
Car Drivers Do Not Choose Their Speed in Urban Environments:
Speed Models in Tangent Streets
Yasmany García-Ramírez
a
, Luis Paladines
b
, Christian Verdesoto
c
and Patricio Torres
d
Civil Engineering Department, Universidad Técnica Particular de Loja, San Cayetano Street, Loja, Ecuador
Keywords: GPS Equipment, Roundabout Intersections, Signal-controlled Intersections, Speed Model, Stop-controlled
Intersections, Urban Tangent Streets.
Abstract: The performance-based design approach is one way to deal with speeding in the streets. Under this approach,
the geometric elements of roadways can influence on the desired operating speeds. Thus, several studies have
investigated the relationship between geometric elements and light vehicle speeds; however, no conclusive
results have been reached at this stage. In this context, this article aims to investigate the influence of several
characteristics from urban street tangents, car driver, and vehicle on their speed in free-flow conditions. Three
tangents scenarios were set out: before stop-controlled intersections, before signal-controlled intersections,
and before roundabout intersections. Speeds of light vehicles were measured at 34 streets. Speeds were
collected with in-vehicle GPS equipment. Thirty-five car drivers participated in the study with their vehicles.
Street geometric characteristics, street environment variables, driver and vehicle characteristics were also
collected. As a result, 15 regression models were calibrated and validated. Street length and objects density
were the most influential variables in those models, and not the driver and vehicle characteristics as would
suppose. This comprehensive research extends the knowledge of the most influential variables on speed in
several urban scenarios, offering useful information for urban planners and street designers.
1 INTRODUCTION
Performance-based design is one approach to deal
with speeding in the streets, where the street
geometrics and its environment elements are selected
based on their influence on the desired driving speeds,
especially in tangents. This approach presents a more
active and efficient alternative to reduce speed
vehicles (Fitzpatrick et al., 2003; Harwood et al.,
2000; Ray et al., 2014). The success of this approach
is finding the relationship between driving speeds and
street features. Several studies have developed
operating or free-flow speed models for urban streets
in order to understand this relationship. These
investigations were focused especially on tangents
before stop-controlled intersections and tangents
before roundabout intersections.
In general, five principle parameters influencing
the free flow speed: driver, vehicle, roadway,
environment, traffic operation and control (Sekhar et
a
https://orcid.org/0000-0002-0250-5155
b
https://orcid.org/0000-0002-2070-6946
c
https://orcid.org/0000-0002-9344-9506
d
https://orcid.org/0000-0001-5813-8844
al., 2016). Those variables also may influence
acceleration and deceleration choice. Speed choice is
influenced by driver characteristics, such as
personality traits (García-Ramírez, 2014; Gargoum et
al., 2016; Roidl et al., 2014), driver age (Keay et al.,
2013; Thompson et al., 2012), driver reliability
(Gstaltera and Fastenmeier, 2010), conversation and
texting tasks (Choudhary and Velaga, 2017), gender
and driving experience (Goralzik and Vollrath, 2017),
speeding intention (Dinh and Kubota, 2013b), threat-
related feelings and arousal (Schmidt-Daffy, 2013),
among others (Tarris et al., 1996).
Vehicle characteristics also impact on speed
choice, such as vehicle class (Dhamaniya & Chandra,
2013; Gargoum et al., 2016; Jevtić et al., 2015; Wang,
2006) vehicle age (Gargoum et al., 2016) or vehicle
length (Giles, 2004).
Roadway also influence on speed choice, such as
street length (Dinh and Kubota, 2013a; Wang, 2006),
number of lanes (Dinh and Kubota, 2013a; Eluru et
García-Ramírez, Y., Paladines, L., Verdesoto, C. and Torres, P.
Car Drivers Do Not Choose Their Speed in Urban Environments: Speed Models in Tangent Streets.
DOI: 10.5220/0010435904210428
In Proceedings of the 7th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2021), pages 421-428
ISBN: 978-989-758-513-5
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
421

al., 2013; Wang, 2006), shoulders (Eluru et al., 2013;
Gargoum and El-Basyouny, 2016), longitudinal slope
(Ding et al., 2015), roadway width (Bassani and
Sacchi, 2012; Dinh & Kubota, 2013a), lane width
(Bassani and Sacchi, 2012; Poe and Mason, 2000),
pavement markings (Ding et al., 2015; Guo et al.,
2016), pavement condition (Eluru et al., 2013; Sekhar
et al., 2016; Wang, 2006). In roundabouts, speed
choice were related to entry width (Al-Omari et al.,
2014; Gallelli et al., 2014), internal circle diameter
(Al-Omari et al., 2014; Gallelli et al., 2014), drive
curve (Al-Omari et al., 2014), entry deviation angle
(Al-Omari et al., 2014) and approach/exit speed
(Gallelli et al., 2014).
Street environment impacts on driver speed
choice too, specially sidewalk presence (Dinh &
Kubota, 2013a; Eluru et al., 2013; Wang, 2006),
access density (Wang, 2006), roadside objects density
including trees, utility poles, traffic signs, etc.
(Antonson et al., 2014; Dinh and Kubota, 2013a;
Wang, 2006), parking presence (Eluru et al., 2013;
Gargoum et al., 2016; Wang, 2006), crash barriers
(Antonson et al., 2014), bus stop (Antonson et al.,
2014), adjacent land uses (Galin, 1981; Gargoum et
al., 2016; Giles, 2004; Wang, 2006) or open landscape
and broad road (Antonson et al., 2014). On the other
hand, speeds are also significantly affected by
changes in lighting conditions, such as: sunny, cloudy,
and dark (Bassani et al., 2016; Hjelkrem & Ryeng,
2016) as well as weather conditions (Rahman &
Lownes, 2012). Likewise, the day of the week (Eluru
et al., 2013) or nighttime and daytime (Tarko et al.,
2016) also would affect driver speed choice.
