
Flying Wing Drones based on Cricket Antennas
Walid Hassairi and Mohamed Abid
CES Laboratory, National School of Engineers of Sfax, Tunisia
Keywords: Drones with Flying Wings, Cricket, Biometric Flow Camera, UAVs for Wireless Networks, Unmanned Aerial.
Abstract: Drones represent an important part of the shipsets’ domain. There are different application areas and
depending on the field of application, problems of stability, trajectory correction and autonomy arise. The
flying wings drones are one of the drones’ categories inspired from birds flying technique. This category of
drones has several problems quite different from the classical drones. Among these problems we can identify
the drone hunter issue. To solve this problem, we propose a solution inspired from the wood crickets. In fact,
the crickets are extremely fast as they can process information locally. They have a kind of “back brains” that
process the information locally and control the movement of their legs. Unlike human who strictly send all
information to the main brain that treat them and make a reaction, the cricket has several brains inside the
body, so that it can send the information about the airflow to small brains behind its legs. These little back
brains not only process the information about the airflow that comes from the crests and their multiple hairs,
but also controls the movement of the rear legs. This unusual performance of the crickets’ crests hair was the
origin of our research contribution. We therefore propose a biometric flow camera based on several electronic
hairs connected together. We have selected REMANTA as a winged drone to implement our proposed
solution. We will integrate our micro-sensors in this 10 cm dimensions drone to solve three problems:
trajectory correction, stability, and enemy avoidance.
1 INTRODUCTION
Nowadays, the performance of embedded electronics
is increasing in a regular way, going hand by hand
with a more and more advanced miniaturization.
Consequently, a great interest is today given to “mini
or micro-drones” based on miniaturized sensors and
embedded systems. These kinds of drones have major
advantages when used in congested environments or
small spaces (urban) in which larger rotorcraft are not
well suited. Several rotorcraft architectures are
available depending on the number and arrangement
of rotors.
Numerous devices have been developed in recent
years in robotics. These devices are equipped with
different on-board sensors and used in several
application fields such as: civil security, police,
customs, military, agriculture, medicine, transport,
control, surveillance, etc. Among these devices, we
mention drones, smart cars, industrial robots, etc. The
navigation of these devices is only possible thanks to
the location and realtime orientation using onboard
sensors. In this paper, we enumerate the diverse
problems facing flying-wing drones and present a
solution to avoid the enemy. The solution aims to
provide a good and efficient motion estimation task
regardless the disturbances in the field. This solution
is based on the information coming from sensors,
inspired from the cricket antennas.
2 RELATED WORK
A drone is a small device that does not exceed the
dimension of 50 by 50 cm and weighting between
300g to 500g (see Figure 1). The drone includes 4
engines and a Lithium Polymer battery rechargeable
every 980 minutes (Hayat et al., 2016, Gupta et al.,
2015, Motlagh et al., 2016, Mozaffari et al. 2019).
Figure 1: The drone.
Hassairi, W. and Abid, M.
Flying Wing Drones based on Cricket Antennas.
DOI: 10.5220/0010436903530358
In Proceedings of the 18th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2021), pages 353-358
ISBN: 978-989-758-522-7
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
353
The heart of the drone is an electronic card, such
as ARDUINO or STM32Fx, which ensures different
actions (see Figure 2):
•
Read the flight parameters.
•
Read the detector data that describe the
rotations and displacements in three
dimensions: This is the role of the
accelerometer and the gyroscope.
•
Provide speed correction to each motor
(Motlagh et al., 2016, Khawaja et al., 2019,
Khuwaja et al., 2018, Zeng et al., 2016,
Kumbhar et al., 2016, Kelly, 2017).
Figure 2: Drone characteristics.
A drone or quadrotor has four rotors. The role of
these rotors is to rotate the drone around the vertical
axis and modify its vertical acceleration. To ensure
the stability of the drone, two propellers must be
turned in one direction and the two others in the
opposite direction.
There exist several types of drones, among them
we can find:
• Fixed wing drone: The fixed-wing drone can
reach 80 km/h and can fly for 45 minutes. In
addition to its light weight (it weighs 700
grams), its two wings are removable. It was
designed to ease manual transport. In addition,
it allows to capture photos as it has a camera
equipped with a high-resolution sensor of 14
mega pixels and an optical stabilizer (Sebbane,
2015, Korchenko and Illyash, 2013).
