
A Self-organising System Combining Self-adaptive Traffic Control and
Urban Platooning: A Concept for Autonomous Driving
Heiko Hamann
2
, Julian Schwarzat
2
, Ingo Thomsen
1
and Sven Tomforde
1
1
Intelligent Systems, Christian-Albrechts-Universit
¨
at zu Kiel, 24118 Kiel, Germany
2
Institute of Computer Engineering, University of L
¨
ubeck, Ratzeburger Allee 160, 23562 L
¨
ubeck, Germany
Keywords:
Platooning, Progressive Signal Systems, Self-organisation, Swarm Coordination, Traffic Control.
Abstract:
Platooning is an approach to coordinate the driving behaviour of vehicles on major roads such as motorways.
The aim is to take advantage of, e.g., slipstream effects to reduce cost. We present an approach to transfer
the platooning concept to urban road networks of cities. The reduced slipstream effect is compensated by
integration with the signalisation infrastructure to dynamically allow for prioritisation of platoons using pro-
gressive signal systems (i.e., “green waves”). We define the scenario and derive a research road map towards
fully self-organised platoon operations and integrated coordination with self-adaptive and self-organising ur-
ban traffic control systems. Starting from both directions, that is, self-organised urban platooning as well
as self-organised progressive signal systems in urban road networks, we define the scenario, identify main
challenges, and present first results to demonstrate the feasibility of our research agenda.
1 INTRODUCTION
The field of self-adaptive and self-organising (SASO)
systems, as an umbrella for initiatives such as Au-
tonomic Computing (Kephart and Chess, 2003),
Organic Computing (M
¨
uller-Schloer and Tomforde,
2017) or Interwoven Systems (Tomforde et al., 2014),
aims at developing mechanisms to counter complex-
ity in control problems of technical systems. The vi-
sion is to distribute decision-making about appropri-
ate behaviour to a set of autonomous entities that co-
operate with each other based on current goals and
demands. Compared to standard system design and
operation, the advantage is a more robust and more ef-
ficient solution while simultaneously countering chal-
lenges such as single-point-of-failure, limited scala-
bility, or decreased administrability.
Traffic operation is an ideal environment for
SASO technology. Individual cars can already oper-
ate fully autonomously, the control problem of inter-
sections has typically a limited scope, and the urban
road network can be tremendously large, which turns
centrally optimised dynamic planning infeasible. As
a result, a variety of SASO-based traffic control and
management systems have been proposed in the last
decades (Rehena and Janssen, 2018). These systems
mostly consider the current state-of-the-art in traffic
operation and neglect trends towards green and au-
tonomous driving. Alternatives to the combustion en-
gine (electric, hydrogen) may pave the path towards
more efficiency-focused, green solutions. However,
whether our growing cities will be able to withstand
and whether society will continue to tolerate individ-
ual traffic in cities is questionable. Platooning and its
consideration in urban traffic control may serve as a
compromise between individual and public transport
with good user acceptance.
Until now, swarm behaviour (Hamann, 2018) to
enable platooning and (centralised or decentralised)
infrastructure-based control have been considered
only in isolation. We propose a concept for an inte-
grated solution that tightly couples self-organised pla-
tooning with maintenance and decentralised SASO-
based traffic control. Such an integrated approach has
to balance the potentially conflicting goals of differ-
ent stakeholders. For instance, a classic urban traffic
planning perspective focuses on reducing travel times,
number of stops, emissions, as well as on strong ca-
pacity utilisation. On the other hand, platooning is
advantageous for individual cars when being coor-
dinated and accordingly prioritised to decrease their
expected travel times. This allows, in turn, traffic
authorities to increase the efficiency of public trans-
portation through urban platooning.
Based on an initial discussion of platooning con-
cepts in Section 2, this paper defines in Section 3 such
Hamann, H., Schwarzat, J., Thomsen, I. and Tomforde, S.
A Self-organising System Combining Self-adaptive Traffic Control and Urban Platooning: A Concept for Autonomous Driving.
DOI: 10.5220/0010436304290437
In Proceedings of the 7th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2021), pages 429-437
ISBN: 978-989-758-513-5
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
429

Figure 1: Example of a platoon on a highway simulated in
PLEXE/SUMO.
an integrated platoon-based urban traffic control ap-
proach. We then outline a research road map in Sec-
tion 4 and describe preliminary results in Section 5.
Finally, in Section 6 we summarise the paper and give
an outlook to our future work.
2 PLATOONING
2.1 Term Definition
Shladover (Shladover, 2007) defined platooning as
“spontaneous and dynamic forming of convoys of ve-
hicles, so-called platoons.” This is based on the idea
that each participating vehicle drives within short dis-
tance to its neighbours (see Fig. 1). The concept has
gained increasing attraction due to the recent develop-
ments in autonomous driving since manual steering
is typically not an option for optimising the benefits
of platoons (Bergenhem et al., 2012). In turn, vehi-
cles need to act autonomously or at least support the
driver. Conceptually, even an individual vehicle may
be considered as a platoon but the benefits (such as
reduced energy consumption due to slipstream effects
or better utilisation of the infrastructure due to min-
imised distances) increase with the platoon size.
Traditional platooning scenarios are situated at
highways and motorways: Halle and Chaibdraa
define the concept of platooning as “[. . . ] ve-
hicles travel[ling] on highways in closely spaced
groups.” (Hall
´
e and Chaib-draa, 2005). Here, ded-
icated access and exit roads (typically at large dis-
tances in kilometre-scale), sometimes combined with
several lanes, allows for static composition of pla-
toons. The shorter the coordination time of vehi-
cles and the higher the fluctuation (e.g., due to re-
organisation of the platoon), the lower is the possi-
ble benefit for participants (Shladover, 2007). The
challenge in urban traffic would be to quickly and
dynamically form and re-configure platoons while
still achieving benefits in terms of reduced overall
organisational effort, increased safety, and possibly
saved fuel. Table 1 offers more details about the-
ses challenges while comparing traditional highway-
based platooning to novel urban platooning systems.
