
Soft Fault Detection and Localization in an Unshielded Twisted Pair
Network using Power Line Communication
Abdel Karim Abdel Karim
1,2 a
, Virginie Degardin
2 b
, Vincent Cocquempot
1 c
and M. Amine Atoui
1,2 d
1
Universit
´
e de Lille, CNRS, Centrale Lille, UMR 9189 - CRIStAL, F-59000 Lille, France
2
Univ. Lille, CNRS, Centrale Lille, Univ. Polytechnique Hauts-de-France, UMR 8520 - IEMN, F-59000 Lille, France
Keywords:
Vehicular Embedded Networks, Monitoring, Fault Detection, Fault Localization, Soft Fault, Transmission
System.
Abstract:
Vehicular electrical wires and communication systems can be affected by faults. Depending on their severity,
faults can be divided into two families: hard and soft faults. Hard faults indicate open/short circuits that can
lead to serious breakdowns because they prevent the flow of energy or information. Even though soft faults
do not have such severe impacts on the system, they may develop into hard faults in the long term, hence the
need to detect them. In this paper, an unshielded twisted pair cable that undergoes a water-tree degradation
is considered. A soft fault, which may correspond to the effect of a mechanical constraint on the cable, is
introduced as a series resistor. The studied network is a tree-shape network composed of one source and
multiple receivers, one at each end of a branch. Assuming that these receivers operate in a healthy state, to
detect the fault, the transfer function from each receiver are monitored and a detection index is used. Another
index, based on the comparison of the effect of the fault at each endpoint, is proposed to locate the affected
branch. To summarize the detection and localization algorithm, a signature matrix is generated. Simulation
results are presented to illustrate our approach.
1 INTRODUCTION
As part of autonomous/electric vehicles, Advanced
Driver Assistance Systems (ADAS) have been inte-
grated into vehicles to ensure road safety and driving
comfort (Lindgren and Chen, 2006). These systems
rely on electronic equipments that exchange informa-
tion via dedicated communication networks. Since
the One-Pair Ether-Net Alliance has encouraged the
adoption of the automotive Ethernet for modern ve-
hicular networks, the studied network is based on
Unshielded Twisted Pair (UTP) cables (Zweck and
Communication, 2019). This network is subject to
failures that can have fatal consequences. Hence the
need of a monitoring system that can distinguish be-
tween healthy and faulty states. Reflectometry and its
derivatives are the main used monitoring methods for
fault detection in networks (Furse et al., 2020). Time
a
https://orcid.org/0000-0003-4390-9858
b
https://orcid.org/0000-0002-8716-7940
c
https://orcid.org/0000-0001-7281-911X
d
https://orcid.org/0000-0003-1893-5819
Domain Reflectometry (TDR) and Frequency Do-
main Reflectometry (FDR) form the two main classes
of reflectometry systems (Furse et al., 2003). The
experiments using reflectometry realized by (Kafal
and Benoit, 2018), on a two-wire transmission line,
demonstrate that soft faults can have signatures which
are much weaker than changes in impedance which
can affect a cable during actual installation condi-
tions. Furthermore, the measurement and simulations
in (Griffiths et al., 2006), on a two-wire conductor
General Cable SKU 02301.R5.02 lamp cord (Corpo-
ration, 2017), have also shown that these signatures
are invisible using TDR, FDR and Spread-spectrum
TDR in the frequency range of 100 MHz – 200 MHz
due to the normal impedance variation in the realistic
environment of the cable. Moreover, even if the lat-
ter was detected, reflectometry based methods have a
major drawback due to the use of special, expensive
and bulky sensors and instruments (Huo et al., 2019).
Finally, according to (Kafal and Benoit, 2018), the ef-
fect of nodes on a reflectogram can be much stronger
than the effect of a soft fault. A Power Line Commu-
nication (PLC) system can also be used to monitor the
82
Abdel Karim, A., Degardin, V., Cocquempot, V. and Atoui, M.
Soft Fault Detection and Localization in an Unshielded Twisted Pair Network using Power Line Communication.
