
Health Monitoring of Automotive Suspension System using Machine
Learning
Ahmed Abdelfattah
1
and Hesham Ibrahim
2
1
Mechatronics Department, German University in Cairo, Egypt
2
Associate Professor, Mechatronics Department, German University in Cairo, Egypt
Keywords:
Suspension Health Monitoring, Machine Learning, Quarter-Car Model.
Abstract:
This paper investigates Knowledge-based condition monitoring of automotive suspension dampers by imple-
menting a quarter car model (QCM). The sprung mass acceleration - frequency power spectral density curves,
for different cases of performance degradation in suspension damping and different operational conditions,
is provided in response to the random road disturbance of different road classes. Training and testing accel-
eration response data are generated by Mtalb/simulink and fed to different classification algorithms that are
trained and tested to distinguish between the different damping degradation values, in order to assess their
performance in terms of classification accuracy as well as their confusion matrix. In addition, the worthiness
of applying Principal Component Analysis (PCA), as a dimensional reduction technique, to increase all can-
didate classification algorithms is explored. Finally, the results of Quadratic Support Vector Machine showed
the best performance in terms of accuracy and confusion matrix, while using dimensional reduction turned to
be inefficient.
1 INTRODUCTION
It is inevitable for suspension system or any other
structure to gradually show signs of damage like re-
duction in performance due to many causes such as
inadequate maintenance, and material aging. Suspen-
sion system needs to be monitored frequently so that
if any damage detected, it could be fixed as soon as
possible in order to avoid unsafe or unreliable service
because of its partial or full failure. Recently, automo-
tive suspension health monitoring has been drawing
more interest as a potential application of the current
promising machine learning techniques (Jayasundara
et al., 2020).
Historically, providers of on-board monitoring
systems, installed on railway vehicles, were confined
to track defects and did not show any concern to the
suspension systems of the vehicle which could lead to
serious failures. On-board health monitoring systems
provide continuous monitoring with real-time detec-
tion of defects and early warning of any defect that
might happen on the future or even if there is a de-
fect now that will indeed help in saving money or
even in saving lives. Sensors, typically including ac-
celerometers, gyros, noise sensors (e.g. microphones)
and (GPS), used to be installed in a railway vehicle
to identify track irregularities, vehicle dynamic be-
haviour, vehicle precise location and velocity. Smart
algorithms like machine learning have been devel-
oped to analyse the data from sensor networks to offer
a precise real-time state estimation and for Fault De-
tection and Isolation (FDI) (Ngigi et al., 2012).
Health monitoring can be classified into three dif-
ferent categories; model based, signal based, and
knowledge based systems. In model based approach
,the system dynamic behaviour is modelled by mathe-
matical equations which relate the system response to
the input excitation. The main idea behind the model
based approach is to monitor the change in the system
dynamic behavior, using measured real-time system
response, which could be traced back to the degrada-
tion of system properties by the aid of the equations
of motion. (Peng et al., 2010).
Instead, signal based methods use only the mea-
sured output signals, which are further analyzed using
feature extraction methods. Signal-based feature ex-
traction methods are mainly classified into three dif-
ferent types which are time domain, frequency do-
main and time-frequency domain (Gao et al., 2015).
It does not matter which method is used, the idea is
that different faults in the system gives a totally dif-
ferent combination of values in the extracted features,
Abdelfattah, A. and Ibrahim, H.
Health Monitoring of Automotive Suspension System using Machine Learning.
DOI: 10.5220/0010402503250332
In Proceedings of the 7th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2021), pages 325-332
ISBN: 978-989-758-513-5
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
325

which enables the classifier to distinguish between
faulty and non-faulty condition,and also between dif-
ferent types of faults(Dai and Gao, 2013). In signal
based methods the relationship between the features
and the system current state, is extracted from the data
set without any human interference. It requires the
identification of signal patterns without having prede-
fined examples(Karlsson, 2019).
On the other hand, the core idea of Knowledge
based methods is to create a connection from fea-
ture to system condition autonomously, Which means
that the classifier will be trained by examining a huge
amount of examples and it learns the pattern neces-
sary for fault classification on its own. Therefore, this
method requires much more training data compared
to those required in signal based and model based
techniques.Knowledge based method also have dif-
ferent types based on the fault detection and diagnosis
(FDD) method utilized in them.
Hybrid technique is mainly a combination of two
of the above techniques or even all of them which is
the most common Fault Detection Technique (Cecati,
2015)(Gao et al., 2015) and hereinafter, some of the
previous research work of this topic will be cited. In
the process of developing a data-driven health moni-
toring system, two major tasks have to be solved for
improving prediction accuracy and computation ef-
ficiency: proper feature extraction from large-scale
sensory data and an accurate data analysis model. The
goal of a good health monitoring of a suspension sys-
tem is high prediction accuracy and low computation
time.
