
Investigation on Stochastic Local Search for Decentralized Asymmetric
Multi-objective Constraint Optimization Considering Worst Case
Toshihiro Matsui
Nagoya Institute of Technology, Gokiso-cho Showa-ku Nagoya Aichi 466-8555, Japan
Keywords:
Asymmetric Distributed Constraint Optimization, Multi-Objective, Stochastic Local Search, Multiagent.
Abstract:
The Distributed Constraint Optimization Problem (DCOP) has been studied as a fundamental problem in
multiagent cooperation. With the DCOP approach, various cooperation problems including resource allocation
and collaboration among agents are represented and solved in a decentralized manner. Asymmetric Multi-
Objective DCOP (AMODCOP) is an extended class of DCOPs that formalizes the situations where agents
have individual objectives to be simultaneously optimized. In particular, the optimization of the worst case
objective value among agents is important in practical problems. Existing works address complete solution
methods including extensions with approximation. However, for large-scale and dense problems, such solution
methods are insufficient. Although the existing studies also address a few simple deterministic local search
methods, there are opportunities to introduce stochastic local search methods. As the basis for applying
stochastic local search methods to AMODCOPs for the preferences of agents, we introduce stochastic local
search methods with several optimization criteria. We experimentally analyze the influence of the optimization
criteria on perturbation in the exploration process of search methods and investigate additional information
propagation that extends the knowledge of the agents who are performing the local search.
1 INTRODUCTION
The Distributed Constraint Optimization Problem
(DCOP) has been studied as a fundamental prob-
lem in multiagent cooperation (Fioretto et al., 2018).
With the DCOP approach, various cooperation prob-
lems including resource allocation and collaboration
among agents are represented and solved in a decen-
tralized manner. Asymmetric Multi-Objective DCOP
(AMODCOP) is an extended class of DCOPs that
formalizes the situations where agents have individ-
ual objectives to be simultaneously optimized (Mat-
sui et al., 2018a). In particular, the optimization of
the worst case objective value among agents is im-
portant in practical problems. Existing works address
complete solution methods including extensions with
approximation. However, for large-scale and dense
problems, such solution methods are insufficient. Al-
though the current studies also address a few sim-
ple deterministic local search methods (Matsui et al.,
2018b), there are opportunities to introduce stochas-
tic local search methods. As the basis for applying
stochastic local search methods to AMODCOPs for
the preferences of agents, we introduce stochastic lo-
cal search methods with several optimization criteria.
We experimentally analyze the influence of the op-
timization criteria on perturbation in the exploration
process of the search methods. We also investigate ad-
ditional information propagation, which extends the
knowledge of the agents that are performing the local
search.
The contribution of this study is as follows. 1) We
apply several variants of a fundamental stochastic lo-
cal search method to a class of Asymmetric Multi-
Objective DCOPs where the worst case cost value
among agents is improved. 2) The effect of the
stochastic local search with different optimization cri-
teria is experimentally investigated, and we show the
cases where a leximin based criterion is effective with
the stochastic local search.
The rest of our paper is organized as follows. In
the next section, we present our preliminary study
that includes standard DCOPs, solution methods for
DCOPs, Asymmetric Multi-Objective DCOPs that
consider the worst case, social welfare, and the scal-
ability issues of solution methods for Asymmetric
Multi-Objective DCOPs. In Section 3, we pro-
pose decentralized stochastic local search methods for
AMODCOPs considering the worst case cost value
among agents. We apply fundamental stochastic lo-
462
Matsui, T.
Investigation on Stochastic Local Search for Decentralized Asymmetric Multi-objective Constraint Optimization Considering Worst Case.
DOI: 10.5220/0010395504620469
In Proceedings of the 13th International Conference on Agents and Artificial Intelligence (ICAART 2021) - Volume 1, pages 462-469
ISBN: 978-989-758-484-8
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

cal search methods with several optimization criteria
to this class of problems. We experimentally investi-
gate the proposed approach in Section 4. We briefly
discuss our work in Section 5 and conclude in Sec-
tion 6.
2 PRELIMINARY
We address a class of DCOPs where agents asymmet-
rically evaluate their local objectives, and multiple ob-
jectives of the agents are simultaneously optimized.
Our problem is based on the definition in (Matsui
et al., 2018a), and we mainly concentrate on the prob-
lems where the worst case cost among agents is min-
imized.
2.1 Distributed Constraint
Optimization Problems
A Distributed Constraint Optimization Problem
(DCOP) is defined by hA, X, D, Fi where A is a set of
agents, X is a set of variables, D is a set of the domains
of the variables, and F is a set of objective functions.
Variable x
i
∈ X represents a state of agent i ∈ A. Do-
main D
i
∈ D is a discrete finite set of values for x
i
.
