
CHILDATTEND: A Neural Network based Approach to Assess
Child Attendance in Social Project Activities
Jo
˜
ao Vitor Andrade Estrela
a
and Wladmir Cardoso Brand
˜
ao
b
Department of Computer Science, Pontifical Catholic University of Minas Gerais (PUC Minas), Belo Hozizonte, Brazil
Keywords:
Children Identification, Face Detection, Face Recognition, Image Alignment, Neural Network.
Abstract:
Social project sponsors demand transparency in the application of donated resources. A challenge for non-
governmental organizations that support children is to provide proof of children’s participation in social project
activities for sponsors. Additionally, the proof of participation by roll call or paper reports is much less con-
vincing than automatic attendance checking by image analysis. Despite recent advances in face recognition,
there is still room for improvement when algorithms are fed with only one instance of a person’s face, since
that person can significantly change over the years, especially children. Furthermore, face recognition algo-
rithms still struggle in special cases, e.g., when there are many people in different poses and the photos are
taken under variant lighting conditions. In this article we propose a neural network based approach that ex-
ploits face detection, face recognition and image alignment algorithms to identify children in activity group
photos, i.e., images with many people performing activities, often on the move. Experiments show that the
proposed approach is fast and identifies children in activity group photos with more than 90% accuracy.
1 INTRODUCTION
According to the United Nations (UN)
1
, non-
governmental organizations (NGOs) are task-oriented
nonprofit organizations driven by people focused in
performing a variety of service and humanitarian
functions. In particular, Charity NGOs are opera-
tional organizations that meet the needs of disadvan-
taged people and groups, usually being funded by do-
nations from sponsors. Similarly to all other organi-
zations, NGOs need to be open about their goals, and
donor sponsors expect that they demonstrate the same
level of transparency and accountability as the private
organizations. Thus, credibility is crucial for dona-
tions to continue to flow.
Some Charity NGOs are specialized in support-
ing children, many of them developing social projects
that promote children’s active participation in cultural
and educational activities. A challenging problem for
these associations is to provide sponsors with proof
of children’s participation in social project activities.
The automatic verification of attendance by image
analysis is much more convincing than a paper list
a
https://orcid.org/0000-0001-9348-0215
b
https://orcid.org/0000-0002-1523-1616
1
https://research.un.org/en/ngo
or report. Therefore, the use of image analysis tech-
niques, such as algorithms for detecting and recogniz-
ing faces, to assess the frequency of children in social
project activities is fundamental to the transparency
and credibility of NGOs.
Face detection and recognition are two different
tasks that demand separate techniques (Hjelm
˚
as and
Low, 2001; Zhao et al., 2003). Face detection, in par-
ticular, is an essential step for face recognition. It is a
specific case of object-class detection which has been
widely studied for decades. Consequently, several al-
gorithms and methods have been developed over the
years in order to address this task (Ming-Hsuan Yang
et al., 2002). Face recognition, on the other hand, is
applied to faces that have already been detected. This
technique, in turn, is most commonly used for per-
son identification and authentication (Zulfiqar et al.,
2019). Yet, it can be used for a variety of tasks (Zhao
et al., 2003), such as unlocking devices (Patel et al.,
2016), paying for services and products (Li et al.,
2017), identifying criminals (Sharif et al., 2016) and
assessing people attendance (Kawaguchi et al., 2005).
Face identification is the process of comparing se-
lected facial features of one’s face against a preexist-
ing set of faces (Guillaumin et al., 2009). In other
words, it is the attempt to answer the question ”Who
are you?”. This process can also be referred to as a
602
Estrela, J. and Brandão, W.
CHILDATTEND: A Neural Network based Approach to Assess Child Attendance in Social Project Activities.
DOI: 10.5220/0010400406020609
In Proceedings of the 23rd International Conference on Enterprise Information Systems (ICEIS 2021) - Volume 1, pages 602-609
ISBN: 978-989-758-509-8
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

1:N relation, or one-to-many matching. Face authen-
tication, in turn, is the process of comparing one face
to another single face, consisting of a 1:1 relation, or
one-to-one matching. This process is used to validate
a claimed identity based on the image of a face, i.e.,
the objective is to answer the question ”Is this really
you?”. Although the two processes are different, both
can be referred to as face recognition for simplicity.
