
Comparison between Filtered Canny Edge Detector and
Convolutional Neural Network for Real Time Lane Detection in a
Unity 3D Simulator
Jurij Kuzmic and Günter Rudolph
Department of Computer Science, TU Dortmund University, Otto-Hahn-Str. 14, Dortmund, Germany
Keywords: Lane Detection, Convolutional Neural Network (ConvNet), Filtered Canny Edge Algorithm, Autonomous
Driving, Simulator in Unity 3D, Sim-to-Real Transfer, Training Data Generation, Computational Intelligence.
Abstract: This paper presents two methods for lane detection in a 2D image. Additionally, we implemented filtered
Canny edge detection and convolutional neural network (ConvNet) to compare these for lane detection in a
Unity 3D simulator. In the beginning, related work of this paper is discussed. Furthermore, we extended the
Canny edge detection algorithm with a filter especially designed for lane detection. Additionally, an optimal
configuration of the parameters for the convolutional neural network is found. The network structure of the
ConvNet is also shown and explained layer by layer. As well known, a lot of annotated training data for
supervised learning of ConvNet is necessary. These annotated training data are generated with the Unity 3D
environment. The procedure for generation of annotated training data is also presented in this paper.
Additionally, these two developed systems are compared to find a better and faster system for lane detection
in a simulator. Through the experiments described in this paper the comparison of the run time of the
algorithms and the run time depending on the image size is presented. Finally, further research and work in
this area are discussed.
1 INTRODUCTION
In the autonomous vehicle industry, vehicles can
drive independently and without a driver. To do this,
these vehicles have to recognise the lane precisely in
order not to get away from the road and not to injure
the occupants. The lane markings are marked as solid
or dashed lines on the left and right side of the road
and are directly visible to the human eye. But for
autonomous vehicles we need algorithms. These lines
of the lane have to be distinguished and separated
from other lines in the image by the autonomous
vehicle. After the separation of the lines in a 2D
image, the centre of the lane can be calculated next.
Lane detection is not new and has been researched in
the vehicle industry for a long time. Today, Lane
Keeping Assist Systems (LKAS) or Lane Departure
Warning Systems (LDWS) are standard equipment in
some vehicles. These systems warn if you get out of
lane or can even keep the car in the lane for a while.
For example, at Nissan Motors such systems exist
since 2001 (Tsuda, 2001), at Citroën since 2005
(Web.archive, 2005) and at Audi since 2007
(Audiworld, 2007). The problem in academic
research is that algorithms and procedures, which are
already established in the autonomous vehicle
industry, are kept under lock and key and are not
freely accessible. For this reason, own algorithms and
procedures have to be researched and developed in
the academic field.
The goal of our work is to switch from the
simulation we have developed before (Kuzmic and
Rudolph, 2020) to the real model cars. In case of a
successful transfer of simulation to reality (sim-to-
real transfer), the model car behaves exactly as before
in the simulation. In the simulation, some tools keep
the vehicle on track without visual evaluation. In
reality, these aids do not exist. For this reason, the
lane in the simulation also has to be recognised
visually with a camera. For this purpose, two methods
are implemented, tested and compared in this paper.
These methods can not only be applied to the images
from the simulation. After some adjustments of the
parameters, these methods are also suitable for real-
world use.
148
Kuzmic, J. and Rudolph, G.
Comparison between Filtered Canny Edge Detector and Convolutional Neural Network for Real Time Lane Detection in a Unity 3D Simulator.
DOI: 10.5220/0010383701480155
In Proceedings of the 6th Inter national Conference on Internet of Things, Big Data and Security (IoTBDS 2021), pages 148-155
ISBN: 978-989-758-504-3
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
2 RELATED WORK
There are some scientific papers dealing with the
detection of the lane, e.g. (Wang, Teoh, Shen, 2004)
who have made the detection of the lane and tracking
using B-Snake or (Kim, 2008) who has developed a
robust lane-detection-and-tracking algorithm to deal
with challenging scenarios such as a lane curvature or
worn lane markings. Some scientific works use the
Canny edge algorithm and hyperbola fitting to detect
the lane (Assidiq, Khalifa, Islam, Khan, 2008). A
fairly recent approach to detect lanes is to incorporate
information from previous frames. This can be
realised by combining the convolutional neural
network (CNN) and the recurrent neural network
(RNN) (Zou et al., 2020). As soon as 3D information
is available, it is possible to distinguish between roads
and obstacles (Nedevschi et al., 2004). Such 3D
information can be obtained, for example, from
LiDAR sensors (Beltrán et al., 2018). Another
approach to get 3D information for lane or object
detection is the stereo camera. This camera contains
two cameras at a certain distance, similar to human
eyes. This delivers two images. The two images can
be used to determine the depth of the image to
distinguish between roads, humans, cars, houses, etc.