• Rotating wing drone: They are miniature
rotary wing drones that perform propulsion
and lift separately (reactor or propeller, and
fixed wing). Rotary wing drones use the same
body for propulsion and lift (rotors). Thanks to
this feature, this type of miniature UAV is
capable of vertical landing and takeoff, as well
as hovering or quasi- stationary flight, opening
a wide field to new applications (Al-Hourani
et al., 2014, Valcarce et al., 2013, Reynaud
and Rasheed, 2014, Tozer and Grace, 2001).
• Flying wing drone: A micro-drone or micro-
aerial vehicle is a craft less than 15 cm and
even 1 cm in length, width and height, capable
of flying. Recently, research has focused on
the development of swing-wing micro-drones
(see Figure 3). In fact, progress in
microelectronics has influenced the
manufacture of micro actuators, sensors,
communication systems, batteries, processors,
and so on, favorizing the evolution of this type
of drones (Chmaj and Selvaraj, 2015,
Zuckerberg, 2014, Gettinger, 2016).
Figure 3: Remanta flying wing drone.
3 DEFINITION OF A
FLYING-WING DRONE
Swinging wings are an alternative propulsion system
for mini and micro-drones. The flapping of wings
reproduces the flight of birds (see Figure 4) or insects
(see Figure 5).
Figure 4: Micro-drones with flapping wings (birds).
An insect consists mainly of three parts (Reynaud
and Rasheed, 2014): head, thorax, and abdomen. The
head contains vision sensors (ocelli and compound
eyes), antennas (sense organs: smell, touch, taste) and
mouthparts (to pierce, suck, suck, or chew). The chest
consists of three parts (pro, mesa, and meta-thorax) to
which are attached the legs, wings and dumbbells.
Figure 5: Micro-drones with swinging wings (insect).
3.1 The Flying Wing Movement
The wing of an insect has several degrees of freedom:
beat, rotation, orientation of the beat plane
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
354

(deflection), frequency and other degrees more
difficult to model such as bending and twisting. In this
work, the degrees of freedom considered are the
amplitudes of the angles of beat and rotation, the wing
is supposed to beat in the plane of median beat, with
a frequency of 100 Hz.
•
Degrees of freedom: The wing of the micro-
drone is considered as a rigid body which
has three degrees of freedom in rotation: the
beat, the rotation and the deviation.
•
Para-measurement of the wings: The control of
the micro- drone is done by acting on the
corners of its wings. Indeed, the flapping of the
wings creates the aerodynamic forces which is
generated following the movement of the
machine (Mazur et al., 2016).
•
Decomposition of the movement of a flying
wing: There are different variants of the flying
theory, but in general, the theory is only highly
simplified because the calculation of the
equilibrium forces remains difficult. The
aerodynamics of swing wings is more unstable
than other types of wings (see Figure 6).
Figure 6: Representation of forces exerted during a flight.
A flying wing is an aerodynamic machine with
two working times, the flapping of the wing in
elevation and its slaughter.
•
Elevation: The air hits the wing rather than
coming from the top during the beat.
•
The slaughter: the air hits the wing coming
from the bottom.
Swinging wings have two roles: lift and thrust. Lift
is the component of the force the device experiences
when moving in a fluid and acting perpendicular to the
direction of that movement. The thrust, meanwhile, is
the force exerted by the movement of the air and which
allows the displacement.
3.2 Types of Forces
There are 3 types of forces:
•
Stationary aerodynamic force: The stationary
aerodynamic force is generated by the air
pressure exerted on a flapping wing. It is
oriented in the opposite direction to the speed
of the wing.
•
Strength of added masses: Considering that the
wing is formed of a single slice, the intensity
of the force is due to the effects of added
masses during the rotation of the wing.
•
Rotational force: The wings are supposed to be
rigid and present only movements of flapping
and rotation. Bending phenomena, difficult to
model, are not considered.
3.3 Examples of Flying Wing Drones
3.3.1 Remanta
It is the first French project on micro-drones with
swinging wings. It was conducted by ONERA: Office
Nationale d’Etudes et de Recherches Aronautiques
between 2002 and 2006. Its goal was to deepen the
knowledge in aerodynamics, flight mechanics, control,
actuators, materials, and structure (see Figure 7).
