
Biometric Authentication System based on Hand Geometry and
Palmprint Features
Laura Gulyás Oldal and András Kovács
John von Neumann Faculty of Informatics, Óbuda University, Budapest, Hungary
Keywords: Palmprint, Hand Geometry, Biometric Authentication.
Abstract: In today’s society, biometric authentication has gained more significance, since it uses physical characteristics
of a person for identification. Physical features provide greater security compared to ownership or knowledge
based factors. More and more physiological measures prove to be great characteristics for personal
authentication. A multimodal biometric authentication system has the advantage of using multiple physical
characteristics for authentication achieving greater accuracy. If one modality fails to identify a person with
high accuracy, other modalities are employed. However, in these kind of systems, every modality has a
different imagery data requirement, which provides multiple captured images for evaluation. The method
described in the article uses the same input data for processing multiple physiological features at once.
Biometric characteristics used by the system are hand geometry and palmprint features. The imagery data
requirement is a high-resolution image of a well-lit hand with dark background. Capturing the image in good
sanitary conditions has become an important requirement in the past few years. Advantage of a high-resolution
image compared to images captured with dedicated hardware devices like fingerprint or palmprint scanners,
is contactless capturing of the image. Another benefit of a high-resolution camera usage is lower cost claims
compared to the other systems using dedicated hardware for image capturing.
1 INTRODUCTION
Biometric authentication has become an important
topic in security systems, as it is used for automated
identification, criminal or forensic applications and
access control systems. Some of the physiological
features of a person suitable for authentication are
fingerprint, palmprint, palm vein features, face
characteristics, hand geometry features, etc.
(Golfarelli, 1997).
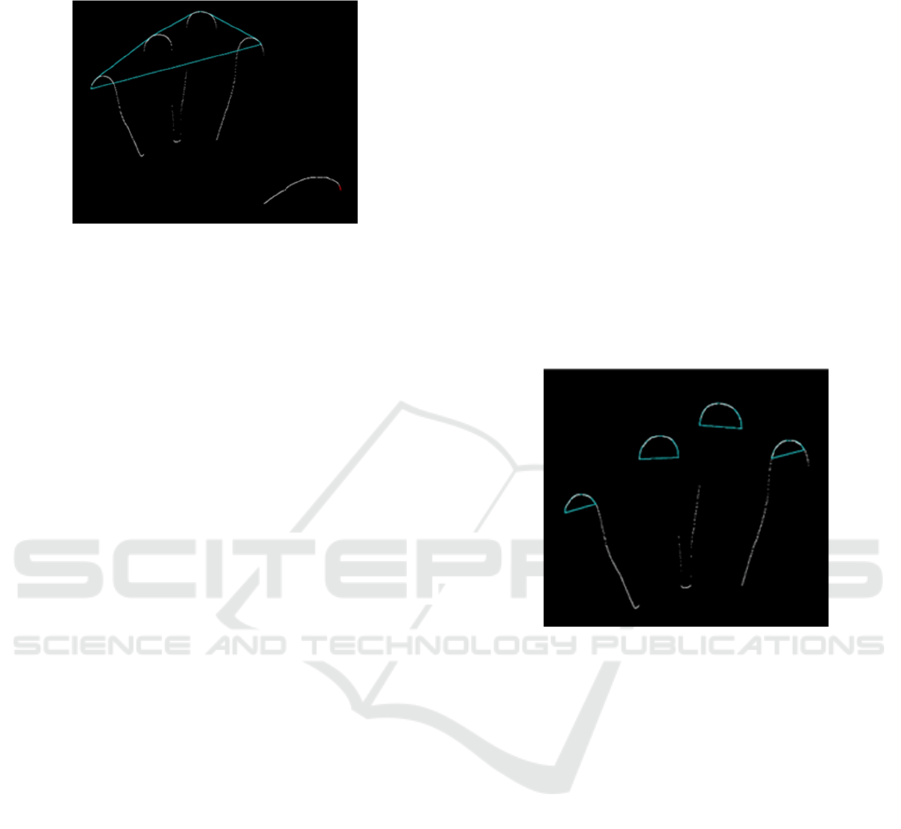
Figure 1: The convex hull of the point set after the auxiliary
point removal.
