
Towards Repairing Scenario-Based Models with Rich Events
Guy Katz
The Hebrew University of Jerusalem, Jerusalem, Israel
Keywords:
Scenario-Based Modeling, Program Repair, Model Checking, Constraint Solvers, SMT Solvers.
Abstract:
Repairing legacy systems is a difficult and error-prone task: often, limited knowledge of the intricacies of
these systems could make an attempted repair result in new errors. Consequently, it is desirable to repair
such systems in an automated and sound way. Here, we discuss our ongoing work on the automated repair
of Scenario-Based Models: fully executable models that describe a system using scenario objects that model
its individual behaviors. We show how rich, scenario-based models can be model-checked, and then repaired
to prevent various safety violations. The actual repair is performed by adding new scenario objects to the
model, and without altering existing ones — in a way that is well aligned with the principles of scenario-based
modeling. In order to automate our repair approach, we leverage off-the-shelf SMT solvers. We describe the
main principles of our approach, and discuss our plans for future work.
1 INTRODUCTION
Modeling complex systems is a painstaking and dif-
ficult task. Even once a suitable model has been
created, and the system in question has been imple-
mented and deployed, the model may still need to be
changed as part of the system’s life cycle — for exam-
ple, if bugs are discovered, or if the specification of
the system is changed. This post-deployment altering
of systems and models, which we refer to as repair, is
a challenging undertaking: even if the desired change
is small, i.e. if it only affects a small portion of the
system’s operations, attempting a fix could have un-
desirable consequences. For example, dependencies
between various system components, which have not
been property modeled or documented, could make
changing one component affect other components in
unintended ways. This problem is typically com-
pounded by lack of knowledge — because the engi-
neers who developed the system are unavailable, or
have forgotten crucial details. Thus, as program re-
pair is frequently needed, we require formalisms and
tools that will allow us to automatically repair sys-
tems and models in a safe and convenient way.
One promising approach for tackling this dif-
ficulty is through modeling techniques that fa-
cilitate model repair. Scenario-Based Modeling
(SBM) (Damm and Harel, 2001; Harel and Marelly,
2003; Harel et al., 2012b) is a notable candidate that
fits this description. In SBM, systems are modeled
through the specification of scenario objects: objects
that represent individual behaviors of the system be-
ing modeled. Each of these objects describes either
behavior that the system should uphold, or behavior
that it should avoid. Although each object is only
tasked with governing a narrow aspect of the over-
all system behavior, the resulting model is fully exe-
cutable — i.e., the various objects can be composed
together and executed, in a way that achieves the over-
all system goals. This execution is performed by an
event selection mechanism, which is in charge of ex-
ecuting the objects simultaneously and synchronizing
them in a way that produces cohesive behavior. Stud-
ies have shown that SBM is nicely aligned with how
humans perceive systems, and that it consequently
fosters abstract programming (Gordon et al., 2012;
Alexandron et al., 2014).
Although SBM was designed as a general model-
ing framework, not particularly geared towards model
repair, prior work has shown its compatibility with
various formal analysis techniques, such as model-
checking (Harel et al., 2011) and automated re-
pair (Harel et al., 2014). This compatibility stems
from the fact that scenario objects in a scenario-based
(SB) model interact through the well defined interface
of the event selection mechanism, making it possible
to automatically construct a model of the full, com-
posite system, and then analyze it. Tools and tech-
niques have been devised to model-check and repair
safely and liveness violations in SB models (Harel
et al., 2011; Harel et al., 2011), to automatically
optimize and distribute these models (Harel et al.,
362
Katz, G.
Towards Repairing Scenario-Based Models with Rich Events.
DOI: 10.5220/0010373403620372
In Proceedings of the 9th International Conference on Model-Driven Engineering and Software Development (MODELSWARD 2021), pages 362-372
ISBN: 978-989-758-487-9
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reser ved

2013a; Harel et al., 2015a; Steinberg et al., 2017), and
to identify emergent properties thereof (Harel et al.,
2018).
Recently, it has been observed that while SBM
is well equipped for modeling reactive systems, it is
sometimes inadequate for modeling systems that han-
dle data — for example, robotics and autonomous ve-
hicle systems (Katz et al., 2019; Katz, 2020), which
involve various mathematical computations in addi-
tion to their reactivity. To this end, researchers have
extended the SBM principles, allowing the event se-
lection mechanism to support rich events, i.e. events
that carry various types of data. These enhancements
have proven quite useful for modeling more complex
systems, but are unfortunately incompatible with ex-
isting formal analysis and repair techniques for SBM,
which rely on the simplistic nature of the event selec-
tion mechanism. This has raised the following ques-
tion: are the automated analysis benefits afforded by
SBM limited to the simple models, or do these carry
over when SBM is used in richer settings?
Here, we begin to answer this question, by de-
vising analysis techniques for rich SBM. Specifically,
we focus on program repair: we show how, using ap-
propriate extensions, the automated repair techniques
proposed for SBM carry over when richer events are
introduced and more complex systems are modeled.
At the core of our proposed extension is the abil-
ity to automatically extract the underlying transition
graphs of SB models with rich events, through the
use of SMT solvers — a powerful family of auto-
mated solvers that can reason about first order logic
theories, such as arithmetic. We propose an SMT-
based method for constructing SBM transition graphs,
which effectively reduces sets of infinitely many pos-
sible events into a finite set of possibilities that need to
be explored. Although our work is focused primarily
on program repair, we believe it will allow the exten-
sion of other automated analysis techniques to the rich
SBM setting.
The rest of this paper is organized as follows. In
Section 2 we provide the necessary background on
SBM, and its extension to handle rich events. Next, in
Section 3 we present our core technique for automat-
ically extracting the underlying transition graphs of
SB models with rich events. We then show how this
technique enables us to automatically model-check
and repair SB models with rich events in Section 4.
We discuss related work in Section 5, and conclude in
Section 6.
2 BACKGROUND
2.1 Vanilla Scenario-Based Modeling
The multiple variants of SBM that have been pro-
posed typically include a set of scenario objects that
are run in parallel, and repeatedly synchronize with
each other. the most commonly used synchronization
idioms (Harel et al., 2012b) include:
1. requesting events: a scenario object can request
event e, indicating that it wishes that e be trig-
gered. Intuitively, e represents some desirable be-
havior that the system should now perform.
2. waiting-for events: a scenario object may wait-for
an event, i.e. state that it wishes to be notified
when that event is triggered. However, the object
does not actively request this event. The waiting-
for idiom is useful, for example, when an object
is waiting for some sequence of external events to
mark that it should perform some actions in re-
sponse.
3. blocking events: when a scenario object blocks
event e, it prevents the overall system from trig-
gering it — even if e was requested by another
object. Intuitively, this is how components can in-
dicate undesirable behavior, which the system is
forbidden from performing.
We refer to the SBM variant that consists of these id-
ioms as vanilla SBM, or vSBM, for short. in vSBM,
each scenario object defines a set of synchronization
points, and in each of these points it declares its sets of
requested, waited-for and blocked events. The event
selection mechanism collects these declarations from
all objects; selects for triggering one enabled event,
i.e. an event that is requested and not blocked; and
then informs all the objects that requested or waited-
for this event about the selection. These objects then
progress to their next synchronization point, and the
process is repeated as the execution continues.