Luo et al.(Luo et al., 2018) proposed a novel
method is proposed to develop a health monitoring
system by integrating a multi- Gaussian fitting fea-
ture extraction method with a long short-term mem-
ory (LSTM) Convolutional Neural Network (CNN)
based damage identification method. Firstly, a multi-
Gaussian fitting method is devised to obtain compre-
hensive frequency-domain information of each sub-
sequence of the available vibration signals in order to
represent data of vibration signals and reduce the in-
put data size for data analysis purposes. Then this
data is feed to CNN model in order to obtain a non-
linear relation between the frequency domain features
and real time partial damage level.
In addition, Luo et al(Luo et al., 2019) intro-
duced another method of health monitor by using
Dual-Tree Complex Wavelet enhanced (DTCWT),
to obtain multi scale characteristics information of
measured signals. A deep convolutional neural net-
works (DCNN) model is then employed to automat-
ically extract useful damage features.The proposed
method proved efficient in eliminating noise from the
measured vibration signals.Finally a Contextual long
short-term memory (CLSTM) is built to capture the
nonlinear relationship between the preprocessed vi-
bration signals and corresponding partial damage val-
ues. Chen et al.(Chen et al., 2019) introduced an-
other approach to achieve the same goal by using Ex-
treme Learning Machine (ELM) along side with con-
volutional neural networks. Time series vibration sig-
nals were measured using accelerometers, while good
representative features were obtained using Wavelet
Transform (WT) to convert the one-dimensional time
signals into two-dimensional time-frequency images.
In CNN-ELM, the training samples are firstly fed into
the CNN architecture to obtain the feature maps, then
all the features are combined together and regarded as
the input of the ELM model which can be efficiently
trained by a generalized inverse operation. At the test-
ing phase, the testing samples are fed into the trained
CNN-ELM model to obtain the final diagnosis result.
Hong et al.(Hong et al., 2019) presented Multi-
Output Support vector regression (MSVR) method for
health monitoring of trains suspension system. The
main idea was to monitor the stiffness and damp-
ing coefficients the suspension system using vibration
signals measured on trains in real time. First, a simple
suspension system dynamics model is built to gener-
ate a training data set. Furthermore, key features are
extracted from frequency response curves to reflect
the impact of spring and damper degradation. Sub-
sequently, a supervised learning model based on the
(MSVR) is built to predict the stiffness and damping
coefficients of suspension systems from features ex-
tracted in the second module Once the model is built,
real time monitoring can be achieved.
KARLSSON (Karlsson, 2019) developed a
model, based on frequency response functions,to sim-
ulate the response of the four corner suspensions and
the goal was to detect which suspension is the faulty
one without quantifying the degradation value itself.
Hong et al. (Hong et al., 2019) provided different
approach based on the bode plot of the vertical ac-
celeration alongside with multi-output support vector
regression. The current paper presents an extension
to the above mentioned work, by introducing accel-
eration frequency response analysis along side with a
classification technique, in order to identify and quan-
tify the degradation percentage of the faulty suspen-
sion. A Knowledge-based condition monitoring, of