There are many issues that must be addressed to
detect and recognize faces in an image (Hjelm
˚
as and
Low, 2001; Ming-Hsuan Yang et al., 2002; Jafri and
Arabnia, 2009; Malikovich et al., 2017). One prob-
lem is lighting, i.e., the input images can present dif-
ferent lighting conditions depending on the quality of
the device used to take the photo and the environment
lighting condition (Peixoto et al., 2011). Another
problem is the angle of the faces (Zhu and Ramanan,
2012). Ideally, every face should have a frontal ar-
rangement. Nonetheless, usually faces are positioned
slightly sideways, which many times hinders the pro-
cess of detection. For that reason, the extraction of
high-quality facial features is crucial for maximizing
the accuracy of the face recognition algorithm.
In this article we propose CHILDATTEND, a neu-
ral network based approach that exploits face detec-
tion and recognition and image alignment algorithms
to assess child attendance in social project activities
by identifying children in activity group photos. Par-
ticularly, the proposed approach uses a set of images
to train a neural network in a labeling task. Exper-
imental results show that CHILDATTEND is efficient
and effective, being able to label children in activity
group photos within a few seconds while providing
accuracy of approximately 90%. The main contribu-
tions of this article are:
• A novel neural network approach to assess child
attendance in social project activities, which uses
an efficient and effective face detector, along with
a face recognition algorithm based on the Eu-
clidean distance.
• A thoroughly evaluation of the proposed approach
using a comprehensive image dataset within 4 dif-
ferent face detection algorithms.
In the remaining of this article, Section 2 presents
theoretical background on face detection and recogni-
tion, including three research questions derived from
previous experiments reported in literature. Section 3
presents the related work. Section 4 presents CHIL-
DATTEND, our proposed approach. Sections 5 and
6 present the experimental setup and results, respec-
tively. Finally, Section 7 presents the conclusions and
directions for future work.
2 BACKGROUND
Many face detection and recognition algorithms have
been proposed in the past years (Jafri and Arabnia,
2009; Kumar et al., 2019). The Viola-Jones algo-
rithm (Viola and Jones, 2001) demands full view
frontal upright faces, performing face detection in
four stages: Haar feature selection, creation of an in-
tegral image, Adaboost training and cascading classi-
fiers. In particular, it uses a small number of features
and a “cascade” model which allows false positive
regions of the image to be quickly discarded while
spending more computation on promising object-like
regions. Thus, it is very fast and presents high detec-
tion rate. In addition, it does not require much compu-
tational work, for this being widely used in real-time
applications. However, it performs poorly for rotated
or occluded faces, and under exploits issues that may
hinder the detection of the face.
In feature-based approaches for face recognition,
the input image must be processed to identify and ex-
tract distinctive facial features such as the eyes, mouth
and nose, the geometric relationships among facial
points must be computed, and the facial image must
be reduced to a vector of geometric features. In this
process, it is crucial to evaluate and test data nor-
malization strategies (Hazim, 2016) to improve the
quality of feature extraction. Additionally, statistical
pattern recognition techniques must be used to match
faces using the geometric measurements.
The Euclidean Distance (Liwei Wang et al., 2005)
is a very common metric that is broadly used in sev-
eral applications. It is a fast and efficient way to calcu-
late the distance between two vectors. In face recog-
nition, the vectors represent features of the faces that
are being compared. Thus, the greater the Euclidean
distance, the less faces are similar. Usually, one sin-
gle 128D embedded vector representing the face in
a Euclidean space of 128 dimensions are required to
calculate the Euclidean distance. However, it is possi-
ble to re-sample the face before extracting the vector.
The number of re-samples is called “number of jit-
ters”. It is intuitive to consider that the increase in
the number of jitters might increase the accuracy of
the face recognition algorithm, since it might create a
more general representation of the face.
3 RELATED WORK
There are four categories of face detection meth-
ods (Ming-Hsuan Yang et al., 2002): i) knowledge-
based where human knowledge on what constitutes
a face is encoded and the relationship between fa-
CHILDATTEND: A Neural Network based Approach to Assess Child Attendance in Social Project Activities
603

cial features is captured; ii) feature-invariant to look
for possible existent structural features of a face even
when there are variations in different conditions such
as viewpoint, lighting and pose; iii) template match-
ing where many patterns are stored to describe the
face as a whole or the facial features separately;
iv) appearance-based using a set of training images
to capture and learn the representative variability of
faces.
