
The Forerunner UAV Concept for the Increased Safety of First
Responders
Mih
´
aly Nagy
1,2
, P
´
eter Bauer
1,2 a
, Antal Hiba
1,2 b
, Attila G
´
ati
1,2
, Istv
´
an Drot
´
ar
1
, Bal
´
azs Lattes
3
and
´
Ad
´
am Kisari
1,2
1
Research Center of Vehicle Industry, Sz
´
echenyi Istv
´
an University, Egyetem t
´
er 1, Gy
˝
or, Hungary
2
Institute for Computer Science and Control, ELKH, Budapest, Hungary
3
National Media and Infocommunications Authority, Budapest, Hungary
Keywords:
Forerunner UAV, First Responders, Basic Concepts, Wireless Communication.
Abstract:
This paper proposes a novel Forerunner UAV concept to increase the safety of first responders by monitoring
the road in front of their emergency ground vehicle (EGV) and notifying the driver about any violation of
his/her right of way or approaching danger. The developments are conducted in an R&D project in Hungary.
The proposed UAV for the planned urban demonstration is a hexacopter with triple redundant architecture
applying a gimbaled camera to monitor the surroundings. In the cooperative control of the EGV and UAV
the UAV must fly in front of the EGV which is possible through wireless communication of route data and
velocity. Besides the real system a computer simulation representation is also applied including CARLA and
Matlab to make exhaustive tests of the system capabilities. Increased attention is devoted to the possible
wireless communication solutions as these are safety critical parts of the system. The article ends with the lists
of planned simulation and real test scenarios to evaluate the system.
1 INTRODUCTION
Considering the overview works and statistics in
the US a major cause of the injury and death of
first responders besides injuries and deaths in action
is due to traffic incidents (crashes) see (Casey
C. Grant and Merrifield, 2011), (Donoughe et al.,
2012), (NHTSA, 2014), (Smith, 2015). Unfor-
tunately we could not find any EU statistics but
accidents involving first responders regularly happen
in Hungary. In May 2019 there was a crash in
the US (luckily with only minor injuries) caught
on video between a train and a police car (CNN,
2019) (https://edition.cnn.com/videos/us/2019/05/
22/train-hits-police-cruiser-newsource-orig.cnn)
because the police car did not see the approaching
train behind the other. An aerial view of the situation
could help the driver to avoid this accident as possibly
could help in several situations when the approaching
vehicle is covered from the driver. This has led us
to the idea to propose a Forerunner UAV (unmanned
aerial vehicle) which can fly in front of the emergency
a
https://orcid.org/0000-0002-1925-2270
b
https://orcid.org/0000-0002-5706-3550
ground vehicle (EGV) and monitor the road / area to
detect approaching vehicles and vehicles failing to
give the right of way. In case of hazard detection, the
driver should decrease speed and handle the situation.
Beyond risk alert, the minimum requirement is to
stream the aerial view to the driver of the EGV
to increase his/her situational awareness. Further
improvements can be to colour the area in front of
the vehicle (green = free route, red = danger, not
enough space to pass) and/or denote the threatening
vehicle(s) with red colour.
To the best of our knowledge, this Forerun-
ner UAV name has not been used in this meaning,
searching for forerunner drone/uav/aircraft/helicopter
in Google Chrome the best hits are:
• The forerunner position of a drone company (In-
side Unmanned Systems, 2019)
• A computer company (Forerunner Computer Sys-
tems, 2020)
• A computer game character (fandom.com, 2020)
• A sportwatch (Garmin, 2020)
so the Forerunner UAV name (and the concept) can
be considered completely new. This year (2020) a re-
362
Nagy, M., Bauer, P., Hiba, A., Gáti, A., Drotár, I., Lattes, B. and Kisari, Á.
The Forerunner UAV Concept for the Increased Safety of First Responders.
DOI: 10.5220/0010408203620369
In Proceedings of the 7th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2021), pages 362-369
ISBN: 978-989-758-513-5
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

search project is started in Hungary to evaluate the
feasibility of the Forerunner UAV concept and this
article is the first publication summarizing the initial
findings of the development.