Objective function f
i, j
(x
i
, x
j
) ∈ F defines a utility ex-
tracted for each pair of assignments to x
i
and x
j
. The
objective value of assignment {(x
i
, d
i
), (x
j
, d
j
)} is de-
fined by binary function f
i, j
: D
i
× D
j
→ N
0
. For as-
signment A of the variables, global objective function
F(A ) is defined as F(A ) =
∑
f
i, j
∈F
f
i, j
(A
↓x
i
, A
↓x
j
),
where A
↓x
i
is the projection of assignment A on x
i
.
The value of x
i
is controlled by agent i, which lo-
cally knows the objective functions that are related to
x
i
in the initial state. The goal is to find global opti-
mal assignment A
∗
that minimizes the global objec-
tive value in a decentralized manner. For simplicity,
we focus on the fundamental case where the scope of
constraints/functions is limited to two variables, and
each agent controls a single variable.
2.2 Solution Methods for DCOPs
The solution methods for DCOPs are categorized into
exact and inexact solution methods (Fioretto et al.,
2018). The former are based on tree search and dy-
namic programming (Fioretto et al., 2018). However,
the time/space complexity of such exact methods
is generally exponential for one of size parameters
of problems. Therefore, applying the exact meth-
ods to large-scale and densely constrained problems
is difficult. On the other hand, inexact solution meth-
ods consist of a number of approaches (Fioretto et al.,
2018) including hill-climbing local search, stochastic
random sampling and belief propagation.
In this study, we focus on Distributed Stochas-
tic search Algorithm (DSA) (Zhang et al., 2005; Zi-
van, 2008), which is a baseline algorithm of inexact
methods. DSA is the simplest stochastic local search
method for DCOPs where agents locally determine
the assignment to their own variables by exchanging
their assignments with neighborhood agents that are
related by constraints/functions. For each agent i, an
iteration of the algorithm is synchronously performed
as follows.
1. Set the initial assignment to variable x
i
of agent i.
2. Collect the current assignment of the variables of
the neighborhood agents in Nbr
i
. With the col-
lected assignment and functions related to agent i,
locally evaluate all the assignments of variable x
i
.
Then select a new assignment to x
i
with a stochas-
tic strategy and the evaluation for x
i
.
3. Update the assignment to x
i
. Repeat from step 2.
Each agent i has a view of assignments to the vari-
ables of the neighborhood agents Nbr
i
that is denoted
by A
i
. Agent i’s local cost is defined as f
i
(A
i
) =
∑
j∈Nbr
i
f
i, j
(A
i↓x
i
, A
i↓x
j
). Here we assume that A
i
also
contains i’s own assignment. The agent only interests
to improve its local cost value and does not receive
local cost values of other agents.
Although there are a few versions of stochas-
tic search strategies, most of them randomly select
1) hill-climb, 2) stay as is, or 3) switch to one of other
assignments to its own variable whose local objective
value equals the current local objective value. With
preliminary experimental investigation, we prefer the
following settings in this work. 1) If there are other
assignments to the agent’s own variable that improves
the local objective, the agent performs a hill-climb
with probability P
a
and randomly selects one of the
assignments related to the best improvement with uni-
form distribution. 2) Otherwise, the agent randomly
selects one of other assignments with probability P
b
.
With a relatively large P
a
and a relatively smaller P
b
,
the hill-climb and escape from local optimal solutions
are stochastically performed.
Although there are a number of sophisticated so-
lution methods for DCOPs, DSA is considered a base-
line method. Therefore, there are opportunities to
investigate the performance of the stochastic local
search for the problems based on min-max problems.
Several random-walk solution methods re-
quire/employ snapshot algorithms to capture global
objective values and related global solutions. A fun-
Investigation on Stochastic Local Search for Decentralized Asymmetric Multi-objective Constraint Optimization Considering Worst Case
463

variable of agent a
1
asymmetric constraint
x
1
x
2
x
3
x
4
local valuation of a
1
x
1
x
2
f
1,2
f
2,1
0 0 a b
0 1 c d
1 0 e f
1 1 g h
Figure 1: AMODCOP.
damental approach is based on a spanning tree on a
constraint graph and the implicit/explicit timestamps
of locally evaluated objective values to aggregate
them in a synchronized manner (Mahmud et al.,
2020). With such methods, global objective values
can be aggregated with the number of communication
cycles that equals the depth of the spanning tree.
A similar additional snapshot algorithm has been
applied to DSA (Zivan, 2008). Note that it is possible
to employ similar mechanism so that the agents
symmetrically and simultaneously collect snapshots
using the same single spanning tree, where each agent
performs as a root node of the spanning tree. Here
we concentrate on a solution method and employ
snapshots on a simulator for simplicity.