A reliable algorithm for object detection (Dalal
and Triggs, 2005) uses a feature extractor to ob-
tain image descriptors and a Linear Support Vector
Machine (SVM) (Cortes and Vapnik, 1995) to train
highly accurate object classifiers. Different from the
Viola-Jones algorithm (Viola and Jones, 2001), it
counts the occurrences of gradient vectors that repre-
sent the light direction to select image segments. On
top of that, overlapping local contrast normalization
is used to improve accuracy.
Multi-task cascaded convolutional neural net-
works (CNN) were trained to make three types of
predictions: face classification, bounding box regres-
sion and facial landmark localization (Zhang et al.,
2016). First, the image is re-scaled to a range of dif-
ferent sizes (called an image pyramid). Then, the P-
Net uses a shallow CNN, which proposes candidate
facial regions. Next, the R-Net filters the bounding
boxes by refining the windows to reject a large num-
ber of non-faces windows through a more complex
CNN. Finally, the O-Net proposes five facial land-
marks, which are: left eye, right eye, nose, left mouth
corner and right mouth corner. Different from the
other aforementioned algorithms, this algorithm soft-
ens the impact of many problems that weren’t previ-
ously taken into account by other detectors, e.g., pose
variation and bad lighting.
The YOLO algorithm (Redmon and Farhadi,
2018) uses a softmax function along with multi-label
classification for face classification. Considering the
accuracy of the detection, this algorithm presented a
much higher detection rate compared to that of other
detectors. Previous experiments show that conditions
such as occlusion, poor lighting, variation in pose and
rotation no longer hinder the facial detection process.
Additionally, the YOLO detector performs substan-
tially faster than the previously cited detectors.
Some systems to take the attendance of stu-
dents in class have been proposed in the past
years (Kawaguchi et al., 2005). In such systems, the
images of the students’ faces are stored with their
names and ID codes in a database. In addition, the
data of students observed during 79 minutes were
used, yielding multiple faces of the same person. Dif-
ferent from these systems, our proposed approach
only have one image of each person available, i.e.,
it identifies faces with a single instance of training
data. In other words, CHILDATTEND is a one-shot
face recognition system.
Recently, a novel approach detects and identifies
faces in images with multiple people (Bah and Ming,
2019). Particularly, the Haar face detector is used to
detect faces, which are then used as input to a face
recognition mechanism. Additionally, considering
the accuracy of the algorithms, the authors evaluate
the Haar classifier, the Local binary patterns (LBP)
classifier and its improved versions. Different from
this approach, we evaluate the accuracy of four dif-
ferent face detectors and we use a single face recog-
nition approach with Resnet to extract face encodings
and the Euclidean distance to measure the similarities
between the faces.
4 CHILDATTEND APPROACH
In this section we present our proposed approach.
In particular, we use two face detectors, Haar and
YOLO. Our choice was based on the experimental re-
sults in order to maximize the accuracy of the process
while maintaining a reasonably high speed. It is im-
portant to remember that to recognize a face, we first
need an “example” of that face. Figure 1 shows the
insert strategy to add a new person. This strategy was
adopted to test and evaluate the following research
questions:
• How do gray-scale images affect the accuracy of
the face recognition in different types of images?
• Will the accuracy of the face recognition increase
if we align the faces beforehand?
4.1 The Insertion Strategy
From Figure 1, we observe that the first step of the
insertion strategy is face detection. The Haar detector
receives the input image and if it fails to locate a face
in the image, we use the second YOLO detector. If
neither detector locates a face in the image, the pro-
cess ends, else we extract the face coordinates (left,
top, width and height).