(Li, Chen, Shen, 2019). Also, some related scientific
papers present the sim-to-real transfer. Most of them
are deep reinforcement learning approaches. The goal
of our work is to develop further methods for lane
detection in a simulator, to perform a sim-to-real
transfer and to switch from simulation to the real
model vehicles.
3 FILTERED CANNY EDGE FOR
LANE DETECTION
The Canny edge detector (Canny, 1986) is often used
to create edges in a 2D image because it works
quickly and accurately. In an image which shows a
track, the human eye directly detects the track. But to
keep a car in the lane, these lines have to be filtered
first. For this reason, we have extended this algorithm
and researched our procedure for filtering. To
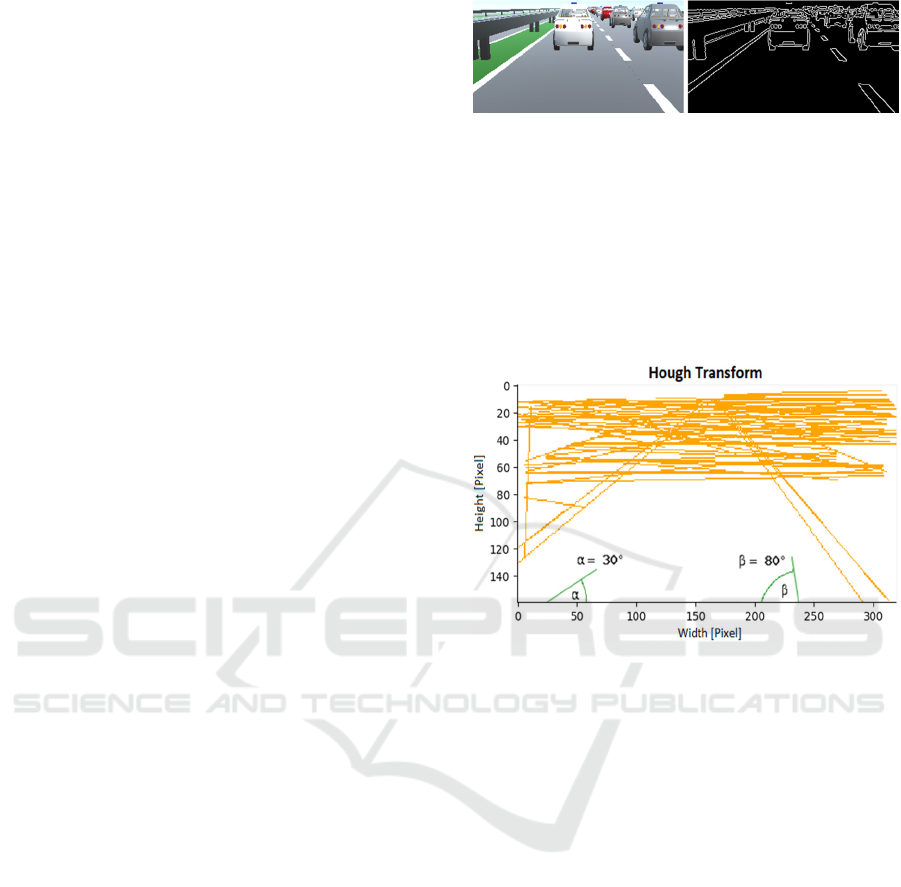
determine the lane using the Canny edge detector, a
greyscale image has to be created from the coloured
input image (Fig. 1, left). In the next step, an edge
image has to be made from the greyscale image using
the canny edge algorithm. Figure 1, right shows the
generated edge image from the coloured input image.
Figure 1: Image from the simulation. Left: Colour input
image. Right: Generated Canny edge image.
The edges can now be extracted as lines from the
created edge image using the Hough transform (Canu,
2018). This transformation gives the coordinates of
all lines in the image as P (x
1
, y
1
) and Q (x
2
, y
2
)
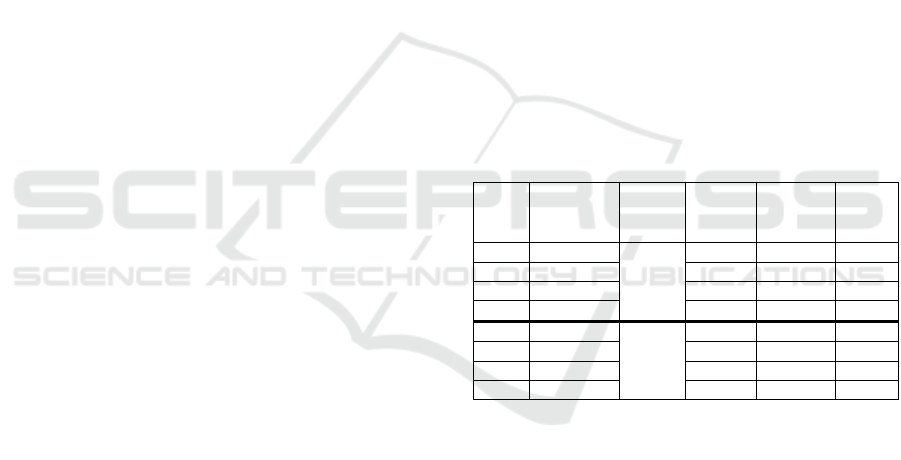
coordinates. Figure 2 shows all found lines from the
edge image with the Hough transform demonstrated
in a diagram.