A toy example, borrowed from (Harel et al.,
2014), is depicted in Fig. 1. The model that appears
therein belongs to a system that controls the water
level in a tank. Adding water can be done from ei-
ther a hot water tap or a cold water tap. The various
scenario objects are each depicted as a transition sys-
tem: the nodes represent the object’s synchronization
points, and they are labeled with the events that are re-
quested, waited-for and blocked in those points. The
scenario object ADDHOTWATER repeatedly waits for
WATERLOW events and requests three times the event
ADDHOT; and the scenario object ADDCOLDWATER
performs a symmetrical operation with cold water. If
Towards Repairing Scenario-Based Models with Rich Events
363
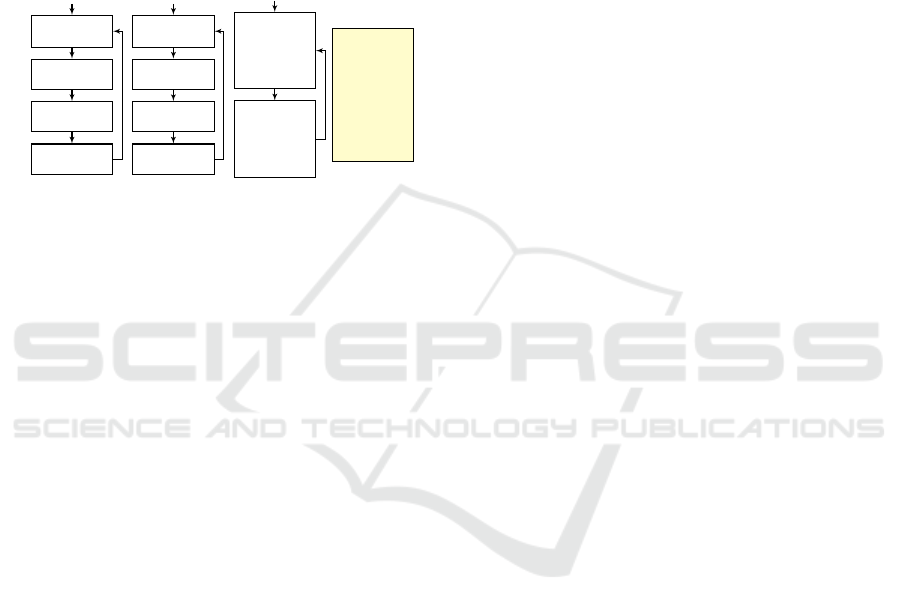
the model only includes these two objects, ADDHOT-
WATER and ADDCOLDWATER, the three ADDHOT
events and three ADDCOLD events may be triggered
in any order when the model is executed. If, for exam-
ple, we wish to maintain a steady water temperature,
we may add the scenario object STABILITY in order to
enforce the interleaving of ADDHOT and ADDCOLD
events, by using event blocking. The execution trace
of the resulting model (with all three objects) is de-
picted in the event log.
wait for
WATERLOW
request
ADDHOT
request
ADDHOT
request
ADDHOT
ADDHOTWATER
wait for
WATERLOW
request
ADDCOLD
request
ADDCOLD
request
ADDCOLD
ADDCOLDWATER
wait for
ADDHOT
while
blocking
ADDCOLD
wait for
ADDCOLD
while
blocking
ADDHOT
STABILITY
···
WATERLOW
ADDHOT
ADDCOLD
ADDHOT
ADDCOLD
ADDHOT
ADDCOLD
···
EVENT LOG
Figure 1: (From (Harel et al., 2014)) A scenario-based
model of a system that controls the water level in a tank
with hot and cold water taps.
We follow the definitions of (Katz, 2013), and for-
malize the vSBM framework as follows. Given some
finite event set E, we define a scenario object O as the
tuple O = hQ,δ,q
0
,R,Bi, where the interpretation of
the components is as follows:
• Q is a set of states. Each state represents a prede-
termined synchronization point.
• q
0
∈ Q is the initial state.
• R and B are mappings, R,B : Q → 2
E
. They map
states to set of events requested (R) and blocked
(B) at those states.
• δ : Q×E → 2
Q
is a transition function. It indicates
how the object reacts when an event is triggered,
i.e. if q
0
∈ δ(q,e) then the object can transition to
state q
0
when event e is triggered in state q.
We sometimes refer to this tuple as the underlying
transition graph of scenario object O.
The composite model specified by a set of sce-
nario objects is defined using a composition oper-
ator, which combines two scenario objects into a
single, larger scenario object, as follows. For two
scenario objects O
1
= hQ
1
,δ
1
,q
1
0
,R
1
,B
1
i and O
2
=
hQ
2
,δ
2
,q
2
0
,R
2
,B
2
i, both over a common event set
E, we define the composite scenario object O
1
k O
2
as O
1
k O
2
= hQ
1
× Q
2
,δ,hq
1
0
,q
2
0
i,R
1
∪ R
2
,B
1
∪ B
2
i,
where:
• The transition relation is defined element-wise,
i.e. h ˜q
1
, ˜q
2
i ∈ δ(hq
1
,q
2
i,e) if and only if ˜q
1
∈
δ
1
(q
1
,e) and ˜q
2
∈ δ
2
(q
2
,e).
• The labeling of a composite state is the union
of the element-wise labeling, i.e. e ∈ (R
1
∪
R
2
)(hq
1
,q
2
i) if and only if e ∈ R
1
(q
1
) ∪ R
2
(q
2
),
and e ∈ (B
1
∪ B
2
)(hq
1
,q
2
i) if and only if e ∈
B
1
(q
1
) ∪ B
2
(q
2
).
Finally, we define a behavioral model M as a collec-
tion of scenario objects O
1
,O
2
,... ,O
n
. The execu-
tions of M are then defined to be the executions of
the composite scenario object O = O
1
k O
2
k . .. k O
n
.
Each execution of M starts from the initial state of O,
and in each state q along the run it selects for trigger-
ing an enabled event, i.e., an event e ∈ R(q) − B(q)
(if no such event exists, the execution terminates in
a deadlock). Then, the execution moves to a state
˜q ∈ δ(q, e), and so on.
In practice, users very seldom describe models
by providing the transition graphs of their scenario
objects. Instead, SBM has been implemented in
a variety of tools, either as dedicated frameworks
(e.g., the Play-Engine tool for Live Sequence Charts
(LSC) (Harel and Marelly, 2003) or the Scenari-
oTools (Greenyer et al., 2017) engine), or on top
of popular programming languages, such as JavsS-
cript (Bar-Sinai et al., 2018), Python, Java (Harel
et al., 2010) and C++ (Harel and Katz, 2014). SBM
has been used in modeling complex systems, such
as robotic controllers (Elyasaf et al., 2019; Gritzner
and Greenyer, 2018), web-servers (Harel and Katz,
2014), smart buildings (Elyasaf et al., 2018), a nano-
satellite (Bar-Sinai et al., 2019), and cache coherence
protocols (Harel et al., 2016a).
2.2 Scenario-Based Modeling with Rich
Events
Although vanilla SBM has been successfully used in
various contexts, in recent years it was shown that it
may fall short in expressing various complex inter-
actions between scenario objects (Katz et al., 2019;
Katz, 2020; Elyasaf, 2020). Specifically, the sim-
ple event declaration mechanism — a finite set of
events E, and a finite set of requested, waited-for and
blocked events in every state, may be inadequate for
expressing more complex behaviors.