Traffic operation and control could affect speed
choice, for example, speed limits (Gargoum & El-
Basyouny, 2016; Goralzik and Vollrath, 2017), point-
to-point speed enforcement system (Montella et al.,
2015), speed cameras (Schechtman et al., 2016),
speed publicity campaigns (Schagen et al., 2016),
perceived posted speed (Schechtman et al., 2016) or
photo-radar presence (Chen et al., 2000). It should be
mentioned that given the scope of the investigation,
this parameter will not be included in the analysis.
In summary, there is no doubt that driver speed
choice is affected by a range of different attributes of
driver, vehicle, roadway, environment, traffic
operation and control. However, some of those
attributes were not statically significant in all the
studies, for example, lane width (Wang, 2006) or
pavement condition (Bassani and Sacchi, 2012) did
not influence on speed choice; which means that more
research is needed.
In this context, the aim of this research is to
investigate the influence of several characteristics of
urban tangent streets, car driver, and its vehicle on the
driver speed choice in free-flow conditions. Fifteen
regression models were calibrated and validated and
three different scenarios. To show these findings, the
rest of the article is organized as follows. Section 2
gives an overview of the materials and methods. This
section describes the sample size, road test section,
measurement equipment, the selection of car drivers,
and the selection of the test vehicles. Also, this
section details the data collection, data processing,
and speed pattern analysis. Later, the results section
presents the speed model calibration process and its
validation. And the principal conclusions are
highlighted at the end of the article.
2 MATERIALS AND METHODS
2.1 Sample Size
The speed sample size was calculated based on
equation 1 (Pignataro, 1973). This equation includes
several speed percentiles, the speed standard
deviation, a level of confidence and an admissible
error. For this investigation, a standard deviation of
13 km/h was assumed (Bennett, 1994) and an error of
5 km/h.
𝑛
𝐾
∗𝜎
∗
2𝑈
2∗𝑒𝑙
(1)
Where n: simple size, K: constant related to the
confidence level, σ: standard deviation, U: normal
deviation related to the percentile of speed, el:
maximum admissible error. With a level of
confidence of 95% (K = 1.96) and value of U = 1.04
(for the worst-case scenario: 85th percentile speed), a
minimum number of 40 observations are obtained
with that equation. In this study, in just the yellow
signal, that value could not be reached (only 13
observations were collected).
2.2 Road Test Section
Streets for this study were selected based on the
following criteria: a) urban streets, b) tangents before
stop-controlled intersections, tangents before signal-
controlled intersections or tangents before
roundabout intersections, c) longitudinal slope less
than 3%, d) pavement surface in good condition, e)
speed limit of 60 km/h, and f) allow free-flow
condition. Based on those criteria, 34 streets were
selected in Loja city (Ecuador), where 13 streets were
tangents before stop-controlled intersections, 12 were
tangents before signal-controlled intersections, and 9
were tangents before roundabout intersections. In
order to optimize resources, all those streets were part
of a single circuit of 9.8 km.
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
422

Regarding the characteristics of the tangents before
stop-controlled intersections, the length of tangents
before stop-controlled intersections was between 47-
226 m, up to 2 lanes, roadway width between 7 to 9
m, and up to traffic directions. In tangents before
signal-controlled intersections, the length of the
streets was between 94 and 121 m, up to 3 lanes,
roadway width between 7 to 10 m, and up to traffic
directions. In tangents before roundabout inter-
sections, the length of the streets was between 63 and
830 m, up to 3 lanes, the roadway width between 7
and 13 m, the traveled length within the roundabout
was between 17 and 118 m, the internal diameter was
between 11.5 and 25 m, the external diameter was
between 26 and 61 m, the width of entry and exit of
the roundabout was between 7 and 11 m, and the
roadway width inside the circle was between 9 and 14
m.
2.3 Measurement Tool
Video VBOX Lite was selected to collect vehicle
speeds. This device was placed inside the light
vehicle. It allows recording geo-referenced digital
images, its speed, and its height, among others. The
Video VBOX Lite has an accuracy of 0.05% for
distance travelled, 0.2 km/h for speed, and ± 10 m for
height. The device, in movement, receives
information every 0.1 s from 8 satellites. The geo-
referenced digital images helped with the data
analysis. Independent variables, such as street length,
were collecting using traditional measures.
2.4 Driver and Car Selection
Car drivers who participated in this investigation
were selected from a non-probabilistic sampling.
They had to meet the following requirements: a) have
a driver's license, b) have a light vehicle, c) know the
streets of the study, and d) have driven frequently in
the last two months. Based on these restrictions, 23
men and 22 women were chosen. This distribution
was proportional to the last population census in the
country (INEC, 2010). All car drivers had an average
age of 30.5 years (min = 21, max = 60) and driving
experience of 9.3 years (min = 1, max = 40). At the
end of the trip, drivers answered two surveys: MDSI-
S (Taubman-Ben-Ari et al., 2004) and ZKPQ-50-cc
(Aluja et al., 2006) to estimate their personality traits
and driving style, respectively. This information was
used to analyse their influence on their speed choice.
A previous research found a statistical relationship
between maximum speed and certain personality
traits and driving styles on rural roads (García-
Ramírez, 2014).
Vehicles in this research were mostly Chevrolet
and Hyundai (62%). From all vehicle study, 78%
were cars and 22% pickup trucks. Average
manufacturing year was 2008 (min = 1994, max =
2015), average cylinder capacity was 1850 cm
3
(min
= 1000, max = 3700) and average last mechanical
check-up was 52 days (min = 15, max = 140) before
the day of data collection.