Figure 2: Plotted coordinates of lines after Hough transform
(orange). Angles alpha and beta for comparison (green).
For each line, the gradient (m) of the straight line is
calculated. From this gradient, the angle in degrees to
the X-axis can now be calculated with the arctangent
function atan(m). After calculating the angles, all
lines with an angle below 30° and above 80° (alpha
and beta in Figure 2) can be ignored. These
parameters work for our orientation and tilt of the
camera in the simulation. If the position of the camera
changes, these parameters can be adjusted in this
algorithm. For all remaining (pre-filtered) lines the
intersections with the X-axis (IX) can now be
calculated and saved together with the P and Q
coordinates of the straight line. In the next step, the
smallest distance (D) on the X-axis has to be found
from the centre of the image (B) to the left and right:
D = |IX-B|. Search in a predefined radius (R) for
further intersection points (IX) to calculate the centre
of the lane marking. This parameter depends on the
width of the image (pixels) and can also be adjusted.
The following figure 3 shows this procedure.
Comparison between Filtered Canny Edge Detector and Convolutional Neural Network for Real Time Lane Detection in a Unity 3D
Simulator
149

Figure 3: Filtered lane points (IX). Found lane points left
(black) and right (red) in a certain radius (dark-green). The
input image frame and the middle of the vehicle (light-
green).
So, an average function left and right can be
calculated from the found lines. These intermediate
functions are the course of the track marking left and
right. To calculate the centre of the track, the centre
can be calculated from these two average functions.
The following figure 4 shows the lane before (Fig. 4,
left) and after filtering (Fig. 4, right).
Figure 4: Filtered Canny edge for lane detection. Left:
Plotted lines after Hough transform in a colour input image.
Right: Colour input image with filtered lane detection.
In this example, it was assumed that the track is
straight. On motorways, this is usually the case. At
least in the relevant vicinity of the car. Actually, the
motorways are only slightly curved. If the road is
straight, only one orientation point left and right at a
certain height (red points in figure 5) is sufficient to
determine the lane course in the input image and to
control the vehicle.
Figure 5: Points of orientation at a certain height (red
points) to calculate the centre of the lane and to keep the
vehicle on track (controlling the car).
However, if the road is curved, several orientation
points at different heights are necessary. For this
purpose, the image can be divided horizontally into
several sections (Wang, Teoh, Shen, 2004). The
number and height of the sections can be freely
chosen. This horizontal split depends on the
resolution, the visible image area and the tilt of the
camera. As soon as the splitting is done, the lane
markings left and right of each section can be
recognised as a straight line with the filtered Canny
edge algorithm. The following Figure 6 describes this
procedure. The individual sections are separated by
the horizontal orange lines.
Figure 6: Multiple points of orientation for controlling the
car. Section separator (orange lines). Points of orientation
(green squares).
After the lane detection for each section, the track
markings are obtained as 2D coordinates left and right
of the image. Thus, the lane centre can be determined
or the course of the track can be approximated as a
function.
Our filtered Canny edge algorithm at a glance:
0. As a preliminary work, the camera should be
aligned and calibrated. Only the vital areas
should be visible in the image (only the
track). For example, the bonnet of the car or
the power lines in the sky should not be
visible.
1. Create a greyscale image from the coloured
input image.
2. Create a Canny edge image from the
grayscale image.
3. Apply Hough transform to the edge image
(2D coordinates for P and Q).
4. Calculate the gradient (m) for each straight
line.
5. Calculate the angle with atan(m) from the
gradient (m).
6. Ignore all lines with an angle below 30° and
above 80°.
7. Calculate the points of intersection with the
X-axis (IX) for the remaining lines.
8. Save intersection points (IX) with the P and
Q 2D coordinates.
IoTBDS 2021 - 6th International Conference on Internet of Things, Big Data and Security
150

9. From the centre of the image (B), find the
smallest distance D = |IX-B| left and right.
10. Search in a predefined radius (R) for further
intersection points (IX) left and right.
11. Calculate an average function (straight line)
left and right from the found lines.
12. Calculate the centre of the track from these
two functions left and right.
4 ConvNet FOR LANE
DETECTION
To train a convolutional neural network (ConvNet)
optimally, a large number of annotated data points
(training data) are required for supervised learning.
Such data can also be created manually. However,
with so many data points, annotation takes a very long
time. Depending on the application, different data are
also required. The amount of training data, the input
and output data are also different. The CULane
dataset (Pan, Shi, Luo, Wang, Tang, 2018) offers data
for lane recognition for academic research. These
have already been manually annotated. However, for
further research, to perform a sim-to-real transfer, the
simulation has to be adapted to the real application.