Considering the literature about following and/or
supporting a ground vehicle (GV) by an aerial vehi-
cle several solutions can be found. First, there are
solutions helping the remote operator of the GV with
the aerial images taken by the UAV on demand of the
operator (Cantelli et al., 2013) or with continuously
streamed video (Harik et al., 2015). Second, solutions
utilizing aerial images in pre-planning of GV route
(Zoto et al., 2020) can be found. Third, there are so-
lutions on-line supporting the unmanned ground ve-
hicle (UGV) in path planning by processed informa-
tion from the UAV images (free paths, obstacles etc.)
(Lakas et al., 2018), (Peterson et al., 2018). Another
related source discusses the tracking of an UGV by a
UAV considering changes in UGV speed and heading
but constant UAV speed (Lee et al., 2003).
Considering the forerunner concept here the UAV
needs to fly in front of the EGV to have images about
forthcoming obstacles or threatening vehicles in ad-
vance. As nowadays the emergency vehicle drivers
navigate by their own GPS and probably they sud-
denly modify the route (especially in intersections)
based on their knowledge about the area its advisable
to plan and follow the route on-board the EGV and
follow the EGV with the UAV. So from the above lit-
eratue review the following of the GV by the UAV
(Lee et al., 2003) and the support of the GV opera-
tor (who is on-board the EGV in this case) through
streamed video (Harik et al., 2015) are the closest to
our concept but variable UAV speeds should be con-
sidered and the UAV must fly in front of the EGV.
This paper is an introduction of the basic concepts
considered in the design and development of the Fore-
runner UAV solution. Section 2 summarizes the hard-
ware system and the ideas for the cooperative control
concept between the EGV and UAV. Section 3 sum-
marizes the computer simulation concept of the over-
all forerunner system including the EGV, the UAV, the
camera sensor model and the related virtual 3D en-
vironment. Section 4 deals with the communication
issues regarding position and route data communica-
tion between the EGV and UAV and the streaming of
video from the UAV to the EGV. Section 5 gives an
overview about the planned simulation and real life
test scenarios to evaluate the pros and cons of the fore-
runner concept and demonstrate its basic capabilities
and finally Section 6 concludes the paper.
2 SYSTEM CONCEPT
In our approach, the UAV supplements the EGV to
extend its sensing capabilities. The aerial vehicle has
to be autonomous and has to follow or get ahead of the
EGV as the circumstances require. For example if the
EGV has to go through a crowded city center, it is ad-
vised for the drone to stay ahead relatively close to the
EGV in order to inspect the upcoming intersections.
On the other hand, in a highway or motorway scenario
the drone can get further ahead to identify obstacles,
providing the driver with extra time to safely reduce
speed.
Both of these cases prove that the UAV is not nec-
essarily following its companion rather leading the
group. However, the EGV is the one that dictates
the route. This problem can be solved if the UAV
knows the proposed path of the EGV. Therefore, at
the start of the journey, the destination, the planned
route and the initial course has to be sent to the drone.
Of course, this is not a final decision the EGV can al-
ter its route due to heavy traffic or other reasons, so
the UAV has to adapt to the emergency vehicle when-
ever it is necessary. To achieve this, the drone is com-
manded to stop at every intersection and wait for the
emergency vehicle, meanwhile scanning the environ-
ment for possible hazards. After it is evident which
way the EGV is going (from communication or the
motion of the EGV) the drone starts to go to the same
direction.
To be able to observe the surroundings of the
emergency vehicle, the UAV has to be equipped with
a camera preferably attached with a gimbal to en-
able independent movement relative to the drone. The
whole concept relies on the perception of the cam-
era, therefore it has to be carefully selected. The im-
age processing is highly dependent on the point of
view of the camera. Its task is to identify pedestrians
and vehicles and their position on the ground. The
current state of development suggests, that bounding
box (YOLO (Rekha B. S., 2020)) based identification
could be carried out real-time on the computer aboard
the drone.
From the above concept it is obvious that there has
to be some kind of communication between the UAV
and the EGV. Not only the planned route and course
has to be sent at the beginning but during move-
ment several data (including velocity and change of
plans) must be transmitted from the ground to the
aerial vehicle serving as the base of the cooperative
control. On the other hand, the UAV sends the risk
alerts, raw and/or (pre-)processed camera image to
the ground to help the driver. The place where im-
age processing is carried out is going to be deter-
mined by the performance of the on-board computer
The Forerunner UAV Concept for the Increased Safety of First Responders
363
of the drone. On-board image processing would pose
smaller challenge to the inter-vehicle communication
because post-processed images are much less data.