A palmprint consists of multiple characteristics
suitable for authentication, such as: wrinkles,
epidermal ridges and principal lines. The principal
lines of a palm provide quality measures for
identification with high confidence. Some of the hand
geometry features, appropriate for identification are
finger lengths, and widths, maximal inscribed circle
radius, palm area, width and height, finger
proportions, etc. Features of the hand and palm can be
extracted from a single high-resolution image. The
aggregation of hand geometry and palmprint features
in the system provides a more reliable authentication
system using only one imagery data. The proposed
method is an improved version of our previously
published work (Gulyás Oldal, 2020). The main
improvements of the current method are simpler
keypoint detecting algorithms and testing the method
on a much larger data set. The simplified algorithms
provide the same results as the original solution, but
with a much smaller margin of error. Another
improvement made in the current version of the
method is the performance improvement of key point
detection. As the key point detecting algorithms do
not require a high resolution image, the algorithms
58
Oldal, L. and Kovács, A.
Biometric Authentication System based on Hand Geometry and Palmprint Features.
DOI: 10.5220/0010408900580065
In Proceedings of the International Conference on Image Processing and Vision Engineering (IMPROVE 2021), pages 58-65
ISBN: 978-989-758-511-1
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
use a downsized version of the original image, which
results in much shorter run time.
Figure 2: Two categories of the hull.
The imagery data requirement for the proposed
method is a high-resolution image containing the
entire hand, the foreground has to be well lit, while
the background has to be as dark as possible. Another
prerequisite of the image is the vertical orientation of
the hand, as the image is not rotated during keypoint
detection.
2 RELATED WORKS
In this section we give a brief overview of some
methods using hand geometry or palmprint features
for personal authentication.
In (Badrinath, 2012) the authors propose a
method for palmprint based recognition where the
palmprint is divided into several blocks, which are
further processed using principal component analysis
(PCA). The features used for matching are the phase-
differences of the vertical and horizontal phase. The
feature matching algorithm computes the Hamming
distance of features and uses the given values for the
calculation of matching score. The method has an
EER (equal error rate) value of 0.25%.
Method described in (Li, 2012) uses a unique
approach for palmprint matching. The authors of the
paper consider the improper alignment of ROI-s of
two palmprints to be the biggest flaw of most existing
palmprint matching methods. The correct alignment
of the ROI-s is achieved by extracting the palmprint
principal lines and computing the adequate rotation
and translation values with ICP (Iterative Closest
Point) algorithm. Given the properly aligned
palmprint images, an arbitrary method for palmprint
feature extraction and recognition method is used.
The authors achieved the best results using the
CompCode (Huang, 2008) method, which uses Gabor
filters in six different orientations for the direction
estimation of palmprint image points. The
CompCode method alone has an EER value of
0.0388%, while in joint with the proposed method
had an EER value of 0.0201%. The additional step
results in increased feature extraction and matching
time as well.
The method proposed in (Badrinath, 2012) shows
great results, however, the authors assume the proper
alignment of the ROI-s. In (Li, 2012) method the
authors propose a method for proper feature map
alignment using the palmprint principal lines. The
method is used as an additional step of existing
palmprint recognition methods. The features
extracted for ROI alignment and palmprint matching
may differ. Our method uses a similar approach,
however, the palmprint principal lines are used for
ROI alignment and palmprint matching as well,
which results in a simpler implementation of a
palmprint recognition system.
Figure 3: 4 subcategories of the second group and classified
points.
3 HAND GEOMETRY
CHARACTERISTIC POINT
DETECTION
3.1 Preprocessing
The preprocessing of the imagery data consists of
gray scaling, downsizing, binarization, noise removal
and morphological edge detection. The key point
detection does not require a high resolution image,
therefore, the original image is downsized. This step
provides greater efficiency for keypoint detecting
algorithms and hand geometry feature extraction. The
palm feature extracting algorithms are executed on
the original image, as the palm lines require high
resolution image for extracting quality principal line
features. Subsequently, the downsized image is
binarized with a threshold determined by Otsu’s
method. Having very different intensities of the
Biometric Authentication System based on Hand Geometry and Palmprint Features
59

foreground and background insures satisfactory
results using Otsu’s algorithm (Xu, 2011). As the
binarized image contains significant amount of noise,
the most effective method for noise removal is blob
detection followed by filtering the largest blob
(Grycuk, 2014). The extracted blob is the object
defined by the shape of hand. This is an improvement
of the previously published method, it is less sensitive
to lighter areas of the background. The original
method used median-filter for reducing noise, which
proved to be effective only on inputs having almost
completely black background. Any reflected light
from the background causes non salt and pepper
noise. The median-filter is not an effective method for
the removal of bigger noise objects, consequently,
this step had to be introduced.
