
Collective Perception: Impact on Fuel Consumption for Heavy Trucks
Juergen Hauenstein
1
, Jakob Gromer
1
, Jan Cedric Mertens
1
, Frank Diermeyer
1
and Sven Kraus
2
1
Institute of Automotive Technology, TU Munich, Boltzmannstr. 15, Garching, Germany
2
MAN Truck & Bus SE, Munich, Germany
Keywords: Vehicle-to-Everything, Collective Perception, Cooperative Driving, Heavy Truck.
Abstract: With on-board sensor technology, the environment can only be perceived to a limited extent. This can lead to
energy-inefficient driving maneuvers due to the late perception of objects. The fuel consumption of heavy
trucks is a major cost factor for transport companies, which is why energy-efficient systems are being sought.
With collective perception, perceived objects are exchanged via Vehicle-to-Everything (V2X) and merged to
a common environment model. Therefore, it is possible to achieve a greater awareness, which allows for
improved planning for automated vehicles. In this publication, a system with collective perception and energy-
efficient maneuver planning is presented. The functioning of the collective perception is presented using real
vehicle data. A vehicle simulation shows the positive effect of collective perception in combination with an
energy-efficient maneuver planner for determining the fuel consumption of heavy trucks.
1 INTRODUCTION
A number of publications deal with V2X (Lozano
Domínguez & Mateo Sanguino, 2019). In addition,
there are a large number of projects in the EU dealing
with cooperative driving (Botte et al., 2019). The
hope is that connected and automated vehicles will
make traffic safer in the future (Wang et al., 2020).
One problem with today's vehicles is the limited
visibility their own local sensor technology provides.
First, the range is very limited, e.g., a commercially
available LRR4 radar sensor from Robert Bosch
GmbH has a maximum range of 250 m (Robert Bosch
GmbH, 2014). Second, blind spots can also be caused
by vehicles owing to being in the shade, so that
objects cannot or very late perceived. Messages have
already been designed that use V2X communication,
which allows data to be transmitted directly between
vehicles. The first series-produced vehicles are
already using V2X to exchange warnings, for
example, (ADAC e. V., 2020; Rudschies, 2020).
However, currently, not all new vehicles can
communicate. In addition, automotive companies
advocate that in the future autonomous vehicles must
be able to drive safely even without V2X (Wood et
al., 2019). Therefore, in mixed traffic, vehicles with
and without V2X must be assumed in the future. In
addition to hazard alarms, collective perception is
another way to increase safety using V2X. Here the
captured objects are distributed to other vehicles via
an object list. The sent objects increase the perception
range, because it is now also possible to perceive
hidden objects. The simulation has already shown
that collective perception increases perception and
enhances safety (Günther, 2017).
So far, no experiments with real vehicles and
collective perception have been conducted.
Furthermore, the effect on fuel consumption is
unclear. Fuel consumption is particularly important
for heavy trucks in long-distance haulage, since fuel
costs account for between approximately 30% and
41% of a forwarding agency's total costs. (Esch &
Dahlhaus, 2016; Nowak et al., 2016). In addition,
savings in fuel consumption lead to reduced CO
2
emissions from internal combustion engines. In view
of the global warming caused by the greenhouse
effect and its negative consequences for people and
the environment (Bundesministerium für Umwelt,
Naturschutz und nukleare Sicherheit [BMU], 2019;
Bunz & Mücke, 2017; Masson-Delmotte, 2018), fuel
consumption has a social relevance in addition to its
economic significance.
350
Hauenstein, J., Gromer, J., Mertens, J., Diermeyer, F. and Kraus, S.
Collective Perception: Impact on Fuel Consumption for Heavy Trucks.
DOI: 10.5220/0010405500002932
In Proceedings of the 7th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2021), pages 350-361
ISBN: 978-989-758-513-5; ISSN: 2184-495X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

2 RELATED WORKS
2.1 Vehicle-to-Everything
Basically, there are two ways to realize V2X.
Messages can either be transmitted via a cellular
network or directly via an ad-hoc network. An
overview of both technologies is given by Weber et
al. (2019), Sjoberg et al. (2017), Festag (2015), Naik
et al. (2019), Ganesan et al. (2020) and Molina-
Masegosa and Gozalvez (2017). Cellular networking
such as 5G NR mode 1 distributes messages via
mobile radio while ad-hoc networks such as IEEE
802.11p usually use WLAN technology. Cellular
networks have the advantage of a theoretically
infinite range and messages can be prioritized, thus
the channel load can be regulated well. In return, ad-
hoc networks have the advantage of operating
independent of the mobile network coverage.
However, the research question regarding which
information is desirable for the realization of driving
functions is initially independent of the transmission
method.
In Europe, the Cooperative Awareness Message
(CAM) (European Telecommunications Standards
Institute, 2014a) and Decentralized Environmental
Notification Message (DENM) (European
Telecommunications Standards Institute, 2014b) are
currently specified. The CAM contains information
about the current vehicle status, such as position or
speed, and is distributed to all surrounding vehicles
via broadcast. The DENM is used for broadcasting
warnings, such as the presence of black ice. The
DENM is only sent when an event occurs and the
position is fixed. Unlike the CAM, the DENM is also
forwarded from one vehicle to another vehicle, using
a multi-hop algorithm to increase the range.
Similar to the standard defined in Europe, the
Basic Safety Message (BSM) exists in the USA
(Kenney, 2011). Here a distinction is made between
Part 1 and Part 2. Part 1 is similar to the CAM and
sends the current vehicle status, while Part 2 contains
information similar to the DENM. In contrast to the
European standard, there is no multi-hop algorithm.
The messages are only distributed by broadcast to
surrounding vehicles.
2.2 Collective Perception and
Cooperative Prediction
Cooperative driving can be divided into several
levels. A distinction can be made between explicit
and implicit communication, as well as according to
the utility. Explicit communication refers to the use
of V2X and is also referred explicit cooperation.
Collective perception is also called cooperative
perception and is the cooperative vehicle function
with the least utility. With cooperative prediction,
driving planes are distributed in the form of
trajectories, which eliminates the need for predicting
other vehicles and can improve planning by reducing
the uncertainty of a wrong prediction. The highest
levels of cooperative driving are negotiating a
common driving strategy and collaborative maneuver
planning (Burger et al., 2017). However, of all the
cooperative levels, collective perception is the only
method that is explicitly designed for mixed traffic
involving V2X and non-V2X road users.
In the Technical Report 103 562 of the European
Telecommunications Standards Institute (2019), it
has been shown that collective perception can
increase awareness. In addition, it has been shown in
various scenarios that collective perception increases
the time-to-collision compared to a local environment
model (Eiermann et al., 2020; Günther, 2017). Allig
and Wanielik (2019), Delooz and Festag (2019 -
2019) and Thandavarayan et al. (2019) presented
possibilities for reducing the channel load, so that
information can be exchanged reliably even during
high traffic density. Currently, the Collective
Perception Service and thus the Collective Perception
Message (CPM) are defined as a standard (European
Telecommunications Standards Institute, 2020a). The
CPM contains all necessary information for creating
a common environment model. If objects are
measured in vehicle coordinates relative to the own
position, then in addition to the object list, a reference
object with the absolute position is also necessary.