The communication issues are discussed in detail in
Section 4.
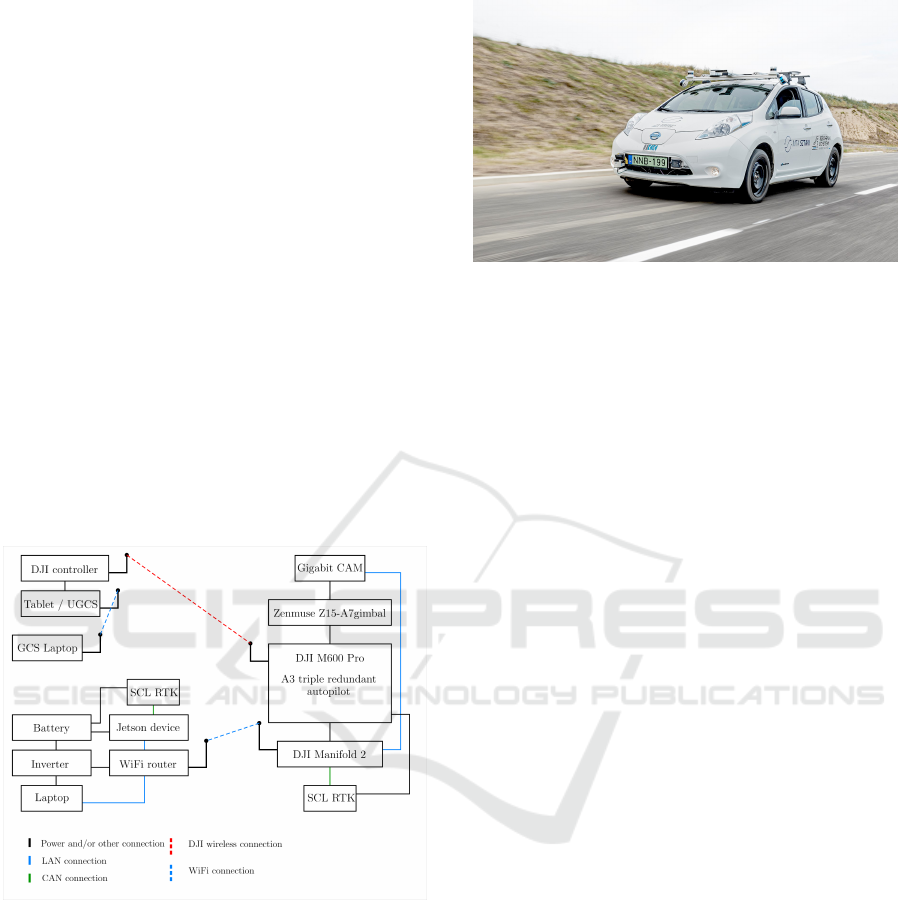
After the overall concept of the Forerunner UAV
system is described our proposed hardware scheme is
shown in Fig. 1.
As it can be seen in Fig. 1 our drone choice is the
DJI M600 Pro. The reason behind it is that it offers
redundancy on multiple levels, for example it features
six batteries, three sets of IMU sensors and six ro-
tors. This makes the device safer to fly, which is a
key feature when using it in possibly life-threatening
scenarios and also key for the approval of airspace
authorities. The drone is equipped with the DJI A3
autopilot system which will be completed with an on-
board computer the DJI Manifold 2 which is responsi-
ble for the high-level control and data collection from
the RTK GPS unit (SCL RTK in the figure) and cam-
era module. Furthermore, the communication with
the ground vehicle is also carried out by the Manifold
2 computer.
Figure 1: Hardware concept of the Forerunner UAV system.