Figure 4: The reduced point set for finger valley detection.
Figure 5: The output of the finger valley detection.
Figure 6: Calculated finger lengths.
Figure 7: Calculated maximal inscribed circle.
The next step of preprocessing the image is
morphological edge detection. The morphological
operations used for one-pixel thick edge extraction
are erosion and subtraction (Hsiao, 2005)
(Maksimović, 2020).
3.2 Fingertip Detection
Given the image containing one-pixel thick edges, the
algorithm determines the fingertips. The set of edge
points is reduced by retrieving the topmost points of
every column on the image. The hull displayed on
Fig. 1 is determined by multiple operations including
Graham scan (Graham, 1972). With the analysis of
the distances between successive points, the right or
left orientation of the hand can be determined.
Subsequently, the hull points are classified to the
following two groups:
• group of thumb points
• group of remaining four fingertip points.
The two categories are displayed on Fig. 2, the
points of thumb are marked with red color, while the
other category is marked with a blue color. The
middle point from the first group is selected and
represents the fingertip of the thumb. The second
category is divided to four additional groups
displayed on Fig. 3, and the remaining four fingertips
are determined by selecting the local maxima from
every group.
3.3 Wrist Point Detection
Wrist point detection is essential for hand area
computation as the image section below the wrist
cannot be included during hand area computation.
The mentioned image section is not part of the hand,
but the arm. The wrist point detection method
described in (Gulyás Oldal, 2020) proved to be
inaccurate in case of inadequate light conditions on
the imagery data. The algorithm described below
IMPROVE 2021 - International Conference on Image Processing and Vision Engineering
60

proved to be much more effective in different light
conditions.
The detection starts with extraction of the leftmost
and rightmost edge points in each row, followed by
filtering the points below the thumb. The average
distances between the rightmost and leftmost points
are calculated for every row considering former n
distances as well.
The wrist points are determined by the points with
the biggest rate of change of average distances.
3.4 Finger Valley Detection
The finger valley search starts with elimination of
leftmost and rightmost points from the set of edge
points.
Figure 8: Points for ROI extraction.
The edge points are reduced further by defining a
circle, as follows:
• Centre: 𝐶𝑂𝑀
• Radius: 𝑘 ∙ 𝑑𝑖𝑠𝑡𝐶𝑂𝑀, 𝑚𝑖𝑑𝑑𝑙𝑒_𝑓𝑖𝑛𝑔𝑒𝑟_𝑡𝑖𝑝,
where 𝐶𝑂𝑀 is the center of mass of the hand,
𝑑𝑖𝑠𝑡𝐶𝑂𝑀, 𝑚𝑖𝑑𝑑𝑙𝑒_𝑓𝑖𝑛𝑔𝑒𝑟_𝑡𝑖𝑝 the distance
between the tip of middle finger and center of mass
and 𝑘 a free parameter (𝑘0.55 in the implemented
algorithm). The points inside the circle are kept, the
remaining points are eliminated. The filtered point set
is displayed on Fig. 4.
The following steps of finger valley detection
include blob detection. The blobs extracted are four
objects, where every blob contains points of one
valley (Grycuk, 2014)[4]. The valleys between the
fingers are finally determined by discovering the local
minimum for every object. The detected finger valley
points are displayed on Fig. 5. The process of valley
detection is significantly simplified compared to the
original version (Xu, 2014), as the initial method had
a large margin of error. The original process of valley
detection comprised of multiple steps built on each
other, which made the algorithm more error prone.
The improved method determines the points of
valleys independently from each other.
4 HAND GEOMETRY FEATURES
AND MATCHING
Absolute hand geometry measurements like finger
proportions, lengths or maximal inscribed circle need
to be calculated with respect to other measurements
for the features to be resolution independent
(Rutkowski, 2014).
The features considered during matching are the
following:
• Finger length proportions (with respect to the
middle finger length)
• Area of the largest inscribed circle (with
respect to the area of the hand) (Sanchez-
Reillo, 2000)
• Middle finger length (with respect to the area
of the hand) (Bača, 2012)
The considered finger lengths are the distances
between fingertip and finger valley points. Points
used for finger length calculation are displayed on
Fig. 6. The proportion of finger lengths characterize
well a hands geometrical characteristics. Finger
length proportions are a good descriptor of the hand’s
geometrical attributes (Sanchez-Reillo, 2000).
The finger length proportions are calculated with
respect to the middle finger length, as it proved to
have steadiest position among the fingers.