In our case, the camera in the simulation has to have
the same resolution and orientation as the camera in
the model vehicle. For this reason, we have created
our own automatically annotated data set. The next
chapter describes this procedure.
4.1 Data Set
With our simulator in Unity 3D (Kuzmic and
Rudolph, 2020), thousands of annotated training data
(input and output data) could be generated
automatically. For the automatic generation of the
required data sets, two cameras were installed in the
vehicle at the same place in the simulator. The first
camera could see the environment normally (Fig. 7,
left), the second camera could only see the lane
markings left and right (Fig. 7, right).
Figure 7: Camera images of the vehicle. Left: Camera for
input images. Right: Camera for output images (only lane
markings).
These two images (Fig. 7) could be used for the
further generation of the training data. The input
image (Fig. 8, left) for the ConvNet was created from
Figure 7, left. This was additionally converted into a
greyscale image. To get the annotated data (output
data), a binary image (Fig. 8, right) was created first
from figure 7, right. For this purpose, a threshold had
to be found and adjusted for the simulated images
(Al-amri, Kalyankar, Khamitkar, 2010). This
parameter depends on the strength of the different
light influences in the image.
Figure 8: Input and binary image for training. Left:
Grayscale input image. Right: Binary image for annotation.
From this binary image, the information for the left
and right lane marking could be extracted (Fig. 9).
The first step is to find the centre of the lane markings
at a certain height. Since the heights are predefined
(Y-coordinates), only the X-coordinate of these pixels
is used as annotation for the input image (Fig. 8, left).
In this case, the neural network has 14 outputs; one
for each class.
Figure 9: Coordinates of the track sequence for annotation
of the input image.
As explained in section 3, several orientation points
should be defined for a winding road. For this reason,
we have defined seven different heights to describe
the straight or curved lane. These heights (32, 40, 52,
66, 84, 104, 128) are important for the orientation of
the camera and in our case, they are always the same
for our camera. The following X-coordinates (46,
319, 63, 286, 77, 251, 90, 221, 99, 197, 107, 179, 112,
166) could be extracted from figure 9 from bottom to
top. These X-positions serve as annotation for the
input image (Fig. 8, left). Due to the fast generation
of the training data, images with different width and
height can be generated and automatically annotated.
The following data sets were created and tested
(width x height): 160x80, 320x160, 640x160 and
Comparison between Filtered Canny Edge Detector and Convolutional Neural Network for Real Time Lane Detection in a Unity 3D
Simulator
151
640x320 pixels. A total of about 100,000 data sets
were created. Due to the automatic generation of the
images, the data set contains colour images (RGB
images), greyscale images and binary images as input
with the corresponding annotation.
4.2 Network Architecture
After a long period of training, evaluation and testing,
we found an optimal configuration for the ConvNet
for our training data. The convolutional layers are
characterized by the parameters output, kernel and
stride. Output is the number of output filters in the
convolution. Kernel is specifying the height and
width of the 2D convolution window which moves
over the pixels in the input image. Stride is specifying
the steps of the convolution along with the height and
width and is almost always symmetrical in the
dimension (TensorFlow, 2020). We used Rectified
Linear Unit (ReLU) as an activation function for all
layers. In the last dense layer (fully connected layer),
we used a linear function as activation for regression.
The convolutional neural network is structured as
follows (Winkel, 2020):
Convolutional (8, k = (5, 5), s = (2, 2))
2 x Convolutional (8, k = (3, 3), s = (1, 1))
Dropout (0.5)
Convolutional (16, k = (5, 5), s = (2, 2))
2 x Convolutional (16, k = (3, 3), s = (1, 1))
Dropout (0.5)
Convolutional (32, k = (5, 5), s = (2, 2))
2 x Convolutional (32, k = (3, 3), s = (1, 1))
Dropout (0.5)
Convolutional (64, k = (5, 5), s = (2, 2))
2 x Convolutional (64, k = (3, 3), s = (1, 1))
Dropout (0.5)
Flatten
Dense (2000)
Dense (1000)
Dense (200)
Dense (14)
The last dense layer shows the number of outputs of
the neural network. In our example, this contains 14
outputs for each X-coordinate of the lane (see section
4.1). The experiments with the convolutional neural
network are discussed next.
5 EXPERIMENTS
The following experiments were carried out to
compare the functionality and the run time of filtered
Canny edge algorithm and ConvNet for lane
detection. The resolution is in the format width x
height. All experiments (training of the ConvNet and
the run time measurements) are carried out on the
same hardware: Intel i7-9750H, 16 GB DDR4, 256
GB SSD, NVIDIA GeForce GTX 1660 Ti. This gives
the possibility to compare the results afterwards. The
input images for the respective methods are also the
same.
5.1 Filtered Canny Edge for Lane
Detection
The following Table 1 shows the run time of the
filtered Canny edge algorithm compared to the size of
the input image. The size of the section in the image
was evenly split. For an image with 160x80 pixels, it
corresponds to a section size of 10 pixels in height.