Figure 7: The REMANTA micro-drone.
3.3.2 Delfly
Started in 2005 in the form of a student project at the
Technological University of Delft, Netherlands. The
drone, weighing 16 g, has two pairs of wings of 28
cm wingspan, uses a DC motor and is equipped with
an onboard camera. It can fly horizontally, stationary,
and even backwards. The next phase of this project
would be the Delfly micro aiming for a 10cm
wingspan and a mass of 3g. The final objective is to
reach at the end the Delfly nano by further
minimizing the size and the energy consumption of
the craft (see Figure 8).
Figure 8: Micro Delfly.
Flying Wing Drones based on Cricket Antennas
355
3.3.3 Micro-robotic Fly
This project is carried by the Micro-robotics
laboratory at Harvard University, USA, and is also
supported by DARPA. A first prototype, 3 cm wide,
took off in 2007, only in vertical flight with an
external power supply and without control. This
machine also uses a piezoelectric actuator, but a much
more flexible structure than that of the MFI,
especially with regard to the amplification of the
displacement transmitted to the wings (see Figure 9).
Figure 9: Micro-robotic.
4 FLYING WING DRONES’
PROBLEMS
4.1 Flying Wing Drone Range
Flying drone autonomy depend largely on the wind.
Depending on the wind strength, it can sometimes
greatly reduce the flying drone autonomy. On the
other hand, flying in the wind direction, can
sometimes prevent you from returning your drone.
The risks of loss or crash are then important
(Reynaud and Rasheed, 2012).
4.2 Flying Wing Drone Flight Speed
Indoors, these machines can fly from 70 to 80 km/h,
but can exceed 170 km/h outdoors. They can reach an
average speed of 265.87 Km/h, with a peak at 288.07
Km/h. Acceleration requires perfect control of the
machine. It is sure that the weight /power ratio is
largely to the advantage of drones. High speed flight,
but stable, is less problematic than acceleration.
Especially since it is made with blades that must
move while maintaining the gear.
4.3 Flying Wing Drone Hunters
One problem that could face a flying-wing drone is
drones-hunters. A Hunter drone rely on a set of
sensors and attack tools “including a net” to secure an
area. In practice, the drone will spot an intrusion into
its coverage area, take off, locate the target, throw a
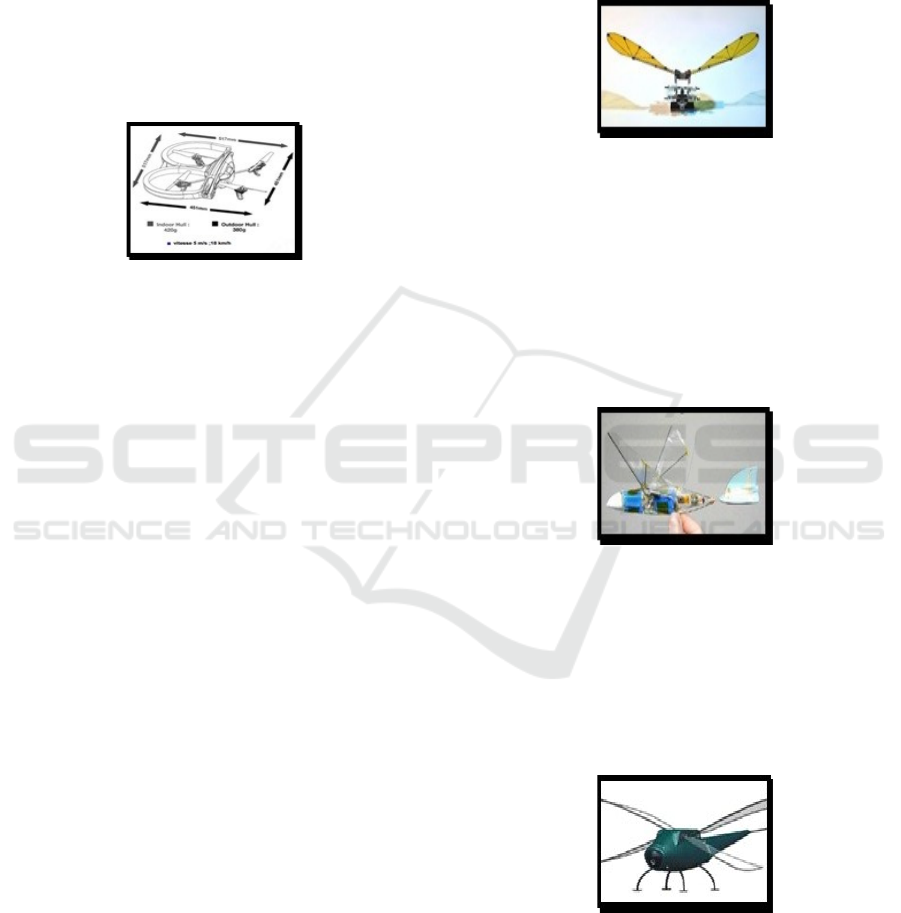
net, and bring the enemy to its base (see Figure 10).