automotive suspension dampers, is developed by im-
plementing a quarter car model (QCM). The sprung
mass acceleration - frequency power spectral density
curves, for different cases of performance degrada-
tion in suspension damping and different operational
conditions, is provided in response to the random
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
326
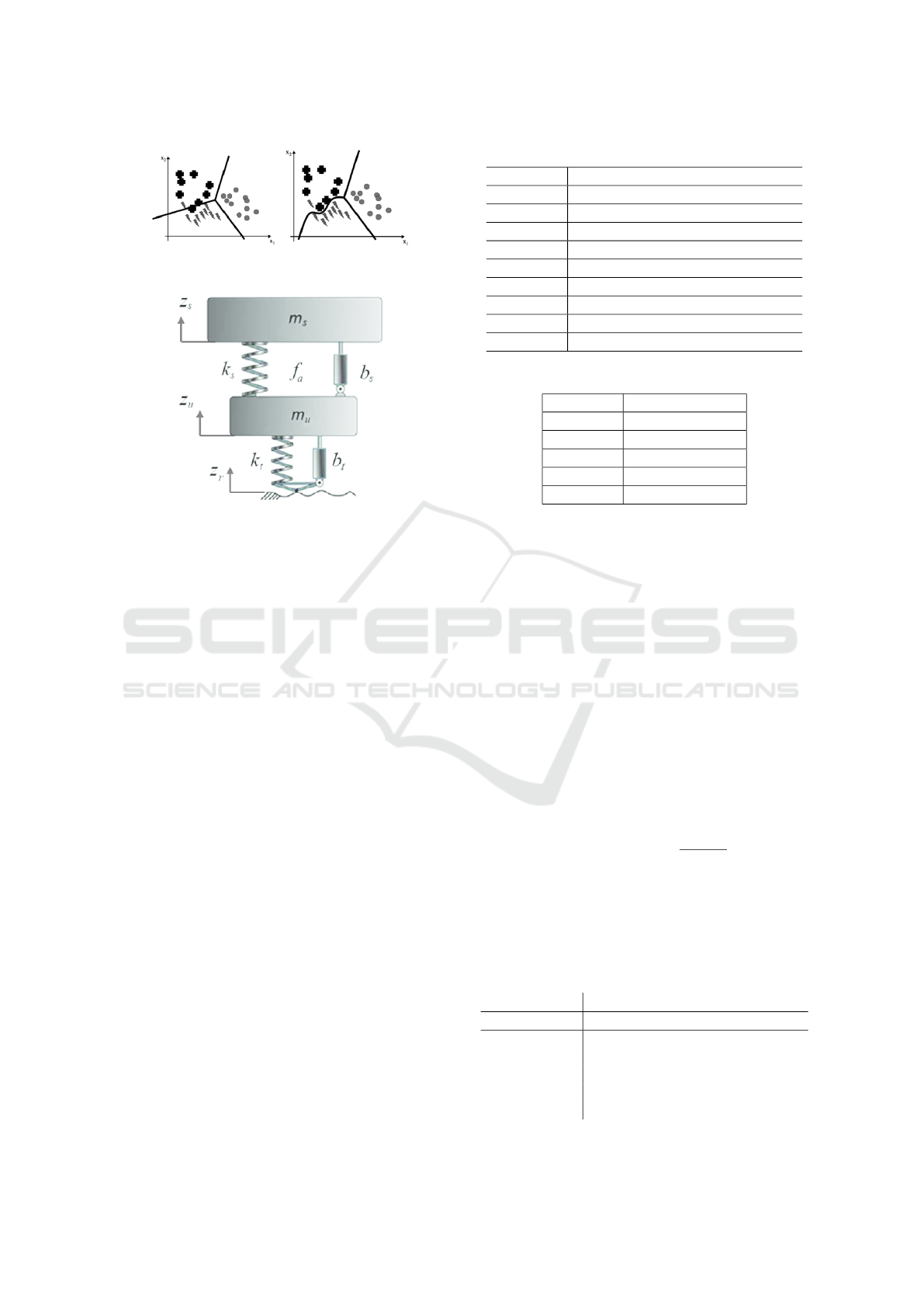
Figure 1: Machine Learning Classification Algorithm.
Figure 2: Quarter Car Model.
road disturbance of different road classes. Training
and testing acceleration response data are generated
by Mtalb/simulink and fed to different classification
algorithms that are trained and tested to distinguish
between the different damping degradation values.
Classification is utilized, rather than regression, be-
cause classification fits more discrete problem while
regression deals with continuous data.
2 MATHEMATICAL MODEL
This section details the mathematical approach, im-
plemented using quarter-car model (QCM), in order
to have a health monitoring of vehicles suspension
systems. A dynamical model is presented first which
will be simulated by Matlab/Simulink. Input and out-
put data to and from the simulink model will replace
the real time displacement and acceleration sensors
data which are supposed to be used in training and
testing the machine learning model.
2.1 Quarter Car Modeling
Dynamical model for a quarter-car model with two-
degrees of freedom, namely sprung mass and un-
sprung mass displacements, is implemented in order
to to simulate the car with different speeds, different
masses, different fault factors of the damper coeffi-
cient and different road profiles or tracks. Tables I
and II list the definition and numerical values of all
parameters involved in the following two equations
Table 1: List of parameters and their description of QCM.
Parameter Description
M
s
Sprung Mass(kg)
M
u
Unsprung Mass(kg)
K
s
Suspension Stiffness(N/m)
K
t
Tire Spring Stiffness(N/m)
b
s
Suspension Damper Coefficient(Ns/m)
b
t
Tire Damper Coefficient(Ns/m)
Z
s
Sprung Mass Displacement(m)
Z
u
Unsprung Mass Displacement(m)
Z
r
Road Profile(m)
Table 2: Suspension System Parameters values.
Parameter value
M
s
42.757 kg
M
u
5.6321 kg
K
s
10581.2922 N/m
b
s
96.0739 Ns/m
K
t
98041.2466 N/m
of motion.
M
s
¨z
s
= −k
s
(z
s
− z
u
) − b
s
( ˙z
s
− ˙z
u
) (1)
M
u
¨z
u
= k
s
(z
s
− z
u
) − k
u
(z
u
− z
r
) − b
s
( ˙z
s
− ˙z
u
) (2)
2.2 Road Profile
Road profiles differ from each other by the road
roughness which can be described by Power Spectral
Density (PSD) functions.The road roughness can be
seen as a stationary process in the space domain while
the car is moving. Therefore, the following differen-
tial equation 3, which models the road roughness and
velocity of the vehicle, could be very helpful in devel-
oping a training and testing data sets which represent
a wide range of road-vehicle dynamic interaction (He
et al., 2008; Zhang et al., 2007).
˙z
r
(t) + 2πn
o
vz
r
(t) =
q
S
q
(n
o
)vw(t) (3)
Equation 3 is a first order differential equation,
where v is the velocity in (m/s), z
r
is the road pro-
file (m), n
o
is reference spatial frequency of value 0.1
(cycles/m), S
q
(n
o
) is the coefficient of road roughness
Table 3: Coefficient of road roughness.
Road Class Roughness (10
−
6m
2
/(cycle/m))
lower geometric mean upper
A(very good) - 16 32
B(good) 32 64 128
C(average) 128 256 512
D(poor) 512 1024 2048
E(very poor) 2048 4096 -
Health Monitoring of Automotive Suspension System using Machine Learning
327

Table 4: Training Simulation variances for the QCM.