In the next step, we align the cropped face using
face landmarks. First, we compute the center of mass
for each eye, then we compute the angle between the
eye centroids. Next, we calculate the correct position
of the eyes and set the scale of the new resulting im-
age by taking the ratio of the distance between eyes in
the current image to the ratio of distance between eyes
in the desired image. Finally, we compute the center
ICEIS 2021 - 23rd International Conference on Enterprise Information Systems
604
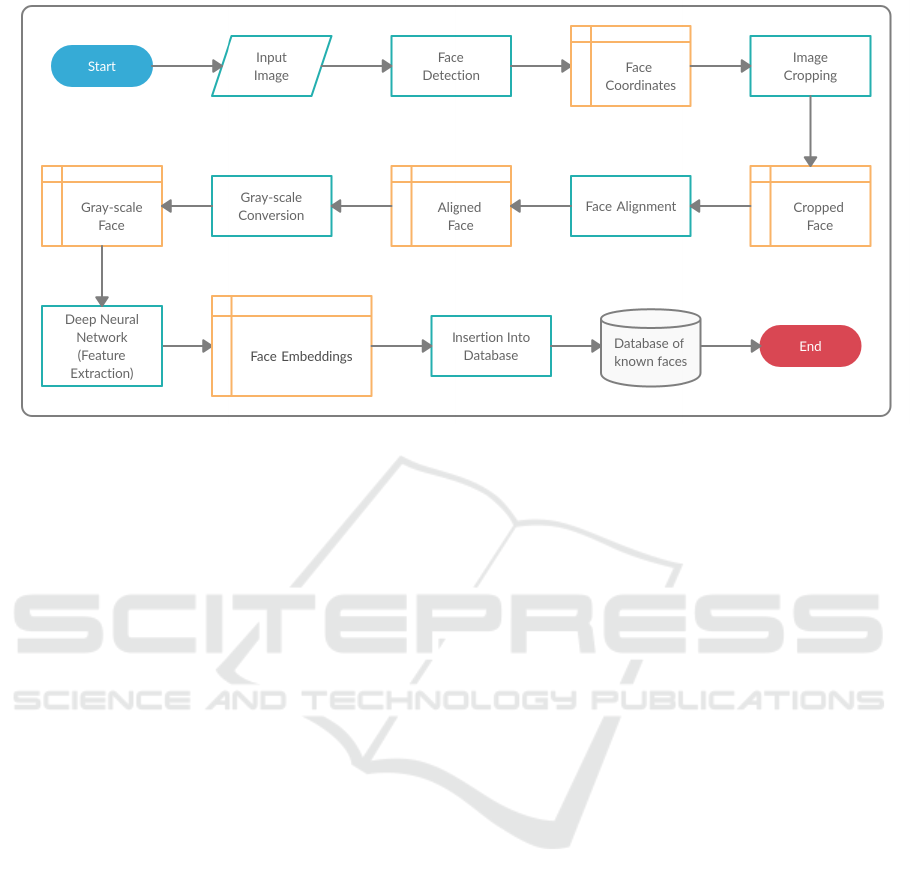
Figure 1: General workflow of our insertion strategy.
coordinates, the median point between the two eyes
in the input image. After this process, we have our
aligned and resized face of 256x256 pixels. Resizing
is a form of normalization to guarantee that all images
have the same resolution. Additionally, a smaller res-
olution makes the algorithms run faster without los-
ing accuracy. After the image is aligned, we convert
it from RGB to gray-scale.
The final step is feature extraction, where we ex-
tract the facial features using a Resnet that maps hu-
man faces into 128D vectors. The model is a ResNet
with 29 convolutional layers. It is essentially a ver-
sion of the ResNet-34 network (He et al., 2016) with
a few layers removed and the number of filters per
layer reduced by half. After we have the 128D vector
that represents the face, we insert it into our database
of known faces.
4.2 The Recognition Strategy
Different from the insertion strategy, in the recogni-
tion strategy we only use the YOLO detector, since it
outperforms Haar in images with lighting issues and
with several people in many different positions. Par-
ticularly, in the detection step it receives a completely
new image as input. Next, it detects the faces, yield-
ing a list of face coordinates that can contain one or
more face locations. The next steps are exactly the
same as in the insertion process. For each face located
in the image, the algorithm crops, aligns and resizes
it. This gives us a list of aligned cropped faces, each
with a resolution of 256x256 pixels. We then convert
each aligned face to gray-scale. Now that we have a
list of aligned faces in gray-scale that was outputted
by the face detector, we enter the recognition stage, in
which a neural network is used to extract the features
of each face. After the process of feature extraction
is complete, we have a brand new list of 128D vec-
tor representations (embeddings) of the faces found
in the new input image.
In the last stage of the recognition, we compare
the faces by their levels of similarity. The 1:N com-
parison is done using the Euclidean distance. For each
vector in the new list of vectors, we calculate its dis-
tance to every other vector previously inserted into
our database. And, as previously noted, the smallest
distance is used to find the label of the recognized per-
son. However, the smallest Euclidean distance must
be less or equal than a previously chosen threshold,
otherwise the algorithm will label the face as ’Un-
known’.