The time measurement per image is given in
milliseconds. Since the determination of the lines in
an image per section is different. So the average time
for the calculation of the section was built. Through
the input image is split into sections once, the time for
splitting (ct) is calculated only once. The run time (t)
in table 1 results from 𝑡=𝑠𝑡•𝑠+𝑐𝑡.
Table 1: Run time of the filtered Canny edge detection
algorithm for lane detection. First column contains the
number of the experiment (Exp. No.).
Exp.
No.
Resolution
[Pixel]
Section
(s)
Crop
[ms] (ct)
Section
Time
[ms] (st)
Run
Time
[ms] (t)
1 160x80
1
0 2.99 2.99
2 320x160 0 6.00 6.00
3 640x160 0 9.97 9.97
4 640x320 0 12.98 12.98
5 160x80
8
< 0.01 0.37 2.97
6 320x160 < 0.01 0.74 5.93
7 640x160 0.96 1.99 16.88
8 640x320 1.00 2.62 21.96
The various experiments have shown that larger
images provide more accurate lane detection. But,
finding the lane in this input image also takes longer.
If the resolution is doubling, the run time for finding
the lane in this image is doubling, too (comparison of
the run times no. 1 and 2 in table 1). For this reason,
we have chosen the resolution 320x160 pixels as the
optimal resolution for lane detection for our data. In
straight and curved roads, the evaluation takes about
six milliseconds per frame from the input image
(comparison of the run times no. 2 and 6 in table 1).
5.2 ConvNet for Lane Detection
The first step is to find the optimal input for the
convolutional neural network. Colour images,
greyscale images and binary images are available for
this purpose. To decide for one of these images, the
IoTBDS 2021 - 6th International Conference on Internet of Things, Big Data and Security
152
neural network has to be trained with these images
and the results have to be compared afterwards. By
mixing (shuffle) the data sets, each run of training is
different. The best model from ten training runs is
evaluated. The error is given in per cent and per class.
To compare the errors on different image sizes, this
error is calculated with the image width (pixels).
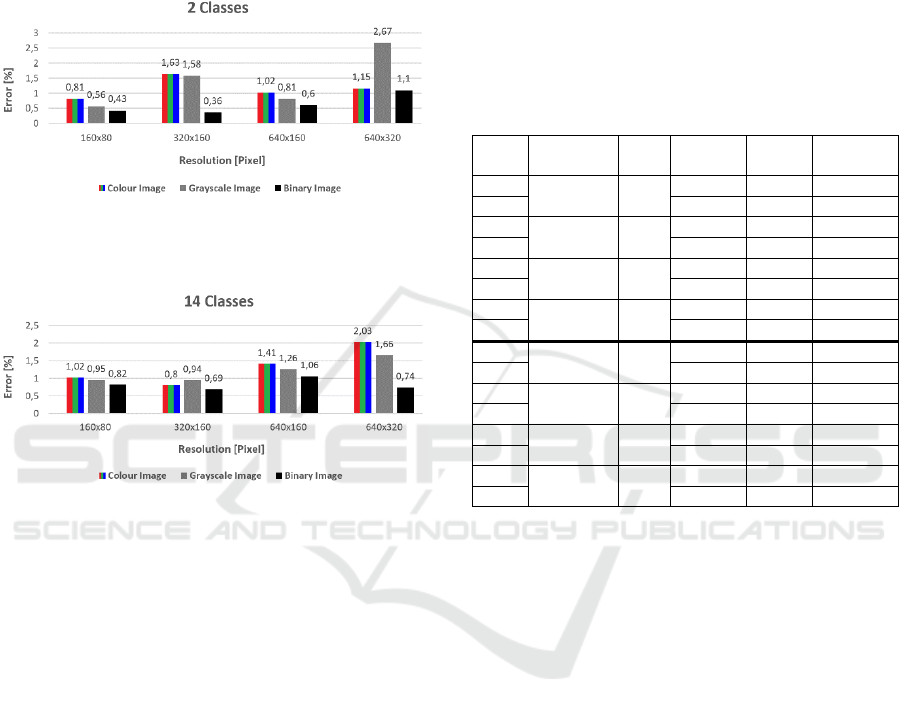
Figure 10: Diagram of training the ConvNet with two
classes. Error in per cent after ten training times with
different image resolution. The smallest value is the best.
Figure 11: Diagram of training the ConvNet with 14
classes. Error in per cent after ten training times with
different image resolution. The smallest value is the best.
As can be seen on these two diagrams, the models
trained with the binary images provide better
(smaller) error rates. This is the case for 2 (Fig. 10)
and 14 classes (Fig. 11). However, these models can
only be used in the simulation. Because of the
different light influences in the real image, the
threshold for the creation of the binary images has to
be found and adjusted every frame. This is not the
case with the simulated images. Also, the various
experiments have shown that models with the
greyscale image as input usually result in a higher
regression accuracy than the input with RGB images.