DOI: 10.5220/0010438000820089
In Proceedings of the 7th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2021), pages 82-89
ISBN: 978-989-758-513-5
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

network. In (Lallbeeharry et al., 2018), a PLC system
implemented a real time fault detection between two
modems. The time evolution of the transfer function
H( f ) between the two ends of a UTP cable is moni-
tored, and statistical coefficients (i.e. Correlation co-
efficient ρ and Euclidean distance Eu) are used to de-
tect soft faults.
In this paper, a soft fault detection and localization
method is proposed and analyzed in a tree-shape net-
work composed of one source and multiple receivers,
one at each end of a branch. The soft fault - which
can appear, for example, after an electric discharge
or may be due to a bad contact between a wire and a
connector - is represented by the insertion of a series
resistance such as in (Lallbeeharry et al., 2018), while
the network is being degraded by a Water Tree (WT)
phenomenon as described in (Huo et al., 2019). This
phenomenon represents the change in the dielectric
permittivity of a cable insulation caused by humid-
ity. The transfer function from each point of view of
the receivers, between the source and each receiver is
measured by the receivers at the end of each branch of
the network, through Orthogonal Frequency Division
Multiplexing (OFDM) pilot symbols sending by the
source. Afterwards, two indices extracted from H( f )
are used to detect the presence of a soft fault then to
locate the affected branch. The detection index is cal-
culated between a reference H( f ) and the successive
ones which are measured. Once the presence of a fault
is confirmed, a localization index is then computed
to determine the branch where the fault is located.
The fault detection and localization methodology pro-
posed in this paper is general, but for presentation rea-
son, a network comprising one source, three receivers
and two nodes is studied. In section 2, the detection
and localization indices is presented along with the
proposed method. To validate this work, data are gen-
erated using cable, degradation and soft fault models
that are detailed in section 3.1. Simulations and the
results are carried on in section 3.2. Conclusions and
future work to be conducted close this paper.
2 FAULT DETECTION AND
LOCALIZATION
2.1 Fault Diagnostic Indices
The indices presented in this section are based only
on the transfer function H( f ) of the network.
Definition 1. CORRELATION COEFFICIENT. The
correlation coefficient ρ
i
expresses the distance be-
tween the reference transfer function and the succes-
sive acquisitions (measurements) of the transfer func-
tion at each receiver R
i
.
ρ
i
=
|
∑
k
H
Re f erence
R
i
( f
k
) · H
∗Test
R
i
( f
k
)|
∑
k
|H
Re f erence
R
i
( f
k
)|
2
(1)
H
Re f erence
R
i
is the first acquisition that is supposed to
be the transfer function for the healthy network at the
receiver R
i
. H
Test
R
i
is the measured transfer function
that needs to be tested at a given time at the receiver
R
i
. f
k
denotes the frequency in the range of 1 MHz
to 100 MHz with a step of 10 kHz. X
∗
denotes the
conjugate of X, and |X | is the module of X.
Definition 2. DETECTION INDEX. The detection in-
dex I
D
i
is defined as :
I
D
i
= |1 − ρ
i
| (2)
In a healthy case, I
D
i
computed at each receiver
i, is equal or close to zero and it deviates from
zero when a fault occurs or in presence of network
degradation. Once the fault is detected by one of the
receiver, the network is considered as faulty.
Definition 3. LOCALIZATION INDEX. The localiza-
tion index I
L
i
is defined as the ratio between trans-
fer function measured after fault detection at each re-
ceiver R
i
and the transfer function measured before
fault detection at each receiver R
i
.
I
L
i
=
H
Faulty
R
i
( f )
H
Healthy
R
i
( f )
(3)
where I
L
i
denotes the localization index at the receiver
R
i
. H
Healthy
R
i
( f ) and H
Faulty
R
i
( f ) are respectively the
transfer function before and after the fault detection.
2.2 Illustration on a Study Case
To show the usefulness of the localization index, the
three cases in Fig. 1 are explored. Let consider the
multipath model found in (Zimmermann and Dostert,
1999), (Zimmermann and Dostert, 2002) that de-
scribes the propagation of the waves in a network.