2.2 State of the Art in Platooning
The platooning technology dates back to the 1980s.
Current approaches mainly consider the coordination
of truck platooning due to, for example, the poten-
tially longer duration of the coordination and possible
savings in salaries. Additionally, researchers recently
focus on the efficient assignment of vehicles to pla-
toons, while mostly neglecting individual constraints
and behaviour of participating drivers. For instance,
group and individual benefits need to be balanced as
a vehicle leading a platoon does not save fuel. So,
from an individual perspective, drivers might try to
avoid this position. Consequently, in contrast to exist-
ing approaches (see (Bhoopalam et al., 2018) for an
overview), personal preferences of drivers and indi-
vidual decisions about which platoon to join must be
considered. To demonstrate the feasibility, a platoon-
ing coordination test environment exists (Krupitzer
et al., 2019), which is based on the PLEXE platooning
simulation (Segata et al., 2014). A recent overview of
platooning is given by Kalbitz (Kalbitz, 2017).
One of the first platooning projects was the PATH
programme (Shladover, 2007): All vehicles are self-
driven and have the same role. Platoons make use of
dedicated lanes and longitudinal control is achieved
by following magnetic nails in the street. In contrast,
the SARTRE project (Bergenhem et al., 2012) con-
siders platooning on existing public roads without al-
tering the infrastructure. A leading truck or bus is
steered by a trained driver, which is then followed
by autonomously driven vehicles. An additional re-
mote system guides novel drivers to the nearest pla-
toon with a suitable destination.
Another ‘Intelligent Transportation System’ (ITS)
that forgoes a modified infrastructure is En-
ergy ITS (Tsugawa et al., 2011). It employs on-
board equipment: dedicated short-range communica-
tions between vehicles as well as lidar for gap mea-
surement, which is also used in combination with
radar for obstacle detection. Only fully automated
trucks were upgraded, resulting in 14% fuel reduc-
tion.
Also focusing only on trucks, the EU project
COMPANION (Eilers et al., 2015) aims at dynamic
platooning. It uses on-board systems for coordinated
platooning along with an off-board platform for the
coordination of established platoons. The project is
supported by large car manufacturers.
Heinovski and Dressler formulate platooning as
an optimisation problem (Heinovski and Dressler,
2018). In simulations, the decentralised approach
(with less knowledge) yields on average larger pla-
toons (2.47 cars) than their centralised variant. How-
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
430

Table 1: Challenges in platooning; comparison between highways and cities (urban platooning).
challenge on highways in cities
saving gas major advantage due to slipstream minor influence of slipstream due to
low speeds but platoon-wise synchro-
nised traffic lights
safety reduced lane switching reduced dangers for non-car traffic
traffic diversity diverse due to less significant speed
limits
reduced due to strict speed limits
benefits of switching depends on traffic diversity more potential benefits due to waiting
times at traffic lights
benefits for infrastructure increased throughput in number of ve-
hicles
prioritisation of throughput traffic to
increase capacity utilisation
ever, both approaches need significant time to form a
platoon. Concerning time-efficiency, the distributed
solution is slightly worse than the centralised variant.
2.3 State of the Art in Urban Platooning
As shown by Gershenson in the context of self-
organising traffic lights (SOTL) (Gershenson and
Rosenblueth, 2012), platoons may emerge automat-
ically in urban road networks. In multi-agent simu-
lations based on a toroidal traffic grid, applying sim-
ple rules without direct communication can reduce the
average waiting times at red lights and the number of
stopped cars. The request control of the SOTL holds
a counter for the waiting cars. When a sufficient num-
ber is reached, the lights turn green, which creates
platoons of cars. However, this result is limited to
toroidal traffic grids with regular topologies, such as
Manhattan-style networks. A transfer to a real-world
road network topology is pending. We propose to
study such emerging properties as part of our research
roadmap using appropriate experiment platforms.
2.4 Experimental Platforms
Many platforms for simulation aspects of platoon-
ing exist in both forms, commercial as well as open-
source, and are used in the context of road traffic sim-
ulation. However, none of them currently allows for
an integrated investigation of platooning and urban
traffic control behaviour. A fairly recent open-source
development with a scalable client-server architecture
is the autonomous driving simulator CARLA.
1
It has
a feature for cooperation (“co-simulations”) with the
Simulation of Urban MObility (SUMO),
2
which is an-
other open-source project, developed by the German
Aerospace Centre. The software is well maintained as
indicated by frequent updates. An active community
1
http://carla.org/
2
https://www.eclipse.org/sumo/
exists, providing well-documented projects and tuto-
rials. Vehicles in Network Simulation (Veins)
3
is an
open-source framework for Inter-Vehicular Commu-
nication (IVC). It is composed of SUMO and the pow-
erful event-based network simulator (OMNeT++).
4
For a realistic simulation of platooning, it can be
combined with the Platooning Extension for Veins
(PLEXE),
5
presented by Segata et al. (Segata et al.,
2014). As for commercial modelling and simula-
tion software, Simulink (The MathWorks, 2019) can
also be used in conjunction with PLEXE. Finally, the
commercial solution, Aimsun Next (Aimsun SLU,
2020),
6
can simulate various vehicles and pedestrians
in models of varying granularity, ranging from single
intersections up to entire urban regions.