In addition to CPM, the Maneuver Coordination
Service and the corresponding Maneuver
Coordination Message (MCM) are currently being
defined as a standard (European Telecommunications
Standards Institute, 2020b). With this message,
cooperative maneuvers can be coordinated via
trajectory exchange, for example, by implementing
the concept of planned and desired trajectories
(Lehmann et al., 2018). However, only by sending the
own plan in the form of a trajectory without of any
other information, it is also possible to represent a
cooperative prediction.
3 SYSTEM OVERVIEW
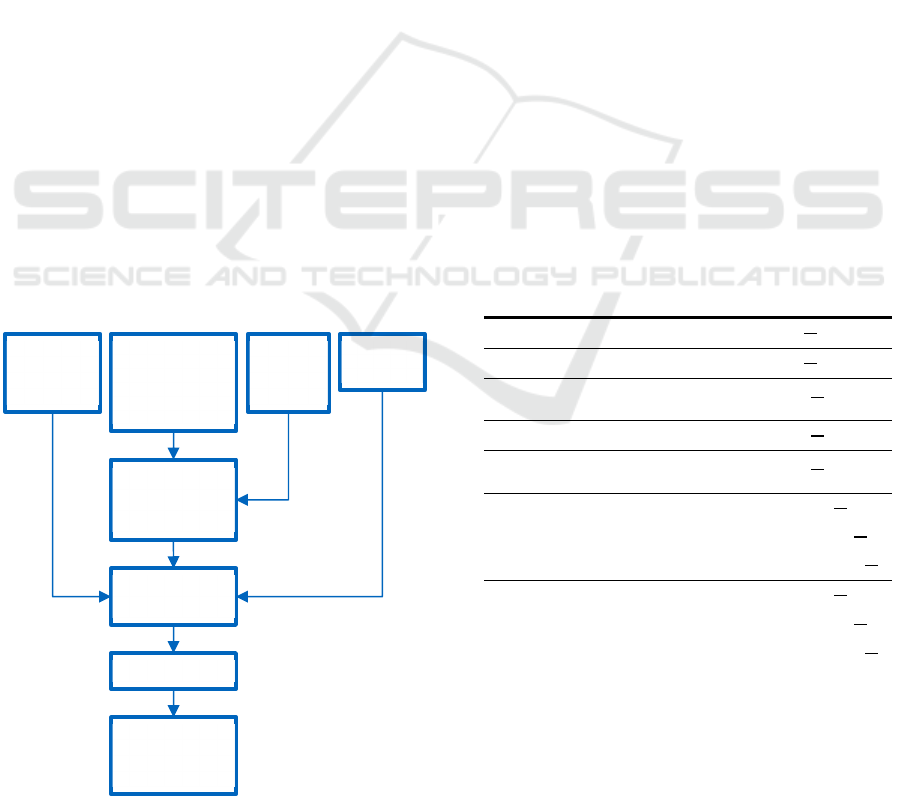
Figure 1 shows an overview of the overall system.
The local and global perception module, the road
model and road API, the visualization and the COM
Collective Perception: Impact on Fuel Consumption for Heavy Trucks
351

module are implementations of the IMAGinE project.
The IMAGinE project aims at developing cooperative
driving functions (European Center for Information
and Communication Technologies (EICT) GmbH,
2017). The road model defined in IMAGinE
describes the roads in frenet coordinates. Road
information can be accessed through an API by all
modules. Also, a library for handling collision checks
is available. The visualization represents objects and
roads, and is only used for visual monitoring. The
COM module is the software interface to the
communication unit. The desired driving action,
which includes coasting advise and a calculated
trajectory is published by the planning module. The
controller translates the output into control signals,
such as desired acceleration 𝑎
or steering wheel
angle 𝛿
and passes on to the actuators. In the
following, the perception modules and the planner for
the energy-efficient trajectory calculation are
described in more detail.
Figure 1: System overview.
3.1 Cooperative Perception
The vehicle detects objects with its sensor system.
The list of perceived objects is passed on to the local
object fusion. The local perception module assigns
each object to an existing track or creates a new track.
A new track is created if the object state differs too
much from a tracks state. In addition, the objects are
predicted, which is necessary to keep objects that are
not recognized for a short time in the environment
model. The local fusion object list is sent to other
surrounding road users via CPM. Since the object
states are expressed in relative coordinates to the
sender vehicle, the ego-vehicle is also sent as a
reference object, which contains the absolute
position. In addition, all necessary data for the CAM
is determined from the acquired ego-vehicle.
Figure 2: Cooperative trucks form IMAGinE project.
Figure 3: Two cooperative trucks following one non-
cooperative vehicle. Perception from following truck on the
same time and different data types are displayed.
COM‐
Module
LocalSensors
Planner
Local
Perception
Module
Global
Perception
Module
Controller
Actuators
CAM,CPM(Objects)
𝑎
,𝛿
,gear
𝑥
𝑡
,𝑦
𝑡
,drivingaction
CAM(Ego)
𝑥, 𝑦, 𝑣, …
(Ego‐Data)
MCM(Ego)
MCM(Objects)
GlobalObjectList
ObjectList
Road
Model/API
Visualization
ModulesfromIMAGinEProject
CustomModulesandSerialProduct
CPM(Ego)/
LocalObjectList
Ego‐Vehicle
SensorObject
LocalFusionObject
CAMObject
CPMObject
GlobalFusionObject
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
352
The global perception module uses the ego-data
and the objects from the ego-sensors to provide
objects with absolute positions as input. In addition,
the received objects via CAM and CPM are used as
further input variables. The objects are assigned to
existing tracks or new tracks are created and
additionally predicted into the future in the same way
as in the local fusion. The output is a global object list
which is used by the planner.
Within the IMAGinE project, two cooperative test
vehicles were set up at MAN Truck & Bus SE, which
are shown in Figure 2. Figure 3 shows how collective
perception works in an actual vehicle. Two
cooperative trucks follow a non-cooperative vehicle,
which is detected by the second truck with the local
sensor system. The locally fused object is sent via
V2X to the rear truck. In contrast to the local
environment model, the rear truck perceives two
instead of only one object with the collective
perception.
3.2 Maneuver Planning
Figure 4 gives an overview of the planner. The
planner gets the global object list from the global
perception module as input. For cooperative vehicles,
additional trajectories are received over V2X by the
COM module as MCM, thus the behavior of these
vehicles is known. Non-cooperative vehicles do not
send any information via V2X, therefore, their
driving behavior is predicted in the first step. It is
assumed that they continue to move at constant speed.