Another great descriptor of the hand shape is the
area or radius of the largest inscribed circle (Sanchez-
Reillo, 2000).
In the implemented solution, the largest inscribed
circle is determined with a modified hill climbing
algorithm (Kumar, 2003) (Ohashi, 2003). The
detected circle with this method is displayed on Fig.
7. The similarity between two hands geometrical
features is computed with the following formulas:
𝑭 𝑡
.,
1
4
𝐿
1
4
𝐿
1
4
𝐿
1
4
𝐿
∙ 100
(1)
𝑨𝑡
.,
𝑇′
∙ 100
(2)
𝑳𝑡
.,
𝐿′
∙ 100
(3)
𝑯
𝟐
𝟖
𝑨
𝟑
𝟖
𝑭
𝟑
𝟖
𝑳
(4)
Where:
• 𝐿′
– 𝑖-th finger length proportion
difference
• 𝑇′
– maximal inscribed circle area
difference
• 𝐿′
- middle finger length difference
Biometric Authentication System based on Hand Geometry and Palmprint Features
61
• 𝑡
,
𝑥
𝑎function, which normalizes
the input to the
𝑎, 𝑏
range
• 𝐹 – finger proportion similarity
• 𝐴 – maximal inscribed circle area difference
• 𝐿 – finger length difference
• 𝐻 – total hand geometry similarity
The weights of measurements considered during
similarity level calculation are defined with respect to
the steadiness of the feature.
5 PALMPRINT EXTRACTION
AND MATCHING
5.1 Region of Interest (ROI) Extraction
The palmprint analysis starts with determining an
image section, where the principal palm lines should
be analyzed (Tóth, 2020). A square ROI is chosen in
the proposed method, as two points (𝑃
,𝑃
) are
sufficient for the determination of the whole square.
The remaining two points calculated from 𝑃
,𝑃
points are 𝑃
,𝑃
marked on Fig. 8.
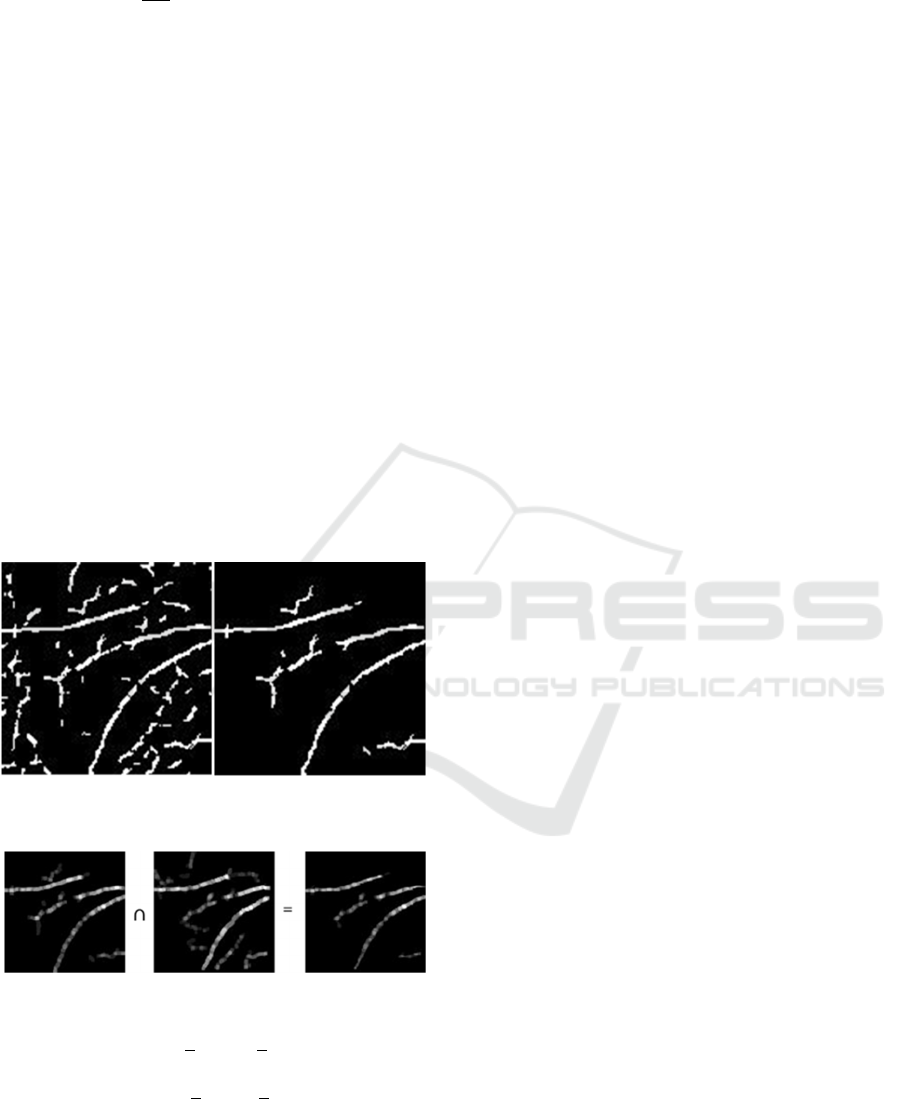
Figure 9: A binary image of extracted palm line before and
after additional noise removal.