2.5 Speed Data Collection
Speeds were collected in good weather conditions,
dry pavement and during daylight. It selected the
weekends and outside of peak hours (2:00 a.m. to
6:00 p.m.) as study time, to ensure that streets were in
a free-flow condition. Video VBOX Lite was
discretely installed in each vehicle, with the
precaution of not interfering with the driving task.
The device has a GPS antenna and a camera. GPS
antenna was placed in the central part of the vehicle
roof and the camera was placed on the front
windshield, facing the street. During the device
installation, the driver was briefly explained about the
circuit and the academic use of the speed data.
2.6 Data Processing
After the collection data, position data, distance
travelled, accumulated distance and speed were
exported every second. Every speed profile, o part of
it, which was not in free-flow condition, was
eliminated. In tangents before stop-controlled
intersections, there were 21 free-flow speed profiles
for every street. In tangents before signal-controlled
intersections there were 67 free-flow speed profiles
when the traffic light was green, 45 in red light and
13 in yellow light. Free-flow speed profiles tangents
before roundabout intersections were 90, while the
free-flow speed profiles within the roundabout were
125. In each street, in its middle, the operating speed
or the 85th percentile speed, mean free-flow speed,
and free-flow speed standard deviation were
calculated, as well as considered in the previous
literature.
At the end of the trip, car drivers were asked to
answer two surveys: ZQPK-50-cc, and MDSI-S. The
ZQPK-50-cc survey has 50 questions related to the
five traits of personality: aggression - hostility,
impulsive sensation seeking, neuroticism - anxiety,
sociability, and activity. MDSI-S survey (41
questions) estimates the driving style that prevails in
the driver: risky and high-velocity style, dissociative
style, angry style, careful and patient styles, anxious
style, or distress reduction style. According to the
Car Drivers Do Not Choose Their Speed in Urban Environments: Speed Models in Tangent Streets
423
results, the majority of the drivers had the following
predominant personality traits: impulsive sensation
seeking (44.4%) and activity (42.2%). Likewise, most
of the drivers were careful and patient style (53.3%)
or risky and high-velocity style (26.7%).
2.7 Pattern Analysis
After data processing, this section analyses the
patterns of the independent variables related to the
speed, in order to detect the most influential variables.
All statistical analyses were performed using the R
program (R Core Team, 2013). In this software, a
linear regression analysis was performed at 95% level
of confidence. The variables statistically significant
from this process will use in the equation calibration
process.
The variables analysed in this process were: street
length (m), roadway width (m), lane width (m), land
use, objects density (n°/100 m), trees density (n°/100
m), access density (n°/100 m), number of lanes, and
parking and sidewalk presence. In tangents before
stop-controlled intersections the street length
influences the operating speed (v
85
), mean free-flow
speed (v
AVG
), free-flow speed standard deviation
(v
SD
). Also, the parking presence affected the v
AVG
.
On the other hand, in the tangents before signal-
controlled intersections, the lane width influences the
v
85
in the green light, and the objects density (n°/100
m) affects the v
85
in the red light. No variable was
statistically significant in the yellow light. In tangents
before roundabouts intersections, the street length
influences the operating speed (v
85
), and the mean
free-flow speed (v
AVG
). Variables related to the driver
and to the vehicle were not statistically significant.
3 RESULTS
Speed model calibration was performed based on the
most influential variables. In this calibration, a linear
regression analysis was performed with a 95% level
of confidence. When there were not any statistically
significant variables, fixed values were assumed.
After the calibration, models were validated with data
in another test circuit, which had similar
characteristics to the initial one. This validation was
carried out by analyzing the prediction errors.
3.1 Models Calibration
It calibrated a linear regression analysis with the
street length (see table 1).
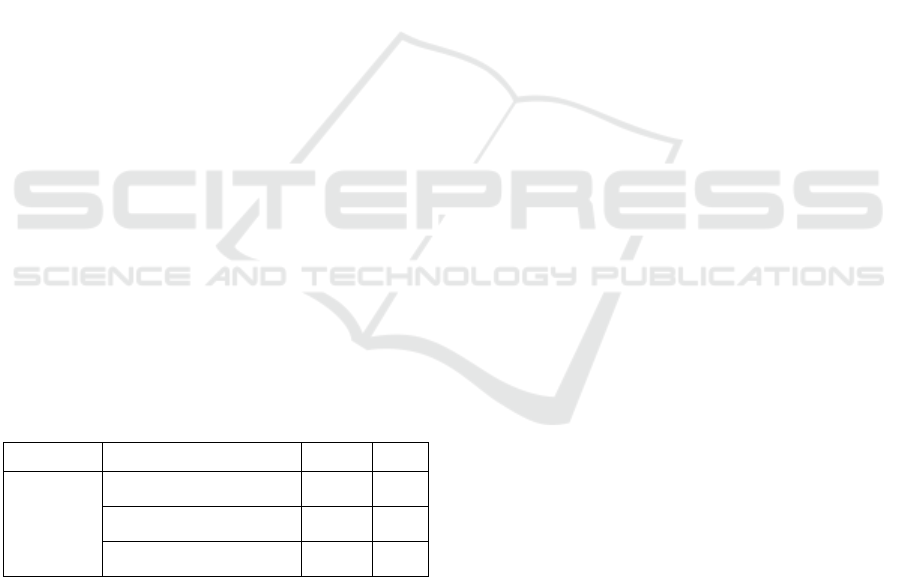
Table 1: Proposed models for tangents before stop-
controlled intersections.