Feature Variance
velocity(kmph) 10 30 40 60 100 120
body mass factor 1 1.03 1.04 1.05
damping fault factor 1.0 0.75 0.5 0.25 0.1
road roughness class A B C D E
m
2
/(cycle/m) , w(t) is a white noise signal having a
PSD equal to 1. For simplicity S
q
(n
o
) is named N and
2πn
o
is named n.
According to ISO 8608(ISO/TC et al., 1995),
roads are classified according to their roughness into
5 categories A, B, C, D and E as shown in table 3.
A and B considered to be the highest quality repre-
senting motorways and expressways with more than
60 km/h velocity range, while class C is the average
road type with an average velocity between 30 and 60
km/h. Class D and E therefore are categorized to be
the worst with less than 30 km/h.
2.3 Machine Learning
Classification algorithms in machine learning are
trained and tested with different datasets. One im-
portant characteristic that an algorithm should pos-
sess is the ability to generalize, i.e. to be able to
perform well on testing datasets that differ from the
training dataset. For this reason different datasets
with different operational conditions should be incor-
porated in both the training and testing phase to evalu-
ate how well the algorithm can handle varying opera-
tional conditions that it will most certainly be exposed
to in a real-world application of vehicle’s suspension
system health monitoring.
It was decided to simulate the QCM on all five
different road profile classes by changing their road
roughness coefficient. These changes in the road pro-
files are accompanied by changes in car body masses
and speed and damping coefficient. Damping coeffi-
cients varies with 4 fault factors 0.75 0.5 0.25 0.1 as
well as the reference case (fault factor 1.0). Six differ-
ent speed profiles are also simulated 10 20 30 40 60
100 120 kmph as well as 4 different car body masses
with factors of 1 1.03 1.04 1.05 to represent changes
in the number of passengers as table 4.
2.4 Methodology
As explained when making a machine learning algo-
rithm data sets must be provided so that training and
testing is applicable. The common structure of this
data set and will be used in this work is through a de-
sign matrix.
Table 5: Design matrix.
ID Damping fault Feature 1 ... Feature n
1 1.0 xx ... xx
2 0.75 xx ... xx
3 0.5 xx ... xx
4 0.25 xx ... xx
.
.
. xx xx ... xx
600 xx xx ... xx
Figure 3: Road surface (class C, velocity 80 kmph).
Each row contains a data point, in table 5 is an ex-
ample of the used design matrix. Each row contains
an ID that identifies that specific data point, as shown
in the first column. The second column contains the
damping value that will be the target in the classifi-
cation algorithm. The rest of the columns contains
the features which will help the algorithm identify to
classify the target. There are total four features like
velocity of the vehicle, the peak of the PSD curve, the
sprung mass of the vehicle and finally the roughness
of the road the vehicle traveling on.
3 RESULTS AND DISCUSSION
The road profile for a vehicle traveling 80 kmph on a
road class C with a coefficient of road roughness 512
x 10
−6
m
2
/(cycle/m) is shown in fig3.
The reason of using PSD in health monitoring is
that it proved a relation between the peak of this PSD
and the damping coefficient. They are inversely pro-
portional so as the damping coefficient increases the
peak of the vertical acceleration PSD extracted from
the accelrometer decreases. This is proved by three
simulations their results shown in fig 4 where all of
the other parameters of the QCM is constant and the
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
328
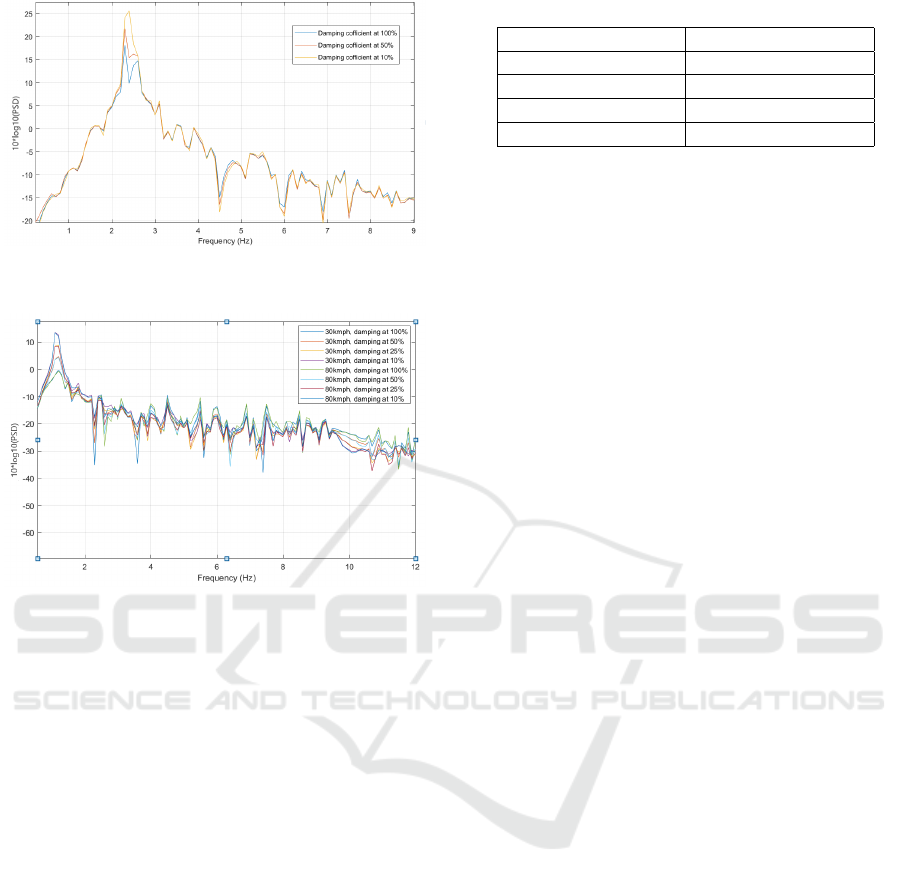
Figure 4: Power spectral densities for sprung mass acceler-
ation of different damping coefficients.