3 SCENARIO AND VISION
In this section, we specify the envisioned scenario we
want to study. For certain aspects (e.g., centralised vs.
decentralised), we allow spectra of possibilities while
we exclude other aspects (e.g., privacy) that we keep
aside to focus on despite their importance.
Communication. We assume that all cars establish
a car2car network with scalable local communica-
tion. A (large) fraction of autonomous vehicles is con-
nected to the smart city’s infrastructure via communi-
cation links to receive information and commands.
Autonomy and Cooperation. Traffic light con-
troller (TLC) determine the green-light duration at
intersections and their distributed coordination. The
coordination in progressive signal systems (PSS, so-
called ‘green waves’) is done by identifying the
3
https://veins.car2x.org/
4
https://omnetpp.org/
5
http://plexe.car2x.org/
6
https://www.aimsun.com/
A Self-organising System Combining Self-adaptive Traffic Control and Urban Platooning: A Concept for Autonomous Driving
431
!
!
!
!
<platoon>)
<ID)=)x>)
<Destination)=)z>)
<Size)=)a>)
<Speed)=)b>)
<Status)=)c>)
<priority)=)d>)
</platoon>)
<coordination>
)
<ID)=)x>
)
<Offset)=)y>
)
<Begin)=)z>
)
<)
synchron
isedPhase)
=)a>
)
<platoon)=)a>
)
</coordination>
)
_)_)_)_)_)_)_)_)_)_)_)_)_)_)_)
_)_)_)_)_)_))
_)_)_)_)_)_)_)_)_)_)_)_)_)_)
_)_)_)_)_)_)_))
_)_)_)_)_)_)_)_)_)_)_)_)_)_)
_)_)_)_)_)_)_))
_)_)_)_)_)_)_)_)_)_)_)_)_)_)
_)_)_)_)_)_)_))
_)_)_)_)_)_)_)_)_)_)_)_)_)_)
_)_)_)_)_)_)_))
_)_)_)_)_)_)_)_)_)_)_)_)_)_)
_)_)_)_)_)_)_))
_)_)_)_)_)_)_)_)_)_)_)_)_)_)
_)_)_)_)_)_)_))
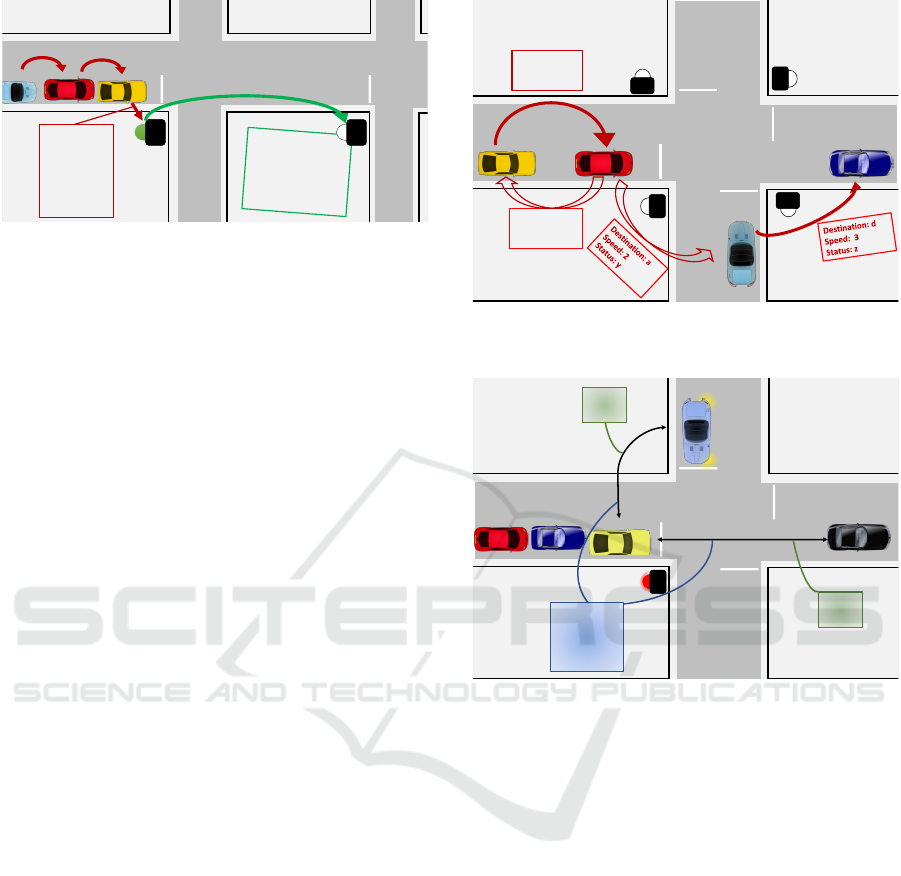
Figure 2: Platoon-responsive coordination of traffic lights
to establish progressive signal systems.
strongest streams and/or platoons, followed by self-
organised coordination of the underlying phases at
distributed intersections (Tomforde et al., 2008). If
an autonomous car (independent of whether part of
a platoon) receives a command from the infrastruc-
ture (e.g., ‘use Lane A’ or ‘leave Lane B’), it directly
follows these commands (see Fig. 2). So we neglect
the possible intervention of users and the possibil-
ity to ignore commands at this preliminary stage of
the concept. At later stages, we plan to investigate
the impact of non-cooperative behaviours on system
performance. Initially, all cars are considered to be
fully cooperative. They voluntarily participate in the
platooning system, and they compromise to optimise
common benefits. However, they are individually mo-
tivated allowing them to switch between platoons or
leave them if the benefit is reduced.