Depending on the use case, this result can be
confirmed (Bui et al., 2016). This result also depends
on the nature of images to be classified (Yadav,
2015). As soon as more information is needed from
the images, a colour image can sometimes achieve
better results than a greyscale image. Let us now look
at the colour and greyscale image models. It can be
seen that the model trained with greyscale images
with two classes as output and the 160x80 pixels
resolution provides the smallest error. So it is more
accurate compared to other models with two classes.
With 14 classes, the best result is achieved with the
model trained with colour images and the pixel size
320x160. After these experiments, the run time (Tab.
2) for the detection of the lane can be measured. For
this purpose, the best models of colour images and
greyscale images for the respective resolution are
tested. Classes 2 and 14 in table 2 correspond exactly
to sections 1 and 8 in table 1 of the experiments for
the filtered Canny edge for lane detection.
Table 2: Run time of the ConvNet for lane detection. First
column contains the number of the experiment (Exp. No.).
Exp.
No.
Resolution
[Pixel]
Class Model Error
[%]
Run Time
[ms]
1
160x80 2
Grey 0.56 18.15
2 Colour 0.81 17.95
3
320x160 2
Grey 1.58 18.95
4 Colour 1.63 19.05
5
640x160 2
Grey 0.81 19.65
6 Colour 1.02 20.75
7
640x320 2
Grey 2.67 22.64
8 Colour 1.15 27.33
9
160x80 14
Grey 0.95 18.45
10 Colour 1.02 17.80
11
320x160 14
Grey 0.94 18.85
12 Colour 0.80 20.05
13
640x160 14
Grey 1.26 19.65
14 Colour 1.41 21.09
15
640x320 14
Grey 1.66 22.25
16 Colour 2.03 25.04
In these experiments can be seen, that the number of
classes does not affect the run time (comparison of
run times no. 1 and 9 in table 2). The models with the
colour images as input require more run time
compared to the greyscale images as input to achieve
the desired output (comparison of the run times no.
15 and 16 in table 2). Because the greyscale images
have only one colour channel. In comparison, the
colour images have three colour channels. The run
time also increases for larger images compared to
smaller images as input (comparison of run times no.
1 and 15 in table 2). Since the kernel of the
convolutional layer passes through more pixels in the
input image. Also, the error of the trained model does
not affect the run time (comparison of the run times
no. 7 and 8 in table 2).
5.3 Evaluation of Results
After the performance tests for the filtered Canny
edge detection and the convolutional neural network,
these two procedures can be compared and evaluated.
The filtered Canny edge algorithm needs approx. 6
milliseconds (ms) to detect the lane in a 320x160
Comparison between Filtered Canny Edge Detector and Convolutional Neural Network for Real Time Lane Detection in a Unity 3D
Simulator
153
pixel image. With a video recording of 30 frames per
second (FPS), the actual frame rate decreases because
6 additional milliseconds are needed to determine the
lane per frame (6 𝑚𝑠 • 30 = 180 𝑚𝑠). The System
needs approx. 1.18 seconds to process 30 frames.
Calculated to the frames per second, it is around 25
FPS. The ConvNet needs about 19 ms to determine
the lane in a 320x160 pixel greyscale image with our
computer hardware. Additionally, this procedure
requires 570 ms per 30 frames (19 𝑚𝑠 • 30 =
570 𝑚𝑠). This reduces the actual frame rate to about
19 FPS. Some front cameras installed in self-driving
cars in the automotive industry can record 1080p
videos at up to 60 FPS (Texas Instruments, 2021).
This means, up to 44 FPS for filtered Canny edge
method and 28 FPS for ConvNet could be achieved.
The following calculations depend on the hardware of
the system. As a standard, videos with a lot of motion
are recorded at 30 FPS (Brunner, 2017). Therefore,
both tested procedures are suitable for lane detection.
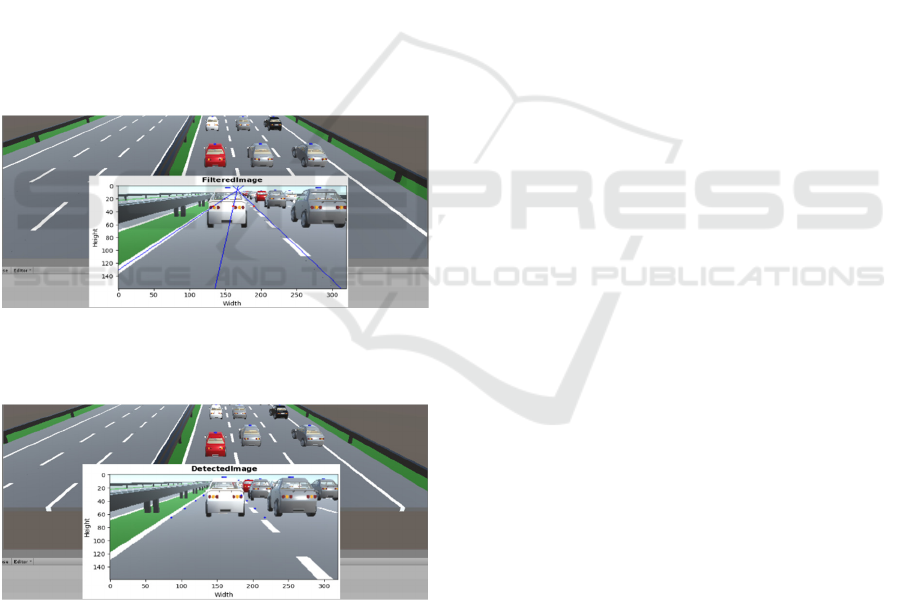
Both models (Fig. 12 and Fig. 13) are successfully
tested in the simulator. The plot of the lane is taken
from the camera of the red vehicle.