Condition Equation R
2
adj. #
Speed in the
middle of
the tangent
v
85
= 22.4 + 0.114 L
0.94 (2)
v
AVG
= 20.1 + 0.105 L
0.95 (3)
v
SD
= 1.99 + 0.0146 L
0.79 (4)
𝑣
operating speed in km/h, 𝑣
mean free-flow speed in
km/h, 𝑣
free-flow speed standard deviation in km/h, 𝐿
street length between 47 and 226 m, 𝑅
𝑎𝑑𝑗. adjusted
coefficient of determination.
Vehicle speed in table 1 increases with the length
of the street when the driver perceives a long distance
to travel. Conversely, in shorter paths, drivers will
have smaller speeds because they do not have “the
physical space” to do both speed up in the tangent and
speed down before to reach the intersection.
In tangents before signal-controlled intersections
are more complex than the previous tangents because
traffic lights increase driver mental workload. The
calibrated models shown in table 2 are also consistent
with actual driving. In green light, vehicles are slower
than in yellow light, which makes sense, because
many drivers tend to speed up to pass the yellow
traffic light, especially when they are in the dilemma
zone (Bar-Gera et al., 2016).
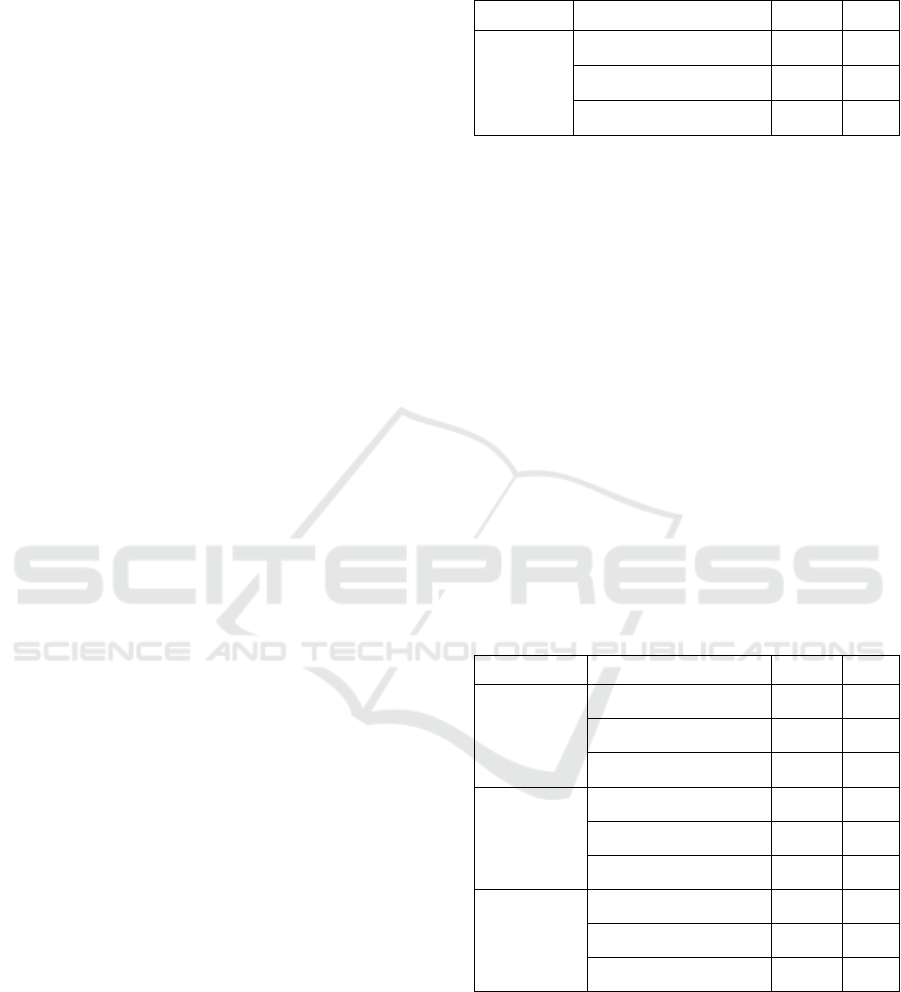
Table 2: Proposed models for tangents before signal-
controlled intersections.
Condition Equation R
2
adj. #
Speed in the
middle of the
tangent in
green light
v
85
= 52.72 km/h
NA (5)
v
AVG
= 43.55 km/h
NA (6)
v
SD
= 4.34 km/h
NA (7)
Speed in the
middle of the
tangent in
yellow light
v
85
= 56.28 km/h
NA (8)
v
AVG
= 43.31 km/h
NA (9)
v
SD
= 9.82 km/h
NA (10)
Speed in the
middle of the
tangent in red
light
v
85
= 33.4+0.53OD
0.49 (11)
v
AVG
= 39.71 km/h
NA (12)
v
SD
= 4.45 km/h
NA (13)
𝑣
operating speed in km/h, 𝑣
mean free-flow speed in
km/h, 𝑣
free-flow speed standard deviation in km/h, 𝐿
street length between 94 and 122 m, 𝑂𝐷 object density
between 5.3 and 29.1 units per each 100 m , 𝑅
𝑎𝑑𝑗. adjusted
coefficient of determination, NA: not available.
In this dilemma zone can also see high-speed data
dispersion because other drivers decelerate with high
rates in order to stop in yellow light. When the light
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
424
is green, drivers have already decided that they will
pass the intersection, so the speed data dispersion is
lower than in yellow light. In the red light, speeds are
lower than the two previous conditions, because
drivers already know that they must stop before the
red light. In this condition, speed data dispersion
should be the lowest.
Models in roundabouts (see in table 3) are
applicable for tangent lengths between 63 to 312 m.