Control Level. The infrastructure-based traffic con-
trol is done using a centralised or a decentralised ap-
proach. We may also allow the combination of both,
therefore forming a hybrid approach. Following the
centralised approach, the system generates traffic or-
ganisation plans for whole sub-networks. Following
the decentralised approach, the system is composed
of autonomous intersection controllers. Similarly, we
study a centralised and a decentralised approach to
platooning.
Urban Platooning. By default, we assume that in-
dividual driving cars try to join either an existing pla-
toon or another single car (see Fig. 3). Once a car
has joined a platoon, it continues to monitor potential
benefits based on current alternative platoons includ-
ing the option of driving alone. Within a platoon, the
participants need to negotiate the trajectory (destina-
tion and route), their preferred speed, and positions
within the platoon (e.g., alternating leaders). We as-
sume a particularly increased need to reorganise pla-
toons dynamically due to the urban traffic environ-
ment in comparison to classical platooning on high-
Destination: a
Speed: 2
Status: y
Destination: a
Speed: 3
Status: x
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
_ _ _
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
_ _ _ _
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
_ _ _ _
Figure 3: Possible communication of an ad-hoc network to
establish urban platoons.
!
!
!
!
!
request'
to'join'
<platoon>'
<platoon'size>'
<destination>'
<average'speed>'
</platoon>'
_'_'_'_'_'_'_'_'_'_'_'_'_'_'_'_'_'_'
_'_'_''
_'_'_'_'_'_'_'_'_'_'_'_'_'_'_'_'_'
_'_'_'_''
_'_'_'_'_'_'_'_'_'_'_'_'_'_'_'_'_'
_'_'_'_''
_'_'_'_'_'_'_'_'_'_'_'_'_'_'_'_'_'
_'_'_'_''
!
request'
to'join'
!
Figure 4: Display of the increased diversity of situations in
urban platooning, the black car may consider to slow down
or even stop to join the platoon, the left-turning light-blue
car may choose to join coming from a different rout.
ways. Human drivers in an urban setting are more
likely to switch to manual driving and to change the
destination or other user-defined constraints. Further-
more, we assume an increase of diversity and uncer-
tainties compared to platooning in highway scenar-
ios (see Fig. 4) because of the more complex road
network and the more diverse traffic (e.g., vulnerable
road users).
Prioritisation. The SOTL has awareness of the pla-
toons and may allow them priority over other road
users (i.e., synchronisation of corresponding phases
using PSS). Even dedicated lanes for platoons can be
considered (or shared bus lanes). Prioritisation is re-
quired in the case of conflicting platoons and/or the
trajectory planning in the network with an impact on
both the centralised and decentralised approach.
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
432

Traffic Generation. The destinations of cars are
known to the infrastructure and other cars, and
they can be modelled dynamically (i.e., as random-
waypoint model for inner-city traffic) and as an
origin-destination matrix for passing traffic (i.e., de-
fined as streams). Route choice is modelled stochas-
tically (i.e., as shortest path, fast route, main street, or
individual route).
Privacy. We exclude privacy aspects and allow the
sharing of information about destination, speed, etc.
4 CHALLENGES AND
OBJECTIVES
The scenario specified above introduces several chal-
lenges to the operation of urban traffic systems and
the coordination of autonomous vehicles. In this sec-
tion, we derive the most urgent challenges from the
overall problem statement to provide a basis for the
subsequent investigations.
4.1 Problem Statement
We propose a research track that studies the poten-
tial benefit of urban platooning supported by and in-
tegrated with SOTL. Methods that need to be devel-
oped can be adjusted in two main qualitative dimen-
sions: (1) Are platoons formed and coordinated by
SOTL or by the cars themselves with SOTL influenc-
ing them almost only as a side effect? (2) Is the whole
system organised centrally or are platooning and/or
SOTL coordinated in a decentralised approach? For
dimension (1), a mixture of responsibilities between
individual cars and SOTL is possible, too. Similar, for
dimension (2), a hybrid approach could allow some
aspects being managed by a decentralised system in
alternation with situation-aware, temporary interven-
tions by centralised coordination.
4.2 Main Research Challenges
Almost all published methods about platooning fo-
cus on the standard application of platoons on high-
ways. Organising platoons within cities comes with
different requirements, new methods need to be de-
veloped, and even more so for a decentralised ap-
proach. Similarly, SOTL is usually focused on coor-
dinating individual cars or only loosely coupled flows
of cars (see Table 1 for a comparison). Hence, also
methods of SOTL require changes to operate on pla-
toons or even on mixtures of platoons and individ-
ual cars. Therefore, the main research challenge is
about adapting methods from both fields and integrat-
ing them to achieve a clear benefit in terms of reduced
travel times, improved safety, and reduced emissions.
We can formulate a main research question: “How to
create a self-organising system that combines SOTL
with the decentral organisation of platooning respect-
ing emerging mutual effects?” Given the state of the
art, we do not know all effects that SOTL has on pla-
tooning and how we could provoke constructive coor-
dination between SOTL and platooning to gain added
efficiency. This will most certainly require to adapt
classical SOTL methods to appropriately deal with
platoons instead of individual cars. Furthermore, as-
pects of privacy and user acceptance need to be con-
sidered to assess the feasibility of such an approach.
Specific for the SOTL approach is whether it can
be done centralised or needs to be done decentralised.
A centralised approach would require to plan (opti-
mised) trajectories for platoons through the network
and a platoon-aware progressive signal system. This
may become less feasible as soon as the autonomous
cars can ignore the centralised plan. A new chal-
lenge would be to integrate inner-city platoons with
prioritised public transport and similarly with special-
purpose infrastructure (e.g., bus lanes). A decen-
tralised approach would require to plan trajectories
of homogeneous platoons (e.g., same destination). In
the case of heterogeneous platoons, the split of pla-
toons would be required in certain situations. Over-
all, a key question is whether platoons can be com-
posed dynamically by external self-organisation ro-
bustly and with a clear benefit. For the decentralised
approach, a complementary cornerstone is the ques-
tion of whether it requires scalability for large-scale
city networks with many intersections.