2.3 Asymmetric Multi-objective
Distributed Constraint
Optimization Problem
An Asymmetric Multiple Objective DCOP on the
preferences of agents (AMODCOP) is defined by
hA, X, D, Fi, where A, X and D are similarly defined
for the DCOP in Section 2.1. Agent i ∈ A has its local
problem defined for X
i
⊆ X . For neighboring agents
i and j, X
i
∩ X
j
6=
/
0. F is a set of objective functions
f
i
(X
i
). Function f
i
(X
i
) : D
i
1
× ··· × D
i
k
→ N
0
repre-
sents the objective value for agent i based on the vari-
ables in X
i
= {x
i
1
, ··· , x
i
k
}. For simplicity, we con-
centrate on the case where each agent has a single
variable and relates to its neighborhood agents with
binary functions. The functions are asymmetrically
defined and locally aggregated. Variable x
i
of agent
i is related to other variables by objective functions.
When x
i
is related to x
j
, agent i evaluates objective
function f
i, j
(x
i
, x
j
). On the other hand, j evaluates
another function f
j,i
(x
j
, x
i
). Each agent i has function
f
i
(X
i
) that represents the local problem of i that ag-
gregates f
i, j
(x
i
, x
j
). We define the local evaluation of
agent i as summation f
i
(X
i
) =
∑
j∈Nbr
i
f
i, j
(x
i
, x
j
) for
neighborhood agents j ∈ Nbr
i
related to i by objec-
tive functions.
Global objective function F(A ) is defined as
[ f
1
(A
1
), ··· , f
|A|
(A
|A|
)] for assignment A to all the
variables. Here A
i
denotes the projection of assign-
ment A on X
i
. The goal is to find assignment A
∗
that
minimizes the global objective based on a set of ag-
gregation and evaluation structures. Figure 1 shows
an example of AMODCOP.
2.4 Multiple Objectives and Social
Welfare
Since multiple objective problems among individual
agents cannot be simultaneously optimized in gen-
eral cases, several criteria such as Pareto optimality
are considered. However, there are generally a huge
number of candidates of optimal solutions based on
such criteria. Therefore, several social welfare and
scalarization functions are employed. With aggrega-
tion and comparison operators ⊕ and ≺, the mini-
mization of the objectives is represented as follows:
A
∗
= argmin
≺
A
⊕
i∈A
f
i
(A) .
Several types of social welfare (Sen, 1997) and
scalarization methods (Marler and Arora, 2004) are
employed to handle objectives. In addition to the
summation and comparison of scalar objective val-
ues, we consider several criteria based on the worst
case objective values (Matsui et al., 2018a). Although
some operators and criteria are designed for the maxi-
mization problems of utilities, we employ similar cri-
teria for minimization problems.
Summation
∑
a
i
∈A
f
i
(X
i
) only considers the total
utilities. Min-max criterion min max
a
i
∈A
f
i
(X
i
) im-
proves the worst case cost value. This criterion is
called the Tchebycheff function. Although it does not
consider global cost values and is not Pareto optimal,
the criterion to improve the worst case is practically
important in situations without trades of cost (util-
ity) values. To improve the global cost values, ties
of min-max are broken by comparing the summation
values, and the criterion is Pareto optimal. We em-
ploy the lexicographic augmented Tchebycheff func-
tion that independently compares maximum and sum-
mation values (Marler and Arora, 2004).
Lexmin for maximization problems is an exten-
sion of the max-min that is the maximization ver-
sion of min-max. With this criterion, utility values
are represented as a vector whose values are sorted
in ascending order, and the comparison of two vec-
tors is based on the dictionary order of the values in
the vectors. Maximization with leximin is Pareto op-
timal and relatively improves the fairness among ob-
jectives. We address ‘leximax’, which is an inverted
lexmin for minimization problems, where objective
values are sorted in descending order. See the liter-
ature for details (Sen, 1997; Marler and Arora, 2004;
Matsui et al., 2018a).
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
464

In this study, we mainly concentrate on improving
the worst case value, since it is a challenge for decen-
tralized local search methods.
To evaluate experimental results, we also consider
the Theil index T , which is a measurement of unfair-
ness: T =
1
|A|
∑
|A|
i=1
f
i
(X
i
)
f
ln
f
i
(X
i
)
f
, where f denotes
the average value for all f
i
(X
i
). T takes zero if all
f
i
(X
i
) are identical.
2.5 Scalability of Exact Solution
Methods and Stochastic Local
Search
Several exact solution methods based on tree search
and dynamic programming for AMODCOPs with
preferences for individual agents have been pro-
posed (Matsui et al., 2018a). However, such meth-
ods cannot be applied to large-scale and complex
problems with dense constraints/functions where the
tree-width of constraint graphs, which is related to
the number of combinations of assignments in partial
problems, is intractable. Although several approxi-
mations have been proposed for those types of solu-
tion methods (Matsui et al., 2018b), the accuracy of
the solutions decreases when a number of constraints
are eliminated from densely constrained problems.