Figure 10: Dilated palm line images and the intersection.
𝑷
𝟏
𝑥
–
𝑑
4
,𝑥
𝑑
2
(5)
𝑷
𝟐
𝑥
𝑑
4
,𝑥
𝑑
2
(6)
𝑷
𝟑
𝑥
𝑏,𝑦
𝑎
(7)
𝑷
𝟒
𝑥
𝑏,𝑦
𝑎
(8)
On Fig. 8 the 𝑃
, 𝑃
, 𝑃
are the points of finger
valleys, and 𝑑 the vertical distance between the 𝑃
and 𝑃
valleys.
5.2 Palmline Extraction
The palmline extraction method is highly inspired by
the (Bruno, 2014) study. After the extraction of the
ROI image section on the original image, the palm
image is downsized to 128∙128 size, the method
described below produces best results on small
resolution image. The process is followed by gray
scaling, contrast stretch and smoothing. Averaging
filters are applied on the processed image with 4
different averaging filters with a mask size of 5∙5. The
different averaging filters smooth the palm lines in
different directions, which are vertical, horizontal and
two diagonal directions (Lin, 2016). On the resulting
images a bottom hat filter is applied. The four
resulting images are consolidated into one image by
addition of the partial results (Bruno, 2014). The
process is followed by the elimination of low
intensity pixels, thresholding and noise removal for
the purpose of erasing isolated spikes and blocks
(Bruno, 2014). The method produces satisfying
results, however, a considerable amount of noise was
present on the output images (Fig. 9).
An alternative noise removal method had to be
introduced, which is filtering the blobs in the palm
image by height, width and area (Grycuk, 2014). The
discontinuity of palm lines requests an additional step
which is extending every blob larger than a certain
size with a certain number of pixels. Following this
step, the blobs are filtered by height, width and area.
This method eliminates larger noise objects, which
were not connected to the main palm lines during line
extension. An essential last step is the removal of the
added pixels on the filtered image.
5.3 Palmprint Matching
The result of palm line extracting algorithms were
grayscale images containing the principal lines of the
palm. Template matching is the initial step of palm
image comparison. Points of the two images are
linked based on the similarity of the surrounding
pixels (Yuan, 2011).
The output of template matching is linked pairs of
points containing true matches and mismatches
(Hisham, 2015) (Kertész, 2018). The linked points
are further filtered with RANSAC (Random Sample
Consensus) algorithm. The algorithm creates a
homography matrix based on the inlier pairs of points
(Batyrshin, 2019) (Baráth, 2019).
IMPROVE 2021 - International Conference on Image Processing and Vision Engineering
62
With the use of homography matrix, an affine
transformation is performed on one of the input
images (Yaniv, 2010). With this method the feature
points of one image are projected to the other input.
However, the projected image and the reference
image might not completely overlap, the two images
are dilated and the intersection is computed from the
two. (Fig. 10). The highest intensity image sections
are the most relevant during matching, as these
represent the main principal lines. The pixels which
are taken into consideration are the pixels which
satisfy the following condition:
𝐼𝑚𝑔
𝑥, 𝑦
𝑘 ∙ 𝑀
!
(9)
where 𝑀
!
is the mean intensity value of non-black
pixels and 𝑘 is a free parameter (𝑘 = 1.7 in the
proposed method). The presence of the extracted
pixels on the intersection determines the similarity
level of the two palms.
6 COMBINING HAND
GEOMETRY AND PALMPRINT
The result of the palmprint matching and hand
geometry feature matching are summarized into one
single value considering the quality of the extracted
features (Dubrofsky, 2009). Therefore, different
weights are used for the consolidation of the partial
results.