Specific for the platooning approach is whether in-
dividual cars are allowed to switch between platoons
dynamically and whether that is explicitly supported
by SOTL. Appropriate methods need to be developed
for efficient platoon organisation and re-assignments.
However, we should ask whether dynamic platooning
should be substituted by static platoon assignments
in certain situations. We can even ask whether there
are situations when urban platooning is of no good
use. A unique challenge of platooning in cities could
be non-trivial interplays of phases with bursts of car-
to-platoon assignments, followed by periods of re-
duced re-assignments. Appropriate modelling tech-
niques need to be developed to reflect such temporal
asymmetries. Overall, a key question is a balanced
trade-off between centralised control of all platoons
with global information and scalability while achiev-
ing only sub-optimal assignments to platoons.
A Self-organising System Combining Self-adaptive Traffic Control and Urban Platooning: A Concept for Autonomous Driving
433

5 CURRENT STATE OF THE
INVESTIGATIONS
Based on the overall challenges presented above,
we started the investigations from both underly-
ing perspectives: (a) the self-organised adaptation
of infrastructure-based signalisation and coordina-
tion (of traffic lights) behaviour and (b) the self-
organisation of platoons in heterogeneous environ-
ments. In the following sections 5.1 and 5.2, we
present first results of these two directions of research.
5.1 Infrastructure-supported Urban
Platooning
In (Krupitzer et al., 2018), a first vision of how to in-
tegrate urban infrastructure and platoon coordination
at highways has been presented. The main focus is
on the connection between a centralised highway pla-
toon management and intelligent handling of platoons
leaving the highway and entering the city. Compared
to this paper, the autonomy of the individual partic-
ipants is restricted, the coordination problem is han-
dled by centralised planning, and the traffic light co-
ordination is not fully integrated.
The Organic Traffic Control (OTC) system (Proth-
mann et al., 2011) and its extensions serve as a basis
for investigations towards urban platooning. OTC is
a self-organised traffic control system that decides lo-
cally at each intersection about the behaviour of the
underlying intersection controller. Based on the Ob-
server/Controller paradigm (Tomforde et al., 2011),
it is able to adapt the signalisation of traffic lights
to changing traffic demands, improve this adapta-
tion over time based on reinforcement learning (Stein
et al., 2016), to establish progressive signal systems in
a fully self-organised manner (Tomforde et al., 2010;
Tomforde et al., 2008), and to provide route recom-
mendations to drivers which reflect the current state
of the traffic network (Sommer et al., 2016a). Based
on OTC, further contributions investigated are robust
traffic demand prediction (Sommer et al., 2016b), in-
tegration of these predictions in the control strate-
gies (Sommer et al., 2015), and infrastructure-based
anticipatory route guidance (Sommer et al., 2016a;
Sommer et al., 2016b).
The basis for platoon-responsive PSS is the decen-
tralised PSS (DPSS) algorithm as originally proposed
in (Tomforde et al., 2008). This three-step process
is synchronously performed in cycles by all nodes to
establish the sequence of traffic nodes for a PSS:
1. Every controller determines the pair of incoming
(‘upstream”) and outgoing (“downstream”) sec-
tions that exhibit the strongest traffic flow. It then
notifies the upstream node to be its desired prede-
cessor. After this is done by all controllers, and a
node is elected by its downstream node, a partner-
ship is confirmed. All collaborating nodes know
their partners and if they are head or tail in a PSS.
2. A common, agreed cycle time (ACT) is deter-
mined using an “echo algorithm” (Chang, 1982).
Every node i has its own desired cycle time
(DCT
i
), already selected by OTC. The ACT is the
longest of those, so the most heavily used node is
not restricted: ACT = max {DCT
i
}
The head node starts with its own DCT by setting
ACT
:
= DCT
1
and propagating it downstream.
Every node i with a higher DCT updates ACT
:
=
max{ACT, DCT
i
} until the tail node is reached.
ACT is now determined and propagated back so
every node can store it as ACT
i
:
= ACT
3. The time offsets o
i
of the nodes are calculated by
using another echo algorithm: For every node,
start times of the synchronised phase as well as
offsets, queuing and vehicle travelling times from
upstream nodes are required. When the tail is
reached, every intersection controller knows when
to activate a traffic light controller (TLC) setting
that respects the ACT and establishes the PSS.
The last step requires synchronised clocks. Also,
once-established PSS are updated.
To illustrate the effect of DPSS, we consider its in-
tegration into the OTC system and compare its perfor-
mance to uncoordinated OTC nodes. The traffic in the
Manhattan network in Figure 5 was simulated accord-
ing to a 3 hour, two-part traffic demand: In the first
half, 2900 cars are simulated with the most heavily
used routes A to B and D to C, followed by a change
to 3200 cars with the routes F to E, H to G, and J to I
mostly being chosen by the AIMSUN simulator.
Figure 5: Manhattan network with 6 intersections, each
with a 4-phased FTC (fixed-time controller) and sections
of 250m length each.
Two experiments (uncoordinated OTC nodes vs.
OTC-DPSS) were conducted. In the case of the OTC-
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
434

DPSS simulation, every ten minutes the PSSs were
established or updated, depending on the current traf-
fic situation. For the comparison, average travel times
and the average number of stops for the complete net-
work were taken into account (see Figure 6): The
number of dropped by 7%, while the average network
travel time is kept mostly constant during the simu-
lation. For both parts of traffic demand, PPSs were
established along the two or three most heavily used
routes.