In longer tangents (> 312 m) could be assumed that
drivers have reached their desired speed. In this study,
the average desired speed was 44.80 km/h with a
standard deviation of 5.90 km/h. This average value
is similar to the result of the equation 16, using a street
length value of 312 m (45.46 km/h). This double
check strengthens confidence in the equations
developed.
The speed values from table 3 are higher than those
found in the previous scenarios (stop-controlled and
signal-controlled); because in tangents before
roundabouts, the driver has a less mental workload.
Speed data dispersion is higher than in green light and
the red light cases, as what has been seen in the yellow
light case. This is because roundabout could generate
a dilemma zone, given that the driver may doubt if
he/she continues or stops the vehicle when
approaching vehicles inside the roundabout.
Street geometric and street operation variables
were also analysed inside the roundabouts. However,
there were not any variable statistically significant, so
fixed values were adopted: an average speed of 28.60
km/h and a standard deviation of 4.66 km/h. This
average speed was similar than in previous
investigations: 30 km/h (Bassani & Sacchi, 2011), 17-
26 km/h (Gallelli et al., 2014), as well as its standard
deviation 4.13-5.21 km/h (Gallelli et al., 2014).
Table 3: Proposed models for tangents before roundabouts.
Condition Equation R
2
adj. #
Speed in the
middle of
the tangent
v
85
= 28.3 + 0.091 L 0.98 (14)
v
AVG
= 20.5 + 0.080 L 0.90 (15)
v
SD
= 5.38 km/h NA (16)
𝑣
operating speed in km/h, 𝑣
mean free-flow speed in
km/h, 𝑣
free-flow speed standard deviation in km/h, 𝐿𝑠treet
length between 63 and 312 m, 𝑅
𝑎𝑑𝑗. adjusted coefficient of
determination, NA: not available.
3.2 Models Validation
A validation process was performed to evaluate the
calibrated models from tables 1 to 3. For this
validation, another circuit was collected in the same
city, with similar street characteristics. Information
was collected from 8 streets with a length between 47
m and 112 m for tangents before stop-controlled
intersections, 12 streets with a length between 94 to
120 m for tangents before signal-controlled
intersections, and 6 streets with a length between 66
to 287 m for tangents before the roundabout.
Six car drivers (3 were men and 3 were women)
drove through the validation circuit. The drivers had
an average age of 26.3 years (min = 25, max = 28)
and an average driving experience of 7.2 years (min
= 5, max = 9). Chevrolet or Hyundai brands (67%)
were the vehicles that participated in the calibration
circuit. Cars were 67% and pickup trucks were 33%.
The average manufacturing year was 2007 (min =
2004, max = 2011), the average cylinder capacity was
2000 cm3 (min = 1400, max = 2700), and the average
last mechanical check-up was 53 days before the
collection day (min = 30, max = 90). Both the
measurement equipment and the time data collection
were the same in the initial circuit. Also, the same
data processing from the calibration process was used
for the calibration process.
Prediction errors were calculated in order to
validate the previous calibrated speed models. Those
errors were: mean squared error (MSE), mean
absolute error (MAE), mean absolute percentage
(MAPE), and Chi-square test (see table 4). Table 4
did not include the constant values models because is
not possible to get prediction errors, however, in
those cases, an analysis of variance (ANOVA) was
carried out, comparing values from the constant value
models with the collected values from validation.
And those values should not differ at 95% level of
confidence.
The highest values from table 4 are MSE and
MAE. Those errors are obtained by the model of
operating speed and the mean free-flow speed for the
tangents before roundabouts. When these equations
are used, caution should be taken because prediction
error was around 5 km/h.
The highest values of the MAPE is given by the
equations of the free-flow speed standard deviation,
so caution is also suggested when will be used.
Despite the values of those errors, these equations and
the other is table 4, equations are valid because the
chi-calculated did not pass the chi-critical value.
Regarding to the fixed models, the p-value from
ANOVA is more than the level of significance
(α=0.05), which means that the differences between
the means are not statistically significant, so also
those fixed models are valid.
Car Drivers Do Not Choose Their Speed in Urban Environments: Speed Models in Tangent Streets
425
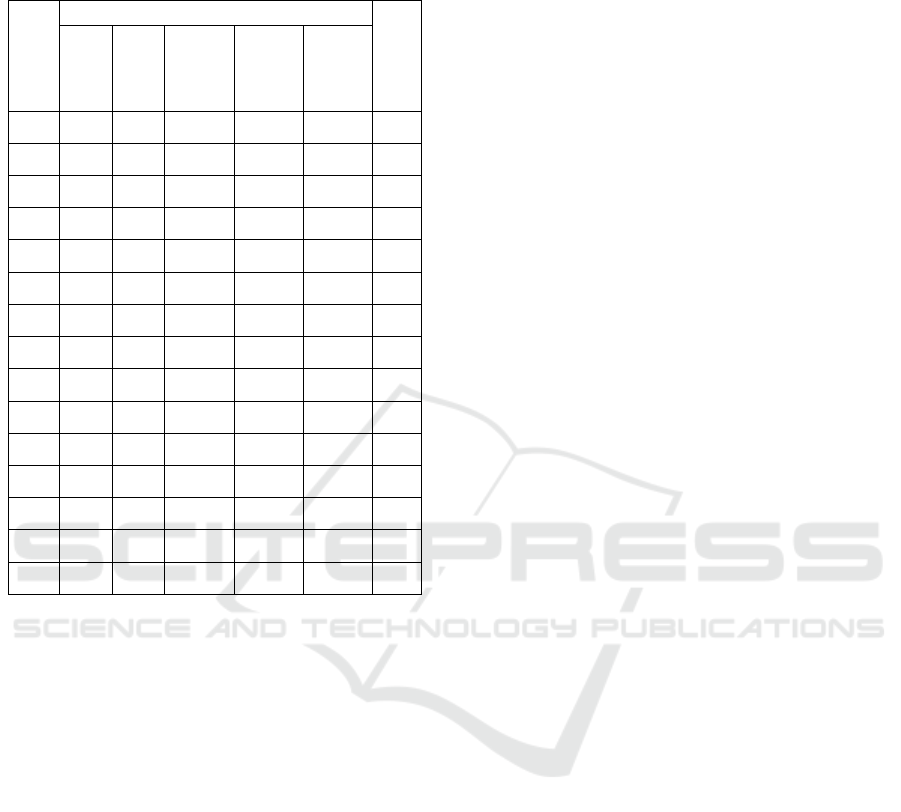
Table 4: Prediction errors and chi-square values for speed,
acceleration, and deceleration equations for the
intersections in this study.