According to the multipath signal propagation model,
there are several possible paths from the source S to
the receiver R
i
. Furthermore, the signal is reflected
at each impedance discontinuity (localized fault and
node). The received signal is thus a superposition of
the first M significant paths considered. Hence, the
transfer function H( f ) can be represented by the fol-
lowing equation :
H( f ) =
M
∑
i=1
g
i
· e
−γ·d
i
(4)
Soft Fault Detection and Localization in an Unshielded Twisted Pair Network using Power Line Communication
83

Figure 1: Y-Shaped networks.
where M represents the number of the most signifi-
cant paths, g
i
denotes the weighting factor of the path
i representing the product of the reflection and trans-
mission factors along the path, γ is the complex prop-
agation constant and d
i
is the length of the path i. γ
and g
i
are both depending on the frequency f .
To simplify and to limit the number of paths M,
the source and the receivers are considered matched
to the network and the first two paths are taken into
consideration.
1. Healthy Network.
In a healthy network, only the direct path between
the source and each receiver exists. Thus, the
transfer function from the point of view of each
receiver is :
H
Healthy
R
1
( f ) = t
1N
· e
−γ·(l
0
+l
1
)
(5)
H
Healthy
R
2
( f ) = t
1N
· e
−γ·(l
0
+l
2
)
(6)
where t
1N
is the transmission factor of the node
N, l
0
, l
1
and l
2
are the lengths of each branch
presented in Fig. 1.
2. Appearance of a Soft Abrupt Fault Before the
Node.
If a fault occurs at the branch situated before the
node N, several paths are possible.
From the point of view of R
1
, the two most signif-
icant paths are :
- Path no.1 : S - F - N - R
1
.
- Path no.2 : S - F - N - F - N - R
1
.
Therefore, the frequency response from S to R
1
can be expressed as:
H
R
1
( f ) = t
F
·t
2N
· e
−γ·(l
0
+l
1
)
+ (7)
t
F
· r
2N
· r
F
· e
−γ·2·(l
0
−x)
·t
2N
· e
−γ·(l
0
+l
1
)
= t
F
· (1 +r
2N
· r
F
· e
−γ·2·(l
0
−x)
) · t
2N
· e
−γ·(l
0
+l
1
)
By analogy for the second receiver R
2
:
H
R
2
( f ) = t
F
·t
2N
· e
−γ·(l
0
+l
2
)
+ (8)
t
F
· r
2N
· r
F
· e
−γ·2·(l
0
−x)
·t
2N
· e
−γ·(l
0
+l
2
)
= t
F
· (1 +r
2N
· r
F
· e
−γ·2·(l
0
−x)
) · t
2N
· e
−γ·(l
0
+l
2
)
where t
F
and r
F
represent respectively the trans-
mission and reflection factors of the fault. t
2N
is
the transmission factor of the node N. The at-
tenuation due to the signal propagation from the
source to each receiver i, e
−γ·(l
0
+l
i
)
, are multiplied
by the same value in (7) and (8).
Hence, I
L
1
and I
L
2
are equal :
I
L
1
= I
L
2
= t
F
·(1 + r
2N
·r
F
·e
−γ·2·(l
0
−x)
)·
t
2N
t
1N
(9)
3. Appearance of a Soft Abrupt Fault after the
Node.
If a fault occurs after the node N in the branch
directly linked to the receiver R
1
, several paths are
also possible. From the point of view of R
1
, the
transfer function is expressed as:
H
R
1
( f ) = t
F
·t
3N
· e
−γ·(l
0
+l
1
)
+ (10)
t
F
· r
3N
· r
F
· e
−γ·2·x
·t
3N
· e
−γ·(l
0
+l
1
)
= t
F
· (1 + r
3N
· r
F
· e
−γ·2·x
)t
3N
· e
−γ·(l
0
+l
1
)
From the point of view of R
2
, the transfer function
is expressed as :
H
R
2
( f ) = t
3N
· e
−γ·(l
0
+l
2
)
+ (11)
t
3N
· r
F
· e
−γ·2·x
·t
3N
· e
−γ·(l
0
+l
2
)
= (1 +t
3N
· r
F
· e
−γ·2·x
)t
3N
· e
−γ·(l
0
+l
2
)
where r
F
denotes the reflection coefficient of the
fault. t
3N
and r
3N
are respectively the transmission
and reflection coefficient of the node N. In this
case, the weighting factors from (10) and (11) are
different. Therefore, I
L
1
is different than I
L
2
:
I
L
1
= t
F
· (1 + r
3N
· r
F
· e
−γ·2·x
) ·
t
3N
t
1N
(12)
I
L
2
= (1 +t
3N
· r
F
· e
−γ·2·x
) ·
t
3N
t
1N
(13)
This index allows us to eliminate the effect of the
attenuation due to the signal propagation from the
source to the i
th
receiver : e
−γ(l
0
+l
i
)
. This index de-
pends on the attenuation due to the propagation be-
tween the node and the fault positions : e
−γ·2·x
, the
severity of the fault represented by r
F
and/or t
F
and
the impact of the fault on the node represented by the
change of the transmission and the reflection factors
of the node.