Therefore, opportunities can be found for employ-
ing local search methods. Although several local
search methods were addressed in earlier studies for
such problems (Matsui et al., 2018b), stochastic local
search methods have not been adequately addressed.
Since such solution methods are an important class
of baseline methods, we focus on the stochastic local
search for AMODCOPs with variants of a min-max
criterion for the worst case cost value among agents.
3 DECENTRALIZED
STOCHASTIC LOCAL SEARCH
FOR AMODCOPS WITH
WORST CASE CRITERIA
3.1 Applying Stochastic Local Search to
AMODCOPs
To handle multiple objectives, the objective values
of other agents must be evaluated in addition to the
objective value of each agent even in a local search
with a narrow view. For Asymmetric Multi-Objective
problems, we adjusted the original DSA so that each
agent collects the local objective values of the neigh-
borhood agents. Each agent i repeats the following
steps in each iteration.
1. Set the initial assignment to variable x
i
of agent i.
2. Collect the current assignment of the variables of
the neighborhood agents in Nbr
i
. With the assign-
ment and functions related to each agent, evaluate
local objective value f
i
(A
i
) to the current assign-
ment.
3. Collect the current objective values f
j
of the
neighborhood agents j ∈ Nbr
i
. With the objective
values of the neighborhood agents, the current as-
signment and functions related to each agent, lo-
cally evaluate all the assignments to x
i
. Then se-
lect a new assignment with a stochastic strategy
and the evaluation of assignments of x
i
.
4. Update the assignment to variable x
i
of agent i.
Repeat from step 2.
Here we insert an additional step 3. Each agent up-
dates its current objective value based on a received
partial assignment to the variables of neighborhood
agents and then receives the current objective values
of the neighborhood agents. This step is necessary
to improve the consistency of the current assignment
and the related objective values.
The local evaluation is also modified to consider
the current cost values f
j
for neighborhood agents
j ∈ Nbr
i
. Although each agent can employ several so-
cial welfares and scalarization functions, their scope
is limited to the objective values of neighborhood
agents. In this work, it is assumed that all the agents
employ the same criterion in the optimization process
for a common goal.
3.2 Adjusting for the Criteria
With the modification of the collected information,
each agent has a view of the current objective values
of the neighborhood agents. In a local search, each
agent only evaluates the multiple objectives within the
view and the evaluation partially overlaps thoughout
the whole system.
An issue is that local evaluation with a criterion
of social welfare is inexact, and the choice of assign-
ments to variables might unexpectedly influence the
perturbation in the search process. For example, min-
imization of the maximum objective value might im-
prove perturbation more than the minimization of the
summation for the best solution based on a differ-
ent criterion. Therefore, we simultaneously employ
several different criteria to monitor and capture snap-
shots of the best solution. We capture the best solu-
tions based on different multiple criteria, although the
Investigation on Stochastic Local Search for Decentralized Asymmetric Multi-objective Constraint Optimization Considering Worst Case
465

search process is performed based on a single crite-
rion. As mentioned in Section 2.2, we capture snap-
shots of the best solutions by a simulator.
3.3 Considering Opposite Constraints
In the original problem setting, each agent locally ag-
gregates its own asymmetric constraints related to the
agent. However, when each agent locally searches
for the assignment to its variable, each agent cannot
evaluate the influence of the new assignment on the
neighborhood agents. By revealing the opposite part
of an asymmetric constraint to neighborhood agents,
the change of the objective values of the neighbor-
hood agents can also be evaluated. This might be too
optimistic, since each agent independently estimates
the improvement of the cost values.
3.4 Local Agreement
Since each agent locally determines the assignment to
its own variable, the selection usually causes a mis-
match among neighborhood agents. To reduce such
cases, we employ an agreement mechanism based on
a local leader election that resembles MGM (Fioretto
et al., 2018), which is a local search method for
DCOPs. For a leader election, an additional commu-
nication step is introduced as follows.
1. Set the initial assignment to variable x
i
of agent i.
2. Collect the current assignment of the variables of
the neighborhood agents in Nbr
i
. With the assign-
ment and functions related to each agent, evaluate
local objective value f
i
(A
i
) to the current assign-
ment.
3. Collect the current objective values f
j
of the
neighborhood agents j ∈ Nbr
i
. With the objective
values of the neighborhood agents, the current as-
signment and functions related to each agent, lo-
cally evaluate all the assignments to x
i
. Then se-
lect a new assignment with a stochastic strategy
and the evaluation of the assignment to x
i
. Com-
pute the improvement g
i
of the objective value by
the new assignment.
4. Collect the improvement g
j
of objective values of
the neighborhood agents j ∈ Nbr
i
. Evaluate the
best improvement value g
∗
k
among the neighbor-
hood agents with a tie-breaker based on the iden-
tifiers of the agents.