# equation
Prediction errors
p value
(ANOVA)
MSE
(km/h)²
MAE
(km/h)
MAPE
(%)
χ²
calculated
χ²
critic
(2) 3.83 1.27 4.04 0.95 14.07 -
(3) 5.85 2.13 7.69 1.68 14.07 -
(4) 0.82 0.70 22.84 2.11 14.07 -
(5) - - - - - 0.804
(6) - - - - - -
(7) - - - - - -
(8) - - - - - 0.321
(9) - - - - - -
(10) - - - - - -
(11) 8.77 2.44 5.70 1.41 12.59 -
(12) - - - - - 0.245
(13) - - - - - -
(14) 36.79 5.44 11.60 4.54 11.07 -
(15) 26.60 5.11 14.39 4.44 11.07 -
(16) - - - - - 0.560
MSE= mean squared error, MAE=mean absolute error,
MAPE=mean absolute percentage error,χ² calculated =Chi
-square calculated, χ² critic = Chi-square critic. P value:
results from ANOVA. -: Not performed o not possible to
calculate.
It is worth mentioning that a standard deviation of
13 km/h was adopted for the calculation of the sample
size, while the standard deviation in this study was
5.7 km/h. With this standard deviation, the sample
size will be 8 observations, less the minimum used in
this study. So, the sample size of this study has more
than 95% level of confidence.
4 CONCLUSIONS
This article aimed to investigate the influence of
several characteristics from urban street tangents, car
driver, and vehicle on their speed in free-flow
conditions. After analyzing the results, the following
conclusions are presented:
In tangents before stop-controlled intersections,
the street length was the most influential variable on
speed. In tangents before signal-controlled
intersections, object density was the only variable that
influenced the speed in red light. In roundabout
intersection and tangents before the roundabout, the
street length influenced the speed. The average
desired speed in tangents was 44.80 km/h, and the
average speed within the roundabouts was 28.60
km/h. The calibrated and validated models are
consistent with what happens in real driving
condition. Considering this finding, apparently car
drivers do not choose their speed; nevertheless, the
car driver is indirectly influenced by the street length.
If they perceive that the urban street is long they will
speed up, and in short streets, they will do the
opposite or the will keep their initial speed.
This study has several limitations. First, Video
VBOX Lite was used based on the assumption that
this device gives accurate speed data; which should
be studied in the future. Also, all speed models are
valid for speeds in the middle of the tangent, thus,
other points in the street speed profile should be
analyzed. Also, the calibrated speed models are valid
in a specific range, so it should be used in those
ranges. The circuits were located in an Andean city,
which could differ from other cities.
Despite these limitations, the present study helps
to extend the knowledge on urban speeds and their
relationship with street variables, offering useful
information for urban planners and street designers. It
studied three different scenarios and several variables
related to car driver characteristics, vehicle
characteristics, roadway, and street environment. It
showed that the street length is the main variable that
affects the speed in urban tangents and not the
variables related to the vehicle and driver. This
outcome suggests that the government, especially in
developing countries, should put more emphasis on
street infrastructure than on the driver or vehicle.
ACKNOWLEDGEMENTS
The authors acknowledge the support of the National
Secretariat of Higher Education, Science,
Technology and Innovation (SENESCYT) and
Universidad Técnica Particular de Loja from the
Republic of Ecuador.
REFERENCES
Al-Omari, B. H., Ghuzlan, K. A., & Al-helo, L. B. (2014).
Modeling through traffic speed at roundabouts along
urban and suburban street arterials. Journal of the
Transportation Research Forum, 53(2), 7–19. https://
trforum.org/wp-content/uploads/2017/05/2014v53n2_
01_Roundabouts.pdf.
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
426

Aluja, A., Rossier, J., García, F., Angleitner, A., Kuhlman,
M., & Zuckerman., M. (2006). A cross cultural shortened
form of the ZKPQ (ZKPQ-50-cc) adapted to English,
French, German, and Spanish languages. Personality and
Individual Differences, 41(4), 619–628. https://
doi.org/http://dx.doi.org/10.1016/j.paid.2006.03.001.
Antonson, H., Ahlström, C., Mårdh, S., Blomqvist, G., &
Wiklund, M. (2014). Landscape heritage objects’ effect
on driving: A combined driving simulator and
questionnaire study. Accident Analysis and Prevention,
62, 168–177. https://doi.org/10.1016/j.aap.2013.09. 021.
Bar-Gera, H., Musicant, O., Schechtman, E., & Ze’evi, T.
(2016). Quantifying the yellow signal driver behavior
based on naturalistic data from digital enforcement
cameras. Accident Analysis and Prevention, 96, 371–
381. https://doi.org/10.1016/j.aap.2015.03.040.