Considering the drone choice a serious game stop-
per in the Forerunner UAV concept can be the limited
speed range of the available drones that is why an ex-
tensive search was done to have an overview about
the possibilities. The results are summarized in Table
1 (VTOL means vertical take-off and landing). As
the table shows most of the drones are only capable
to reach about 90 km/h maximum speed which can be
satisfactory in urban environment but is not enough on
country roads and freeways. However, the Schiebel
Camcopter’s 220 km/h maximum speed makes the
concept feasible in the future even on freeways. We
also assume that drone industry continues to produce
Figure 2: Nissan Leaf experimental ground vehicle.
better and so faster drones in near future.
Using a proper emergency response vehicle dur-
ing development and testing would be cumbersome so
we plan to employ our Nissan Leaf (see Fig. 2) test
vehicle as a substitute. The regular passenger car has
now been heavily modified to become an autonomous
vehicle test platform (Somogyi et al., 2018). It is
currently mounted with several sensors such as LI-
DARs, a radar, cameras, and high precision naviga-
tion sensors. It is also equipped with several compu-
tation units to handle data and control tasks. Though
it is capable of autonomously navigating we plan to
use it in human-driven mode as the ground vehicle of
the group while also taking advantage of the already
operational navigation system, on-board processing,
and user interface devices. However, as Fig. 1 shows
we also plan to develop a standalone ground segment
with battery, board computer, RTK GPS and commu-
nication module to be able to use it on any human
driven vehicle replacing the Leaf during the develop-
ments.
3 SIMULATION CONCEPT
As the real scenario testing capabilities are very lim-
ited due to the availability of the proving ground Za-
lazone (zalazone.hu/en) and they require much more
effort we only plan to show system capabilities in low
speed urban maneuvers (see Section 5). That’s why
an extensive simulation test campaign is very impor-
tant to evaluate the possible capabilities of the Fore-
runner UAV concept in all situations (see Section 5).
A realistic forerunner drone simulation (see Fig.
3) requires a drivable EGV, a drone with simulated
camera sensor, and an environment with other vehi-
cles and pedestrians. CARLA simulator (Dosovit-
skiy et al., 2017) with Unreal4 game development
engine provides a functional city with programmed
intersections, vehicle and walker AI (artificial intelli-
gence) agents, detailed simulated sensors (RGB cam-
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
364

Table 1: Drone types with maximum cruise speed.
Structure Type Max. speed [km/h]
VTOL Quantum Systems Vector 54-90
VTOL Quantum Systems Tron F90+ 64.8
VTOL UKR Spec Systems PD-1 90
VTOL L3Harris FVR-90 92.6
VTOL Blackswift S2 64.8
Quadcopter DJI M300 82
Quadcopter DJI Inspire 2 94
Quadcopter Freefly Alta X 95
Hexacopter DJI M600 Pro 64
Hexacopter Yuneec Typhoon H 70
Helicopter Schiebel Camcopter S-100 220
Figure 3: Fire truck with forerunner drone in intersection.
era, depth camera, LIDAR etc.) and a python API.
Into this solid basis we integrate our forerunner UAV
with the on-board camera system, our test scenarios
with other vehicles, and our image processing and de-
cision making logic. We plan to drive the EGV with
game controllers to make demonstrations more inter-
esting by involving the bystanders to drive the vehicle.
The dynamics of the Forerunner UAV is simulated in
Matlab (visulaization done in CARLA) and an UDP-
based communication (similar to the real system) is
implemented between the Matlab (UAV) and CARLA
(EGV) part (see Fig. 4).
Figure 4: Main components of the simulator and their tasks.
Fig. 4 summarizes the main components of our
simulator. The basis of the simulator is CARLA
which can be modified in Unreal editor. A firetruck
is added as a version of an existing drivable truck
in CARLA, while the drone is a base vehicle pawn,
which can be manipulated through the python API
according to our own Matlab simulation. PyGame
part is responsible for the user interface of the driver
(steering wheel or keyboard). PyVision is our image
processing and decision making module, which can
run on a separate computer.
The Matlab Simulink UAV simulation incorpo-
rates detailed attitude and position dynamics, mod-
eling of the propulsion system and the implemented
control method. The control loop uses the incom-
ing data from the EGV (velocity and planned route)
to be able to maintain a certain distance in front of
it. After calculating the displacement and heading of
the drone, the data is sent to the CARLA simulation
which then draws the model accordingly. The param-
eterization of the drone model is done to represent a
similar model to the DJI M600 Pro planned to be ap-
plied during the real life tests of the Forerunner UAV
system.