5. Update the assignment to a variable of agent i if
its improvement is the best value g
∗
i
. Repeat from
step 2.
In Step 4, agents compute the improvement g
i
of
the local evaluations and exchange information about
the improvement with the neighborhood agents. The
information of the improvement is the same type as
the information for the criterion of optimization. For
example, a sorted objective vector is exchanged for
leximax criterion.
3.5 Employing Global Information
Although each agent locally searches for the assign-
ment to its local value, there are opportunities to ac-
cess some global information. We employ global
objective values by assuming the snapshot methods
mentioned in Section 2.2. Here we simply employ
snapshots in a simulator by inserting a sufficient de-
lay of iterations that equals the number of agents so
that the agents do not access the global objective val-
ues too early.
While the global summation of objective val-
ues cannot be compared with the local evaluation of
each agent, the worst case objective value among the
agents can directly be a bound for each agent. There-
fore, we limit the locally worst case objective value
in each agent’s view by the globally worst case value.
The locally maximum cost value f
max
k
in a view of
agent i is limited by globally maximum cost value
F
max
as f
max
k
← min( f
max
k
, F
max
). In the case of lex-
imax, the globally maximum value is employed in-
stead of the first value in the sorted objective vector
of the ‘maximum’ cost values. We do not employ
this information when the optimization criterion is the
summation.
4 EVALUATION
4.1 Settings
We experimentally evaluated our proposed meth-
ods. The benchmark problems consist of n
agents/variables and c asymmetric constraints, which
are a pair of binary objective fictions for two agents.
Each variable takes a value in its domain that contains
d discrete values. We employed the following types
of cost functions for minimization problems. 1) rnd:
The cost values are randomly set to integer values
in [1, 100] based on uniform distribution. 2) gmm:
The cost values are random integer values in [1, 100]
that are rounded down from random values based on
gamma distribution with α = 9 and β = 2.
In a stochastic local search, one of the following
criteria is employed. 1) sum: The summation of the
objective values in the view of each agent. 2) max:
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
466
300
350
400
450
500
550
600
650
0 50 100 150 200
max. cost
second
sum sumo
maxg maxo
msg mso
lxmg lxgoa
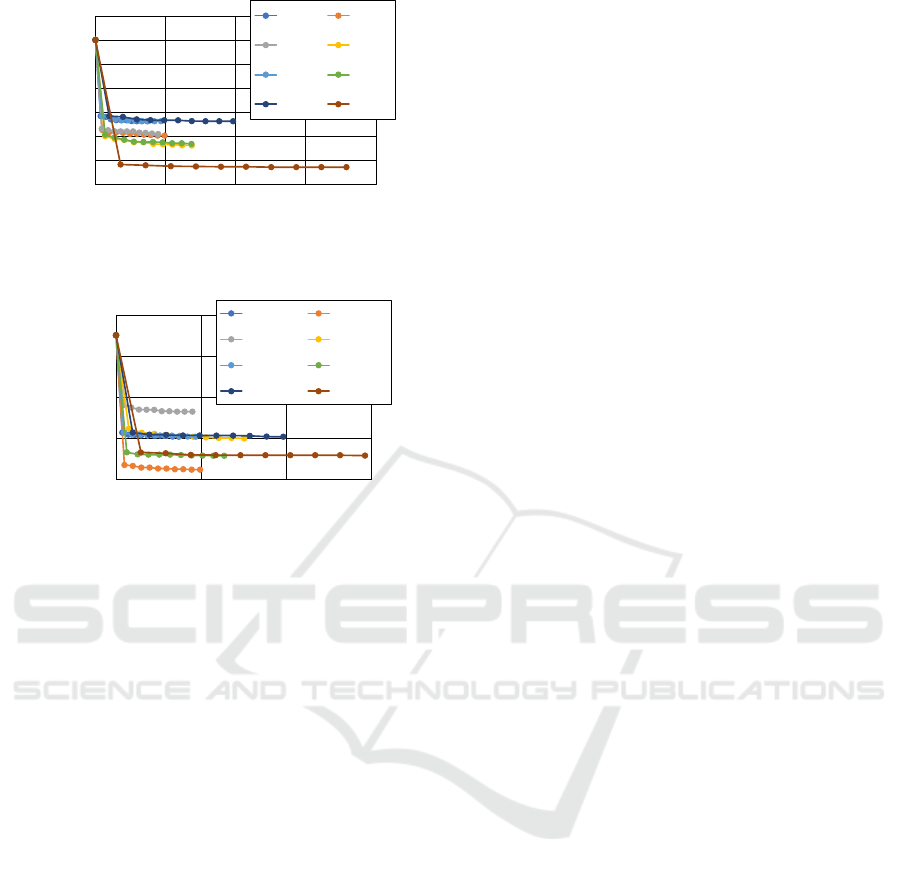
Figure 2: Example of anytime curve (rnd, n = 100, d = 3,
c = 250, (P
a
, P
b
) = (0.9, 0.1), max. cost).