Bassani, M., Catani, L., Cirillo, C., & Mutani, G. (2016).
Night-time and daytime operating speed distribution in
urban arterials. Transportation Research Part F:
Traffic Psychology and Behaviour, 42, 56–69.
https://doi.org/10.1016/j.trf.2016.06.020.
Bassani, M., & Sacchi, E. (2012). Calibration to local
conditions of geometry-based operating speed models
for urban arterials and collectors. Procedia - Social and
Behavioral Sciences, 53, 821–832. https://doi.
org/10.1016/j.sbspro.2012.09.931.
Bassani, M., & Sacchi, E. (2011). Experimental
investigation into speed perfomance and consistency of
urban roundabouts: an Italian case study. Poster
Session at the “3rd International Conference on
Roundabouts,” May.
Bennett, C. R. (1994). A speed prediction model for rural
two-lane highways (Phd Thesis). Auckland University.
Chen, G., Wilson, J., Meckle, W., & Cooper, P. (2000).
Evaluation of photo radar program in British Columbia.
Accident Analysis & Prevention, 32(4), 517–526.
https://doi.org/https://doi.org/10.1016/S0001-4575(99)
00071-8.
Choudhary, P., & Velaga, N. R. (2017). Mobile phone use
during driving: Effects on speed and effectiveness of
driver compensatory behaviour. Accident Analysis and
Prevention, 106(June), 370–378. https://doi.org/10.1016
/j.aap.2017.06.021.
Dhamaniya, A., & Chandra, S. (2013). Speed Prediction
Models for Urban Arterials Under Mixed Traffic
Conditions. Procedia - Social and Behavioral Sciences,
104(Hcm 2010), 342–351. https://doi.org/10.
1016/j.sbspro.2013.11.127.
Ding, H., Zhao, X., Rong, J., & Ma, J. (2015). Experimental
research on the effectiveness and adaptability of speed
reduction markings in downhill sections on urban
roads: A driving simulation study. Accident Analysis
and Prevention, 75, 119–127. https://doi.org/10.101
6/j.aap.2014.11.018.
Dinh, D. D., & Kubota, H. (2013a). Profile-speed data-
based models to estimate operating speeds for urban
residential streets with a 30km/h speed limit. IATSS
Research, 36(2), 115–122. https://doi.org/
10.1016/j.iatssr.2012.06.001.
Dinh, D. D., & Kubota, H. (2013b). Speeding behavior on
urban residential streets with a 30km/h speed limit
under the framework of the theory of planned behavior.
TransportPolicy, 29, 199–208. https://doi.org/
http://dx.doi.org/10.1016/j.tranpol.2013.06.003.
Eluru, N., Chakour, V., Chamberlain, M., & Miranda-
Moreno, L. F. (2013). Modeling vehicle operating
speed on urban roads in Montreal: A panel mixed
ordered probit fractional split model. Accident Analysis
and Prevention, 59, 125–134.
https://doi.org/10.1016/j.aap.2013.05.016.
Fitzpatrick, K., Carlson, P., Brewer, M., Wooldridge, M.,
& Miaou, S. (2003). NCHRP Report 504: Design
Speed, Operating Speed, and Posted Speed Practices.
http://onlinepubs.trb.org/onlinepubs/nchrp/nchrp_rpt_
504.pdf.
Galin, D. (1981). Speeds on two-lane rural roads-a multiple
regression analysis. Traffic Engeniering Control, 22.
Gallelli, V., Vaiana, R., & Iuele, T. (2014). Comparison
between simulated and experimental crossing speed
profiles on roundabout with different geometric
features. Procedia - Social and Behavioral Sciences,
111, 117–126. https://doi.org/10.1016/j.sbspro.2014
.01.044.
García-Ramírez, Y. (2014). Aceleraciones y desacele-
raciones de vehículos livianos en caminos de montaña
(Doctoral disertation) [Universidad Nacional de San
Juan]. http://repositorio.educacionsuperior. gob.ec/
Gargoum, S. A., & El-Basyouny, K. (2016). Exploring the
association between speed and safety: A path analysis
approach. Accident Analysis and Prevention, 93, 32–
40. https://doi.org/10.1016/j.aap.2016.04.029.
Gargoum, S. A., El-Basyouny, K., & Kim, A. (2016).
Towards setting credible speed limits: Identifying
factors that affect driver compliance on urban roads.
Accident Analysis and Prevention, 95, 138–148.
https://doi.org/10.1016/j.aap.2016.07.001.
Giles, M. J. (2004). Driver speed compliance in Western
Australia: a multivariate analysis. Transport Policy,
11(3), 227–235. https://doi.org/https://doi.org/
10.1016/j.tranpol.2003.11.002.
Goralzik, A., & Vollrath, M. (2017). The effects of road,
driver, and passenger presence on drivers’ choice of
speed: a driving simulator study. Transportation
Research Procedia, 25, 2061–2075.
https://doi.org/10.1016/j.trpro.2017.05.400.
Gstaltera, H., & Fastenmeier, W. (2010). Reliability of
drivers in urban intersections. Accident Analysis &
Prevention
, 42(1), 225–234.
Guo, Y., Liu, P., Liang, Q., & Wang, W. (2016). Effects of
parallelogram-shaped pavement markings on vehicle
speed and safety of pedestrian crosswalks on urban
roads in China. Accident Analysis and Prevention, 95,
438–447. https://doi.org/10.1016/j.aap.2015.07.001.
Harwood, D. W., Neuman, T. R., & Leisch, J. P. (2000).
Summary of design speed, operating speed, and design
consistency issues. Transportation Research Record:
Journal of Transportation Research Board, 1701, 116–
120. https://doi.org/http://dx.doi.org/10.3141/1701-15.