Figure 4: Maneuver Planning.
In the second step, possible trajectories for the
ego-vehicle are calculated. The present investigation
does not require complex trajectory calculation, but it
is important that alternative trajectories are
calculated, which also include energy-efficient
trajectories in the form of coasting maneuvers. A
previously defined path defines the strategic decision
of the target and the route. Starting from the current
position, the upcoming path section is linked to a
velocity profile. By defining the velocity to the
position and describing the initial state, a fully
described movement in space over time is given,
which corresponds to the definition of a trajectory
(Biagiotti & Melchiorri, 2009). The velocity profiles
represent either constant accelerations (Equation 1) or
coasting maneuvers with open clutch (Equation 2).
𝑣
𝑡
𝑎∗𝑡𝑣
(1
)
𝑣
𝑡
𝑞
𝑞
∗𝑡𝑞
∗𝑡
𝑞
∗𝑡
(2
)
Here 𝑎 is a constant acceleration. 𝑣 represents
velocity and 𝑡 time. The constants 𝑞
, 𝑞
, 𝑞
and 𝑞
are determined from a coasting test where 𝑞
is
identical to the corresponding initial velocity 𝑣
of
the test 80 km/h. The coefficients 𝑞
, 𝑞
and 𝑞
are
dependent on mass. Table 1 shows the driving
maneuvers considered in this paper.
Table 1: Overview of velocity equations and the
corresponding parameter for the considered maneuvers.
Equation 1 describes linear motion, equation 2 describes
non-linear motion (3rd degree polynomial).
Maneuver E
q
. Parameters
Cruising 1
𝑎0
Acceleration
1
𝑎1
Slight
Deceleration
1
𝑎1
Deceleration
1
𝑎2
Strong
Deceleration
1
𝑎3
Coasting
(mass 7 t)
2
𝑞
0.2355
,
𝑞
9.3027∗10
,
𝑞
2.0612 ∗ 10
Coasting
(mass 40 t)
2
𝑞
0.1446
,
𝑞
2.5459∗10
,
𝑞
3.1443 ∗ 10
During the acceleration maneuver, speed is
limited by the maximum allowed speed on the track
section. When maximum speed is reached, the
maneuver continues with constant velocity. Likewise,
during deceleration, the maneuver is limited
COM‐
Module
(MCM)
Local
Sensors
(Ego‐Data)
Trajectory
Calculation
Predictionnon‐
cooperative
vehicles
Global
Perception
Module
(ObjectList)
CostCalculation
Output
(Trajectory,
DrivingAction)
Strategic
Path
Collective Perception: Impact on Fuel Consumption for Heavy Trucks
353

downward by 0 m/s and the velocity is maintained
afterward.
In the following, a collision check is performed.
In our work, a collision is understood as a violation of
the safety distance. According to the German §4
StVO (Straßenverkehrs-Ordnung (StVO), 2017) law,
proper distance must always be maintained so that if
the front vehicle suddenly brakes, the vehicle
following will be able to either decelerate or stop
safely. In addition, the law prescribes further distance
requirements, e.g. that a minimum distance of 50 m
must be maintained for trucks travelling at speeds
above 50 km/h on German freeways, which is not
relevant in the present work, since the initial distances
are sufficiently large. The safety distance can be
defined by the headway. The headway indicates how
much time elapses until two following vehicles reach
the same point on the road. The recommendations of
the countries are not uniform and can be as high as 3
seconds, but for times greater than 2 seconds, a safe
distance can be assumed (Mahmud et al., 2017).
Headway is not calculable during standstill, which is
why a minimum distance 𝑑
with 10 m is defined.
In this paper, the collision is defined as follows:
𝑑max 𝑣∗𝑡
,𝑑
(3)
with
𝑑𝑥
𝑥𝑙
(4)
𝑥
and 𝑙
state the position and length
of the front vehicle. 𝑥 is the position along a lane of
the relevant following vehicle and 𝑑 is the
corresponding distance to the front vehicle. The ITS-
G5 reference point for the position is used, it is
indicated as the front center bumper projected on the
ground (European Telecommunications Standards
Institute, 2014a). 𝑣 is the current speed and 𝑡
is the desired time interval. Derived from the
headway, 2 secs are selected for 𝑡
.
Table 2: Maneuver costs.
Maneuver Maneuver Costs (Priority)
Cruisin
g
1
Acceleration 0
Slight Deceleration 3
Deceleration 4
Strong Deceleration 5
Coastin
g
2
Next, the collision free trajectories are charged
with costs. The costs are determined based on the
maneuver, which represents a prioritization of the
maneuvers. Table 2 shows the allocation between
maneuver and costs. The collision-free trajectory with
the lowest costs is set as the output trajectory. This is
passed on to the controller and sent as an MCM to
other road users.
4 SIMULATIVE EVALUATION
4.1 Simulation Environment
The code for the function logic is written in C++ and
integrated in the Framework Robot Operating System
(ROS). Ubuntu 16.04 was used as the operating
system and the corresponding ROS version ROS
Kinetic. By using the ROS Framework, it is possible
to use the same implementation in the simulation as
in the real vehicle. The real-time vehicle simulation
TruckMaker 7.1 has been extended within the
IMAGinE project of IPG. On the one hand, an
interface to ROS was created and on the other hand,
the extension SimNet allows the detailed simulation
of several ego-vehicles (An & Specka, 2019). V2X
communication is simulated by exchanging ROS
topics, which corresponds to communication without
packet loss. A typical tractor-trailer combination used
in long-distance traffic in Europe was selected to act
as the truck. Based on a demo vehicle with a 353 kW
engine available in TruckMaker, a 12-speed
transmission according to Fries (2019) and Wolff
(2016) was added, which is typically used in long-
distance traffic. For the investigations, two trucks
with two different sensor setups are available (Figure
5). The ranges and beam angles for the long-distance
range are based on the radar sensors described by
Baek et al. (2020). The radar sensor for the short
range is specified according to A.D.C. GmbH (2017).
The simulation is based on a perfect sensor model
in which all state variables are known for perceived
objects, e.g. the length of the vehicle, which real radar
sensors cannot measure.
Figure 5: Sensor setups in the semi in top view. Top: only
front sensor. Bottom: round view.