18000
20000
22000
24000
26000
0 50 100 150
sum. cost
second
sum sumo
maxg maxgoa
msg msa
lxmg lxma
Figure 3: Example of anytime curve (rnd, n = 100, d = 3,
c = 250, (P
a
, P
b
) = (0.9, 0.1), sum. cost).
The maximum of the objective values in the view of
each agent. 3) ms: An extension of ‘max’ where ties
are broken by ‘sum’. 4) lxm: The leximax criteria for
cost values that is similar to leximin for utility values.
These criteria are also employed to capture snapshots
of the best solutions in each iteration. We captured
four different best solutions based on different crite-
ria, including the one for optimization. We also eval-
uated the Theil index values for the solutions.
For stochastic searches, we set probabilities
(P
a
, P
b
) = (1, 0) and (0.9, 0.1) by preliminary exper-
iments. The former setting is a deterministic local
search method.
We denote the additional mechanisms in Section 3
as follows. 1) (none): base method. 2) o: evaluation
of part of the opposite objective functions. 3) a: local
agreement with neighborhood agents. 4) g: modifica-
tion of local evaluation by globally worst cost value.
These are added to the names of optimization criteria
(e.g. ‘maxgoa’).
We compared the best solutions that are captured
with several criteria at the cutoff iteration 200000.
The results are averaged over ten trials with differ-
ent initial solutions on ten problem instances for each
setting.
4.2 Results
Table 1 shows the solution quality for ‘rnd’, n = 50,
d = 3, c = 150 and (P
a
, P
b
) = (1, 0)). For each op-
timization criterion, we selected the variants of so-
lution that result the best maximum and summation
cost values. In this result, the solution quality of the
variants of ‘max’ was relatively worse than the oth-
ers. A possible reason is that the search can easily be
captured by locally optimal solutions, since the local
search process is deterministic in these settings. The
results of ‘ms’ and ‘lxm’ that are assisted by addi-
tional characteristics of the criteria are relatively bet-
ter. In particular, ‘lxm’ with ‘oa’ significantly out-
performed the other methods for the maximum cost
value. It can be considered that the effect of leximax
to improve fairness by comparing more than secondly
worst cases might also improved the local search. In
addition, several variants of ‘lxm’ relatively improved
the Theil index. It reveals the possibility that the prop-
erty of leximax to improve fairness is effective in sev-
eral settings of local search.
Tables 2 and 3 show the solution quality in the
case of ‘rnd’ and (P
a
, P
b
) = (0.9, 0.1). In these cases,
the solution quality of variants of ‘max’ was relatively
better in comparison to the deterministic search. It is
considered the effect of the stochastic escape form lo-
cally optimal solutions. With additional information,
the solution quality was improved in several cases.
Although ‘o’ that referred opposite cost functions was
too optimistic without different additional informa-
tion in several cases, it was effective with some addi-
tional information. We found that ‘g’ that employed
the global min-max values looks improved the vari-
ants of ‘max’ in a few cases. However, the effect
decreased by employing other types of additional in-
formation. As mentioned above, several variants of
‘lxm’ were relatively better, while its computational
overhead to maintain sorted objective vectors is sig-
nificantly higher than ‘max’.
Table 4 shows the solution quality in the case of
gmm, n = 50, d = 3, c = 150 and (P
a
, P
b
) = (0.9, 0.1).
Here, the effectiveness of the solution methods was
different from the previous cases. It can be consid-
ered that the non-uniform distribution of cost values
prevented some cooperative evaluation among neigh-
borhood agents.
Figures 2 and 3 show typical anytime curves of
maximum and summation cost values in a case of
‘rnd’. The snapshots of cost values are independently
captured with the globally maximum and summation
values. Since the evaluated optimization criteria need
different computational overheads, we plot the re-
sults considering computational time. This experi-
Investigation on Stochastic Local Search for Decentralized Asymmetric Multi-objective Constraint Optimization Considering Worst Case
467

Table 1: Solution quality (rnd, n = 50, d = 3, c = 150, (P
a
, P
b
) = (1, 0)).