5 EXPERIMENTAL SETUP
In this section, we describe the experimental setup
that supports our investigation. Particularly, we ad-
dress the following research questions:
• How does the change in the number of jitters im-
pact the accuracy of the face recognition?
• How does the color of the image impact the accu-
racy of the face recognition?
• Will the accuracy of the face recognition increase
if we align the faces beforehand?
CHILDATTEND: A Neural Network based Approach to Assess Child Attendance in Social Project Activities
605

5.1 Dataset
Our data consists of two different sets. The first
set contains 18 pictures of individual children’s front
faces with good lighting conditions and the second
set contains 23 images, most of them characterized
by groups of people (including adults and children),
and the same people who are present in the first set of
images of individual faces are also present in the im-
ages in the second set. Each of the images of groups
of people in the second set was analysed manually.
Thus, we created a third set by combining the two pre-
vious sets, selecting some images from the second set
and discarding others. This third new set is described
as follows:
• It contains 36 images of 18 people, with 2 distinct
images of each person in different conditions.
• One image contains the person’s front face, with
good lighting and without occlusion. The other
image is a photo of the same person, only in dif-
ferent conditions, which include occlusion, bad
lighting and different poses. Additionally, some
looked older because it is natural for children’s
faces to change considerably over the years.
• The images have different resolutions, ranging
from 283x565 to 3888x6912 pixels. However,
after the process of alignment described in Sec-
tion 4.1, they present the same resolution of
256x256 pixels.
5.2 Experimental Procedures
Figure 2 shows the workflow of the experimental pro-
cedures we used to evaluate our proposed approach.
Figure 2: Workflow of our experimental procedures.
From Figure 2 we observe that the leftmost input im-
age (Image 1) represents a front face with good light-
ing and without occlusion. The rightmost input im-
age (Image 2) represents an angled face with poor
lighting and occlusion. As usual, we first detect the
faces in the images. Four different face detectors were
evaluated in our experiments: i) Haar
2
; ii) HOG
3
; iii)
MTCNN
4
, and; iv) YOLO
5
.
Additionally, we extract the face embeddings by
using ResNet
6
from each face in each image and com-
pare them using the Euclidean distance. The output
of this process is a number between 0 and 1, which
gives us the level of similarity between the faces, that
is, the higher the value (closer to 1), the more differ-
ent the two faces are. Therefore, a reduction in the
Euclidean distance would mean an increase in the ac-
curacy of the face recognition algorithm, considering
that the comparison is done using two different pho-
tos of the same person in different circumstances. So,
we used these facts to verify the impact of the change
in the number of jitters, the color of the image and the
alignment of the faces in the recognition process.
We changed the parameters and analysed the Eu-
clidean distance in different iterations. In the first it-
eration, we used the original RGB images with no
face alignment. In the next iteration, we used gray-
scale images with no face alignment. In the final iter-
ation, we used gray-scale images with face alignment.
In addition, we also changed the number of jitters in
each iteration (only during the process of insertion).
Thus, we test whether a more general vector repre-
sentation of the face would significantly improve the
accuracy of the recognition or not.
As stated in the previous sections, we also tested
the accuracy of all 4 face detectors (Haar, HOG,
MTCNN and YOLO) using the images from the sec-
ond set. We manually labelled the images, count-
ing the number of faces in each one. Then, we ran
each face detector to compare their results and mea-
sure their detection, as well as their execution time.
Finally, we also used the second set to test the face
recognition algorithm based on the recognition rate.
For each image, we ran the YOLO detector (since it is
the best of all 4 detectors) to find the faces. Then, the
detected faces were used as input to the face recog-
nizer. Considering the face recognizer itself, we eval-
uated the recognition rate in different iterations, since
the face recognizer requires a threshold for identify-
ing faces. Therefore, we varied its value from 0.30 to
0.70, since values below 0.30 and above 0.70 did not
show an improvement in the recognition.
2
https://docs.opencv.org/
3
http://dlib.net/face detector.py.html
4
https://pypi.org/project/mtcnn/
5
https://pjreddie.com/darknet/yolo/
6
https://face-recognition.readthedocs.io/en/latest
ICEIS 2021 - 23rd International Conference on Enterprise Information Systems
606

6 EXPERIMENTAL RESULTS
In this section, we describe the experiments we per-
formed to evaluate our approach. Significance is ver-
ified with the ANOVA test with a confidence level of
95%. Table 1 show the averages of the Euclidean dis-
tances in each different circumstance. The ”Jitters”
column shows the number of times the images were
re-sampled in an attempt to create a more general-
ized representation of the faces. The columns ”RGB”,
”Gray-scale” and ”Gray-scale aligned” show the av-
erages of the Euclidean distances using color images
without face alignment, gray-scale images without
face alignment and gray-scale images with the face
alignment algorithm applied, respectively.