For example, consider a drone that needs to turn
left or right by a certain degree. Degrees are repre-
sented as real numbers, and an attempt to express this
using vanilla SBM would require either some loss of
precision, e.g. by discretizing the set of possible de-
grees; or the use of various hacks that circumvent the
SBM event selection mechanism, thus going against
the grain of SBM.
In line with the notions in (Katz et al., 2019), we
define rich SBM (rSBM) as follows: instead of dis-
MODELSWARD 2021 - 9th International Conference on Model-Driven Engineering and Software Development
364
crete events, the event set E now contains a set of
real-valued variables. Each scenario object can now
request that certain variables in E be assigned cer-
tain values, and block certain variables from being as-
signed other values. Event selection then consists of
choosing a variable assignment that satisfies at least
one request, and violates none of the blocked assign-
ments.
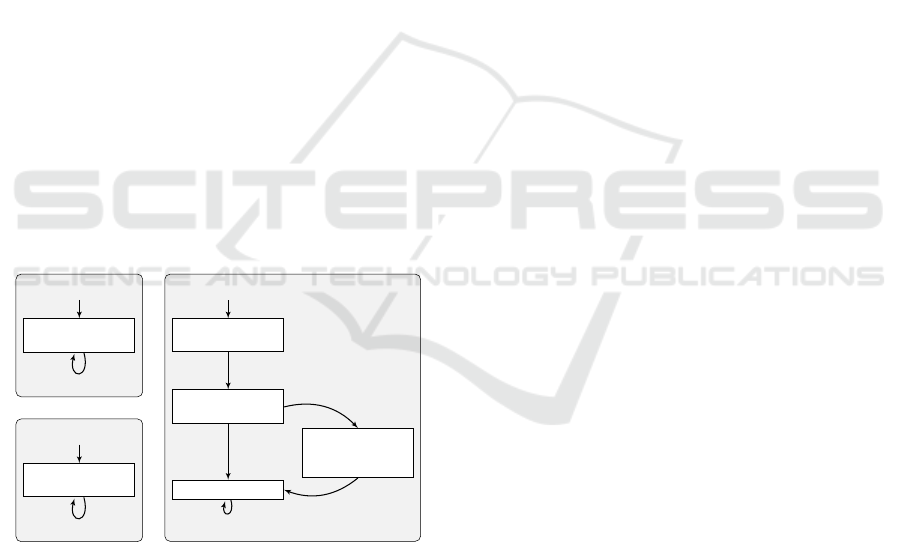
An example appears in Fig 2. The model depicted
therein belongs to a system controlling a drone. The
event set E contains two real variables, E = {v, h},
representing the vertical and horizontal angular veloc-
ities of the drone, respectively. Each round of event
selection assigns new values to these variables. Sce-
nario object 1 poses hard limits of v, due to mechan-
ical limitations in the drone; and scenario object 2
poses similar constraints on h. Scenario object 3, in
charge of navigating the drone to its destination, re-
quests an ascent at an angular velocity of at least 2
degrees per second (v ≥ 2), while not turning left or
right (h = 0). Afterwards, it requests a right turn at
10 degrees per second or more (h ≥ 10), while block-
ing the drone from changing altitude or turning left
(v 6= 0 ∨ h < 0). Depending on the actual right turn
that was performed, the object might request an ad-
ditional right turn at 10 degrees per second, this time
forcing the drone to turn by blocking all other possi-
ble assignments. Finally, the object reaches its goal
state, and requests nothing more.
Block
h ≤ −20 ∨ h ≥ 20
true
Block
v ≤ −5 ∨ v ≥ 5
true
Request
v ≥ 2 ∧ h = 0
Request h ≥ 10
Block v 6= 0 ∨ h < 0
v ≥ 2 ∧h = 0
Request true
h ≥ 10
Request h ≥ 10
Block
h < 10 ∨ v 6= 0
h < 10
h ≥ 10
true
OBJECT 1
OBJECT 2
OBJECT 3
Figure 2: A model for controlling a drone, comprised of
three scenario objects. Each state lists the requested and
blocked assignment for that state; and the transitions are
given as guard formulas, where a transition can be traversed
if and only if the triggered assignment satisfies the guard.
Observe that the model in Fig. 2 again depicts the sce-
nario objects as transition systems. Further, the edges
do not list the (possibly infinite) set of assignments
that trigger the transition, but instead list guard for-
mulas: an edge may be traversed only if the triggered
assignment satisfies the edge’s guard.
We formalize rich SBM as follows. The set E is
no longer a discrete set of events, but is instead a set of
real-valued variables E = {x
1
,... ,x
n
}. A scenario ob-
ject O is a tuple O = hQ,δ,q
0
,R,Bi, where Q is again
a set of states and q
0
∈ Q is an initial state. The label-
ing functions now map each state q ∈ Q into a first-
order, linear real arithmetic formula. Specifically,
these formulas can impose linear constraints on the
variables e.g., x
1
≥ 5 or x
2
+x
3
≤ x
4
, and can have ar-
bitrary Boolean structure: e.g., (x
1
≥ 5) → (x
2
+x
3
≤
x
4
∨ x
5
< 7). The transition function δ : Q × R
n
→ 2
Q
now defines how the state transitions for every possi-
ble assignment α that assigns a real value to each of
the variables x
1
,... ,x
n
.
For two scenario objects O
1
= hQ
1
,δ
1
,q
1
0
,R
1
,B
1
i
and O
2
= hQ
2
,δ
2
,q
2
0
,R
2
,B
2
i, both over a common
variable set E, we define the composite scenario ob-
ject O
1
k O
2
as O
1
k O
2
= hQ
1
× Q
2
,δ,hq
1
0
,q
2
0
i,R
1
∨
R
2
,B
1
∨ B
2
i. As before, the transition relation is de-
fined element-wise, i.e. h ˜q
1
, ˜q
2
i ∈ δ(hq
1
,q
2
i,e) if and
only if ˜q
1
∈ δ
1
(q
1
,e) and ˜q
2
∈ δ
2
(q
2
,e). The compos-
ite formulas that represent the requested and blocked
events are defined as the disjunctions of the element-
wise formulas: R
1
∨ R
2
(hq
1
,q
2
i) = R
1
(q
1
) ∨ R
2
(q
2
)
and B
1
∨ B
2
(hq
1
,q
2
i) = B
1
(q
1
) ∨ B
2
(q
2
).
The rich behavioral model M is now defined as a
collection of rich scenario objects O
1
,O
2
,... ,O
n
. The
executions of M are then defined to be the executions
of the composite scenario object O = O
1
k O
2
k . .. k
O
n
. Each execution of M starts from the initial state
of O, and in each state q along the run it selects for
triggering a variable assignment α, that satisfies the
formula
R(q) ∧ ¬B(q).
In other words, the selected assignment satisfies the
request of at least one component object, and does not
contradict the blocking declarations issued by any ob-
ject. Then, the execution moves to a state ˜q ∈ δ(q,α),
and so on.
In practice, the discovery of an assignment that
satisfies the given constraints can be performed us-
ing various automated solvers, such as LP or SMT
solvers (Harel et al., 2020). Because we restrict
our constraints to first-order, quantifier-free linear
real arithmetic, they can be resolved in polynomial
time (Barrett and Tinelli, 2018).