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
84

2.3 Fault Detection and Localization
Method
The proposed fault detection and localization method
(see Fig. 2) is based on the two aforementioned in-
dices.
Compute the localization indices:
Compute the detection indices:
Healthy
network
Faulty network
Compare to the signature matrix
Yes
No
Fault is at branch
Detection
Localization
Evaluate their equality and minimum inequality
Figure 2: Fault detection and localization algorithm.
It is divided into two phases : ”Detection” then
”Localization”. These phases are discussed in the
following.
1. Detection Phase:
The network is considered as faulty, if, at least,
one of the indices, I
D
i
, computed at each re-
ceiver is higher than its predefined threshold ψ
i
.
Otherwise the network is considered as healthy.
The threshold ψ
i
is empirically deduced to detect
abrupt soft faults while taking into account the
slow variation due to WT. The localization phase
is triggered after the presence of a fault is con-
firmed.
2. Localization Phase:
When a fault is detected, the indices I
L
i
are com-
puted. To determine the branch where the present
fault is located, they are evaluated and compared
to each branch’s fault reference signature. This
comparison would suggest a set of candidates.
A candidate stands for the presence of fault in a
branch j, denoted F
B
j
. Multiple faults are out of
the scope of this paper. Only single faults are as-
sumed.
Table 1: Signature matrix.
F
B
1
. . . F
B
N
I
L
1
α
1,1
··· α
1,N
.
.
.
.
.
.
.
.
.
.
.
.
I
L
m
α
m,1
. . . α
m,N
min
R
i
(I
L
i
) β
1
. . . β
N
The proposed signature matrix is derived and de-
pends on the considered network’s topology. The ma-
trix rows correspond to the behaviour of m + 1 indica-
tors, the m receiver’s localization indices plus the set
of receivers at which the localisation indices values
are minimum, towards the presence of a fault F
B
j
. Its
columns describe the N branch’s fault reference sig-
natures.
A general signature matrix is provided in table 1.
It is characterized by two types of parameters: α and
β. A parameters α
i, j
represents a Boolean variable
which takes its values in the set {0, 1}. Equal local-
ization indices relative to a fault in a branch j, admit
a value 1 for their Boolean variables in the column
j of the signature matrix. The Boolean variables of
those with different values take 0. A parameter β
j
is a subset, in respect to F
B
j
, of receivers at which
the localisation indices’ values are the lowest, such as
β
j
⊂ {R
1
, . . . , R
m
}.
The signature matrix is build in such a way that
faults are decoupled in a set of tests such as the m +1
indicators reacts to a particular subset of faults and
each branch’s fault j is characterised by a certain con-
figuration of the indicators values. Different configu-
rations arise depending on where the fault is located
on the network. These configurations can be gener-
alised by four cases.
• If a fault F
B
j
occurs prior to all the network’s
nodes, the closest branch to the source: all the m
indices computed at the receivers situated after it
lead to a same value. The localization indices are
equal, ∀i, α
i, j
= 1.
• If a fault F
B
j
occurs behind all the network’s
nodes, at the end of the network: all the m indices
computed at the receivers situated before it take
different values, ∀i, k, α
i, j
6= α
k, j
. The localization
index i directly linked to the affected branch has
the lowest value among all the indices, β
j
= I
L
i
.