alg. sum max ms lxm
max. sum. theil max. sum. theil max. sum. theil max. sum. theil
sum 537.1 12224.4 0.1070 449.1 12926.0 0.0915 449.1 12902.6 0.0922 449.1 12912.2 0.0917
suma 536.5 12160.2 0.1107 466.2 12572.0 0.0995 466.2 12565.0 0.0996 466.2 12593.1 0.0991
maxo 536.4 13443.6 0.0834 480.2 14053.7 0.0730 480.2 14014.6 0.0725 480.2 14047.3 0.0725
ms 537.1 12224.4 0.1070 449.1 12926.0 0.0915 449.1 12902.6 0.0922 449.1 12912.2 0.0917
msa 536.5 12146.2 0.1148 462.6 12711.9 0.0972 462.6 12678.5 0.0974 462.6 12696.4 0.0977
msg 537.1 12224.4 0.1070 449.1 12926.0 0.0915 449.1 12902.6 0.0922 449.1 12912.2 0.0917
lxma 528.9 12160.3 0.1117 458.8 12766.4 0.0963 458.8 12745.6 0.0971 458.8 12760.3 0.0964
lxmgoa 410.7 13061.3 0.0631 394.1 13308.0 0.0570 394.1 13196.0 0.0581 394.1 13266.9 0.0569
lxmoa 410.7 13061.3 0.0631 394.1 13308.0 0.0570 394.1 13196.0 0.0581 394.1 13266.9 0.0569
Table 2: Solution quality (rnd, n = 50, d = 3, c = 150, (P
a
, P
b
) = (0.9, 0.1)).
alg. sum max ms lxm
max. sum. theil max. sum. theil max. sum. theil max. sum. theil
sumo 486.1 11371.2 0.1075 391.8 12150.1 0.0822 391.8 12115.7 0.0823 391.8 12156.2 0.0820
maxgoa 532.6 12214.8 0.1047 431.9 13033.2 0.0780 431.9 12859.9 0.0822 431.9 13004.5 0.0764
maxo 476.9 12523.4 0.0841 391.1 13277.3 0.0593 391.1 13270.7 0.0591 391.1 13277.4 0.0586
msa 517.7 11907.9 0.1135 426.6 12541.6 0.0929 426.6 12519.7 0.0932 426.6 12534.3 0.0930
mso 477.4 12512.4 0.0844 391.7 13321.3 0.0585 391.7 13316.8 0.0587 391.7 13320.5 0.0587
lxma 508.4 11872.4 0.1109 420.9 12579.0 0.0898 420.9 12548.6 0.0904 420.9 12581.1 0.0896
lxmgoa 391.2 12459.9 0.0641 369.4 12973.6 0.0554 369.4 12748.6 0.0576 369.4 12986.5 0.0524
lxmoa 391.2 12459.9 0.0641 369.4 12973.6 0.0554 369.4 12748.6 0.0576 369.4 12986.5 0.0524
Table 3: Solution quality (rnd, n = 100, d = 3, c = 250, (P
a
, P
b
) = (0.9, 0.1)).
alg. sum max ms lxm
max. sum. theil max. sum. theil max. sum. theil max. sum. theil
sumo 512.5 18690.5 0.1402 389.7 20282.9 0.1140 389.7 20235.7 0.1141 389.7 20269.8 0.1140
maxgoa 531.9 19829.8 0.1169 383.5 20971.4 0.0937 383.5 20811.9 0.0948 383.5 20948.5 0.0923
maxo 477.5 21242.9 0.1010 377.9 22416.4 0.0798 377.9 22393.9 0.0796 377.9 22406.0 0.0795
msa 527.7 19173.4 0.1435 413.3 20228.6 0.1276 413.3 20182.9 0.1283 413.3 20228.4 0.1273
mso 468.9 21209.3 0.0997 379.4 22350.2 0.0807 379.4 22342.2 0.0808 379.4 22354.8 0.0806
lxma 518.5 19199.3 0.1409 412.5 20387.0 0.1254 412.5 20314.6 0.1256 412.5 20376.5 0.1250
lxmgoa 352.0 20376.1 0.0793 334.4 21292.6 0.0706 334.4 20765.7 0.0757 334.4 21161.3 0.0703
lxmoa 352.0 20376.1 0.0793 334.4 21292.6 0.0706 334.4 20765.7 0.0757 334.4 21161.3 0.0703
Table 4: Solution quality (gmm, n = 50, d = 3, c = 150, (P
a
, P
b
) = (0.9, 0.1)).
alg. sum max ms lxm
max. sum. theil max. sum. theil max. sum. theil max. sum. theil
sumo 177.3 4483.9 0.0794 153.5 4719.7 0.0697 153.5 4697.8 0.0699 153.5 4723.8 0.0691
maxo 166.5 4711.4 0.0677 145.5 4938.3 0.0569 145.5 4899.7 0.0577 145.5 4930.6 0.0568
msa 178.7 4555.6 0.0811 160.8 4706.6 0.0741 160.8 4696.0 0.0743 160.8 4711.3 0.0737
mso 165.9 4699.4 0.0673 145.9 4936.2 0.0572 145.9 4908.9 0.0581 145.9 4937.9 0.0570
lxma 181.2 4557.4 0.0815 160.1 4726.0 0.0726 160.1 4700.4 0.0732 160.1 4720.9 0.0725
lxmo 164.6 4708.6 0.0664 145.8 4948.7 0.0563 145.8 4919.7 0.0564 145.8 4940.4 0.0564
ment is performed on a computer with g++ (GCC)
4.4.7, Linux version 2.6, Intel(R) Core(TM) i7-3770K
CPU @ 3.50GHz and 32GB memory. Note that there
are opportunities to improve our experimental imple-
mentation.