𝑺 𝟎. 𝟐 𝑯 𝟎. 𝟖 𝑷
(10)
where:
• 𝑆 – total similarity score
• 𝐻 – similarity score of hand geometry features
• 𝑃 – similarity score of palm features
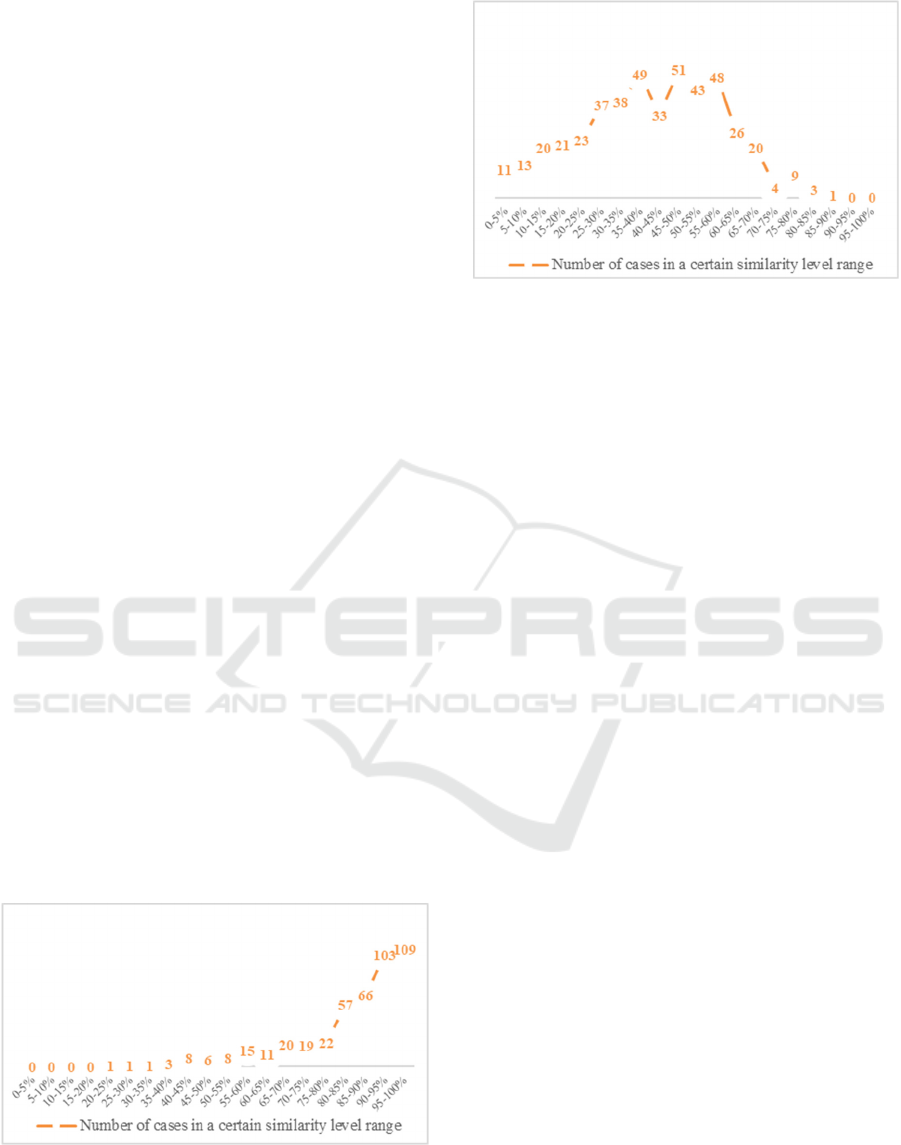
Figure 11: Similarity levels of cases given identical hands.
Figure 12: Similarity levels of cases given different hands.
7 RESULTS
The algorithms were tested on 214 2592∙1944
resolution images of 14 different subjects.
The ages of the subjects vary from 20 to 60, half
of the subjects are females, and the other half are
males. The outcome of keypoint detection was tested
and analyzed manually.
Subsequently, the feature extraction and feature
matching was tested on 450 combinations given
identical hands, and 450 combinations given different
hands.
The results of the algorithm on identical subjects
is shown on Fig. 11, while the results considering
different subjects is shown on Fig. 12.
Considering the distribution of similarity levels
given identical hands, it can be said, that in 75% of
cases the algorithm confirmed an identity of a person
with high confidence. The similarity level in these
cases fell in the 80-100% range. In more than 96% of
differing hand combinations, the method resulted
with a similarity level between 0% to 70%, while in
most cases the similarity level falls in the 30-60%
range. The results suggest, that the algorithm in
majority of different hand cases produces a value very
different compared to identical hands.