• If a fault F
B
j
is located at the branch directly
linked to a receiver i: only the indices computed
at the receivers situated after the nearest node
to the receiver i share the same values, for each
k, k > i, α
k, j
= 1. The index of localization related
to the receiver i has the lowest value among all the
indices, β
j
= I
L
i
.
• If a fault F
B
j
occurs between two nodes, a branch
not linked to any receiver: only the indices com-
puted at the receivers situated before the farthest
node, among the two nodes, to the source take dif-
ferent values, for each k, k < i, α
i, j
6= α
k, j
. The
receivers sharing the same values have the lowest
values compared to the remaining indices’ values.
for each k, k > i, I
L
k
∈ β
j
.
Soft Fault Detection and Localization in an Unshielded Twisted Pair Network using Power Line Communication
85
2.4 Summary
The step-by-step procedure of the proposed fault de-
tection and localization scheme based on PLC is sum-
marized as follows:
1. Construct the signature matrix with respect to the
network topology.
2. Define the reference H( f ) from each receiver’s
point of view.
3. Acquire successive H( f ) from each receiver i,
compute and monitor I
D
i
.
4. If no change is detected, return to step (3), other-
wise go to the next step.
5. Compute the localization indices I
L
i
and evaluate
their equality and minimum inequality.
6. Compare the resulting evaluation vector of step 5
to the fault signature in the signature matrix.
7. From step (6), deduce the faulty branch.
3 APPLICATION CASE STUDY
3.1 Data Generation
In this work, the studied network is the automotive
Ethernet, which is based on Unshielded Twisted Pairs
(UTP). This type of network is chosen for its ability
to meet the needs of ADAS (Hank et al., 2013).
Simulations of such a network are used to vali-
date the proposed method, before applying it in a real
network. In this paper, a deterministic chain matrices
-based model (Galli and Banwell, 2005) of the net-
work is used to compute H( f ). The model is based
on the physical characteristics of the network (topol-
ogy, type of cable, terminal devices i.e. source and
receivers) and on the transmission line theory. Each
quadripole element of the network is represented by
its corresponding ABCD chain matrix and the global
ABCD chain matrix is obtained by the product of
each individual element matrix (Peres et al., 2003).
For UTP networks, chain matrices can be computed
using the equations found in (Al-Asadi et al., 2000),
(El Sahmarany, 2013), (Truong, 2000) and (Ramo
et al., 1994). To our knowledge, the work by (El Sah-
marany, 2013) is the only one between them that took
the twisting phenomenon in consideration. Thus, the
equations found in the latter one are used to compute
those parameters in the marge of frequencies going
from 1 MHz to 100 MHz. These parameters are used
in the deterministic model to deduce H( f ).
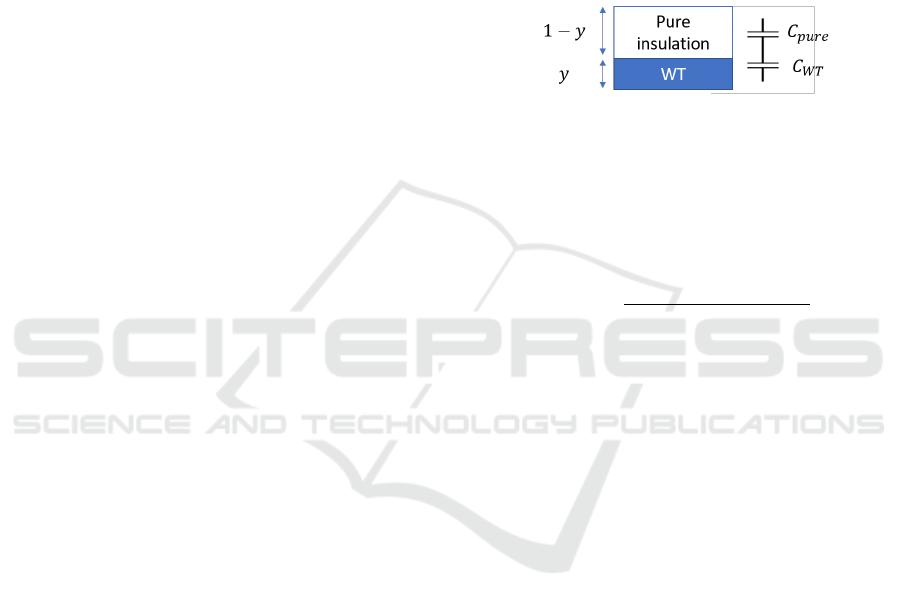
3.1.1 Degradation and Soft Fault Model
Degradation: The degradation is defined by an irre-
versible process in one or more of the primary param-
eters of the cable with either time, duration of use or
an external cause (e.g. humidity, heat, etc . . . ). The
WT degradation caused by humidity affects the di-
electric permittivity of the wire ε. Since the capaci-
tance of the cable is directly related to ε, then the WT
degradation is represented as two capacitors as shown
in Fig. 3 (Mugala, 2005).