Table 1: Averages of the Euclidean distances.
Jitters RGB Gray-scale
Aligned
Gray-scale
1 0.5231 0.5008 0.5447
2 0.5108 0.4931 0.5411
3 0.5066 0.4887 0.5381
4 0.5055 0.4888 0.5374
5 0.5064 0.4882 0.5383
10 0.5049 0.4863 0.5386
From Table 1 we can observe that the smallest abso-
lute distance corresponds to gray-scale images with-
out face alignment and 10 jitters. The greatest abso-
lute distance corresponds to gray-scale images with
face alignment and 3 jitters. Thus, the null hypoth-
esis was rejected, considering the f-ratio value of
129.2294 and the p-value of 0.00001. Since the result
is significant at p < 0.05, it is possible to conclude
that there was, indeed, significant difference between
the groups. As a result, the best configuration that
minimizes the Euclidean distance, maximizing the ac-
curacy of the face recognition algorithm, is the use
of gray-scale images without alignment and 10 jit-
ters. Therefore, we answer the first research question
stated in Section 5, so tne number of jitters impact the
accuracy of the face recognition. Additionally, ex-
periments also answer the second research question
stated in Section 5, so converting the images to gray-
scale does increase the accuracy of the face recogni-
tion. Also, a higher number of jitters gives us a higher
accuracy, to a certain extent. On the other hand, the
alignment of the faces does not improve the accuracy
of the algorithm. In fact, in our case it hinders the
process. Moreover, the process of face alignment is
costly and hurts the speed of the overall process.
Regarding the accuracy of the detectors, 23 photos
were analyzed using each detector. We kept record of
the number of true positives (TP), true negatives (TN),
false positives (FP) and false negatives (FN). Those
values were then used to calculate the accuracy of the
algorithms, using the following formula:
Accuracy =
(T P + T N)
(T P + T N + FP + FN)
(1)
Table 2 shows the level of accuracy of each face de-
tection algorithm. We can observe that the Haar de-
tector has the lowest absolute accuracy among the 4
algorithms. However, if we consider the confidence
intervals of the Haar, HOG and MTCNN detectors,
there is no statistical difference between them.
Table 2: Face detection accuracy.
Algorithm Accuracy(%)
Haar 23.8213 ± 12.9518
HOG 34.3635 ± 14.5136
MTCNN 41.4500 ± 13.3559
YOLO 90.4978 ± 8.4235
However, it is clear that the YOLO detector is sig-
nificantly more accurate than the others. Its absolute
accuracy is greater than Haar, HOG and MTCNN by
66.67%, 56.13%, 49.04%, respectively. In addition,
considering the confidence intervals, YOLO beats the
Haar detector by at least 45.30%, the HOG detector
by at least 33.19% and the MTCNN detector by at
least 27.26%.
We also evaluated the speed of the algorithms.
The following values presented in Table 3 are the re-
sult of 10 iterations (the same 23 photos were ana-
lyzed in each iteration) with confidence level of 95%.
Table 3: Average detection time per photo.
Algorithm Time (seconds)
Haar 1.0056 ± 0.0245
HOG 2.6129 ± 0.0067
MTCNN 5.3393 ± 0.0618
YOLO 1.7322 ± 0.0101
From Table 3 we observe that there is a significant dif-
ference between the 4 algorithms in terms of speed,
with the Haar detector having a faster execution time,
with an average detection time of approximately one
second. Next, we have the YOLO detector with an
average detection time of 1.7322 seconds. Finally, we
have the 2 slowest detectors, HOG and MTCNN, with
an average detection time of approximately 2.61 sec-
onds and 5.33 seconds, respectively. In addition, if
we evaluae the total detection time for 23 photos, the
results are even more significant, as shown in Table 4.
From Table 4 we observe that the Haar detector has
a total average detection time of approximately 23.14
CHILDATTEND: A Neural Network based Approach to Assess Child Attendance in Social Project Activities
607
Table 4: Total detection time.