3 FORMALLY ANALYZING RICH
SCENARIO-BASED MODELS
Much work has been put into performing formal, au-
tomated analysis of SB models (e.g., (Harel et al.,
2011; Katz, 2013; Harel et al., 2018)). The cor-
Towards Repairing Scenario-Based Models with Rich Events
365

nerstone of these techniques is the automated ex-
traction of the underlying transition graph of an SB
model M = {O
1
,... ,O
n
} given in some high-level
language, such as C++. Intuitively, this is done in two
steps (Katz, 2013):
1. The underlying transition graph of each sce-
nario object O
i
is extracted independently, di-
rectly from its code. This process is performed by
iteratively exploring the object’s synchronization
points. Starting at the initial state q
0
, each non-
blocked event e ∈ E is triggered, and the object’s
reaction to e is recorded. If the object transitions
to some state q, then the edge q
0
e
→ q is added
to its transition graph. If q is a previously unvis-
ited state, it is added to a queue for later inspec-
tion. The process repeats until all possible events,
in all reachable states, have been considered and
mapped.
2. Once the transition graph for each scenario object
has been extracted, these graphs are composed
to produce the composite transition graph of M
(according to the composition operator defined in
Section 2).
A key point in this construction is that the event set
E is finite. In particular, in Step 1 this allows us to
exhaustively trigger each non-blocked event in each
state, and check how the object transitions. In order
to apply a similar technique to rSB models, this step
needs to be adjusted; specifically, in an rSB model,
the discrete set of enabled events is replaced with a
variable assignment, and because there are infinitely
many such assignments, enumerating them is impos-
sible. Step 2, on the other hand, remains unchanged
also when reasoning about rSBM, and can be applied
to construct the composite transition graph.
The method that we propose for extracting the
transition graph from a scenario object is as follows.
We make the observation that although there are in-
finitely many variable assignments that the object
needs to react to, these are typically grouped into a
finite number of possibilities that the object handles
in the same way. Consider, for example, the follow-
ing code snippet that defines a rich scenario object in
some high-level language:
sync ( request=(x < 5) );
if ( x ≥ 2 )
A();
else
B();
Here, the object synchronizes (using the sync key-
word) and requests that x be assigned a value less than
5. Then, when the synchronization call returns, i.e.
when x has been assigned a value smaller than 5, the
object performs A() if x ≥ 2, and B() otherwise. Thus,
there is no difference between x = 3 and x = 4, as far
as the underlying transition graph is concerned; in ei-
ther case, the object will transition into the same state
(the next synchronization point in A). Additionally,
the relevant predicates, i.e. (x ≥ 2) in this case, are
already available to us: we can find them by simply
parsing the code of the scenario object, and collecting
all the predicates that appear therein.
We thus propose the following approach. Given
a scenario object O in some high-level language, we
first parse its code and produce the set P
O
of all pred-
icates that appear in O — either as formulas within
its synchronization points, or elsewhere in the code.
Next, at every state q of O, we observe the power-set
2
P
O
, and for each element hϕ
1
,... ,ϕ
k
i ∈ 2
P
O
we use
an SMT solver to come up with a concrete assignment
for which ϕ =
V
k
i=1
ϕ
i
holds. If such an assignment α
exists, we trigger it at state q, and record
q
ϕ
→ q
0
in our transition graph. The full algorithm appears as
Alg. 1.
Algorithm 1: Extract Transition Graph(O).
1: P ← all predicates in O
2: Q.push(q
o
)
3: while Q not empty do
4: q ← Q.pop()
5: for hϕ
1
,... ,ϕ
k
i ∈ 2
P
O
do
6: ϕ ←
V
k
i=1
ϕ
i
7: α ← SMT(ϕ)
8: if α 6= ⊥ then
9: Invoke α in state q, mark new state as q
0
10: Add q
ϕ
→ q
0
to transition graph
11: if q
0
not previously visited then
12: Q.push(q
0
)
13: end if
14: end if
15: end for
16: end while
For soundness, we have the following lemma. The
proof, by induction on the path length, is straightfor-
ward and is omitted.
Lemma 1. Let M be an rSB model, and let G be its
transition graph constructed by Alg. 1. Then any ex-
ecution path q
0
,q
1
,... of M, either finite or infinite,
corresponds to a path s
0
,s
1
,... in G, and vice versa.
A natural concern is about the size of the power
set, 2
P
O
. We argue that this size is quite manage-
able: indeed, scenario objects tend to be short and
MODELSWARD 2021 - 9th International Conference on Model-Driven Engineering and Software Development
366
concise, as they deal only with specific aspects of the
system in question. Thus, spanning the individual
transition graphs should be doable, even for large sys-
tems. Of course, computing the composite transition
graph in Step 2 might suffer from the infamous state
explosion problem, which is common in verification.
Here, one possible solution is to break the model up
into sub-models, and reason about each of them sep-
arately; there exist techniques for doing this (Harel
et al., 2013a), but they are out of our scope here.
Example. Observe the following pseudo-code, which
represents Object 3 from Fig. 2:
sync ( request = (v ≥ 2 ∨ h = 0) );
sync ( request = (h ≥ 10), block = (v 6= 0 ∨ h < 0));
if ( h < 10 )
sync ( request = (h ≥ 10),
block = (v 6= 0 ∨ h < 10) );
sync ( request = (true) );
In this case, syntactically constructing the set P
O
yields:
P
O
= {v ≥ 2,h = 0,h ≥ 10, v = 0, h < 0}
(we do not need to consider a predicate and its nega-
tion, e.g. h ≥ 10 and h < 10, twice). Thus, the power
set 2
P
O
has 32 elements. One of these elements is
hv ≥ 2,h = 0i. Passing the constraint v ≥ 2 ∧ h = 0
to an SMT solver yields a concrete assignment, e.g.
v = 3,h = 0. Finally, triggering this assignment in
state q
0
, which is the first synchronization point of
this scenario object, reveals a new state which cor-
responds to the second synchronization point. How-
ever, triggering the element {v = 0} does not result
in reaching a new state: the scenario object did not
request this assignment, and so it does not wake up
from the synchronization call.
Repeating this process to saturation produces a
transition graph equivalent to the one depicted in
Fig. 2. (In order to reduce clutter in the resulting
graph, some transitions can then be merged together
by additional invocations of the SMT solver; applying
this approach is part of our ongoing work.)
4 FORMALLY ANALYZING rSBM
Model Checking Rich SBM. Given Lemma 1, it is
straightforward to devise a model-checking algorithm
for rSBM models. Given a model M and a safety
property ϕ, we can construct the transition graph G
of M, compose it with ϕ, and then check whether
there are any reachable states that violate ϕ. The
rSBM formalism is sufficiently expressive to formu-
late the property ϕ itself as a scenario object that sim-
ply marks some of its states as bad. Then, the same
techniques from Section 3 can be used to extract the
composite transition graph.