The drone should detect other vehicles, cyclists
and pedestrians to decide if the EGV can pass the
intersection at high speed or not. To do this, a 3D
semantic map of the neighborhood of the intersec-
tion should be generated from camera images (or
from higher altitudes a 2D semantic map with YOLO
for example). The simulation environment will also
give us the possibility to develop gimbal management
strategy(s) for the monitoring of the intersection, and
to define the required time and frame rate for decision
on the safe EGV pass.
The first version of our image processing is based
on a semantic segmentation of drone camera accord-
ing CityScapes concept (Cordts et al., 2016). The out-
put of the simulator is not given back to the PyGame
module because we will possibly send only decisions
to the EGV from the UAV if the wireless communi-
cation capabilities are too limited. However, we plan
The Forerunner UAV Concept for the Increased Safety of First Responders
365

to stream the video to the EGV and it is possible that
processed images will also be sent to the EGV to give
more insight in the case of a stalled situation.
After simulation testing in urban scenarios coun-
try road and freeway scenarios will be implemented
and tested as listed in Section 5.
4 COMMUNICATION ISSUES
As stated before, the communication between the
UAV and the EGV will be crucial in the success of the
Forerunner UAV system that is why extensive com-
parison of possible solutions and even communica-
tion system tests are conducted in this early stage of
the project.
One of the best possible solutions is to establish
a connection according to the IEEE 802.11 standard.
Nowadays these systems work on the 2400-2483.5
MHz, 5150-5875 MHz, and 57-71 GHz frequency
bands. The devices that use 802.11 protocol for com-
munication are simple radio units, but these systems
are robust and interference tolerant.
The standard uses the ISM frequency bands for
communication. The ISM bands are free to use, so
the operation on these frequencies is only limited by
the regional legislation. Furthermore, the 802.11 stan-
dard’s additional advantage is the 15-20 ms typical
response time (this is the minimal expected limit).
The popularity of the standard is shown by the
fact that throughout the years several versions of the
original standard has been published. The new stan-
dards introduced new frequency band usage, higher
data rate, and more robust modulations. The current
newest standard is the Wi-Fi 6, which is described in
the 802.11ax standard. Table 2 shows the data rate
calculation for 802.11ac standard.
Values shown in the table are not the maximum
data rates that the standard describes (256-QAM).
The selection was based on several factors, like the
phase distortion caused by motion, and destructive
or additive interference according to the phase differ-
ence of multipath signals. As for the code ratio, the
same pattern can be seen. The chosen values are more
robust than the highest ratio of the standard. Regard-
ing the guard interval (GI) the table has calculations
for 400 ns and 800 ns as well. Considering the ap-
plication, the higher 800 ns values can guarantee the
fail-safe functionality in an environment with reflec-
tions. The calculations for the video signal should be
evaluated by these factors.
The Forerunner UAV application can apply two pos-
sible variations:
• FHD video signal streaming to a vehicle, where
the post-processing happens;
• The post-processing happens on-board of the
UAV, and the results are being transferred to the
vehicle in an array.
In the first situation, calculating with the display
ratio (1920x1080) and using the H.264 (HVC) video
compression, 8.5 Mb/s data rate can be estimated.
While with the H.265 (HEVC) compression only 4.4
Mb/s for a 30 frame/sec video stream.
In the second version, the display format should
be at least 4CIF which is 704x480 pixel, with the
application of H.264 compression there should be
around 1.6 Mb/s regarding the data rate. Meanwhile
the H.265 method should provide the average 0.8
Mb/s data rate.
For the calculations, the urban areas are the most
critical (see Fig. 5). In these areas where the device
distributions are very dense, the proper performance
must be guaranteed. The interference in these areas
is significantly higher and the systems must change
to less crowded frequency band (for stable data trans-
mission) even in a 100 m radius. In case of Active
Scan, it needs higher data rate (min. 4 Mb/s) for a
30 ms scanning every 5 second. If the vehicle moves
with 50 km/h there will be around 70 m distance be-
tween two measurement.
Figure 5: Number of Access Points in Budapest (bobzilla
et al., 2020).