Figure 10: Swing wing drone fighters.
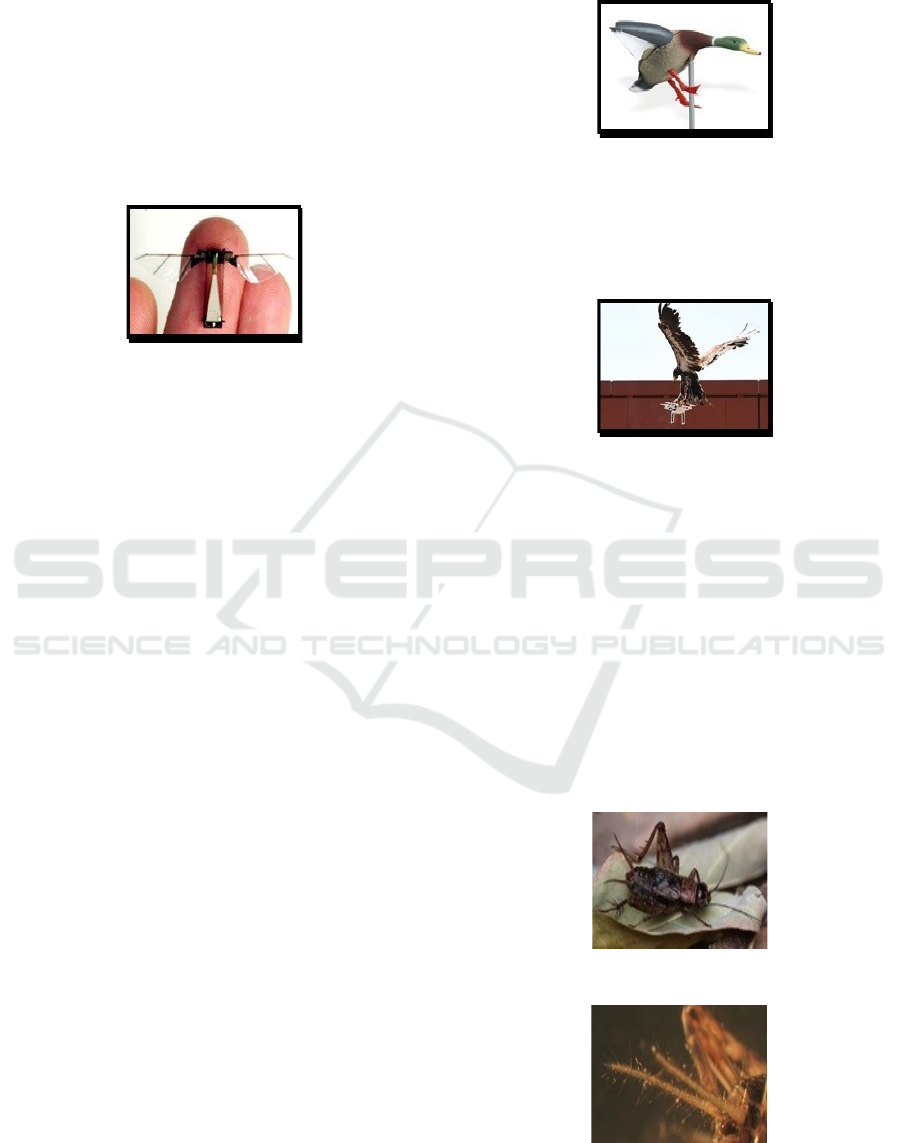
There is also a new method such as training eagles
to chase a flying-wing drone (see Figure 11). The
flying-wing drones should therefore be able to avoid
drones’ hunters.
