approach to multi-
robot mapping and exploration. In Proceedings of the
2003 IEEE/RSJ International Conference on Intelligent
Robots and Systems (IROS 2003), Las Vegas, NV,
USA, Volume 4, pp. 3232–3238.
Lakaemper R., Latecki L.J., Wolter D., 2005. Incremental
multi-robot mapping. In Proceedings of the 2005
IEEE/RSJ International Conference on Intelligent
Robots and Systems, Edmonton, AB, Canada, pp.
3846–3851.
Li H. and Nashashibi F., 2012. A new method for
occupancy grid maps merging: Application to multi-
vehicle cooperative local mapping and moving object
detection in outdoor environment. In Proceedings of the
2012 12th International Conference on Control
Automation Robotics and Vision, Guangzhou, China,
pp. 632–637.
Liu, Y.; Fan, X.; Zhang, H. A fast map merging algorithm
in the field of multirobot SLAM. Sci. World J. 2013,
169635.
Ma X., Guo R., Li Y., Chen W., 2008. Adaptive genetic
algorithm for occupancy grid maps merging. In
Proceedings of the 2008 7thWorld Congress on
Intelligent Control and Automation, Chongqing, China,
pp. 5716–5720.
Park J., Sinclair A.J., Sherrill R.E., Doucette E.A., Curtis
J.W., 2016. Map merging of rotated, corrupted, and
Distributed Framework for Reversible Merging of Heterogeneous Robot Maps
429

different scale maps using rectangular features. In
Proceedings of the 2016 IEEE/ION Position, Location
and Navigation Symposium (PLANS), Savannah, GA,
USA, pp. 535–543.
Schwertfeger S., and Birk A., 2013. Evaluation of map
quality by matching and scoring high-level, topological
map structures. In 2013 IEEE international conference
on robotics and automation, pp. 2221-2226.
Thrun S., Burgard W., Fox D., 2005. Probabilistic Robotics,
MIT Press: Cambridge, MA, USA.
Topal S., Erkmen D., Erkmen A.M., 2010. A novel map
merging methodology for multi-robot systems. In
Proceedings of the World Congress on Engineering and
Computer Science 2010, San Francisco, CA, USA,
Volume I, pp. 383–387.
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
430