Another problem regarding the 802.11 standard,
is that the devices can order more users to the avail-
able spectrum. The regulations define three layers of
users. The second- and third-layer devices cannot in-
terfere with the first layer applications. This applies to
the second- and third-layer’s relationship too. In con-
clusion the third layer devices cannot cause any in-
terference to the first- and second-layer systems. The
previously mentioned applications in the 2400-2483.5
MHz and 5150-5875 MHz frequency bands are third
layer devices.
The other possibility is the civilian MFCN net-
work with LTE and NR services. These technologies
have similar or lower response time than the 802.11
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
366
Table 2: Maximum theoretical data rates.
Spatial stream Modulation Code ratio
Maximum theoretical data rate
20 MHz channel 40 MHz channel
GI 800 ns GI 400 ns GI 800 ns GI 400 ns
1x1 SISO 16-QAM 1/2 26 Mb/s 28.9 Mb/s 54 Mb/s 60 Mb/s
1x1 SISO 16-QAM 3/4 39 Mb/s 43.3 Mb/s 81 Mb/s 90 Mb/s
1x1 SISO 64-QAM 2/3 52 Mb/s 57.8 Mb/s 108 Mb/s 120 Mb/s
1x1 SISO 64-QAM 3/4 58.5 Mb/s 65 Mb/s 121.5 Mb/s 135 Mb/s
2x2 MIMO 16-QAM 1/2 52 Mb/s 57.8 Mb/s 108 Mb/s 120 Mb/s
2x2 MIMO 16-QAM 3/4 78 Mb/s 86.7 Mb/s 162 Mb/s 180 Mb/s
2x2 MIMO 64-QAM 2/3 104 Mb/s 115.6 Mb/s 216 Mb/s 240 Mb/s
2x2 MIMO 64-QAM 3/4 117 Mb/s 130.3 Mb/s 243 Mb/s 270 Mb/s
systems. For the LTE connections the average re-
sponse time is around 10-15 ms. The 5G NR system’s
can be 1ms (NOKIA, 2016) depending on the applica-
tion. These particular systems work with wider range
of frequency bands (700 MHz, 800 MHz, 1800 MHz,
2100 MHz, 3,5 GHz, . . . ) where they have priority
channel utilization. The above-mentioned bands are
dedicated for a specific service provider. In this sit-
uation the placements of base stations are limited to
more occupied areas, like cities and roads. In rural
areas only the UMTS network can be ensured, which
cannot provide the appropriate values for the commu-
nication.
Overall, the urban areas are suitable for MFCN (or
not civilian PPDR and BBDR) system usage, and ru-
ral areas are convenient for the 802.11 networks.
A preliminary test was also run to determine the
latency of wireless image transmission between two
hosts. IEEE 802.11n compliant devices were used op-
erating in the 5 GHz mode with the use of two spatial
streams at a channel width of 40 MHz. The sender
was connected to a Cisco E2000 wireless router via
WLAN, while the receiver communicated with the
router on Gigabit ethernet. Using the 64-QAM modu-
lation scheme the standard provides a 300 Mb/s max-
imum theoretical data rate. In our case an effective
data rate of 115 Mbit/s was measured. We applied
NewTek’s NDI API to produce video streams both in
low and high resolutions. In both cases the frame rate
was 20 fps. Table 3 shows the results.
Table 3: Latency of Video Transmission Tests.
Resolution Latency
640x480 30 ms
1440x1080 40 ms
Table 4: List of Abbreviations.
Abbreviation Definition
4CIF
4xCommon Intermediate For-
mat
AP Acces Point
BBDR
Broadband Public Protection
and Disaster Relief
FHD Full High Definiton
GI Guard Intervall
LTE Long Term Evolution
MFCN
Mobile/Fixed Communication
Network
MIMO Multiple Input Multiple Output
NR New Radio
PPDR
Public Protecion and Disaster
Relif
QAM
Quadrature Ampltide Modula-
tion
SISO Single Input Single Output
WLAN Wireless Local Area Network
5 TARGETED TEST SCENARIOS
The goal of the simulation campaign is to extensively
test the capabilities of a possible forerunner system
considering scenarios from urban to freeway as first
responders can operate in any of these scenarios. The
planned test scenarios and situations are:
• EGV approaches an intersection with traffic light
(red to the EGV) or priority to the right and
crosses straight. Car coming from right stops or
not.