For each optimization criterion, we selected the
fastest variant and the best-solution-quality variant.
While the optimization process with complex crite-
ria and more additional information results relatively
better solutions, the process with ‘light’ criteria has
chance to perform more iterations. However, for min-
max cost values of relatively large-scale problems, the
best variant of ‘lxm’ optimization was relatively bet-
ter. We note that for ‘max’, ‘ms’ and ‘lxm’ variants,
employing snapshots of globally maximum cost val-
ues were slightly faster than the simplest one. This
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
468

was a side-effect where part of evaluation was con-
ditionally skipped due to the threshold based on the
globally maximum cost value.
5 DISCUSSION
There are several decentralized min-max problem set-
tings that require several assumptions including the
convexity and continuity of objective functions. How-
ever, the aim of DCOPs with similar criteria is general
discrete problems with non-convexity. To solve large-
scale and complex problems of these classes, inexact
methods are necessary. As a baseline investigation,
we addressed a class of stochastic hill-climb methods
that is an extension of a fundamental approach for tra-
ditional DCOPs.
An approximation of complete solution methods
for AMODCOPs that are based on tree search and dy-
namic programming has been presented. However,
since the approximation partially eliminates or ig-
nores several constraints, its accuracy decreases when
the induced width (Fioretto et al., 2018) of constraint
graphs is relatively larger. In such situations, there are
opportunities to employ stochastic local search meth-
ods. While deterministic local search methods for this
class of problems have been addressed in early stud-
ies, we investigated stochastic local search methods
that also employ some additional information.
In the original DSA and several variants, the prob-
ability of the algorithms is generally employed to de-
termine whether the agents select the hill-climb or
stay as is. Therefore, the methods are basically local
search that cannot escape from locally optimal solu-
tions. We mainly investigated the practical case where
the agents are basically greedy but stochastically es-
cape from locally optimal solutions.
6 CONCLUSION
We investigated the decentralized stochastic search
methods for Asymmetric Multi-Objective Distributed
Constraint Optimization Problems considering the
worst cases among the agents. The experimental
results show the effect and influence of different
optimization criteria and additional information in
stochastic local search processes. In particular, the re-
sults show that the minimization of the maximum cost
value is not straightforward with min-max based cri-
teria that are also designed to improve the global ob-
jective value or fairness. Min-max optimization with
several additional bits of information performs better
perturbation. We believe such an investigation of fun-
damental search methods for different optimization
criteria can provide a foundation for more sophisti-
cated sampling based methods for extended classes
of DCOPs. Our future work will investigate other
stochastic and sampling-based algorithms with fair-
ness and Pareto optimality.
ACKNOWLEDGEMENTS
This work was supported in part by JSPS KAKENHI
Grant Number JP19K12117.
REFERENCES
Fioretto, F., Pontelli, E., and Yeoh, W. (2018). Distributed
constraint optimization problems and applications: A
survey. Journal of Artificial Intelligence Research,
61:623–698.
Mahmud, S., Choudhury, M., Khan, M. M., Tran-Thanh,
L., and Jennings, N. R. (2020). AED: An Anytime
Evolutionary DCOP Algorithm. In Proceedings of the
19th International Conference on Autonomous Agents
and MultiAgent Systems, pages 825–833.
Marler, R. T. and Arora, J. S. (2004). Survey of
multi-objective optimization methods for engineer-
ing. Structural and Multidisciplinary Optimization,
26:369–395.
Matsui, T., Matsuo, H., Silaghi, M., Hirayama, K., and
Yokoo, M. (2018a). Leximin asymmetric multiple
objective distributed constraint optimization problem.
Computational Intelligence, 34(1):49–84.
Matsui, T., Silaghi, M., Okimoto, T., Hirayama, K., Yokoo,
M., and Matsuo, H. (2018b). Leximin multiple objec-
tive dcops on factor graphs for preferences of agents.
Fundam. Inform., 158(1-3):63–91.
Sen, A. K. (1997). Choice, Welfare and Measurement. Har-
vard University Press.
Zhang, W., Wang, G., Xing, Z., and Wittenburg, L. (2005).
Distributed stochastic search and distributed breakout:
properties, comparison and applications to constraint
optimization problems in sensor networks. Artificial
Intelligence, 161(1-2):55–87.
Zivan, R. (2008). Anytime local search for distributed con-
straint optimization. In Twenty-Third AAAI Confer-
ence on Artificial Intelligence, pages 393–398.
Investigation on Stochastic Local Search for Decentralized Asymmetric Multi-objective Constraint Optimization Considering Worst Case
469