Figure 3: Representation of an aged sample.
A model of the WT degradation seen in (F
¨
orstel
and Lampe, 2017) and (Sanniyati et al., 2016) is used
to reproduce a degradation going from 0% to 5% with
a step of 0.1% (y = 0 to y = 0.05). The total permit-
tivity of an aged sample given by (Huo et al., 2019) is
computed using (14) :
ε
total
=
ε
insulator
ε
W T
y ε
insulator
+ (1 − y)ε
W T
(14)
where ε
W T
is the permittivity of the affected zone
shown in blue in Fig. 3. ε
insulator
is the permittivity of
the pure insulation and y is the percentage of affected
zone.
In the following, the WT degradation is considered
as a normal evolution of the cable characteristics.
Soft Fault: This type of faults only produces
very small impedance changes (Auzanneau, 2013).
Therefore, a soft fault is usually represented by a
small localized modification of the characteristic
impedance of the line. In this paper, the soft fault is
represented by a sudden insertion of series resistor.
3.2 Simulations and Results
As an example, several simulations are conducted on
the network shown in Fig. 4. This network has one
source, three receivers, two nodes and five branches.
Note that the source and all the receivers are matched
to the line (Same impedance of the characteristic
impedance of the network Z
c
= 120 Ω).
The three transfer functions of the network are com-
puted and their corresponding Bode diagram are
shown in Fig. 5 and 6.
1. Detection: We assume that the level of degrada-
tion increases by 1% every 50 successive acquisi-
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
86

Figure 4: Unshielded twisted pair network.
0 1 2 3 4 5 6 7 8 9 10
Frequency(Hz)
10
7
-14
-12
-10
-8
-6
-4
-2
|H(f)|dB
Module of the transfer functions H
R
i
(f)
Receiver 1
Receiver 2
Receiver 3
Figure 5: Module of the transfer function of each receiver
|H
R
i
( f )|.
tions of H
R
i
( f ). In this case, where the cable un-
dergoes a WT degradation with the absence of a
soft fault, the computed I
D
i
between H
re f erence
R
i
( f )
and H
test
R
i
( f ) increases at a slow pace as shown in
Fig. 7 for each receiver. H
test
R
i
( f ) denotes the suc-
cessive test data that needs to be tested at a given
time. When an abrupt soft fault occurs, its effect
differs from one receiver to another. A 5 Ω resis-
tor is inserted in series in the branch B
3
at t = t
0
,
a rupture in the variation of the detection index
appears as shown in Fig. 8. Therefore, to detect
the abrupt soft fault, it is sufficient to detect the
rupture by one of the receiver.
2. Localization: Once the fault is detected, to locate
the affected branch, the localization index I
L
i
is
computed at each receiver. Since I
L
i
is a complex
index, its module |I
L
i
| and phase φ(I
L
i
) are pre-
sented in Fig. 9.
The results show that I
L
1
is equal to I
L
2
and both of
them are different from I
L
3
as it has been proven
0 1 2 3 4 5 6 7 8 9 10
Frequency(Hz)
10
7
-4
-2
0
2
4
(H(f)) rad
Phase of the transfer functions H
R
i
(f)
Receiver 1
Receiver 2
Receiver 3
Figure 6: Phase of the transfer function of each receiver
φ(H
R
i
( f )).