This behavior allows us to view the effectiveness
of the proposed method by analyzing FAR (False
Acceptance Rate) and FRR (False Rejection Rate) on
different acceptance thresholds (Ross, 2004). In Fig.
13. the FAR and FRR percentages are displayed
considering a few acceptance thresholds. By defining
68% as the acceptance threshold, FAR (False
Acceptance Rate) is 4.6%, and FRR (False Reject
Rate) is 14,2%.
Biometric Authentication System based on Hand Geometry and Palmprint Features
63

Figure 13: FAR and FRR considering different acceptance
thresholds.
8 CONCLUSION
The method described in the paper provides a simple
solution for a low-cost contact-free authentication
system based on palmprint and hand geometry
features. The implemented method produced
promising outcome and enthuses further
development. A future work for the method is an
improvement of the palm feature matching algorithm,
where the method will use distance transform for
determining the similarity of the palm features
following the affine transformation of one of the palm
images. This improvement would provide a solution,
where the varying intensities of palm lines would
affect the effectiveness of the method to a lesser
extent. A further future work for the method consist
of improving the hand geometry feature matching. In
the future, the method will use a machine learning
algorithm for determining the optimal weights
considered during matching with a machine learning
algorithm. The current method in comparison with
the previously published method (Gulyás Oldal,
2020) is significantly simpler, and therefore less error
prone. The keypoint detection takes place on a
downsized image, which made a significant
difference in the run time of the algorithms.
Furthermore, valley detection consists of independent
simple steps, which proved to have a smaller margin
of error and is much faster. During hand geometry
feature matching, largest inscribed circle area is
considered in replacement of the palm area, as the
determination of the latter consisted of determining
two additional root points of the fingers.
The two points could not be determined with high
confidence, only a rough estimation was made. This
resulted in a deviating palm area in different image
samplings, and made the hand geometry feature
matching less accurate. The method was tested on a
significantly larger data set, which gives a better
overview of the method’s accuracy.
REFERENCES
Laura Gulyás Oldal, András Kovács, "Hand geometry and
palmprint-based authentication using image
processing," 2020 IEEE 18th International Symposium
on Intelligent Systems and Informatics (SISY),
Subotica, Serbia, 2020, pp. 125-130
Alessandro Bruno, Paolino Carminetti, Gentile Vito, Marco
La Cascia, Emanuele Mancino, “Palmprint principal
lines extraction” BIOMS 2014 - 2014 IEEE Workshop
on Biometric Measurements and Systems for Security
and Medical Applications, Proceedings, 2014
Xiangyang Xu, Shengzhou Xu, Lianghai Jin, Enmin Song,
“Characteristic analysis of Otsu threshold and its
applications” Pattern Recognition Letters, Vol. 32.,
2011, pp. 957-960I.
Rafal Grycuk, Marcin Gabryel, Marcin Korytkowski, Rafal
Scherer, and Sviatoslav Voloshynovskiy, “From Single
Image to List of Objects Based on Edge and Blob
Detection”, Lecture Notes in Computer Science, 2014,
pp. 605-615
Ying-Tung Hsiao, Cheng-Long Chuang, Joe-Air Jiang and
Cheng-Chih Chien, "A contour based image
segmentation algorithm using morphological edge
detection," 2005 IEEE International Conference on
Systems, Man and Cybernetics, Waikoloa, HI, 2005, pp.
2962-2967 Vol. 3
Vladimir Maksimović , Branimir Jakšić , Mile Petrović ,
Petar Spalević, Mirko Milošević, “Analysis of Edge
Detection on Compressed Images with Different
Complexities”, Acta Polytechnika Hungarica, Vol. 17,
No. 4, 2020
Ronald L. Graham, “An Efficient Algorithm for
Determining the Convex Hull of a Finite Planar Set”,
Information Processing Letters, Vol 1., 1972, pp. 132-
133
Rutkowski, L., Scherer, R., Korytkowski, M., Pedrycz,
W., Tadeusiewicz, R., Zurada, J.M. Artificial
Intelligence and Soft Computing, ICAISC 2014,
Lecture Notes in Computer Science 2014, vol 8468.