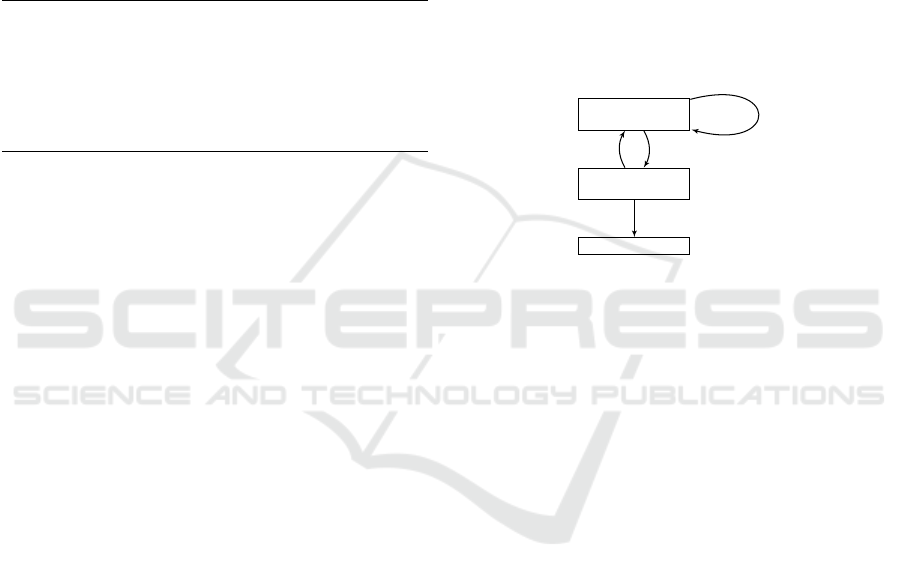
We demonstrate this process with an example. Let
us review again the model from Fig. 2, and let us con-
sider a safety property stating that it is forbidden for
the drone to turn sharply, either vertically or horizon-
tally, twice in a row. This property can be encoded as
the scenario object that appears in Fig. 3. This object
never requests or blocks anything; it only waits for
two consecutive events in which the horizontal or ver-
tical angular velocities were high (|h| ≥ 18 or |v| ≥ 4,
respectively). If such two consecutive events are de-
tected, the object marks the state as bad.
Request
/
0
Block
/
0
Request
/
0
Block
/
0
Bad
|v| ≥ 4 ∨|h| ≥ 18
|v| ≥ 4 ∨|h| ≥ 18
|v| < 4 ∧|h| < 18
|v| < 4 ∧|h| < 18
Figure 3: Encoding a safety property as an rSBM scenario
object.
By composing this new scenario object with the
model depicted in Fig. 2 and searching for reach-
able bad states (e.g., using BFS), we can determine
that a safety violation is possible. Further, using the
concrete variable assignments returned by the SMT
solver, we can provide a counter-example that demon-
strates this, e.g.: the triggering of hv = 5,h = 0i
and then of hv = 0,h = 20i, which is allowed by the
model.
Repairing Rich SBM Modes. Given an rSB model
M and a violated safety property ϕ, we now seek to re-
pair M so that ϕ becomes satisfied. Our goal is to cut
off any bad states in the underlying transition graph
G, so that they become unreachable from the initial
state q
0
. Further, we wish to cut off only paths that
lead, or are guaranteed to lead, to a violating state;
that is, we do not wish to remove any runs that are not
violating.
To this end, we follow an approach proposed
for repairing vSBM (Harel et al., 2014) and utilize
the blocking idiom to create patch scenario objects.
Specifically, we propose to add to the scenario-based
model an additional scenario object that will apply
blocking at selected points during the execution, so as
to cut off the reachable bad states from the transition
graph. The algorithm for performing this repair has
the following steps: (i) given a behavioral model M
Towards Repairing Scenario-Based Models with Rich Events
367

and a scenario object for a violated safety property ϕ,
we extract the composite transition graph of M and ϕ,
as previously described. We then apply BFS to iden-
tify the set B of all reachable bad states in this graph;
(ii) next, we iteratively search for states currently not
in B, i.e. q /∈ B, such that all of their outgoing edges
lead to B, i.e. q → q
0
⇒ q
0
∈ B. Any such state is guar-
anteed to eventually lead to a violating state, and so is
added to B, i.e. B := B∪{q}. This process is repeated
until we reach a fixed point, and no new states can be
added to B; (iii) finally, we add a new scenario object
to the model that keeps track of the execution, and
blocks precisely those edges that lead to states in B.
Intuitively, this process cuts off precisely those states
that are either bad themselves, or are guaranteed to
lead to a bad state in a finite number of steps. Thus,
we only remove runs that violate the safety property
in question, and no others. Additionally, we create no
new bad runs, and do not introduce any deadlocks.
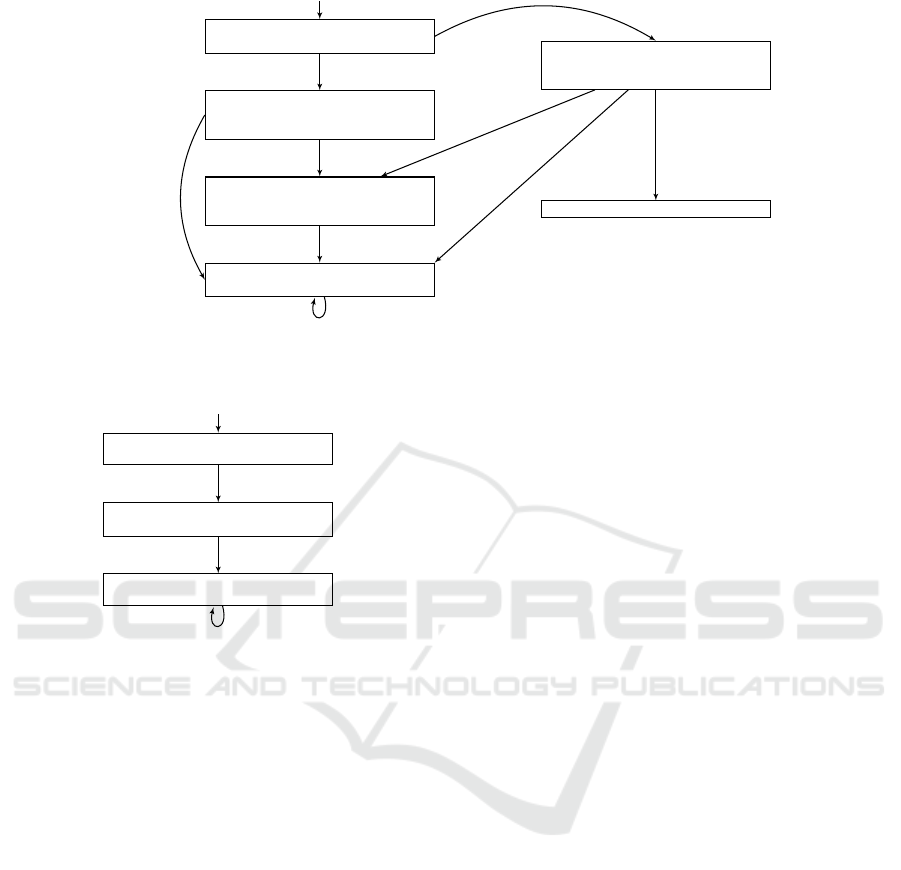
We demonstrate this process using the rSB model
from Fig. 2 and the violated safety property from
Fig. 3. The full, composite transition graph of this
model (including the safety property) is depicted in
Fig. 4. Unsurprisingly, there is a reachable bad state
in this model (state q
6
). Our repair algorithm thus
starts from state q
6
, i.e. B = {q
6
}, and identifies all
states with edges leading to q
6
; in this case, state q
5
.
Because state q
5
has edges leading also to states not
marked as bad (states q
3
and q
4
), it is not added to the
set B of bad states. Thus, the algorithm generates a
new scenario object such that, when composed with
the existing scenario objects, will apply blocking to
prevent state q
5
from transitioning into state q
6
.