0 500 1000 1500 2000 2500 3000
Observation
-2
0
2
4
6
8
10
12
I
d
i
10
-3
Variation of the detection index with observations
I
d
1
I
d
2
I
d
3
Figure 7: Variation of the detection indices (Degraded net-
work without abrupt soft fault).
0 500 1000 1500 2000 2500 3000
Observation
0
0.01
0.02
0.03
0.04
I
d
i
Variation of the detection index with observations
I
d
1
I
d
2
I
d
3
t
0
Figure 8: Variation of the detection indices (Degraded net-
work with the appearance of a soft fault at t
0
).
in section 2. By changing the position of the fault
from one branch to another and observing the be-
havior of the localization indices a topology de-
pendent signature matrix can be obtained.
Table 2: Signature matrix of the network in Fig.4.
F
B
1
F
B
2
F
B
3
F
B
4
F
B
5
I
L
1
1 1 1 0 0
I
L
2
1 1 1 0 0
I
L
3
1 0 0 0 0
min
R
i
(I
L
i
) R
3
R
1
∩ R
2
R
2
R
1
Note that a 1 in the table represents equality and a
0 represents a difference. All the indices holding
the number 1 are equal and the index holding the
number 0 is different from all the other indices.
For instance, let consider that the localized soft
fault occurs at the branch B
2
or the branch B
3
. The
fault is then located before the node connected to
the receivers R
1
and R
2
, therefore I
L
1
is equal to
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000
Frequency(Hz)
0.95
1
1.05
|I
L
i
|
Variation of the localization index module with frequency
Receiver 1
Receiver 2
Receiver 3
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000
Frequency(Hz)
-0.05
0
0.05
(I
L
i
) rad
Variation of the localization index phase with frequency
Receiver 1
Receiver 2
Receiver 3
Figure 9: Variation of the localization index. A 5 Ω resistor
is inserted in series in the branch B
3
at t = t
0
.
Soft Fault Detection and Localization in an Unshielded Twisted Pair Network using Power Line Communication
87

I
L
2
. To differentiate between these two cases (fault
at B
2
or at B
3
), the minimum index should then be
computed. The branch B
2
is directly linked to R
3
,
thus if the fault is in this branch, the minimum
index is I
L
3
. If there was no exclusive minimum
min(I
L
i
) = I
L
1
= I
L
2
, then the fault is in the com-
mon branch of the two receivers as in the case of
fault in B
3
.
4 CONCLUSIONS AND FUTURE
WORK
In this paper, a fault detection and localization
methodology based on the transfer function H( f ) is
proposed to detect a soft fault. This methodology is
based on two indices. At first, the detection index is
computed. Once the fault is detected by one of the
receivers, the localization index is computed at each
endpoint of the network. The localization indices are
checked against one another to verify whether they
are equal or not. The results of these tests are com-
pared to each branch fault’s signature in the proposed
signature matrix. The proposed matrix is constructed
with respect to the network topology. To illustrate our
proposal, two bus networks are considered: a degrad-
ing two nodes network and an Y-shaped (one node)
network.
Further work will be realized to expand the valid-
ity and study the sensitivity of the detection and lo-
calization indices, in more complex networks. Also,
it would be interesting to introduce statistical equal-
ity tests for better and accurate comparison between
localization indices when noise is considered. This
approach will be also validated on a test bench that is
under construction.
ACKNOWLEDGEMENTS
This research work is done in the framework of the
ELSAT2020 project which is co-financed by the Eu-
ropean Union with the European Regional Develop-
ment Fund, the French state and the Hauts-de-France
Region Council.
REFERENCES
Al-Asadi, M. M., Duffy, A. P., Hodge, K. G., and Willis,
A. J. (2000). Twisted pair cable design analysis and
simulation. In 49th IWCS Symposium, pages 111–120.
Auzanneau, F. (2013). Progress In Electromagnetics Re-
search B, Vol. 49, 253–279, 2013. Progress In Elec-
tromagnetics Research, 49(February):253–279.
Corporation, G. C. T. (2017). Cord & Cordset Products for
industrial, commercial and specialty applications.