Figure 11: An eagle hunting a flying-wing drone.
5 PROPOSED APPROACH:
SOLVE THE FLYING WING
DRONES HUNTER PROBLEM
USING CRICKET ANTENNAS
The wood cricket lives in the edges or holes and it
feeds on dry leaves. When attacked by a predator, it is
able to escape in a lightning way (see Figure 12).
We think that it could be interesting to understand
the reasons for this extreme sensitivity and use it to
support the flying-wing drones.
Figure 12: The wood cricket.
Figure 13: The antennae of the wood cricket.
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
356

When the cricket is attacked it will perceive the
flow of air that is caused by the attacker by two organs
at the back of the body called creches (see Figure 13).
These organs look like antennas on which there are a
lot of hair. The hairs on these antennas are used to
perceive the tiny vibrations of the air. Each of these
hairs is extremely powerful, it needs a tenth of the
energy of a photon to react and the insect will
combine all this information to escape before being
reached by the predator. The sensory hair of the
cricket is quite unusual because it is very simple and
at the same time extremely powerful, it is nothing but
a simple tube that will not bend when the air arrives
on it, it goes to move to its base. There is only one
neuron at the base of this hair, which is also unusual,
and it is this simplicity that makes these sensory hairs
so effective.
The cricket therefore has a kind of “back brain”
that processes the information and controls the
movement of its legs. Unlike human, who strictly send
all the information to the main brain that will treat them
and make a reaction, the cricket has several brains
inside the body, so that it will be able to send
information about the air flow to a small brain just
behind its antennas. This little brain not only processes
the information that comes from the crests and their
multiple hairs, but also controls the movement of the
legs. That’s why over millions of years, crickets have
been able to escape predators. They are extremely fast
because they process information locally. The
understanding of the extreme sensitivity of the cricket
hair is a source of inspiration from a biomechanical and
electronic point of view, in order to imagine high
performance micro-sensors. The unusual performance
of the cricket hair has motivated the objective of our
research (see Figure 14).
Figure 14: Micro-sensors.
Figure 15: Gathering the micro-sensors.
We have therefore imagined that we can connect
several electronic hairs together and this gives birth
to a biomimetic flow camera (see Figure 15).
In other words, instead of the pixels found on the
usual cameras, we will have micro sensors (similar to
cricket hairs). We will therefore have a series of
micro sensors that measure a flow image. This work,
which has a long-term or even medium-term scope,
will be useful in the context of future flying wings
drones. In fact, in this kind of systems, it is necessary
that the movement of the wing is controlled in
continuous time. The wing does not always have the
same movement, so we must be able to measure
what the wing does, especially in the case of
turbulence. And here our hairs are absolutely ideal
as they are small and can be put everywhere (see
Figure 16). We have selected REMANTA as a
winged drone to implement our proposed solution.
We will integrate our micro-sensors in this 10 cm
dimensions drone to solve three problems: trajectory
correction, stability, and enemy avoidance. We will
afterward reduce the size to reach a drone of 2 cm
using other materials that have reduced size.
Figure 16: Micro-sensors in REMANTA.
6 CONCLUSIONS AND
ONGOING WORK
In this paper, we have presented the technological
advances and the growing interest in aerial robotics
over the past ten years. The different types and forms
of air targets created by the great utility, allow to
accomplish the required tasks in complex
environments. Since the perception of the
environment is a necessary process in these tasks, the
majority of the moving drones are connected by
different sensors used to navigate and detect obstacles
during their journey. Our studied system the flying
wing drone is among these drones, that requires
sensors to control and monitor its attitude. In this
paper, we presented an overview of the different
stages of development of this project. Indeed, after
presenting the state of the art, defining the drone, their
flight mode, the different types of drone, we focused
on the flying-wing drone problems. We presented our
idea to solve the course correction and enemy escape
Flying Wing Drones based on Cricket Antennas
357

problems, inspired from the wood cricket. The
solution consists in adding micro-sensors placed in
the rear of swinging wings drones. We plan to reduce
the size to reach a 2 cm drone using other materials.