This new scenario object is depicted in Fig. 5. It
merely waits for the sequence of events that would
send the original model into state q
5
, namely an as-
signment that satisfies v ≥ 4 ∧ h = 0; then blocks the
assignments that would send the original model into
state q
6
, namely h ≥ 18; and then does nothing else
for the remainder of the run.
For soundness, we have the following lemma
(proof omitted):
Lemma 2. Let M be an rSB model with reachable
bad states, and let M
0
be this model augmented with a
patch scenario object, as explained above. The set of
runs of M
0
is then precisely the set of runs of M, with
all violating runs removed.
We note that, while we have focused here on
model checking and repairing safety violations in rSB
models, similar operations can be performed also for
liveness properties. Given a liveness property ϕ, for-
mulated as a scenario object that marks some states as
good, we can check whether there exists a reachable
cycle in the composite rSB model that does not con-
tain any good states (Baier and Katoen, 2008). Fur-
ther, if we detect such a cycle, a patch scenario object
can be added to the model to prevent it, again using
the blocking idiom (Harel et al., 2014). We leave treat-
ment of this case for future work.
5 RELATED WORK
The general research question that this paper ad-
dresses, namely how to effectively model complex
systems and then repair these models, has been stud-
ied extensively. Here, we focused on the scenario-
based modeling paradigm, in which system behaviors
are modeled as scenarios (Damm and Harel, 2001;
Harel and Marelly, 2003; Harel et al., 2012b). There
are numerous related approaches for modeling event-
driven reactive systems: notable examples include Es-
terel (Berry and Gonthier, 1992), Lustre (Halbwachs
et al., 1991), Signal (Le Guernic et al., 1991), and
Petri Nets (Holloway et al., 1997). Similar concepts
appear also in component based programming lan-
guages, such as BIP (Basu et al., 2006). Some of our
repair techniques may be carried over to these frame-
works, provided that the blocking idiom, which is cru-
cial to our approach, is present or can be achieved
using other idioms. More broadly, scenario-based
modeling is adequate for modeling discrete event sys-
tems (Cassandras and Lafortune, 2009); and the re-
pair of SB models is related to the supervisory con-
trol problem of such systems (Ramadge and Wonham,
1987; Ramadge and Wonham, 1989).
Prior work has demonstrated how scenario-based
models may be automatically repaired (Katz, 2013;
Harel et al., 2014; Harel et al., 2012a), and here we
generalized and extended this approach to scenario-
based models with rich events — which are neces-
sary for modeling more complex systems (Katz et al.,
2019; Katz, 2021; Elyasaf et al., 2018; Bar-Sinai
et al., 2019). The automated repair problem in other
modeling and programming paradigms has also been
studied extensively: some examples include fault lo-
calization and automatic repair by identifying sets
of malfunctioning components and synthesizing re-
placement components (Staber et al., 2005b; Staber
et al., 2005a; Jobstmann et al., 2005); program repair
via semantic analysis (Nguyen et al., 2013); the au-
tomatic repair of concurrency-related bugs by analyz-
ing execution traces associated with bug reports (Jin
et al., 2011); applying genetic-programming to repair
legacy C programs (Weimer et al., 2010); combining
genetic-programming with co-evolution of test cases
until a bug is repaired (Arcuri and Yao, 2008); and
leveraging information regarding previous repairs (Le
MODELSWARD 2021 - 9th International Conference on Model-Driven Engineering and Software Development
368
Request v ≥ 2 ∧ h = 0
Block h ≤ −20 ∨h ≥ 20 ∨v ≤ −5 ∨v ≥ 5
Request h ≥ 10
Block v 6= 0 ∨ h < 0∨
h ≤ −20 ∨ h ≥ 20 ∨ v ≤ −5 ∨ v ≥ 5
2 ≤ v < 4 ∧h = 0
Request h ≥ 10
Block v 6= 0 ∨ h < 10∨
h ≤ −20 ∨ h ≥ 20 ∨ v ≤ −5 ∨ v ≥ 5
h < 10
Request true
Block h ≤ −20 ∨h ≥ 20 ∨v ≤ −5 ∨v ≥ 5
h ≥ 10
h ≥ 10
Request h ≥ 10
Block v 6= 0 ∨ h < 0∨
h ≤ −20 ∨ h ≥ 20 ∨ v ≤ −5 ∨ v ≥ 5
v ≥ 4 ∧h = 0
10 ≤ h < 18
h < 10
true
Bad
h ≥ 18
q
1
q
2
q
3
q
4
q
5
q
6
Figure 4: The composite transition graph of the model from Fig. 2, composed also with the scenario object for the safety
property form Fig. 3.
Request
/
0
Block
/
0
Request
/
0
Block h ≥ 18
v ≥ 4 ∧h = 0
Request
/
0
Block
/
0
true
true
Figure 5: The composite transition graph of the model from
Fig. 2, composed also with the scenario object for the safety
property form Fig. 3.
et al., 2016). Naturally, work on automatic-repair of
models and programs can be considered a particular
case of program synthesis (Pnueli and Rosner, 1989;
Bloem et al., 2012; Alur et al., 2013).
Scenario-based models have been automatically
analyzed in a variety of ways that go beyond re-
pair. Notable examples include compositional verifi-
cation (Harel et al., 2013b; Harel et al., 2015c; Harel
et al., 2015b; Katz et al., 2015), automated optimiza-
tion (Greenyer et al., 2016b; Steinberg et al., 2018),
synthesis (Greenyer et al., 2016a), and specification
mining (Marron et al., 2016; Harel et al., 2016b). It
will be interesting to extend these approaches to the
rSBM setting, using the techniques we have outlined
here.
Our proposed approach relies on constraint
solvers in order to construct the model’s underly-
ing transition graph. The use of such solvers in
the context of software modeling is expending, with
common use-cases typically revolving around formal
methods. Some examples include symbolic execu-
tion (P
˘
as
˘
areanu and Visser, 2009), bounded model-
checking (Biere et al., 1999), and concolic test-
ing (Sen, 2007). The aforementioned techniques, and
many others, showcase the benefits that automated
solvers afford in the context of the various tasks that
arise as part of a software model’s life cycle.
6 CONCLUSION
Scenario-based modeling is promising approach for
designing and implementing complex systems: on
one hand, it is intuitive and well-aligned with human
perception of models, and on the other it is compat-
ible with automated analysis and repair of models.
Our initial results demonstrate that extending SBM to
support rich events, which may be required for mod-
eling various real-world systems, does not harm this
compatibility: specifically, it is still possible to span
the underlying transition systems of models, and use
these transition systems for model-checking and au-
tomated repair.
We regard this paper as a first step in the direc-
tion of creating automated analysis tools for rSBM.
As part of our ongoing work we are pursuing sev-
eral directions: (i) implement our repair technique
on top of an existing rSBM platform, and evaluate
it on varied benchmarks; (ii) leverage our technique
for spanning rSBM transition graphs to automate ad-
ditional aspects of the system’s life cycle, such as op-
timization (Harel et al., 2015a) and specification min-
ing (Harel et al., 2018); and (iii) further improve the
scalability of our technique for transition graph span-
ning. We hope that these lines of work will promote
the use of rSBM in additional systems and settings.
Towards Repairing Scenario-Based Models with Rich Events
369

ACKNOWLEDGEMENTS
The project was partially supported by grants from
the Binational Science Foundation (2017662) and the
Israel Science Foundation (683/18).