Figure 5: Power spectral densities for sprung mass acceler-
ation of different damping coefficients with different veloc-
ities.
only change is in the damping coefficient in order to
get reliable results to prove this relation.
In Figure 5 the track class (road profile) is kept
constant but the velocity is varied between 30 kmph
and 80 kmph. The variation of velocity with damping
coefficient shown in figure 5 shows how the velocity
affects the peak of the PSD.
The results will be in terms of the two per-
formance measures for different classification
algorithms are presented along with dimensional re-
duction of feature extraction (transformation) which
is called PCA. The first performance measure that
will be displayed in this section will be the accuracy
of the classification algorithm and also with 5-fold
cross validation. Validation is made to protect the
classification algorithms from overfittng. The second
performance measure will be the confusion matrix
of each classification algorithm also and it will be
explained later in this chapter.
There are total 24 classification algorithm trained
with and without PCA made on a dataset containing
6 different velocities, 4 different mass factors, 5
different damping fault factors and 5 different road
roughness classes as in table 4. This result of 600
simulation to create this training dataset and there
Table 6: Testing Simulation variances for QCM.
Feature Variance
velocity(kmph) 20 50 70 80 90 110
body mass factor 1 1.01 1.02 1.06
damping fault factor 1.0 0.75 0.5 0.25 0.1
road roughness class A B C D E
will be another 600 simulations to create another
datasets for more testing as in table 6. This section
will show results for the performance measures on
both the training dataset and according to this result,
the testing data sets will be tested on the algorithms
showed the best performance measures in the training
datasets.
3.1 Results of Training Datasets
The first performance measure is the correct clas-
sification rate (accuracy), defined as the number of
correct classifications divided by the total number of
classifications, which is the same as adding the true
positives and true negatives and dividing by the total
number of predictions:
Table 7 shows the output accuracy of each of 24
classification algorithm with PCA on and off with 5-
fold cross validation used and it showed a significant
drawback of using PCA with our dataset and classifi-
cation algorithms. Both cubic support vector machine
and quadratic support vector machine showed the best
results of the first performance measure without PCA.
Also table 8 shows the output accuracy of each of 24
classification algorithm with PCA on and off with 10-
fold cross validation and it resulted nearly the same
result when using 5-fold cross validation.
In many applications it is of the best to investigate
what the actual classifications are. This is often done
by using the confusion matrix. the rows show the true
class, and the columns show the predicted class as in
fig 6. When using holdout, then the confusion ma-
trix is calculated using the predictions on the held-
out observations. The diagonal cells show where the
true class and predicted class match. If these cells are
green, the classifier has performed well and classified
observations of this true class correctly.