Angle:120°
Range:50m
Angle:20°
Range:200m
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
354
4.2 Scenarios
The optimal driving strategy can be driven without
traffic. Only when other road users claim driving
space for themselves do they need to adjust their
driving strategy. Through cooperation, these
scenarios can be solved better than without
cooperation. Ulbrich et al. (2015) has classified and
presented various cooperative scenarios. Most of the
scenarios are associated with lane changes or
intersections. In (Rudschies, 2020) the cooperative
scenario, stops are also mentioned. When
investigating the impact on fuel consumption, only
those scenarios are relevant where it can be expected
that using a global environment model will show less
fuel consumption. Improvements regarding fuel
consumption are mainly expected by avoiding
braking followed by an acceleration to the desired
velocity or by performing coasting maneuvers instead
of cruising with an injecting internal consumption
engine. Often these scenarios are equivalent to the
improvement owing to early detection of obstacles or
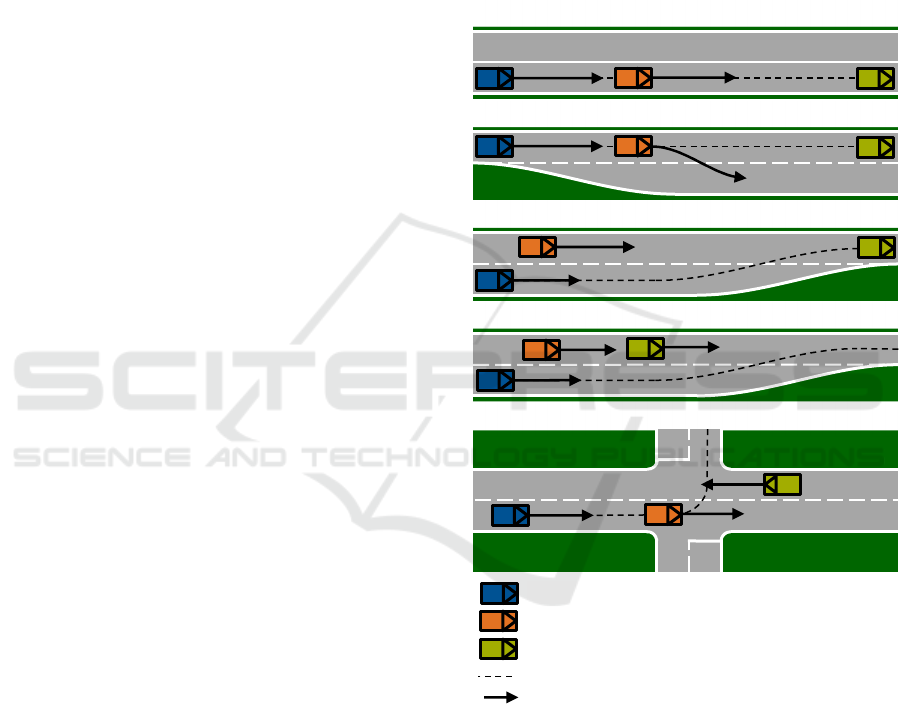
conflict situations. Based on this, five scenarios were
derived, which are shown in Figure 6. In all scenarios,
cooperative vehicles forward their detected objects
via the CPM and communicate their driving behavior
to other vehicles via the MCM.
In the first scenario, stopping before a traffic jam,
there is a stationary vehicle on the road. Two
cooperative trucks drive toward the vehicle. The first
cooperative vehicle perceives the stationary vehicle
based solely on its own sensors, whereas the second
cooperative can use the information from both CPM
and MCM.
Scenario two, stopping before a traffic jam and
departing, is similar to scenario one. However, in
contrast to scenario one, the first cooperative vehicle
drives past the stationary vehicle and takes a different
route than the last vehicle. In contrast to scenario one,
where the last vehicle could also only react to the first
cooperative vehicle, here the non-communicating
stationary vehicle is most relevant.
In the third scenario, merging before a traffic jam,
a cooperative truck wants to merge into a lane. At the
end of the lane he is merging into, there is a stationary
vehicle. Another cooperative truck is driving in the
same lane as the stationary vehicle and can detect it
earlier than the vehicle that is planning to merge.
The fourth scenario, merging with conflict, is
similar to the third scenario. A cooperative truck
follows a non-cooperative vehicle in a lane. A further
cooperative truck wants to change to the lane of the
non-cooperative vehicle. The lane change is
conflictual, i.e., the merging vehicle is not allowed to
change lanes. Owing to the collective environment,
this conflict is able to be detected earlier.
In the last scenario, turning left with oncoming
traffic, a cooperative truck wants to turn left at an
intersection while the cooperative truck in front
continues straight ahead. The cooperative truck is
approached by an opposing non-cooperative vehicle,
so that this vehicle must first be let through. The
environment model allows earlier detection of the fact
that an immediate turn is not possible.
Figure 6: Schematic representation of investigated
scenarios.
Table 3 shows the examined variations. The
distance, the total mass and the sensor configuration
are varied. The start distance between the two
cooperative vehicles is based on the ranges for
communication. Actual tests have shown a maximum
range of 700 m when using IEEE 802.11p (Almeida
et al., 2018). Mertens et al. (2020) describes 400 m as
the feasible range for trucks using IEEE 802.11p in
direct vision. If the range is less than 200 m, then
Scenario1:Stoppingbeforetrafficjam
Scenario2:Stoppingbeforetrafficjamanddeparting
Scenario3:Mergingbeforetrafficjam
Scenario4:Mergingwithconflict
Scenario5:Turningleftwithoncomingtraffic
Cooperativetruck(ego‐vehicle)
Non‐cooperativevehicle(trafficobjectwithoutV2X)
Cooperativetruck(traffic‐vehiclewithV2X)
Currentvelocity
Path/Routeego‐vehicle
Collective Perception: Impact on Fuel Consumption for Heavy Trucks
355

detection using commercially available radar sensors
is already possible, which is why this is chosen as the
minimum distance for the variations. The total mass
is varied by the use of a semi-trailer, resulting in total
masses of 7 or 40 t. 40 t, which corresponds to the
German §34 StVZO law regulating the maximum
permissible total mass (Straßenverkehrs-Zulassungs-
Ordnung (StVZO), 2017).
For the investigations, the planner is operated with
the local object list from the local perception module
instead of the global object list as the reference
scenario for each variant. This enables a comparison
between global and local environment models.
Table 3: Variations for scenarios.
Scenario Trailer
Vehicle
Distance
Sensor Setup
1
No,
Yes
200 m, 400 m,
700
m
Front
2
No,
Yes
200 m, 400 m,
700
m
Front
3
No,
Yes
-
Front
4
No,
Yes
- Front, Round
View
5
No,
Yes
200 m, 400 m,
700
m
Front
4.3 Results
In section 1, fuel costs are mentioned as the largest
part of the total cost of ownership for freight
forwarders. In addition, the reduction of fuel
consumption is beneficial for the environment. Based
on this, absolute fuel consumption is the most
important evaluation parameter. Only the ego-
vehicle, which benefits from the transmission of the
CPM, is considered in the following. In the scenarios
presented, the other cooperative vehicle only serves
to transmit the sensor data. This vehicle cannot
benefit from the V2X data and drives the same
trajectory both in the scenarios with and without
cooperation, which is why the fuel consumption is
identical in each case and therefore does not need to
be considered.