Hjelkrem, O. A., & Ryeng, E. O. (2016). Chosen risk level
during car-following in adverse weather conditions.
Car Drivers Do Not Choose Their Speed in Urban Environments: Speed Models in Tangent Streets
427

Accident Analysis and Prevention, 95, 227–235.
https://doi.org/10.1016/j.aap.2016.07.006.
INEC. (2010). Resultados del Censo 2010 de la población
y vivienda del Ecuador. Fascículo provincial Loja.
http://www.ecuadorencifras.gob.ec//wp-content/descar
gas/Manu-lateral/Resultados-provinciales/loja.pdf.
Jevtić, V., Vujanić, M., Lipovac, K., Jovanović, D., &
Pešić, D. (2015). The relationship between the
travelling speed and motorcycle styles in urban settings:
A case study in Belgrade. Accident Analysis and
Prevention, 75, 77–85. https://doi.org/10.1016/
j.aap.2014.11.011.
Keay, L., Munoz, B., Duncan, D. D., Hahn, D., Baldwin,
K., Turano, K. A., Munro, C. A., Bandeen-Roche, K.,
& West, S. K. (2013). Older drivers and rapid
deceleration events: Salisbury Eye Evaluation Driving
Study. Accident Analysis and Prevention, 58, 279–285.
https://doi.org/10.1016/j.aap.2012.06.002.
Montella, A., Imbriani, L. L., Marzano, V., & Mauriello, F.
(2015). Effects on speed and safety of point-to-point
speed enforcement systems: Evaluation on the urban
motorway A56 Tangenziale di Napoli. Accident
Analysis and Prevention, 75, 164–178.
https://doi.org/10.1016/j.aap.2014.11.022.
Pignataro, L. J. (1973). Traffic Engineering - Theory and
Practice. Prentice-Hall Publishing Co.
Poe, C., & Mason, J. (2000). Analyzing influence of
geometric design on operating speeds along low-speed
urban streets: mixed-model approach. Transportation
Research Record, 1737, 18–24. https://doi.org/
http://dx.doi.org/10.3141/1737-03.
R Core Team. (2013). R: A language and environment for
statistical computing. R Foundation for Statistical
Computing. http://www.r-project.org/
Rahman, A., & Lownes, N. E. (2012). Analysis of rainfall
impacts on platooned vehicle spacing and speed.
Transportation Research Part F: Traffic Psychology
and Behaviour, 15(4), 395–403. https://doi.org/
10.1016/j.trf.2012.03.004.
Ray, B., Ferguson, E., Knudsen, J., Porter, R., & Mason, J.
(2014). NCHRP Report 785: Performance-Based
Analysis of Geometric Design of Highways and
Streetsof Highways and Streets. https://doi.org/10.
17226/22285.
Roidl, E., Frehse, B., & Höger, R. (2014). Emotional states
of drivers and the impact on speed, acceleration and
traffic violations - A simulator study. Accident Analysis
and Prevention, 70, 282–292. https://doi.org/10.1016/j.
aap.2014.04.010.
Schagen, I. Van, Commandeur, J. J. F., Goldenbeld, C., &
Stipdonk, H. (2016). Monitoring speed before and
during a speed publicity campaign. Accident Analysis
and Prevention, 97, 326–334. https://doi.org/10.1016
/j.aap.2016.06.018.
Schechtman, E., Bar-Gera, H., & Musicant, O. (2016).
Driver views on speed and enforcement. Accident
Analysis and Prevention, 89, 9–21. https://doi.org/
10.1016/j.aap.2015.12.028.
Schmidt-Daffy, M. (2013). Fear and anxiety while driving:
Differential impact of task demands, speed and
motivation. Transportation Research Part F: Traffic
Psychology and Behaviour, 16, 14–28. https://
doi.org/10.1016/j.trf.2012.07.002.
Sekhar, C. R., Nataraju, J., Velmurugan, S., Kumar, P., &
Sitaramanjaneyulu, K. (2016). Free Flow Speed
Analysis of Two Lane Inter Urban Highways.
Transportation Research Procedia, 17(December
2014), 664–673. https://doi.org/10.1016/j.trpro.2016.
11.121.
Tarko, A., Hall, T., Romero, M., & Jiménez, C. G. L.
(2016). Evaluating the rollover propensity of trucks - A
roundabout example. Accident Analysis and
Prevention, 91, 127–134. https://doi.org/10.1016/j.aap.
2016.02.032.
Tarris, J., Poe, C., Mason, J., & Goulias, K. (1996).
Predicting operating speeds on low-speed urban streets:
Regression and panel analysis approaches.
Transportation Research Record, 1523, 46–54.
https://doi.org/http://dx.doi.org/10.3141/1523-06.
Taubman-Ben-Ari, O., Mikulincer, M., & Gillath, O.
(2004). The multidimensional driving style inventory—
scale construct and validation. Accident Analysis and
Prevention, 36(3), 323–332. https://doi.org/ https://doi.
org/10.1016/S0001-4575(03)00010-1.
Thompson, K. R., Johnson, A. M., Emerson, J. L., Dawson,
J. D., Boer, E. R., & Rizzo, M. (2012). Distracted
driving in elderly and middle-aged drivers. Accident
Analysis and Prevention, 45, 711–717. https://doi.org/
10.1016/j.aap.2011.09.040.
Wang, J. (2006). Operating speed models for low speed
urban environments based on in-vehicle GPS data (Phd
Thesis) (Issue May) [Georgia Institute of Technology].
https://smartech.gatech.edu/bitstream/handle/1853/105
08/wang_jun_200605_phd.pdf.
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
428