This preliminary experiment already shows that
there is a benefit in establishing PSS in urban road
networks in response to changing traffic demands.
When further compared to a centralised variant as,
e.g., discussed in (Tomforde et al., 2010), we empha-
sise the advantages of this self-organised approach:
fast reaction time, robustness against individual node
failures or message loss, and low complexity of the
control algorithm. A drawback is that it requires syn-
chronised clocks. The next steps in this line of re-
search include a) the consideration of existing pla-
toons in the simulations and to adapt the PSS strategy
towards platoon-responsive behaviour, again in a fully
decentralised manner, and b) to transfer the results to
simulations of real-world typologies.
5.2 Platooning with Increased
Uncertainties
As a first step towards the self-organisation of pla-
toons in heterogeneous urban environments, we stud-
ied the challenges of platooning with increased uncer-
tainties. Cars not part of platoons or cars that consider
switching platoons may only have unreliable informa-
tion about other platoons. In an urban setting, it may
be profitable for cars to voluntarily stay halted or to
slow down considerably and wait until a desired pla-
toon passes by. However, the relevant properties of
the platoon may change within timescales of a few
minutes. Even on shorter timescales of a few sec-
onds, arrival times of platoons may change consid-
erably due to, e.g., uncertainties in traffic lights. We
expect a much more dynamic assignment of cars to
platoons followed by continuous platoon switching.
As an overview, we give a state machine in Fig. 7 that
indicates the complexity of dynamic platooning with
respect to, e.g., join-leave-join sequences and aborted
join processes.
We tested four dynamic platoon switching strate-
gies inspired by methods to solve the multi-armed
bandit problem. The assumption is that cars need
to monitor a platoon for a short duration of time be-
fore committing to join it. Relevant features of a pla-
toon (e.g., velocity, size, distance) may change dy-
namically, especially during an initial transient phase.
We assume that querying features of a platoon can be
modelled by sampling from a fixed probability den-
sity. The decision to whether to join a platoon and,
if so, which on, can be seen as a multi-armed ban-
dit problem paired with an exploitation-exploration
trade-off (when to commit). Each car stores features
of surrounding platoons in an LRU cache. The most
basic method is the ε-greedy algorithm, which selects
the best candidate with a fixed probability of 1−ε. As
a second method, we test Upper confidence bounds
(UCB), which uses a heuristic value to estimate the
true feature value. Third, we test Bayes UCB that
assumes Gaussian distributions for the platoon fea-
tures. Forth, we test Thompson Sampling operating
on α-β-distributions. As a baseline, we compare with
the decentralised static approach of Heinovski and
Dressler (Heinovski and Dressler, 2018), which as-
signs cars to platoons once and does not implement
platoon switching. In a conservative ‘start-to-end’
10-minute scenario we study how platoons form ini-
tially with all cars started as individual cars and how
switching platoons can be beneficial as all cars have
the same (far away) destination. As simulation frame-
works we use PLEXE, VEINS, and SUMO.
The dynamic methods have an advantage at later
stages of a run, as they form bigger and thus poten-
tially more efficient platoons. For example, see Fig. 8
that shows the platoon size averaged over all platoons
for a single simulation run. The give-and-take side
of dynamic platooning is shown in Fig. 9 where we
compare the benefits for the switching individual car
and the compromise for the target platoon in terms of
‘happiness’ (e.g., the sum of different individual-vs.-
platoon features, such as common destination, desired
speed, platoon size). Here, we assume that platoons
cannot reject a car that wants to join. Bayes UCB (in
the tested parameterisation) turned out to be conser-
vative and rarely switched platoons. All three other
methods are more active and have a non-zero proba-
bility that even for the switching car the situation may
worsen (upper panel in Fig. 9 for < 0). However, con-
siderable improvements can be achieved, too. As seen
in the lower panel of Fig. 9, platoons almost never
improve by allowing other cars to join for the tested
scenario. Whether platoon switching is profitable de-
pends considerably on the scenario and in particular
the diversity of the traffic (e.g., different speeds, des-
tinations) and the density of the traffic (number of
neighbouring platoons that can be joined). In sum-
mary, an intermediate result is that dynamic platoon-
ing is challenging and its benefit is sensitive to many
aspects of the traffic situation.