Figure 12: Testing of filtered Canny edge for lane detection
in the simulator. The plot of the lane is taken from the
camera of the red vehicle.
Figure 13: Testing of ConvNet for lane detection in the
simulator. The plot of the lane is taken from the camera of
the red vehicle.
The evaluation of the results gives the following
advantages for the filtered Canny edge method
compared to the ConvNet: Faster detection of the lane
(factor of 3 on our hardware), no training of the
artificial neural network, no training data necessary,
after adjusting the parameters - ready for different
camera orientations.
6 CONCLUSIONS
This section summarizes once again the points that
were introduced in this paper. Two methods are
presented and tested for the detection of the lane. The
first method is the Canny edge detector, which has
been extended by us. This is called filtered Canny
edge for lane detection. The lines are extracted from
an edge image and filtered under certain parameters.
This method can be used for straight and curved
roads. For curved roads, the input image can be split
horizontally into several sections. This algorithm can
be applied to each of these sections to find the track.
The smaller sections give a more accurate
approximation of the lane course. The second method
is a convolutional neural network, which is trained to
recognise the course of the track. Seven heights
(vertical) are defined in a 2D image. At these heights,
the X-coordinates for the track left and right are taken
and given to the convolutional neural network for
training. So the output of the ConvNet is 14 output
values, which describe the lane on seven different
heights. The found network structure is also presented
to implement this method of lane detection. The
acquisition of automated annotated training data from
the simulation is also presented. Experiments are
carried out for both procedures to make comparisons
and to find a suitable system for lane detection for a
model vehicle. Both presented methods are suitable
for the detection of the lane in a 2D image in terms of
quality and performance. For example, at 30 FPS,
there would be no jerking in the detection of the track
for each individual frame.
7 FUTURE WORK
As already announced, the goal of our future work is
to carry out a sim-to-real transfer successfully. This
means that the simulated environment is completely
applied to a real model vehicle. Thus, the behaviour
of the vehicles in the simulation can be compared
with the behaviour of the model vehicles in reality.
Especially, it is exciting to see how much FPS the
model car can work with. An important aspect on
motorways is the automatic creation of an emergency
corridor for the rescue vehicles in the case of an
accident. It is exciting to see whether the model
vehicles can form an emergency corridor for the
IoTBDS 2021 - 6th International Conference on Internet of Things, Big Data and Security
154

rescue vehicles. For example, how do the model
vehicles behave if an accident occurs? What is the
behaviour of the car if the radar sensor unexpectedly
fails or there are unexpected obstacles on the road, for
example, a deer crossing? These questions can be
answered after the sim-to-real transfer.
REFERENCES
Al-amri, S. S., Kalyankar, N. V., Khamitkar, S. D., 2010.
Image Segmentation by Using Threshold Techniques.
Journal of Computing, Volume 2, Issue 5.
Assidiq, A. A., Khalifa, O. O., Islam, M. R., Khan, S., 2008.
Real time lane detection for autonomous vehicles.
Computer and Communication Engineering, ICCCE
2008, International Conference on Kuala Lumpur, pp.
82-88.
Audiworld, 2007. The Audi Q7 4.2 TDI. Audiworld.com.
[online]. Available at: https://www.audiworld.com/
articles/the-audi-q7-4-2-tdi/. Accessed: 22/10/2020.
Beltrán, J., Guindel, C., Moreno, F. M., Cruzado, D.,
García, F., De La Escalera, A., 2018. BirdNet: A 3D
Object Detection Framework from LiDAR Information.
2018 21st International Conference on Intelligent
Transportation Systems (ITSC), IEEE, ISBN 978-1-
7281-0324-2.
Brunner, D., 2017. Frame Rate: A Beginner’s Guide.
Techsmith.com. [online]. Available at:
https://www.techsmith.com/blog/frame-rate-
beginners-guide/#:~:text=they're%20used.-
,24fps,and%20viewed%20at%2024%20fps. Accessed:
21/11/2020.