Figure 7 shows the velocity profiles of the first
scenario with collective perception as a function of
distance, and the velocity profile when using the local
environment model is also shown. It is recognizable
that the farther the distance or the communication
range is, the earlier a coasting maneuver can be
initiated and the longer the coasting maneuver is.
Figure 8 shows the fuel consumption. The longer the
coasting maneuver is, the greater the benefit of the
environment model. Also visible, the larger the mass
is, the greater the reduction in fuel consumption.
In scenario two, the velocity profiles (Figure 9)
show a different behavior, although the reason for the
necessary deceleration, a stationary vehicle, is the
same. The front cooperative vehicle leaves the lane
and therefore only the stationary vehicle is relevant
for the collision check. The cooperative vehicle sends
a CPM as long as the stationary vehicle is detected by
its own sensors. After the lane change, the object is
no longer within the range of vision of the sensors and
is therefore no longer detected. Objects are further
predicted over a horizon of 2 seconds after the last
CPM has been received. If the distance between
objects is great, a roll maneuver is initiated and
continued until the object is removed from the global
environment model owing to a lack of new
information. The vehicle then accelerates to the
desired speed again and brakes only when the vehicle
is perceived by its own sensors. Consequently, fuel
consumption at the distances 400 and 700 m is much
higher than at 200 m where acceleration to the desired
speed is not necessary (Figure 10).
In the scenario merging in front of the beginning
of a traffic jam, the velocity profiles (Figure 11) show
that with collective perception, a coasting maneuver
is performed before the necessary braking is
performed. Reducing fuel consumption also depends
on the total mass (Figure 12).
The velocity profiles in scenario four, merging
with conflict, show that a conflict cannot be avoided
with a local environment model and only front
sensors, since the speed is not adjusted here (Figure
13). With extended local environment sensors, the
vehicle brakes to 5 m/s, whereas with collective
perception less speed reduction is necessary. Again,
Figure 14 shows a significant improvement in fuel
consumption when using collective perception.
In the last scenario, turning left with oncoming
traffic, the velocity profiles (Figure 15) show similar
behavior with and without collective perception. In
all variants, braking must be applied up to the
maximum permissible curve speed. Braking cannot
be avoided with collective perception. Avoiding
braking to a standstill has little effect on fuel
consumption. Likewise, higher communication
ranges or greater distances have no effect on fuel
consumption (Figure 16). Differences in fuel
consumption are mainly due to the non-deterministic
behavior of ROS.
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
356

Figure 7: Velocity profiles of the first scenario, stopping
behind traffic jam.
Figure 8: Fuel consumption of the first scenario, stopping
behind traffic jam.
Figure 9: Velocity profiles of the second scenario, stopping
before traffic jam and departing.
Figure 10: Fuel consumption of the second scenario,
stopping before traffic jam and departing.
Figure 11: Velocity profiles of the third scenario, merging
before traffic jam.
Figure 12: Fuel consumption of the third scenario, merging
before traffic jam.
Collective Perception: Impact on Fuel Consumption for Heavy Trucks
357
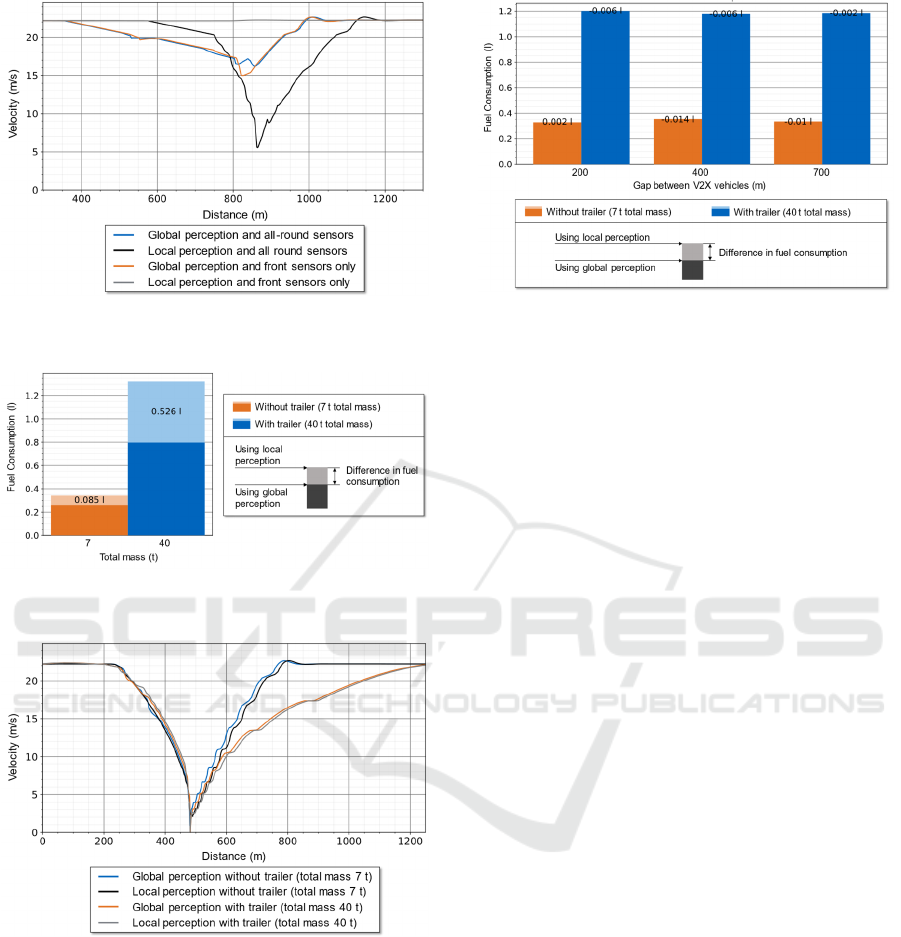
Figure 13: Velocity profiles of the fourth scenario, merging
with conflict.
Figure 14: Fuel consumption of the fourth scenario,
merging with conflict. Sensor setup round view.
Figure 15: Velocity profiles of the fifth scenario, turning
left with oncoming traffic.
Figure 16: Fuel consumption of the fifth scenario, turning
left with oncoming traffic.
5 DISCUSSION
The benefit of the global environment model in
individual situations was shown in the previous
section. However, the benefit for forwarding agents
depends on the frequency of the situations. Therefore,
a detailed analysis for the occurrence of situations in
the daily routine of long-distance haulage is
necessary. Problematic here is the complex data
acquisition of sensor values, which is however
necessary, so that these can be used for the global
environment model and thus the analysis in the
follow-up. In addition, storing large amounts of data
is a challenge.
Various parameters can be set for the environment
model, e.g. the lifetime of the objects if no sensor
detects them anymore. If objects are discarded at an
early stage, it is possible that a vehicle can stop
driving in a fuel-efficient manner as in scenario 2.