A Self-organising System Combining Self-adaptive Traffic Control and Urban Platooning: A Concept for Autonomous Driving
435
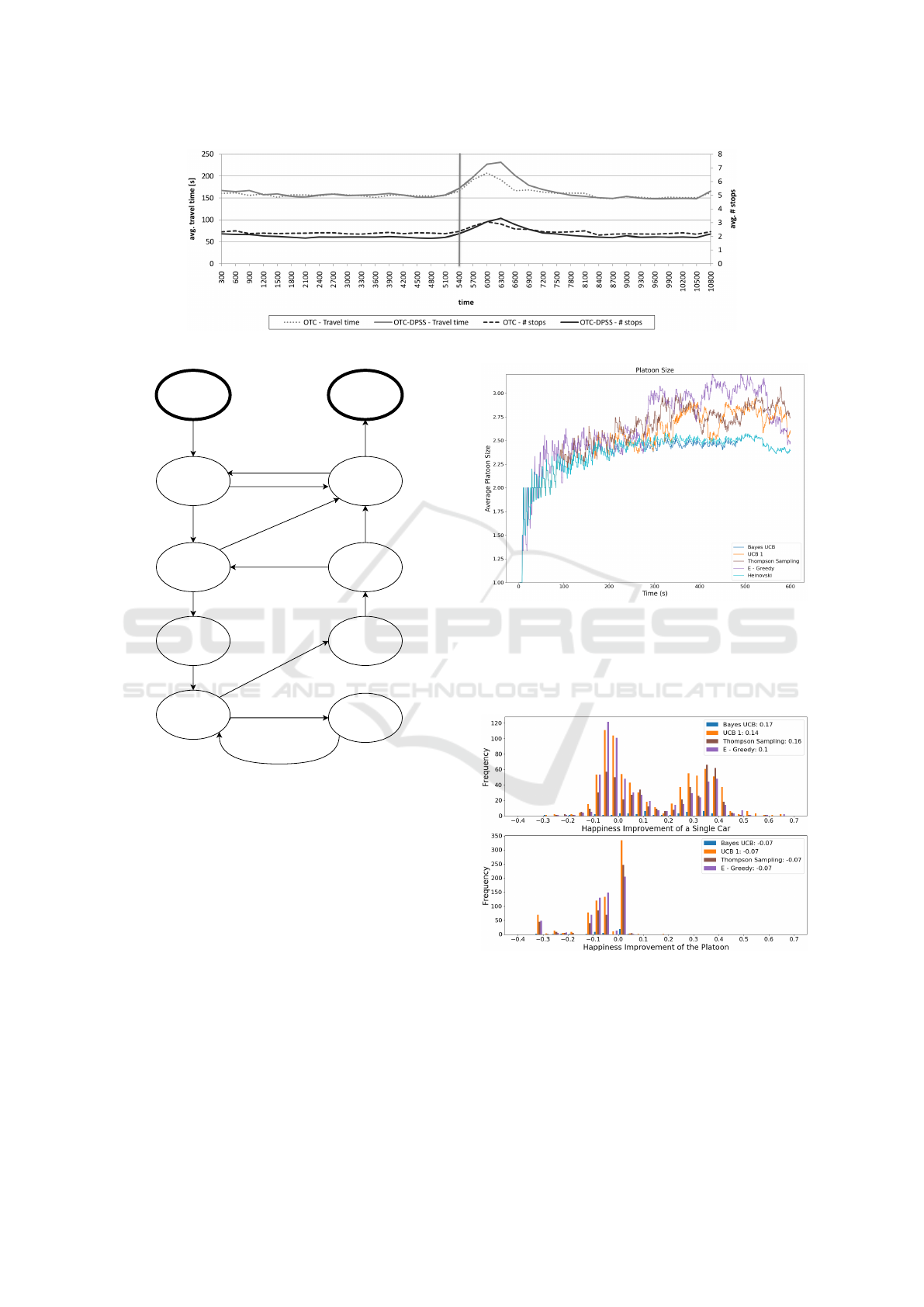
Figure 6: Average travel time and number of stops for uncoordinated OTC nodes and OTC-DPSS.
SPAWNING
(START)
SINGLE CAR
PREPARE JOINING
JOINING PROCESS
PLATOON
MERGING
PREPARE LEAVING
LEAVING PROCESS
NO PLATOONING
initial phase
passed
timer
found
candidate
candidate
not feasbile
any more
candidate
in range
setup ok
better candidate
or
unhappy / exit close
setup ok
better candidate
unhappy or
exit close
leader found
better candidate
success or abort
END
reached
end of route
exit close
Figure 7: States in dynamic platooning with decentralised
autonomous reassignment by individual cars.
6 CONCLUSION
Urban road networks are characterised by increasing
traffic loads worldwide, rendering the available ca-
pacity of handling traffic volumes increasingly inap-
propriate. As an alternative to extending the infras-
tructure, we presented a concept for improving the ef-
ficiency of utilising the existing capacity of such net-
works by introducing an integrated approach of de-
centralised dynamic platoon formation and mainte-
nance inspired by swarm robotics (Hamann, 2018), on
the one hand, as well as self-organised and platoon-
responsive coordination of traffic lights to establish
‘green waves,’ on the other hand. Based on the defini-
tion of the scenario and the underlying assumptions,
we described a research road map towards fully oper-
Figure 8: Dynamic decentralised platooning in an increased
uncertainty scenario comparing five algorithms (four dy-
namic platooning algorithms and one static platoon assign-
ment algorithm: ‘Heinvoski’), average platoon size over a
period of 10 minutes for different platoon switching strate-
gies based on multi-armed bandit methods.
Figure 9: Dynamic decentralised platooning in an increased
uncertainty scenario comparing four algorithms, average
happiness improvements for a switching individual car and
its target platoon (numbers in the legend give the average
improvement for each method).
able self-organised urban platooning, which respects
the autonomy of individual drivers and the overall ser-
vice goals of the infrastructure.
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
436

We presented two case studies of preliminary
work on integrated urban platooning with two dif-
ferent perspectives: On the one hand, we performed
an analysis of self-organised ‘green waves’ in sim-
ulations of real-world traffic network topology with
actual traffic demands. On the other hand, we pre-
sented preliminary results of comparing dynamic pla-
toon formation algorithms under increased uncer-
tainty. Our future work investigates possibilities to
close the gap between these two research directions.
REFERENCES
Aimsun SLU (2020). Aimsun Next Professional, Version 20.
Barcelona, Spain.
Bergenhem, C., Petterson, H., Coelingh, E., Englund, C.,
Shladover, S., and Tsugawa, S. (2012). Overview of
Platooning Systems. In ITSWC, pages 1393–1407.
Bhoopalam, A. K., Agatz, N., and Zuidwijk, R. (2018).
Planning of truck platoons: A literature review and di-
rections for future research. Transportation Research
Part B: Methodological, 107:212–228.