• EGV approaches an intersection with traffic light
(red to the EGV) or priority to the right and turns
left. Car coming from right and/or front stops or
not.
• EGV approaches a crowded intersection with traf-
fic light (red to the EGV) or priority to the right
The Forerunner UAV Concept for the Increased Safety of First Responders
367

and crosses straight. Cars before the crossroad get
out of the way except for one and/or car coming
from right stops or not.
• EGV approaches a roundabout where other vehi-
cles stop to give way or not.
• EGV drives with high speed on a country road,
other vehicles give way on the road and at cross-
roads or not.
• EGV drives with high speed on a curved country
road, other vehicles give way or not.
• EGV approaches a slow vehicle on a country road
is it possible to overtake or not?
• EGV drives on a freeway, other vehicles give way
or not, vehicle with technical breakdown causes a
problem.
The goal of the real demonstration is to show
the basic capabilities of a Forerunner UAV sys-
tem. Considering the features of the targeted proving
ground Zalazone (zalazone.hu/en) this demonstration
is planned in a low speed artificial urban environment,
the so called Smart City. The planned scenarios are:
• EGV approaches an empty intersection with pri-
ority to the right and crosses it straight.
• EGV approaches an intersection with priority to
the right and crosses it straight. Car coming from
right stops, EGV continues.
• EGV approaches an intersection with priority to
the right and crosses it straight. Car coming from
right does not stop, EGV must brake.
• EGV approaches an empty intersection with pri-
ority to the right and turns left.
• EGV approaches an intersection with priority to
the right and turns left. Other vehicles coming
from front and/or right all stop, EGV continues.
• EGV approaches an intersection with priority to
the right and turns left. Other vehicles coming
from front and/or right do not stop all, EGV must
brake.
6 CONCLUSIONS
This paper introduces the Forerunner UAV concept
which to the best of the authors knowledge is a new
idea. It includes an UAV equipped with an on-board
camera flying in front of the emergency ground vehi-
cle (EGV) and checking if its right of way is provided
or not. It can notify the driver, stream the video to the
driver of the EGV and in improved versions can also
highlight the dangerous vehicles / spots on the video
image. This can decrease the risk of traffic accidents
involving EGVs and so increase the safety of first re-
sponders.
After presenting this concept the article introduces
the main topics discussed during the early develop-
ment of the system and the findings of these discus-
sions.
The overall system concept is based-on the coop-
erative control of the EGV and UAV where the UAV
should fly in front of the EGV knowing its planned
route but stopping and waiting for it in every intersec-
tion to be able to adapt to sudden route changes. The
DJI M600 Pro hexacopter was selected as the UAV
because of its triple redundant architecture and pay-
load capacity. The demonstration ground vehicle is
planned to be the Nissen Leaf vehicle of the research
group but an independent ground segment will be de-
signed which can be easily installed on any ground
vehicle with proper load capacity.
As the planned real demonstrations will cover
only a limited subset of the required capabilities of
the system an extensive simulation test campaign is
planned to evaluate all of the capabilities. This is built
on the CARLA simulator with Unreal engine simulat-
ing the EGV and its environment. The UAV is simu-
lated in Matlab Simulink and an UDP protocol-based
communication similar to the real one provides the
connection between them. Simulated camera images
are generated in CARLA and the image processing is
planned to be done on a separate computer.
As the communication of planned route and the
video stream between the EGV and UAV is a crucial
safety critical part of the system a separate section is
devoted to the communication possibilities and sys-
tem tests focusing on data rates and delays.
Finally, the last section summarizes the planned
simulation and real demonstration scenarios attempt-
ing to cover the whole range of possible situations.
Future work includes the selection of the commu-
nication devices and protocols, the detailed design,
tuning and testing of the cooperative EGV-UAV con-
trol, the detailed set up of the simulation environment
together with the generation of the 3D semantic map
and the decision about the safety of the EGV and the
evaluation of the results. The real demonstration sce-
narios will be refined and set up based on the simula-
tion results and experiences.
REFERENCES
bobzilla, arkasha, and uhtu (2001-2020). Wigle.net All the
networks. Found by everyone.