Predicting objects for a very long time can lead to
unrealistic driving behavior. In (Schubert et al.,
2008), for example, the assumption that vehicles
continue to move with constant acceleration is
considered a valid approach, but in practice it may be
that the object can leave the road or the driving lane
if the prediction is long, especially when cornering
(Figure 17). More complex models may be able to
predict objects better, e.g. by map matching onto the
road. However, under certain circumstances a large
number of objects must be predicted, which can lead
to computational time problems.
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
358
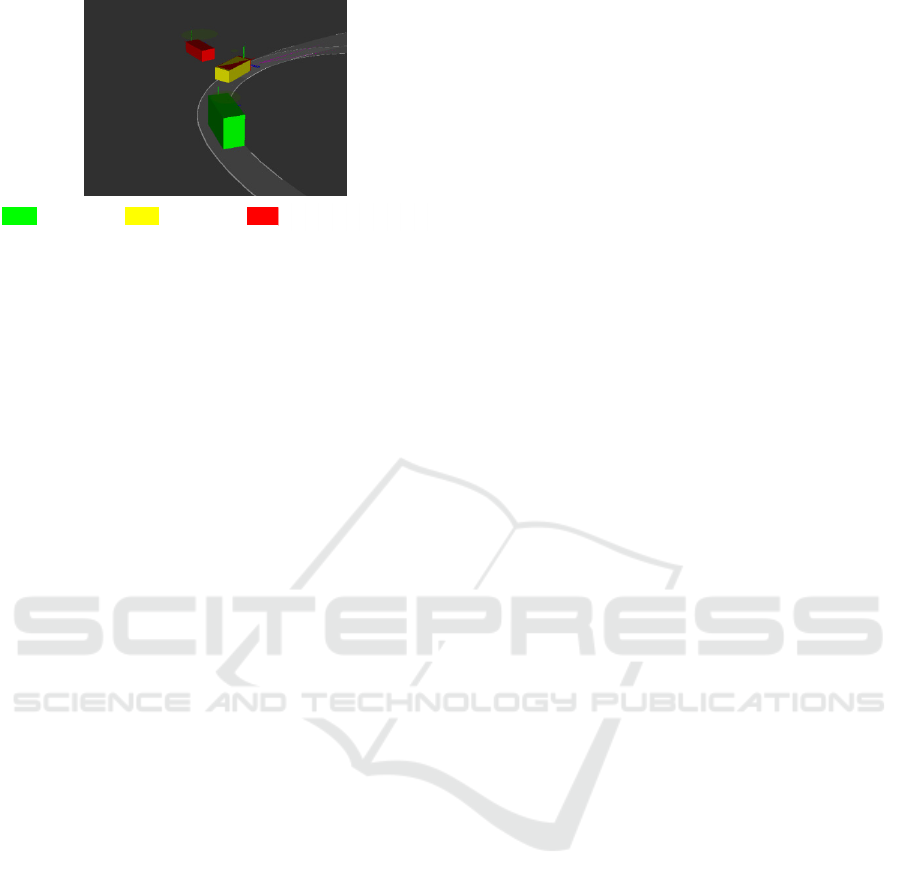
Figure 17: Long prediction with object leaving road.
The range of the communication has little
meaning for the benefit of the collective perception if
the distance to the received object in the CPM is
significantly larger than the sensor range and at the
same time the prediction time of the objects is very
short. This is particularly clear in scenario 2, where a
meaningful coasting process is interrupted again after
the end of the prediction period.
Despite higher awareness, the collective
perception cannot lead to lower fuel consumption in
every scenario. For example, when turning left in the
face of oncoming traffic, it is necessary to decelerate
to the maximum possible curve speed, which is close
to zero anyway.
6 CONCLUSIONS
In the presented paper, the benefits of collective
perception on fuel consumption were shown. A
system architecture with collective perception,
cooperative prediction and a maneuver planner that
allows energy-efficient driving was presented. The
correct functioning of the collective perception was
proven by simulations and real-world tests. In the
simulative evaluation, up to 0.526 l fuel could be
saved in individual situations. The analysis showed
that especially heavy trucks with high mass benefit
from the collective perception. In addition, it was
shown that a long prediction after which objects are
no longer perceived is a decisive factor for saving
fuel.
In future work, the simulative results regarding
fuel consumption with collective perception will be
confirmed in actual tests. Two cooperative trucks and
a test track are available for this purpose. According
to Burger et al. (2017), negotiated and collaborative
maneuver planning offer the greatest utility in
cooperative driving. Therefore, in the following
investigations, cooperative maneuver planning with
trajectories and their effect on fuel consumption will
be investigated in simulation as well as in real-world
tests.
ACKNOWLEDGMENTS
This work is supported by MAN Truck & Bus SE and
the IMAGinE (Intelligent Maneuver Automation -
cooperative hazard avoidance in realtime) project.
IMAGinE is founded by the German Federal Ministry
for Economic Affairs and Energy (BMWi).
CONTRIBUTIONS
As first and corresponding author, Juergen
Hauenstein initiated the paper, wrote the original
draft, defined the approach and contributed the main
parts of the conceptualization, methodology and
investigation goals. Jakob Gromer integrated the
perception modules, developed the planner module
with interfaces and evaluated the concept as a part of
his master thesis. Jakob Gromer contributed to the
conceptualization, methodology and investigation.
Jan Cedric Mertens contributed to driving tests
related to the collective perception and supported the
methodology with discussions and insights. Frank
Diermeyer and Sven Kraus contributed to the concept
of the research project and revised the paper for
intellectual content. Frank Diermeyer and Sven Kraus
gave final approval for the version to be published
and agree to all aspects of the work. As a guarantor,
Frank Diermeyer accepts responsibility for the
overall integrity of the paper.
REFERENCES
ADAC e. V. (2020). Welche Hersteller bieten bereits C2X
an? ADAC-Umfrage 6/2020. https://assets.adac.de/im
age/upload/v1595919606/ADAC-eV/KOR/Text/PDF/
Umfrage_Hersteller_Car2X_dl45xm.pdf.
Allig, C., & Wanielik, G. (2019). Dynamic Dissemination
Method for Collective Perception. In IEEE ITSC 2019:
2019 22st International Conf. on Intelligent
Transportation Systems (ITSC) Auckland, New Zealand,
October 27-30, 2019 (pp. 3756–3762). IEEE.
Almeida, T. T., C. Gomes, L. de, Ortiz, F. M., Junior, J. G.
R., & Costa, L. H. M. K. (2018). IEEE 802.11p
Performance Evaluation: Simulations vs. Real
Experiments. In IEEE ITSC 2018: 2018 21st Intl. Conf.
on Intelligent Transportation Systems (ITSC) Maui,
Hawaii, USA, November 4-7, 2018 (pp. 3840–3845).