Raul Sanchez-Reillo, Carmen Sanchez-Avila, Ana-
Gonzalez-Marcos, “Biometric Identification through
Hand Geometry Measuerements”, IEEE Transactions
on Pattern Analysis and Machine Intelligence, Vol. 22,
2000, pp. 1168-1171Y.
Miroslav Bača, Petra Grd, Tomislav Fotak, New Trends
and Developments in Biometricsm, Chapter 4: Basic
Principles and Trends in Hand Geometry and Hand
Shape Biometrics, 2012
Ajay Kumar, David C. M. Wong , Helen C. Shen, and Anil
K. Jain, “Personal Verification Using Palmprint and
Hand Geometry Biometric”, Audio- and Video-Based
Biometric Person Authentication, 2003, pp. 668-678
Takumi Ohashi, Zaher Aghbari, Akifumi Makinouchi,
“Hill-Climbing Algorithm for Efficient Color-Based
IMPROVE 2021 - International Conference on Image Processing and Vision Engineering
64

Image Segmentation”, Signal Processing, Pattern
Recognition, and Applications, 2003
Bence Tóth Tamás, Sándor Szénási, “Tree Growth
Simulation based on Ray-Traced Lights Modelling”,
Acta Polytechnika Hungarica, Vol. 17, No. 4, 2020
Lin, Sen & Xu, Tianyang & Yin, Xinyong. Region of
interest extraction for palmprint and palm vein
recognition. 9th International Congress on Image and
Signal Processing, BioMedical Engineering and
Informatics (CISP-BMEI), 2016, 538-542.
Weiqi Yuan,Sen Lin, Haibin Tong, Shudong Liu, “A
Detection Method of Palmprint Principal Lines Based
on Local Minimum Gray Value and Line Following” ,
International Conference on Hand-Based Biometrics,
2011
M. B. Hisham, Shahrul Nizam Yaakob, Raof R. A. A, A.B
A. Nazren, N.M.Wafi, “Template Matching Using Sum
of Squared Difference and Normalized Cross
Correlation”, 2015 IEEE Student Conference on
Research and Development (SCOReD), 2015
Gabor Kertész, Sándor Szénási, Zoltán Vámossy, “Multi-
Directional Image Projections with Fixed Resolution
for Object Matching”, Acta Polytechnika Hungarica,
Vol. 15, No. 2, 2018
Ildar Z. Batyrshin ,“Constructing Correlation Coefficients
from Similarity and Dissimilarity Functions”, Acta
Polytechnika Hungarica, Vol. 16, No. 10, 2019
Baráth Dániel, Matas Jiri, “Gráf-vágás RANSAC”, KÉPAF
2019: Képfeldolgozók és Alakfelismerők Társaságának
12. országos konferenciája, 2019
Ziv Yaniv, Random Sample Consensus (RANSAC)
Algorithm, A Generic Implementation, Imaging
Science and Information Systems (ISIS) Center, Dept.
of Radiology, Georgetown University Medical Center,
Washington, DC, USA, 2010
Elan Dubrofsky, Homography Estimation, A Master’s
Essay Submitted in Partial Fulfillment of the
Requirements for the Degree of Masters of Science in
the Faculty of Graduate Studies, The University of
British Columbia, 2009
A. Ross and A. K. Jain, "Multimodal biometrics: An
overview," 2004 12th European Signal Processing
Conference, Vienna, 2004, pp. 1221-1224.
M. Golfarelli, D. Maio and D. Malton, "On the error-reject
trade-off in biometric verification systems," in IEEE
Transactions on Pattern Analysis and Machine
Intelligence, 1997, vol. 19, no. 7, pp. 786-796
Huda, Syamsul; Yusuf, Enjang Burhanudin: Biometrics in
the Quran Perspective: Definition, History, and
Type. Didaktika Religia, December 2019, pp. 276-298
G.S. Badrinath, Phalguni Gupta: Palmprint based
recognition system using phase-difference information,
Future generation Computer Systems, Vol. 28 No. 1,
January 2012, pp. 287-305
Wei Li, Bob Zhang, Lei Zhang and Jingqi Yan: Principal
Line-Based Alignment Refinement for Palmprint
Recognition, IEEE Transactions on Systems, Man, and
Cybernetics, Part C (Applications and Reviews), Vol.
42, No. 6, November 2012, pp. 1491-1499
De-Shuang Huang, Wei Jia, David Zhang: Palmprint
verification based on principal line, Pattern
recognition, Vol 41. No. 4, April 2008, pp. 1316-132
Biometric Authentication System based on Hand Geometry and Palmprint Features
65