REFERENCES
Alexandron, G., Armoni, M., Gordon, M., and Harel, D.
(2014). Scenario-Based Programming: Reducing the
Cognitive Load, Fostering Abstract Thinking. In Proc.
36th Int. Conf. on Software Engineering (ICSE), pages
311–320.
Alur, R., Bodik, R., Juniwal, G., Martin, M., Raghothaman,
M., Seshia, S., Singh, R., Solar-Lezama, A., Torlak,
E., and Udupa, A. (2013). Syntax-Guided Synthesis.
Proc. of the IEEE, pages 1–8.
Arcuri, A. and Yao, X. (2008). A Novel Co-evolutionary
Approach to Automatic Software Bug Fixing. In Proc.
10th IEEE Congress on Evolutionary Computation
(CEC), pages 162–168.
Baier, C. and Katoen, J.-P. (2008). Principles of Model
Checking. MIT Press.
Bar-Sinai, M., Elyasaf, A., Sadon, A., and Weiss, G. (2019).
A Scenario Based On-Board Software and Testing En-
vironment for Satellites. In Proc. 59th Israel Annual
Conf. on Aerospace Sciences (IACAS), pages 1407–
1419.
Bar-Sinai, M., Weiss, G., and Shmuel, R. (2018). BPjs: An
Extensible, Open Infrastructure for Behavioral Pro-
gramming Research. In Proc. 21st ACM/IEEE Int.
Conf. on Model Driven Engineering Languages and
Systems (MODELS), pages 59–60.
Barrett, C. and Tinelli, C. (2018). Satisfiability Modulo
Theories. In Clarke, E., Henzinger, T., Veith, H.,
and Bloem, R., editors, Handbook of Model Check-
ing. Springer.
Basu, A., Bozga, M., and Sifakis, J. (2006). Modeling Het-
erogeneous Real-time Systems in BIP. In Proc. 4th
IEEE Int. Conf. on Software Engineering and Formal
Methods (SEFM), pages 3–12.
Berry, G. and Gonthier, G. (1992). The Esterel syn-
chronous programming language: design, semantics,
implementation. Science of Computer Programming,
19(2):87–152.
Biere, A., Cimatti, A., Clarke, E., and Zhu, Y. (1999). Sym-
bolic Model Checking without BDDs. In Proc. 5th Int.
Conf. on Tools and Algorithms for the Construction
and Analysis of Systems (TACAS), pages 193–207.
Bloem, R., Jobstmann, B., Piterman, N., Pnueli, A., and
Saar, Y. (2012). Synthesis of Reactive(1) Designs.
Journal of Computer and System Sciences, 78(3):911–
938.
Cassandras, C. and Lafortune, S. (2009). Introduction to
Discrete Event Systems. Springer Science & Business
Media.
Damm, W. and Harel, D. (2001). LSCs: Breathing Life
into Message Sequence Charts. Journal on Formal
Methods in System Design (FMSD), 19(1):45–80.
Elyasaf, A. (2020). Context-Oriented Behavioral Program-
ming. Technical Report. https://arxiv.org/abs/2005.
02373.pdf.
Elyasaf, A., Marron, A., Sturm, A., and Weiss, G. (2018).
A Context-Based Behavioral Language for IoT. In
Proc. 5th Int. Workshop on Model-driven Robot Soft-
ware Engineering (MORSE), pages 485–494.
Elyasaf, A., Sadon, A., Weiss, G., and Yaacov, T. (2019).
Using Behavioral Programming with Solver, Con-
text, and Deep Reinforcement Learning for Playing
a Simplified RoboCup-Type Game. In Proc. 22nd
ACM/IEEE Int. Conf. on Model Driven Engineering
Languages and Systems Companion (MODELS-C),
pages 243–251.
Gordon, M., Marron, A., and Meerbaum-Salant, O. (2012).
Spaghetti for the Main Course? Observations on
the Naturalness of Scenario-Based Programming. In
Proc. 17th Conf. on Innovation and Technology in
Computer Science Education (ITICSE), pages 198–
203.
Greenyer, J., Gritzner, D., Gutjahr, T., K
¨
onig, F., Glade,
N., Marron, A., and Katz, G. (2017). ScenarioTools
— A Tool Suite for the Scenario-based Modeling and
Analysis of Reactive Systems. Journal of Science of
Computer Programming (J. SCP), 149:15–27.
Greenyer, J., Gritzner, D., Katz, G., and Marron, A.
(2016a). Scenario-Based Modeling and Synthesis for
Reactive Systems with Dynamic System Structure in
ScenarioTools. In Proc. 19th ACM/IEEE Int. Conf.
on Model Driven Engineering Languages and Systems
(MODELS), pages 16–23.
Greenyer, J., Gritzner, D., Katz, G., Marron, A., Glade,
N., Gutjahr, T., and K
¨
onig, F. (2016b). Distributed
Execution of Scenario-Based Specifications of Struc-
turally Dynamic Cyber-Physical Systems. In Proc.
3rd Int. Conf. on System-Integrated Intelligence: New
Challenges for Product and Production Engineering
(SYSINT), pages 552–559.
Gritzner, D. and Greenyer, J. (2018). Synthesizing Exe-
cutable PLC Code for Robots from Scenario-Based
GR(1) Specifications. In Proc. 4th Workshop of
Model-Driven Robot Software Engineering (MORSE),
pages 247–262.
Halbwachs, N., Caspi, P., Raymond, P., and Pilaud, D.
(1991). The Synchronous Data-Flow Programming
Language LUSTRE. Proc. of the IEEE, 79(9):1305–
1320.
Harel, D., Kantor, A., and Katz, G. (2013a). Relaxing Syn-
chronization Constraints in Behavioral Programs. In
Proc. 19th Int. Conf. on Logic for Programming, Arti-
ficial Intelligence and Reasoning (LPAR), pages 355–
372.
Harel, D., Kantor, A., Katz, G., Marron, A., Mizrahi, L.,
and Weiss, G. (2013b). On Composing and Proving
the Correctness of Reactive Behavior. In Proc. 13th
Int. Conf. on Embedded Software (EMSOFT), pages
1–10.
Harel, D., Kantor, A., Katz, G., Marron, A., Weiss, G., and
Wiener, G. (2015a). Towards Behavioral Program-
ming in Distributed Architectures. Journal of Science
of Computer Programming (J. SCP), 98:233–267.
MODELSWARD 2021 - 9th International Conference on Model-Driven Engineering and Software Development
370

Harel, D. and Katz, G. (2014). Scaling-Up Behavioral Pro-
gramming: Steps from Basic Principles to Applica-
tion Architectures. In Proc. 4th Int. Workshop on Pro-
gramming based on Actors, Agents, and Decentral-
ized Control (AGERE!), pages 95–108.
Harel, D., Katz, G., Lampert, R., Marron, A., and Weiss, G.
(2015b). On the Succinctness of Idioms for Concur-
rent Programming. In Proc. 26th Int. Conf. on Con-
currency Theory (CONCUR), pages 85–99.
Harel, D., Katz, G., Marelly, R., and Marron, A. (2016a).
An Initial Wise Development Environment for Behav-
ioral Models. In Proc. 4th Int. Conf. on Model-Driven
Engineering and Software Development (MODEL-
SWARD), pages 600–612.