The reason for choosing the confusion matrix as a
performance measure is that it shows the true positive
rates and false negative rates which are extremely im-
portant measure to specify the actual performance of
the classification algorithms. The lowest row shows
true class of no fault factor(100% damping coeffi-
cient) and the columns shows the predicted classes.In
fig 6 in the lowest row 99% of the simulations with
no fault factors were correctly classified(predicted)
Health Monitoring of Automotive Suspension System using Machine Learning
329
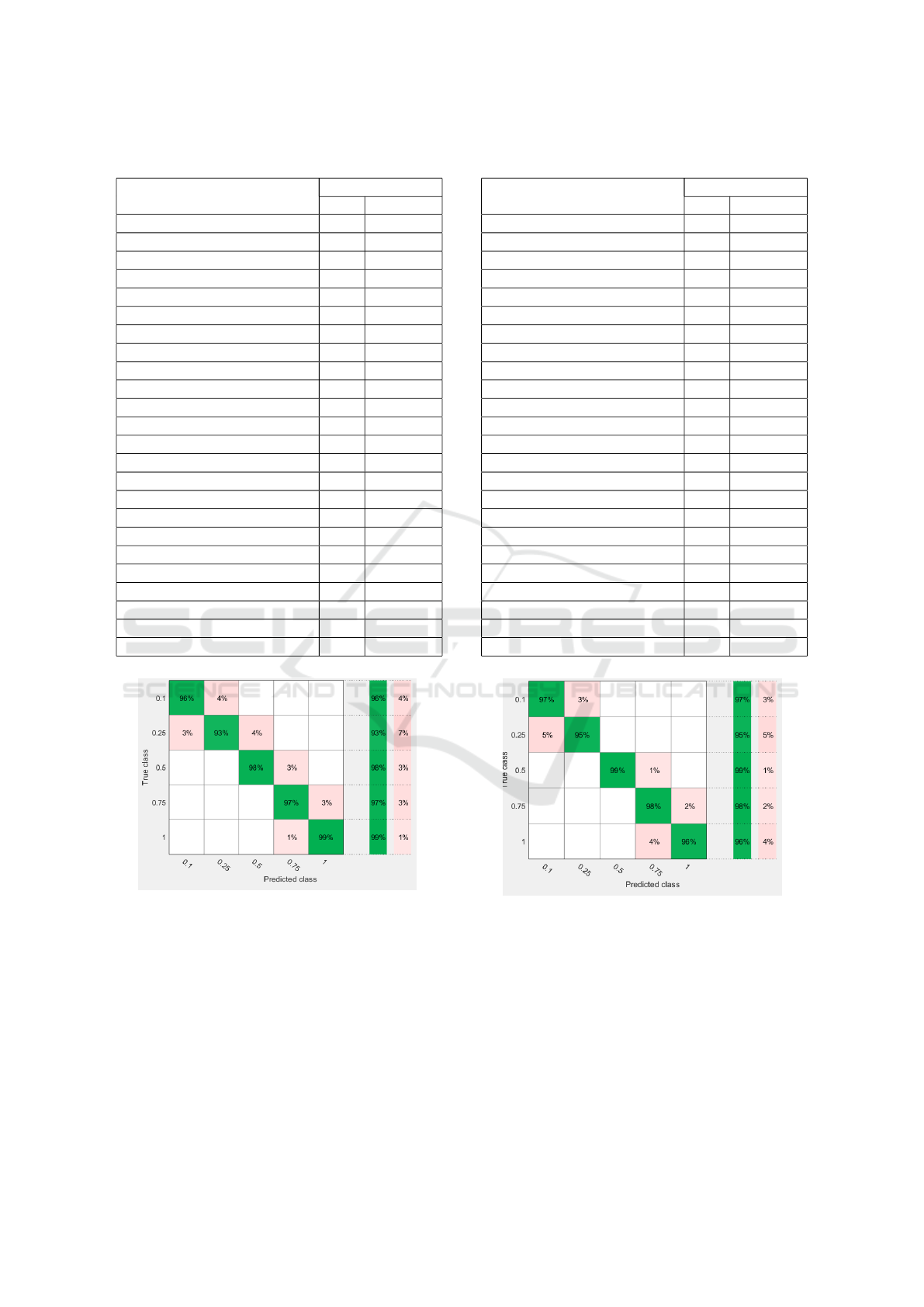
Table 7: Classification algorithms accuracy with 5-fold
cross validation.
Algorithm
Accuracy(%) PCA
OFF ON
Fine Tree 84.7 35.8
Medium Tree 74.5 29.8
Coarse Tree 48.7 21.8
Linear Discriminant 74.0 15.8
Quadratic Discriminant 75.3 14.3
Gaussian Naive Bayes 39.7 14.3
Kernel Naive Bayes 50.8 16.3
Linear SVM 75.0 19.7
Quadratic SVM 96.8 21.2
Cubic SVM 95.5 21.2
Fine Gaussian SVM 72.7 10.5
Medium Gaussian SVM 79.7 14.5
Coarse Gaussian SVM 67.5 15.0
Fine k-nearest neighbors 57.8 33.8
Medium k-nearest neighbors 57.2 47.3
Coarse k-nearest neighbors 44.5 17.0
cosine k-nearest neighbors 53.5 18.5
cubic k-nearest neighbors 57.5 47.3
Weighted k-nearest neighbors 59.0 35.3
Ensemble Boosted Trees 84.0 32.2
Ensemble Bagged Trees 76.5 34.3
Ensemble Subspace D 59.7 15.8
Ensemble Subspace K-N 24.8 33.8
Ensemble RUSBoosted Trees 74.5 28.5
Figure 6: Cubic support vector machine with 5-fold cross
validation confusion matrix.
to have 100% damping coefficient while only 1% of
the simulations were miss-classified as having 75%
damping coefficient, so 99% is the true positive rate
for correctly classified points in this class, shown in
the green cell in the True Positive Rate column (right
side). 1% is the false negative rate for incorrectly clas-
sified points in this class, shown in the red cell in the
False Negative Rate column(right side). Figures 7, 8
and 9 shows the confusion matrices of the best algo-
rithms in terms of accuracy.
Table 8: Classification algorithms accuracy with 10-fold
cross validation.