IEEE. https://doi.org/10.1109/I TSC.2018.8569676.
Ego‐Vehicle CAMObject GlobalFusionObject
Collective Perception: Impact on Fuel Consumption for Heavy Trucks
359

An, N., & Specka, F. (2019). Entwicklung und Test
kooperativer Fahrfunktionen in virtueller Umgebung.
In Aaet Automatisiertes und Vernetztes Fahren:
Beiträge zum gleichnamigen 20. Braunschweiger
Symposium am 6. Und 7. Februar 2019, Stadthalle,
Braunschweig (1st ed.). ITS mobility e.V.
Baek, M., Jeong, D., Choi, D., & Lee, S. (2020). Vehicle
Trajectory Prediction and Collision Warning via Fusion
of Multisensors and Wireless Vehicular
Communications. Sensors (Basel, Switzerland), 20(1).
https://doi.org/10.3390/s20010288.
Biagiotti, L., & Melchiorri, C. (2009). Trajectory Planning
for Automatic Machines and Robots. Springer Berlin
Heidelberg. https://doi.org/10.1007/978-3-540-85629-0.
Botte, M., Pariota, L., D’Acierno, L., & Bifulco, G. N.
(2019). An Overview of Cooperative Driving in the
European Union: Policies and Practices. Electronics,
8(6), 1–25. https://doi.org/10.3390/electronics8060616.
Bundesministerium für Umwelt, Naturschutz und nukleare
Sicherheit (BMU). (2019). Klimaschutz in Zahlen:
Fakten, Trends und Impulse deutscher Klimapolitik.
https://www.bmu.de/fileadmin/Daten_BMU/Pools/Bros
chueren/klimaschutz_zahlen_2019_broschuere_bf.pdf.
Bunz, M., & Mücke, H.-G. (2017). Klimawandel –
physische und psychische Folgen [Climate change -
physical and mental consequences]. Bundes-
gesundheitsblatt, Gesundheitsforschung, Gesundheitss
chutz, 60(6), 632–639. https://doi.org/10.1007/s00103-
017-2548-3.
Burger, C., Orzechowski, P. F., Tas, O. S., & Stiller, C.
(2017). Rating cooperative driving: A scheme for
behavior assessment. In Ieee ITSC 2017: 20th
International Conference on Intelligent Transportation
Systems : Mielparque Yokohama in Yokohama,
Kanagawa, Japan, October 16-19, 2017 (pp. 1–6).
IEEE. https://doi.org/10.1109/ITSC.2017.8317794.
Delooz, Q., & Festag, A. (2019, November - 2019,
November). Network Load Adaptation for Collective
Perception in V2X Communications. In 2019 IEEE
International Conference on Connected Vehicles and
Expo (ICCVE) (pp. 1–6). IEEE. https://doi.org/
10.1109/ICCVE45908.2019.8964988.
Eiermann, L., Wirthmüller, F., Massow, K., Breuel, G., &
Radusch, I. (2020). Driver Assistance for Safe and
Comfortable On-Ramp Merging Using Environment
Models Extended through V2X Communication and
Role- Based Behavior Predictions. In 2020 IEEE 16th
International Conference on Intelligent Computer
Communication and Processing (ICCP 2020). IEEE.
Esch, T., & Dahlhaus, U. (2016). Antrieb. In E. Hoepke &
S. Breuer (Eds.), ATZ / MTZ-Fachbuch.
Nutzfahrzeugtechnik: Grundlagen, Systeme,
Komponenten (8th ed., pp. 403–540). Springer Vieweg.
European Center for Information and Communication
Technologies (EICT) GmbH. (2017). IMAGinE
Intelligente Manöver Automatisierung - kooperative
Gefahrenvermeidung in Echtzeit: Lösungen für
kooperatives Fahren. https://imagine-online.de/erge
bnisse-publikationen/
European Telecommunications Standards Institute (2014a-
11). Intelligent Transport Systems (ITS); Vehicular
Communications; Basic Set of Applications; Part 2:
Specification of Cooperative Awareness Basic Service
(ETSI EN 302 637-2). http://www.etsi.org.
European Telecommunications Standards Institute (2014b-
11). Intelligent Transport Systems (ITS); Vehicular
Communications; Basic Set of Applications; Part 3:
Specifications of Decentralized Environmental Noti-
fication Basic Service (ETSI EN 302 637-3). http://
www.etsi.org.
European Telecommunications Standards Institute (2019-
12). Intelligent Transport Systems (ITS); Vehicular
Communications; Basic Set of Applications; Analysis of
the Collective Perception Service (CPS); (Technical
Report ETSI TR 103 562). http://www.etsi.org.
European Telecommunications Standards Institute. (2020a,
November 4). Work Programme: Details of 'DTS/ITS-
00167' Work Item. https://portal.etsi.org/webapp/
WorkProgram/Report_WorkItem.asp?wki_id=46541.
European Telecommunications Standards Institute. (2020b,
November 4). Work Programme: Details of 'DTS/ITS-
00184' Work Item. https://portal.etsi.org/webapp/
WorkProgram/Report_WorkItem.asp?WKI_ID=53496
&curItemNr=1&totalNrItems=1&optDisplay=10&qSO
RT=HIGHVERSION&qETSI_ALL=&SearchPage=TR
UE&qETSI_NUMBER=103+561&qINCLUDE_SUB_
TB=True&qINCLUDE_MOVED_ON=&qSTOP_FLG
=&qKEYWORD_BOOLEAN=&qCLUSTER_BOOLE
AN=&qFREQUENCIES_BOOLEAN=&qSTOPPING
_OUTDATED=&butSimple=Search&includeNonActiv
eTB=FALSE&includeSubProjectCode=&qREPORT_T
YPE=SUMMARY.
Festag, A. (2015). Standards for vehicular communi-cation
— from IEEE 802.11p to 5G. E & I Elektrotechnik Und
Informationstechnik, 132(7), 409–416. https://doi.org/
10.1007/s00502-015-0343-0.
Fries, M. J. (2019). Maschinelle Optimierung der
Antriebsauslegung zur Reduktion von CO2-Emissionen
und Kosten im Nutzfahrzeug [Dissertation]. Technische
Universität München, München.
Ganesan, K., Lohr, J., Mallick, P. B., Kunz, A., &
Kuchibhotla, R. (2020). NR Sidelink Design Overview
for Advanced V2X Service. IEEE Internet of Things
Magazine, 3(1), 26–30.
https://doi.org/10.1109/IOTM.0001.1900071.
A.D.C. GmbH. (2017). SRR 20X /-2 /-2C /-21 Short Range
Radar. https://www.continental-automotive.com/geta
ttachment/e98ad36c-49d6-400f-8b99-32ff1ef4e45b/S
RR20X-Datasheet-EN.pdf.pdf.