Harel, D., Katz, G., Marelly, R., and Marron, A. (2016b).
First Steps Towards a Wise Development Environ-
ment for Behavioral Models. Int. Journal of Informa-
tion System Modeling and Design (IJISMD), 7(3):1–
22.
Harel, D., Katz, G., Marelly, R., and Marron, A. (2018).
Wise Computing: Toward Endowing System Devel-
opment with Proactive Wisdom. IEEE Computer,
51(2):14–26.
Harel, D., Katz, G., Marron, A., Sadon, A., and Weiss, G.
(2020). Executing Scenario-Based Specification with
Dynamic Generation of Rich Events. Communica-
tions in Computer and Information Science (CCIS),
1161.
Harel, D., Katz, G., Marron, A., and Weiss, G. (2012a).
Non-Intrusive Repair of Reactive Programs. In Proc.
17th IEEE Int. Conf. on Engineering of Complex Com-
puter Systems (ICECCS), pages 3–12.
Harel, D., Katz, G., Marron, A., and Weiss, G. (2014). Non-
Intrusive Repair of Safety and Liveness Violations in
Reactive Programs. Transactions on Computational
Collective Intelligence (TCCI), 16:1–33.
Harel, D., Katz, G., Marron, A., and Weiss, G. (2015c). The
Effect of Concurrent Programming Idioms on Veri-
fication. In Proc. 3rd Int. Conf. on Model-Driven
Engineering and Software Development (MODEL-
SWARD), pages 363–369.
Harel, D., Lampert, R., Marron, A., and Weiss, G. (2011).
Model-Checking Behavioral Programs. In Proc. 11th
Int. Conf. on Embedded Software (EMSOFT), pages
279–288.
Harel, D. and Marelly, R. (2003). Come, Let’s Play:
Scenario-Based Programming Using LSCs and the
Play-Engine. Springer.
Harel, D., Marron, A., and Weiss, G. (2010). Program-
ming Coordinated Scenarios in Java. In Proc. 24th
European Conf. on Object-Oriented Programming
(ECOOP), pages 250–274.
Harel, D., Marron, A., and Weiss, G. (2012b). Behav-
ioral Programming. Communications of the ACM,
55(7):90–100.
Holloway, L., Krogh, B., and Giua, A. (1997). A Survey
of Petri Net Methods for Controlled Discrete Event
Systems. Discrete Event Dynamic Systems, 7(2):151–
190.
Jin, G., Song, L., Zhang, W., Lu, S., and Liblit, B. (2011).
Automated Atomicity-Violation Fixing. In Proc. 32nd
ACM SIGPLAN Conf. on Programming Language De-
sign and Implementation (PLDI), pages 389–400.
Jobstmann, B., Griesmayer, A., and Bloem, R. (2005). Pro-
gram Repair as a Game. In Proc. 17th Int. Conf. on
Computer Aided Verification (CAV), pages 226–238.
Katz, G. (2013). On Module-Based Abstraction and Re-
pair of Behavioral Programs. In Proc. 19th Int. Conf.
on Logic for Programming, Artificial Intelligence and
Reasoning (LPAR), pages 518–535.
Katz, G. (2020). Guarded Deep Learning using Scenario-
Based Modeling. In Proc. 8th Int. Conf. on
Model-Driven Engineering and Software Develop-
ment (MODELSWARD), pages 126–136.
Katz, G. (2021). Augmenting Deep Neural Networks with
Scenario-Based Guard Rules. Communications in
Computer and Information Science (CCIS).
Katz, G., Barrett, C., and Harel, D. (2015). Theory-Aided
Model Checking of Concurrent Transition Systems. In
Proc. 15th Int. Conf. on Formal Methods in Computer-
Aided Design (FMCAD), pages 81–88.
Katz, G., Marron, A., Sadon, A., and Weiss, G. (2019).
On-the-Fly Construction of Composite Events in
Scenario-Based Modeling Using Constraint Solvers.
In Proc. 7th Int. Conf. on Model-Driven Engineering
and Software Development (MODELSWARD), pages
143–156.
Le, X., Lo, D., and Le Goues, C. (2016). History Driven
Program Repair. In Proc. IEEE 23rd Int. Conf.
on Software Analysis, Evolution, and Reengineering
(SANER), pages 213–224.
Le Guernic, P., Gautier, T., Le Borgne, M., and Le Maire,
C. (1991). Programming Real-Time Applications with
Signal. Proceedings of the IEEE, 79(9):1321–1336.
Marron, A., Arnon, B., Elyasaf, A., Gordon, M.,
Katz, G., Lapid, H., Marelly, R., Sherman, D.,
Szekely, S., Weiss, G., and Harel, D. (2016). Six
(Im)possible Things before Breakfast: Building-
Blocks and Design-Principles for Wise Computing. In
Proc. 19th ACM/IEEE Int. Conf. on Model Driven En-
gineering Languages and Systems (MODELS), pages
94–100.
Nguyen, H., Qi, D., Roychoudhury, A., and Chandra, S.
(2013). Semfix: Program Repair via Semantic Analy-
sis. In Proc. 35th Int. Conf. on Software Engineering
(ICSE), pages 772–781.
Pnueli, A. and Rosner, R. (1989). On the Synthesis of a Re-
active Module. In Proc. 16th ACM Symposium Princi-
ples of Programming Languages (POPL), pages 179–
190.
P
˘
as
˘
areanu, C. and Visser, W. (2009). A Survey of New
Trends in Symbolic Execution for Software Testing
and Analysis. Int. Journal on Software Tools for Tech-
nology Transfer, 11(4):339–353.
Ramadge, P. and Wonham, W. (1987). Supervisory Control
of a Class of Discrete Event Processes. SIAM Journal
on Control and Optimization, 25(1):206–230.
Ramadge, P. and Wonham, W. (1989). The Control of Dis-
crete Event Systems. Proc. of the IEEE, 77(1):81–98.
Sen, K. (2007). Concolic Testing. In Proc. 22st IEEE/ACM
Int. Conf. on Automated Software Engineering (ASE),
pages 571–572.
Towards Repairing Scenario-Based Models with Rich Events
371

Staber, S., Jobstmann, B., and Bloem, R. (2005a). Diagno-
sis is Repair. In Proc. 16th Int. Workshop on Princi-
ples of Diagnosis (DX), pages 169–174.
Staber, S., Jobstmann, B., and Bloem, R. (2005b). Find-
ing and Fixing Faults. Correct Hardware Design and
Verification Methods, 3275:35–49.
Steinberg, S., Greenyer, J., Gritzner, D., Harel, D., Katz,
G., and Marron, A. (2017). Distributing Scenario-
Based Models: A Replicate-and-Project Approach. In
Proc. 5th Int. Conf. on Model-Driven Engineering and
Software Development (MODELSWARD), pages 182–
195.
Steinberg, S., Greenyer, J., Gritzner, D., Harel, D., Katz,
G., and Marron, A. (2018). Efficient Distributed Exe-
cution of Multi-Component Scenario-Based Models.
Communications in Computer and Information Sci-
ence (CCIS), 880:449–483.
Weimer, W., Forrest, S., Le Goues, C., and Nguyen, T.
(2010). Automatic Program Repair with Evolutionary
Computation. Communications of the ACM (CACM),
53:109–116.
MODELSWARD 2021 - 9th International Conference on Model-Driven Engineering and Software Development
372