Algorithm
Accuracy(%) PCA
OFF ON
Fine Tree 86 38.8
Medium Tree 74.7 27.3
Coarse Tree 49.0 22.8
Linear Discriminant 73.5 15.5
Quadratic Discriminant 74.5 12.0
Gaussian Naive Bayes 39.5 12.0
Kernel Naive Bayes 50.3 15.5
Linear SVM 75.8 18.0
Quadratic SVM 96.3 19.8
Cubic SVM 96.3 22.2
Fine Gaussian SVM 75.7 7.7
Medium Gaussian SVM 83.3 11.7
Coarse Gaussian SVM 67.0 14.2
Fine k-nearest neighbors 58.5 35.3
Medium k-nearest neighbors 61.7 47.7
Coarse k-nearest neighbors 46.7 18.3
cosine k-nearest neighbors 56.2 19.7
cubic k-nearest neighbors 60.3 47.7
Weighted k-nearest neighbors 60.7 36.3
Ensemble Boosted Trees 83.2 29.7
Ensemble Bagged Trees 89.0 35.5
Ensemble Subspace D 59.3 15.5
Ensemble Subspace K-N 26.3 35.3
Ensemble RUSBoosted Trees 74.8 27.3
Figure 7: Quadratic support vector machine with 5-fold
cross validation confusion matrix.
3.2 Results of Testing Datasets of QCM
Figures 10 and 11 shows how our classification al-
gorithm (Support vector machine with quadratic ker-
nel function representing it) responded to the testing
datasets which contains 600 different simulations than
the training dataset. It showed extremely promising
results in the previous section in accuracy and con-
fusion matrix that’s why it was chosen to be further
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
330
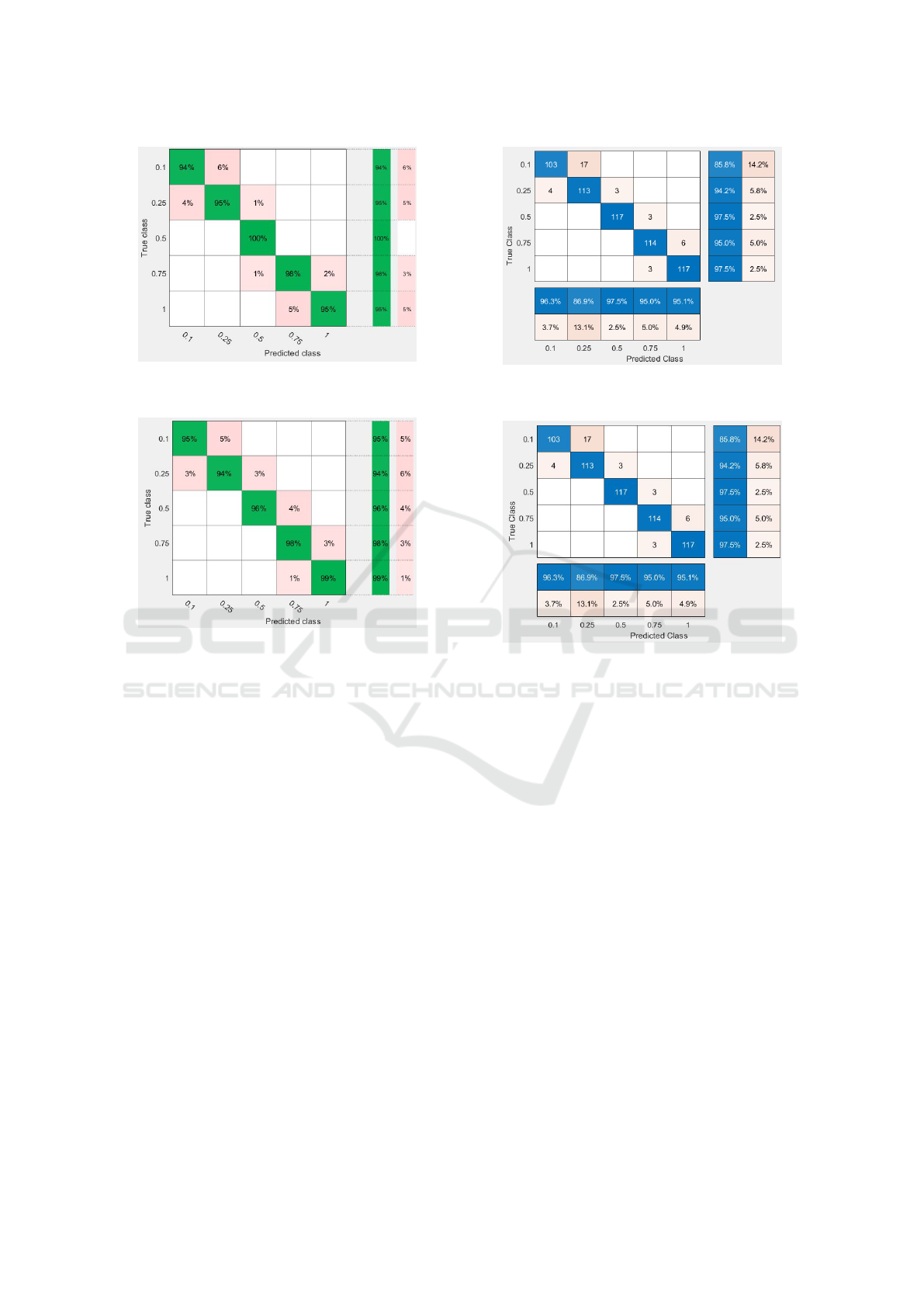
Figure 8: Quadratic support vector machine with 10-fold
cross validation confusion matrix.