Günther, H.-J. (2017). Collective Perception in Vehicular
Ad-hoc Networks [Dissertation]. Technische
Universität Braunschweig, Braunschweig.
Kenney, J. B. (2011). Dedicated Short-Range
Communications (DSRC) Standards in the United
States. Proceedings of the IEEE, 99(7), 1162–1182.
https://doi.org/10.1109/JPROC.2011.2132790.
Lehmann, B., Gunther, H.-J., & Wolf, L. (2018). A Generic
Approach towards Maneuver Coordination for
Automated Vehicles. In IEEE ITSC 2018: 2018 21st
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
360

International Conference on Intelligent Transportation
Systems (ITSC) Maui, Hawaii, USA, November 4-7,
2018 (pp. 3333–3339). IEEE. https://doi.org/10.
1109/ITSC.2018.8569442.
Lozano Domínguez, J. M., & Mateo Sanguino, T. J. (2019).
Review on V2X, I2X, and P2X Communications and
Their Applications: A Comprehensive Analysis over
Time. Sensors (Basel, Switzerland), 19(12).
https://doi.org/10.3390/s19122756.
Mahmud, S. M. S., Ferreira, L., Hoque, M. S., & Tavassoli,
A. (2017). Application of proximal surrogate indicators
for safety evaluation: A review of recent developments
and research needs. IATSS Research, 41(4), 153–163.
https://doi.org/10.1016/j.iatssr.2017.02.001.
Masson-Delmotte, V. (Ed.). (2018). Global Warming of 1.5
ºC: An IPCC Special Report on the impacts of global
warming of 1.5°c above pre-industrial levels and
related global greenhouse gas emission pathways, in
the context of strengthening the global response to the
threat of climate change, sustainable development, and
efforts to eradicate poverty. Intergovernmental Panel
on Climate Change (IPCC). https://www.ipcc.ch/sr15/
Mertens, J. C., Erb, D., Kraus, S., & Diermeyer, F. (2020).
ITS-G5 Antenna Position on Trucks. In 2020 IEEE
Intelligent Vehicles Symposium (IV). IEEE.
Molina-Masegosa, R., & Gozalvez, J. (2017). LTE-V for
Sidelink 5G V2X Vehicular Communications: A New
5G Technology for Short-Range Vehicle-to-Everything
Communications. IEEE Vehicular Technology
Magazine, 12(4), 30–39. https://doi.org/ 10.1109/MVT.
2017.2752798.
Naik, G., Choudhury, B., & Park, J.-M. (2019). IEEE
802.11bd & 5G NR V2X: Evolution of Radio Access
Technologies for V2X Communications. IEEE Access,
7, 70169–70184. https://doi.org/10.1109/ACCESS.2
019.2919489.
Nowak, G., Maluck, J., Stürmer, C., & Pasemann, J. (2016).
The era of digitized trucking: Transforming the
logistics value chain. PwC Strategy& Germany. https://
www.strategyand.pwc.com/media/file/The-era-of-digit
ized-trucking.pdf.
Robert Bosch GmbH. (2014). Chassis Systems Control:
Fourth generation long-range radar sensor (LRR4).
http://cds.bosch.us/themes/bosch_cross/amc_pdfs/LR
R4_292000P0ZH_EN_low.pdf.
Rudschies, W. (Ed.). (2020). C2X im VW Golf 8: Erster
ADAC Test. ADAC e. V. https://www.adac.de/rund-
ums-fahrzeug/tests/assistenzsysteme/c2x-im-vw-golf-8/
Schubert, R., Richter, E., & Wanielik, G. (2008).
Comparison and evaluation of advanced motion models
for vehicle tracking. In 2008 IEEE 11th International
Conf. on Information Fusion (pp. 730–735). IEEE.
Sjoberg, K., Andres, P., Buburuzan, T., & Brakemeier, A.
(2017). Cooperative Intelligent Transport Systems in
Europe: Current Deployment Status and Outlook. IEEE
Vehicular Technology Magazine, 12(2), 89–97. https://
doi.org/10.1109/MVT.2017.2670018.
Straßenverkehrs-Ordnung (StVO), May 18, 2017. https://
www.gesetze-im-internet.de/stvo_2013/
Straßenverkehrs-Zulassungs-Ordnung (StVZO), May 18,
2017. https://www.gesetze-im-internet.de/stvzo_2012/
Thandavarayan, G., Sepulcre, M., & Gozalvez, J. (2019).
Analysis of Message Generation Rules for Collective
Perception in Connected and Automated Driving. In
IEEE IV 2019: IEEE Intelligent Vehicles Symposium
(IV) Paris, France, June 09-12, 2019 (pp. 132–137).
IEEE.
Ulbrich, S., Grossjohann, S., Appelt, C., Homeier, K.,
Rieken, J., & Maurer, M. (2015). Structuring
Cooperative Behavior Planning Implementations for
Automated Driving. In 2015 IEEE 18th International
Conf. on Intelligent Transportation Systems (ITSC
2015): Las Palmas], Gran Canaria, Spain, 15 - 18
September 2015 (pp. 2159–2165). IEEE. https://doi.org
/10.1109/ITSC.2015.349.
Wang, Z., Bian, Y., Shladover, S. E., Wu, G., Li, S. E., &
Barth, M. J. (2020). A Survey on Cooperative
Longitudinal Motion Control of Multiple Connected
and Automated Vehicles. IEEE Intelligent Trans-
portation Systems Magazine, 12(1), 4–24. https://
doi.org/10.1109/MITS.2019.2953562.
Weber, R., Misener, J., & Park, V. (2019). C-V2X - A
Communication Technology for Cooperative,
Connected and Automated Mobility. In Mobile
Communication - Technologies and Applications; 24.
ITG-Symposium (pp. 111–116). VDE.
Wolff, S. (2016). Mehrzieloptimierung von schweren
Nutzfahrzeuggetrieben zur Verbesserung der
Transporteffizienz und der TCO [Semesterarbeit].
Technische Universität München, München.
Wood, M., Robbel, P., Maass, M., Tebbens, R. D., Meijs,
M., Harb, M., Reach, J., Robinson, K., Wittmann, D.,
Srivastava, T., Bouzouraa, M. E., Liu, S., Wang, Y.,
Knobel, C., Boymanns, D., Löhning, M., Dehlink, B.,
Kaule, D., Krüger, R.,. Schlicht, P. (2019). Safety First
for Automated Driving. Aptiv Services US, LLC; Audi
AG; Bayrische Motoren Werke AG; Beijing Baidu
Netcom Science Technology Co., Ltd; Continental Teves
AG & Co oHG; Daimler AG; FCA US LLC; HERE
Global B.V.; Infineon Technologies AG; Intel;
Volkswagen AG. https://www.daimler.com/dokumente
/innovation/sonstiges/safety-first-for-automated-driving.
pdf.
Collective Perception: Impact on Fuel Consumption for Heavy Trucks
361