El Sahmarany, L. (2013). M
´
ethodes d’am
´
elioration pour
le diagnostic de c
ˆ
able par r
´
eflectom
´
etrie. PhD thesis,
Universit
´
e Blaise Pascal Clermont - Ferrand II.
F
¨
orstel, L. and Lampe, L. (2017). Grid diagnostics: Mon-
itoring cable aging using power line transmission. In
2017 IEEE International Symposium on Power Line
Communications and its Applications (ISPLC), pages
1–6. IEEE.
Furse, C., Chung, Y., Dangol, R., Nielsen, M., Mabey,
G., and Woodward, R. (2003). Frequency-domain
reflectometry for on-board testing of aging aircraft
wiring. Electromagnetic Compatibility, IEEE Trans-
actions on, 45:306 – 315.
Furse, C., Kafal, M., Razzaghi, R., and Shin, y.-j. (2020).
Fault diagnosis for electrical systems and power net-
works: A review. IEEE Sensors Journal, PP:1–1.
Galli, S. and Banwell, T. (2005). A novel approach to
the modeling of the indoor power line channel-part ii:
Transfer function and its properties. IEEE Transac-
tions on Power Delivery, 20(3):1869–1878.
Griffiths, L., Parakh, R., Furse, C., and Baker, B. (2006).
The invisible fray: A critical analysis of the use of re-
flectometry for fray location. Sensors Journal, IEEE,
6:697 – 706.
Hank, P., Vermesan, O., M
¨
uller, S., and Van Den Keybus,
J. (2013). Automotive ethernet: In-vehicle networking
and smart mobility. Proceedings -Design, Automation
and Test in Europe, DATE, pages 1735–1739.
Huo, Y., Prasad, G., Atanackovic, L., and Lampe, L. (2019).
Cable diagnostics with power line modems for smart
grid monitoring. IEEE Access, PP:1–1.
Kafal, M. and Benoit, J. (2018). Baselining: A critical
approach used for soft fault detection in wire net-
works. International Journal of Digital Information
and Wireless Communications (IJDIWC), 8:52–57.
Lallbeeharry, N., Mazari, R., D
´
egardin, V., and Trebosc, C.
(2018). Plc applied to fault detection on in-vehicle
power line. In 2018 IEEE International Symposium
on Power Line Communications and its Applications
(ISPLC), pages 1–5. IEEE.
Lindgren, A. and Chen, F. (2006). State of the art analy-
sis: An overview of advanced driver assistance sys-
tems (adas) and possible human factors issues. Hu-
man Factors and Economic Aspects on Safety, pages
38–50.
Mugala, G. (2005). High frequency characteristics of
medium voltage XLPE power cables. PhD thesis,
KTH.
Peres, P., Souza, C., and Bonatti, I. (2003). Abcd matrix: A
unique tool for linear two-wire transmission line mod-
elling. International Journal of Electrical Engineer-
ing Education, 40.
Ramo, S., Whinnery, J. R., and Van Duzer, T. (1994). Fields
and waves in communication electronics. John Wiley
& Sons.
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
88

Sanniyati, C., Arief, Y., Adzis, Z., Muhamad, N., Ah-
mad, M., Abu, M., Sidik, M. A. B., and Lau, K. Y.
(2016). Water tree in polymeric cables: A review.
Malaysian Journal of Fundamental and Applied Sci-
ences, 11:191–200.
Truong, T. K. (2000). Twisted-pair transmission-line dis-
tributed parameters. The Boeing CO.
Zimmermann, M. and Dostert, K. (1999). A multi-path sig-
nal propagation model for the power line channel in
the high frequency range. In Proc. IEEE Int. Symp.
Power Line Commun. Appl, pages 45–51. Lancaster,
UK.
Zimmermann, M. and Dostert, K. (2002). A multipath
model for the powerline channel. IEEE Transactions
on communications, 50(4):553–559.
Zweck, H. and Communication, E. A. (2019). 10 Mbps
Ethernet Technology and the Challenges Facing Au-
tomotive Microcontrollers.
Soft Fault Detection and Localization in an Unshielded Twisted Pair Network using Power Line Communication
89