Figure 9: Cubic support vector machine with 10-fold cross
validation confusion matrix.
tested and it showed 94% accuracy for the 5-fold val-
idation and 10-fold validation .
4 CONCLUSIONS
The objective of this paper is to propose a health mon-
itoring technique that can work on real time condi-
tions in the future in order to avoid or decrease the hu-
man casualties and the economic loss made because
of suspension systems failure. The vehicle safety and
reliability have become such important field as the
number of road vehicles has increased significantly
and still increasing. Health monitoring especially
fault detection is now a well known field and with the
help of Artificial Intelligence and various simulations
like for example car models in Matlab.
The general idea of the approach in this work is
to predict the value or the degradation happened in
the suspension system in the damping part (damping
coefficient) using several features like velocity of the
car, the road profile the car traveling on it and the mass
of the sprung mass (mass above the suspension part
excluding the tires) using these features and arrang-
Figure 10: Quadratic support vector machine with 5-fold
cross validation confusion matrix of testing dataset.
Figure 11: Quadratic support vector machine with 10-fold
cross validation confusion matrix of testing datasets.
ing them in the design matrix to introduce them to the
classification algorithms for further predictions. All
of this is based on the relation of the peak of the PSD
of the vertical acceleration of the sprung mass and the
damping coefficient. The results of Quadratic Support
vector Machine in QCM is very promising whether in
the training or testing data. Using PCA in both train-
ing and testing data resulted a significant decrease in
the performance of the models in terms of both accu-
racy and confusion matrix.
REFERENCES
Cecati, C. (2015). A survey of fault diagnosis and fault-
tolerant techniques—part ii: Fault diagnosis with
knowledge-based and hybrid/active approaches. IEEE
Transactions on Industrial Electronics.
Chen, Z., Gryllias, K., and Li, W. (2019). Mechanical fault
diagnosis using convolutional neural networks and ex-
treme learning machine. Mechanical Systems and Sig-
nal Processing, 133:106272.
Dai, X. and Gao, Z. (2013). From model, signal to knowl-
edge: A data-driven perspective of fault detection and
Health Monitoring of Automotive Suspension System using Machine Learning
331

diagnosis. IEEE Transactions on Industrial Informat-
ics, 9(4):2226–2238.
Gao, Z., Cecati, C., and Ding, S. X. (2015). A survey
of fault diagnosis and fault-tolerant techniques—part
i: Fault diagnosis with model-based and signal-based
approaches. IEEE Transactions on Industrial Elec-
tronics, 62(6):3757–3767.
He, L., Qin, G., Zhang, Y., and Chen, L. (2008). Non-
stationary random vibration analysis of vehicle with
fractional damping. In 2008 international conference
on intelligent computation technology and automation
(ICICTA), volume 2, pages 150–157. IEEE.
Hong, N., Li, L., Yao, W., Zhao, Y., Yi, C., Lin, J., and
Tsui, K. L. (2019). High-speed rail suspension sys-
tem health monitoring using multi-location vibration
data. IEEE Transactions on Intelligent Transportation
Systems.
ISO/TC, T. C., Vibration, M., Measurement, S. S. S., of Me-
chanical Vibration, E., and as Applied to Machines, S.
(1995). Mechanical Vibration–Road Surface Profiles–
Reporting of Measured Data. International Organiza-
tion for Standardization.
Jayasundara, N., Thambiratnam, D., Chan, T., and Nguyen,
A. (2020). Damage detection and quantification in
deck type arch bridges using vibration based meth-
ods and artificial neural networks. Engineering Fail-
ure Analysis, 109:104265.
Karlsson, H. (2019). Monitoring vehicle suspension ele-
ments using machine learning techniques.
Luo, H., Huang, M., and Zhou, Z. (2018). Integration
of multi-gaussian fitting and lstm neural networks for
health monitoring of an automotive suspension com-
ponent. Journal of Sound and Vibration, 428:87–103.
Luo, H., Huang, M., and Zhou, Z. (2019). A dual-tree com-
plex wavelet enhanced convolutional lstm neural net-
work for structural health monitoring of automotive
suspension. Measurement, 137:14–27.
Ngigi, R., Pislaru, C., Ball, A., and Gu, F. (2012). Modern
techniques for condition monitoring of railway vehi-
cle dynamics. In Journal of Physics: Conference Se-
ries, volume 364, page 012016. IOP Publishing.
Peng, Y., Dong, M., and Zuo, M. J. (2010). Current status of
machine prognostics in condition-based maintenance:
a review. The International Journal of Advanced Man-
ufacturing Technology, 50(1-4):297–313.
Zhang, Y., Chen, W., Chen, L., and Shangguan, W. (2007).
Non-stationary random vibration analysis of vehicle
with fractional damping. In 13th national conference
on mechanisms and machines.
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
332