Chang, E. J. H. (1982). Echo algorithms: Depth parallel
operations on general graphs. IEEE Transactions on
Software Engineering, (4):391–401.
Eilers, S., M
˚
artensson, J., Pettersson, H., Pillado, M.,
Gallegos, D., Tobar, M., Johansson, K. H., et al.
(2015). Companion–towards co-operative platoon
management of heavy-duty vehicles. In 18th Int. Conf.
on Int. Transp. Sys., pages 1267–1273. IEEE.
Gershenson, C. and Rosenblueth, D. A. (2012). Self-
organizing traffic lights at multiple-street intersec-
tions. Complexity, 17(4):23–39.
Hall
´
e, S. and Chaib-draa, B. (2005). A collaborative driv-
ing system based on multiagent modelling and simu-
lations. Transp. Res. Part C, 13(4):320–345.
Hamann, H. (2018). Swarm Robotics: A Formal Approach.
Springer, Cham.
Heinovski, J. and Dressler, F. (2018). Platoon formation:
Optimized car to platoon assignment strategies and
protocols. In 2018 IEEE Vehicular Networking Con-
ference (VNC), pages 1–8.
Kalbitz, T. (2017). A comparison of approaches for pla-
tooning management. Technical report.
Kephart, J. and Chess, D. (2003). The Vision of Autonomic
Computing. IEEE Computer, 36(1):41–50.
Krupitzer, C., Lesch, V., Pfannem
¨
uller, M., Becker, C., and
Segata, M. (2019). A Modular Simulation Frame-
work for Analyzing Platooning Coordination. In Proc.
TOP-Cars.
Krupitzer, C., Segata, M., Breitbach, M., El-Tawab, S.,
Tomforde, S., and Becker, C. (2018). Towards
infrastructure-aided self-organized hybrid platooning.
In 2018 IEEE Global Conference on Internet of
Things (GCIoT), pages 1–6. IEEE.
M
¨
uller-Schloer, C. and Tomforde, S. (2017). Organic Com-
puting – Technical Systems for Survival in the Real
World. Birkh
¨
auser. ISBN: 978-3-319-68476-5.
Prothmann, H., Tomforde, S., Branke, J., H
¨
ahner, J.,
M
¨
uller-Schloer, C., and Schmeck, H. (2011). Or-
ganic Traffic Control. In Organic Computing – A
Paradigm Shift for Complex Systems, pages 431 – 446.
Birkh
¨
auser.
Rehena, Z. and Janssen, M. (2018). Towards a framework
for context-aware intelligent traffic management sys-
tem in smart cities. In Companion Proceedings of the
The Web Conference 2018, pages 893–898.
Segata, M., Joerer, S., Bloessl, B., Sommer, C., Dressler, F.,
and Cigno, R. L. (2014). Plexe: A platooning exten-
sion for Veins. In IEEE Vehicular Networking Con-
ference (VNC), pages 53–60.
Shladover, S. E. (2007). Path at 20—history and major
milestones. IEEE Transactions on intelligent trans-
portation systems, 8(4):584–592.
Sommer, M., Tomforde, S., and H
¨
ahner, J. (2015). “Learn-
ing a Dynamic Re-combination Strategy of Forecast
Techniques at Runtime. In 2015 Int. Conf. on Auto-
nomic Comp., pages 261 – 266. IEEE.
Sommer, M., Tomforde, S., and H
¨
ahner, J. (2016a). An Or-
ganic Computing Approach to Resilient Traffic Man-
agement. In Autonomic Road Transport Support Sys-
tems, pages 113 – 130. Birkh
¨
auer.
Sommer, M., Tomforde, S., and H
¨
ahner, J. (2016b).
Forecast-augmented Route Guidance in Urban Traf-
fic Networks based on Infrastructure Observations. In
Int. Conf. on Veh. Techn. and Int. Transp. Sys., pages
177–186. INSTICC, ScitePress.
Stein, A., Tomforde, S., Rauh, D., and H
¨
ahner, J. (2016).
Dealing with Unforeseen Situations in the Context of
Self-Adaptive Urban Traffic Control: How to Bridge
the Gap. In 2016 Int. Conf. on Autonomic Comp.
The MathWorks, I. (2019). Simulink. Natick, Mas-
sachusetts, United State.
Tomforde, S., H
¨
ahner, J., and Sick, B. (2014). Interwoven
systems. Inform. Spektrum, 37(5):483–487.
Tomforde, S., Prothmann, H., Branke, J., H
¨
ahner, J., Mnif,
M., M
¨
uller-Schloer, C., Richter, U., and Schmeck, H.
(2011). Observation and control of organic systems.
In Organic Computing—A Paradigm Shift for Com-
plex Systems, pages 325–338. Springer.
Tomforde, S., Prothmann, H., Branke, J., H
¨
ahner, J.,
M
¨
uller-Schloer, C., and Schmeck, H. (2010). Possibil-
ities and Limitations of Decentralised Traffic Control
Systems. In WCCI’10, pages 3298–3306. IEEE.
Tomforde, S., Prothmann, H., Rochner, F., Branke, J.,
H
¨
ahner, J., M
¨
uller-Schloer, C., and Schmeck, H.
(2008). Decentralised progressive signal systems for
organic traffic control. In 2008 Int. Conf. on Self-
Adaptive and Self-Organising Sys., pages 413–422.
Tsugawa, S., Kato, S., and Aoki, K. (2011). An automated
truck platoon for energy saving. In 2011 Int. Conf. on
Int. Rob. and Sys., pages 4109–4114. IEEE.
A Self-organising System Combining Self-adaptive Traffic Control and Urban Platooning: A Concept for Autonomous Driving
437