Algorithm Time (seconds)
Haar 23.1405 ± 0.5652
HOG 60.1057 ± 0.1547
MTCNN 122.8183 ± 1.4247
YOLO 39.8513 ± 0.2349
seconds, while the HOG and the MTCNN detectors
have a total average detection time of approximately
60.10 seconds and 122.81 seconds, respectively. We
can also observe that the YOLO detector is faster than
the HOG and the MTCNN detectors, with an average
detection time of approximately 39.85 seconds. And
although it is slower than the Haar detector, it presents
an outstanding balance between accuracy and speed
compared to the other detectors.
Considering the performance of the facial recog-
nition, we evaluated its accuracy using the same met-
ric as (Bah and Ming, 2019), based on the recognition
rate (RR):
RR =
TotalFaces − TotalFalseRecognitions
TotalFaces
. (2)
We used the YOLO detector to find the faces and
we varied the threshold values. A total of 248 faces
were found in all images in each iteration. Based on
the results presented in Table 5 we can conclude that
the best threshold value that maximizes the recogni-
tion rate is 0.50, which gives us a recognition rate of
93.14%.
Table 5: Recognition rate (RR).
Threshold False Recognition RR
0.30 36 0.8548
0.35 30 0.8790
0.40 22 0.9112
0.45 21 0.9153
0.50 17 0.9314
0.55 44 0.8225
0.60 94 0.6209
0.65 174 0.2983
0.70 215 0.1330
Note that our model is based on a one-shot face recog-
nition approach. Yet, this issue can be easily solved
if we have more than one image of each person for
training. Then, we can simply apply a classifier,
e.g., K-Nearest Neighbors (KNN), and identify the
person. Nevertheless, it is also possible to observe
that a high threshold (close to 1.00) causes a lower
recognition rate, which was already expected, since a
higher threshold means that the algorithm becomes
more flexible. Furthermore, YOLO detector has a
slight negative impact in the face recognition process,
since the faces in our dataset are angled, making it
difficult to align the faces that are correctly detected
(the true positives).
7 CONCLUSIONS
In this article we propose CHILDATTEND, a neural
network based approach to assess child attendance in
social projects, which exploits face detection, recog-
nition and alignment to find, identify and label chil-
dren’s faces in digital images. Experimental results
showed that our approach is fast and identifies chil-
dren in group photos with more than 90% accuracy.
Additionally, we thoroughly evaluated face detec-
tion algorithms, and experimental results showed that
the YOLO detector performs better than the other
ones, with an average detection rate of more than
90%. Moreover, in terms of detection speed, the Haar
algorithm performs better than the other detectors, al-
though providing a low detection rate. Thus, we com-
bined the two algorithms to produce a balanced (fast
and accurate) result. The best threshold value that
maximizes the performance of the recognition algo-
rithm was 0.50, providing a one-shot recognition rate
of 93.14%. We believe that using a classifier with
multiple photos of the same person will bring an even
better result.
In future work we plan to carry out a more exten-
sive assessment of image processing techniques and
strategies to improve the accuracy of the facial recog-
nition. We also plan to use other datasets with mul-
tiple instances of the same face in order to assess the
impact of different classifiers on the recognition rate.
ACKNOWLEDGEMENTS
The present work was carried out with the support
of the Coordenac¸
˜
ao de Aperfeic¸oamento de Pessoal
de N
´
ıvel Superior - Brazil (CAPES) - Financing
Code 001. The authors thank the partial support of
the CNPq (Brazilian National Council for Scientific
and Technological Development), FAPEMIG (Foun-
dation for Research and Scientific and Technological
Development of Minas Gerais), and PUC Minas.
REFERENCES
Bah, S. and Ming, F. (2019). An improved face recognition
algorithm and its application in attendance manage-
ment system. Array, 5:100014.
ICEIS 2021 - 23rd International Conference on Enterprise Information Systems
608

Chandrappa, D. N., Ravishankar, M., and RameshBabu,
D. R. (2011). Face detection in color images using
skin color model algorithm based on skin color infor-
mation. In Proceedings of the ICECT ’11, pages 254–
258.
Cortes, C. and Vapnik, V. (1995). Support-vector networks.
Machine Learning, 20(3):273–297.
Dalal, N. and Triggs, B. (2005). Histograms of oriented
gradients for human detection. In Proceedings of the
CVPR ’05, page 886–893.
Guillaumin, M., Verbeek, J., and Schmid, C. (2009). Is that
you? metric learning approaches for face identifica-
tion. In Proceedings of the ICCV ’05, pages 498–505.