REFERENCES
Hayat, S., Yanmaz, E., & Muzaffar, R. (2016). Survey on
unmanned aerial vehicle networks for civil
applications: A communications viewpoint. IEEE
Communications Surveys & Tutorials, 18(4), 2624-
2661.
Gupta, L., Jain, R., & Vaszkun, G. (2015). Survey of
important issues in UAV communication networks.
IEEE Communications Surveys & Tutorials, 18(2),
1123-1152.
Motlagh, N. H., Taleb, T., & Arouk, O. (2016). Low-
altitude unmanned aerial vehicles-based internet of
things services: Comprehensive survey and future
perspectives. IEEE Internet of Things Journal, 3(6),
899-922.
Mozaffari, M., Saad, W., Bennis, M., Nam, Y. H., &
Debbah, M. (2019). A tutorial on UAVs for wireless
networks: Applications, challenges, and open
problems. IEEE communications surveys & tutorials,
21(3), 2334-2360.
Khawaja, W., Guvenc, I., Matolak, D. W., Fiebig, U. C., &
Schneckenburger, N. (2019). A survey of air-to-ground
propagation channel modeling for unmanned aerial
vehicles. IEEE Communications Surveys & Tutorials,
21(3), 2361-2391.
Khuwaja, A. A., Chen, Y., Zhao, N., Alouini, M. S., &
Dobbins, P. (2018). A survey of channel modeling for
UAV communications. IEEE Communications Surveys
& Tutorials, 20(4), 2804-2821.
Zeng, Y., Zhang, R., & Lim, T. J. (2016). Wireless
communications with unmanned aerial vehicles:
Opportunities and challenges. IEEE Communications
Magazine, 54(5), 36-42.
Kumbhar, A., Koohifar, F., Güvenç, I., & Mueller, B.
(2016). A survey on legacy and emerging technologies
for public safety communications. IEEE
Communications Surveys & Tutorials, 19(1), 97-124.
Kelly, T. (2017). The booming demand for commercial
drone pilots. The Atlantic.
Sebbane, Y. B. (2015). Smart autonomous aircraft: flight
control and planning for UAV. Crc Press.
Korchenko, A. G., & Illyash, O. S. (2013). The generalized
classification of unmanned air vehicles. In 2013 IEEE
2nd International Conference Actual Problems of
Unmanned Air Vehicles Developments Proceedings
(APUAVD) (pp. 28-34). IEEE.
Al-Hourani, A., Kandeepan, S., & Jamalipour, A. (2014,
December). Modeling air-to-ground path loss for low
altitude platforms in urban environments. In 2014 IEEE
global communications conference (pp. 2898-2904).
IEEE.
Valcarce, A., Rasheed, T., Gomez, K., Kandeepan, S.,
Reynaud, L., Hermenier, R., ... & Bucaille, I. (2013).
Airborne base stations for emergency and temporary
events. In International conference on personal satellite
services (pp. 13-25). Springer, Cham.
Reynaud, L., & Rasheed, T. (2012). Deployable aerial
communication networks: challenges for futuristic
applications. In Proceedings of the 9th ACM
symposium on Performance evaluation of wireless ad
hoc, sensor, and ubiquitous networks (pp. 9-16).
Tozer, T., & Grace, D. (2001). High-altitude platforms for
wireless communications. Electronics &
communication engineering journal, 13(3), 127-137.
Chmaj, G., & Selvaraj, H. (2015). Distributed processing
applications for UAV/drones: a survey. In Progress in
Systems Engineering (pp. 449-454). Springer, Cham.
Zuckerberg, M. (2014). Connecting the world from the sky.
Gettinger, D. (2016). Drone spending in the fiscal year 2017
defense budget. Center for the Study of the Drone at
Bard College.
Mazur, M., Wisniewski, A., & McMillan, J. (2016). Clarity
from above: PwC global report on the commercial
applications of drone technology. Warsaw: Drone
Powered Solutions, PriceWater house Coopers.
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
358