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
368

Cantelli, L., Mangiameli, M., Melita, C. D., and Muscato,
G. (2013). UAV/UGV cooperation for surveying oper-
ations in humanitarian demining. In 2013 IEEE Inter-
national Symposium on Safety, Security, and Rescue
Robotics (SSRR), pages 1–6.
Casey C. Grant, P. and Merrifield, B. (2011). Analysis of
Ambulance Crash Data. Technical report, Fire Protec-
tion Research Foundation.
CNN (2019). Car hit by train after avoiding crossing arm.
Cordts, M., Omran, M., Ramos, S., Rehfeld, T., Enzweiler,
M., Benenson, R., Franke, U., Roth, S., and Schiele,
B. (2016). The cityscapes dataset for semantic urban
scene understanding. In Proc. of the IEEE Conference
on Computer Vision and Pattern Recognition (CVPR).
Donoughe, K., Whitestone, J., and Gabler, H. C. (2012).
Analysis of firetruck crashes and associated firefighter
injuries in the united states. Annals of advances in
automotive medicine. Association for the Advance-
ment of Automotive Medicine. Annual Scientific Con-
ference, 56:69–76.
Dosovitskiy, A., Ros, G., Codevilla, F., Lopez, A., and
Koltun, V. (2017). CARLA: An open urban driving
simulator. In Proceedings of the 1st Annual Confer-
ence on Robot Learning, pages 1–16.
fandom.com (2020). Halo alpha.
Forerunner Computer Systems (2020). Forerunner Com-
puter Systems - Making Computers Simple.
Garmin (2020). Garmin forerunner 745 watch.
Harik, E. H. C., Gu
´
erin, F., Guinand, F., Breth
´
e, J., and
Pelvillain, H. (2015). UAV-UGV cooperation for ob-
jects transportation in an industrial area. In 2015
IEEE International Conference on Industrial Technol-
ogy (ICIT), pages 547–552.
Inside Unmanned Systems (2019). One Ultra-Endurance
LEAP for UAVs.
Lakas, A., Belkhouche, B., Benkraouda, O., Shuaib, A., and
Alasmawi, H. J. (2018). A Framework for a Cooper-
ative UAV-UGV System for Path Discovery and Plan-
ning. In 2018 International Conference on Innova-
tions in Information Technology (IIT), pages 42–46.
Lee, J., Huang, R., Vaughn, A. F., Xiao, X., Hedrick, J.,
Zennaro, M., and Sengupta, R. (2003). Strategies of
Path-Planning for a UAV to Track a Ground Vehicle.
In In Proc. of the AINS 2003 conference.
NHTSA (2014). The National Highway Traffic Safety Ad-
ministration and Ground Ambulance Crashes.
NOKIA (2016). 5G for Mission Critical Communication.
Technical report, Nokia.
Peterson, J., Chaudhry, H., Abdelatty, K., Bird, J., and
Kochersberger, K. (2018). Online Aerial Terrain Map-
ping for Ground Robot Navigation. Sensors, 18(2).
Rekha B. S., Athiya Marium, D. G. N. S. S. A. S.
(2020). Literature survey on object detection using
yolo. International Research Journal of Engineering
and Technology (IRJET).
Smith, N. (2015). A National Perspective on Ambu-
lance Crashes and Safety. Guidance from the National
Highway Traffic Safety Administration on ambulance
safety for patients and providers. EMS world, 44:91–
2, 94.
Somogyi, H., Pup, D., K
¨
or
¨
os, P., Mihaly, A., and Soume-
lidis, A. (2018). Research of Required Vehicle System
Parameters and Sensor Systems for Autonomous Ve-
hicle Control. In 2018 IEEE 12th International Sym-
posium on Applied Computational Intelligence and
Informatics (SACI), pages 000027–000032.
Zoto, J., Musci, M. A., Khaliq, A., Chiaberge, M., and
Aicardi, I. (2020). Automatic Path Planning for Un-
manned Ground Vehicle Using UAV Imagery. In
Berns, K. and G
¨
orges, D., editors, Advances in Ser-
vice and Industrial Robotics, pages 223–230, Cham.
Springer International Publishing.
The Forerunner UAV Concept for the Increased Safety of First Responders
369