Hazim, N. (2016). Improve face recognition rate using
different image pre-processing techniques. American
Journal of Engineering Research, 5:46–53.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In 2016 IEEE Con-
ference on Computer Vision and Pattern Recognition
(CVPR), CVPR ’16, pages 770–778.
Heisele, B., Poggio, T., and Pontil, M. (2001). Face de-
tection in still gray images. Technical Report 1687,
Massachusetts Institute of Technology.
Hjelm
˚
as, E. and Low, B. (2001). Face detection: A survey.
Computer Vision and Image Understanding, 83:236–
274.
Jafri, R. and Arabnia, H. (2009). A survey of face recog-
nition techniques. Journal Of Information Processing
Systems, 5:41–68.
Kanan, C. and Cottrell, G. (2012). Color-to-grayscale: Does
the method matter in image recognition? PloS one,
7:e29740.
Kawaguchi, Y., Shoji, T., Lin, W., Kakusho, K., and Mi-
noh, M. (2005). Face recognition-based lecture atten-
dance system. International Journal of Engineering
Research & Technology, 2(4).
Kumar, A., Kaur, A., and Kumar, M. (2019). Face detection
techniques: A review. Artificial Intelligence Review,
52.
Li, Z., Feng, W., Zhou, J., Dan, C., and Peiyan, Z. (2017).
Research on mobile commerce payment management
based on the face biometric authentication. Interna-
tional Journal of Mobile Communications, 15:278.
Liwei Wang, Yan Zhang, and Jufu Feng (2005). On the eu-
clidean distance of images. IEEE Transactions on Pat-
tern Analysis and Machine Intelligence, 27(8):1334–
1339.
Malikovich, K. M., Ugli, I. S. Z., and O’ktamovna, D. L.
(2017). Problems in face recognition systems and
their solving ways. In Proceedings of the ICISCT ’17,
pages 1–4.
Ming-Hsuan Yang, Kriegman, D. J., and Ahuja, N. (2002).
Detecting faces in images: a survey. IEEE Transac-
tions on Pattern Analysis and Machine Intelligence,
24(1):34–58.
Patel, K., Han, H., and Jain, A. K. (2016). Secure face
unlock: Spoof detection on smartphones. IEEE
Transactions on Information Forensics and Security,
11(10):2268–2283.
Peixoto, B., Michelassi, C., and Rocha, A. (2011). Face
liveness detection under bad illumination conditions.
In Proceedings of the ICIP ’11, pages 3557–3560.
Redmon, J., Divvala, S., Girshick, R., and Farhadi, A.
(2016). You only look once: Unified, real-time ob-
ject detection. In Proceedings of the CVPR ’16, pages
779–788.
Redmon, J. and Farhadi, A. (2018). Yolov3: An incremental
improvement. ArXiv, abs/1804.02767.
Rein-Lien Hsu, Abdel-Mottaleb, M., and Jain, A. K. (2002).
Face detection in color images. IEEE Transac-
tions on Pattern Analysis and Machine Intelligence,
24(5):696–706.
Sharif, M., Bhagavatula, S., Bauer, L., and Reiter, M. K.
(2016). Accessorize to a crime: Real and stealthy at-
tacks on state-of-the-art face recognition. In Proceed-
ings of the ACM CCS ’16, page 1528–1540.
Viola, P. and Jones, M. (2001). Rapid object detection using
a boosted cascade of simple features. In Proceedings
of the CVPR ’01.
Zhang, K., Zhang, Z., Li, Z., and Qiao, Y. (2016). Joint
face detection and alignment using multitask cascaded
convolutional networks. IEEE Signal Processing Let-
ters, 23(10):1499–1503.
Zhao, W., Chellappa, R., Phillips, P. J., and Rosenfeld, A.
(2003). Face recognition: A literature survey. ACM
Computing Surveys, 35:399–458.
Zhu, X. and Ramanan, D. (2012). Face detection, pose es-
timation, and landmark localization in the wild. In
Proceedings of the CVPR ’12, pages 2879–2886.
Zulfiqar, M., Syed, F., Khan, M. J., and Khurshid, K.
(2019). Deep face recognition for biometric authen-
tication. In Proceedings of the ICECCE ’19, pages
1–6.
CHILDATTEND: A Neural Network based Approach to Assess Child Attendance in Social Project Activities
609