Bui, H. M., Lech, M., Cheng, E., Nelille, K., Burnett, I. S,
2016. Using grayscale images for object recognition
with convolutional-recursive neural network. In
Proceedings of the IEEE 6th International Conference
on Communications and Electronics, pp. 321-325.
Canny, J., 1986. A Computational Approach to Edge
Detection. IEEE Transactions on Pattern Analysis and
Machine Intelligence, Volume PAMI-8, No 6, pp. 679-
698.
Canu, S., 2018. Lines detection with Hough Transform –
OpenCV 3.4 with python 3 Tutorial 21. Pysource.com.
[online]. Available at: https://pysource.com
/2018/03/07/lines-detection-with-hough-transform-
opencv-3-4-with-python-3-tutorial-21/. Accessed:
15/09/2020.
Kahn, G., Abbeel, P., Levine, S., 2020. LaND: Learning to
Navigate from Disengagements. arXiv: 2010.04689
Kim, Z. W., 2008. Robust Lane Detection and Tracking in
Challenging Scenarios. IEEE Trans IEEE Transactions
on Intelligent Transportation Systems, Volume 9, Issue
1, pp. 16-26.
Kuzmic, J., Rudolph, G., 2020. Unity 3D Simulator of
Autonomous Motorway Traffic Applied to Emergency
Corridor Building. In Proceedings of the 5th
International Conference on Internet of Things, Big
Data and Security (IoTBDS), Volume 1: IoTBDS,
ISBN 978-989-758-426-8, pp. 197-204.
Li, P., Chen, X., Shen, S., 2019. Stereo R-CNN Based 3D
Object Detection for Autonomous Driving. Proceedings
of the IEEE/CVF Conference on Computer Vision and
Pattern Recognition (CVPR), pp. 7644-7652.
Nedevschi, S., Schmidt, R., Graf, T., Danescu, R., Frentui,
D., Marita, T., Oniga, F., Pocol, C., 2004. 3D lane
detection system based on stereovision. Intelligent
Transportation Systems. In Proceedings of the 7th
International IEEE Conference, pp. 161-166.
Pan, X., Shi, J., Luo, P., Wang, X., Tang, X., 2018. Spatial
As Deep: Spatial CNN for Traffic Scene
Understanding. AAAI Conference on Artificial
Intelligence (AAAI).
Tan, J., Zhang, T., Coumans, E., Iscen, A., Bai, Y., Hafner,
D., Bohez, S., Vanhoucke V., 2018. Sim-To-Real:
Learning Agile Locomotion For Quadruped Robots.
Proceedings of Robotics: Science and System XIV,
ISBN 978-0-9923747-4-7.
TensorFlow, 2020. TensorFlow Core v2.3.0 -
tf.keras.layers.Conv2D. Tensorflow.org. [online].
Available at: https://www.tensorflow.org/api_docs/
python/tf/keras/layers/Conv2D. Accessed: 13/09/2020.
Texas Instruments, 2021. Front camera. Automotive front
camera integrated circuits and reference designs.
Camera SerDes (DS90UB953-Q1). Ti.com. [online].
Available at: https://www.ti.com/solution/automotive-
front-camera. Accessed: 09/02/2021.
Tsuda, H., 2001. Nissan Demos New Lane Keeping
Products. Web.archive.org. [online]. Available at:
https://web.archive.org/web/20050110073214/http://iv
source.net/archivep/2001/feb/010212_nissandemo.htm
l. Accessed: 22/10/2020.
Wang, Y., Teoh, E. K., Shen, D., 2004. Lane detection and
tracking using B-Snake. Image and Vision Computing,
Volume 22, Issue 4, pp. 269-280.
Web.archive, 2005. Avoiding accidents. Webarchive.org.
[online]. Available at: https://web.archive.org/web
/20051017024140/http://www.developpement-
durable.psa.fr/en/realisation.php?niv1=5&niv2=52&ni
v3=2&id=2708. Accessed: 22/10/2020.
Winkel, S., 2020. Efficient lane detection for model cars in
simulation and in reality (German: Effiziente
Spurerkennung für Modellautos in Simulation und
Realität). Bachelor’s thesis, TU Dortmund University.
Yadav, P., 2015. Re: Which is best for image classification,
RGB or grayscale?. Researchgate.net. [online].
Available at: https://www.researchgate.net/post/
Which_is_best_for_image_classification_RGB_or_gra
yscale/55e962155dbbbd562d8b4591/citation/downloa
d. Accessed: 24/11/2020.
Zou, Q., Jiang, H., Dai, Q., Yue, Y., Chen, L., Wang, Q.,
2020. Robust Lane Detection from Continuous Driving
Scenes Using Deep Neural Networks. IEEE
Transactions on Vehicular Technology, Volume 69,
Issue 1, pp. 41-54.
Comparison between Filtered Canny Edge Detector and Convolutional Neural Network for Real Time Lane Detection in a Unity 3D
Simulator
155
