
Vegetation Detection in UAV Imagery for Railway Monitoring
Md Atiqur Rahman and Abdelhamid Mammeri
National Research Council Canada, Ottawa, Canada
Keywords:
Vegetation Detection on Railway Tracks, Drone-based Vegetation Detection, Image Semantic Segmentation.
Abstract:
Vegetation management on and alongside the railway tracks is very crucial for safe railway operations. The
railway industry, therefore, needs to regularly monitor the growth of vegetation on railway tracks and em-
bankments and mostly relies on human inspectors for the inspection and monitoring. This manual process
being prohibitively time-consuming and cost-ineffective, there is a growing need to automate the process of
vegetation detection. Aerial imagery collected using Unmanned Aerial Vehicles (UAVs) is becoming increas-
ingly popular for automated inspection and monitoring. On the other hand, due to their recent success, Deep
Convolutional Neural Networks (DCNNs) have seen rapid deployment in a wide array of image understand-
ing tasks. In this work, we therefore, investigate the effectiveness of DCNNs for automating the vegetation
detection task using UAV imagery. We further propose simple yet effective modification to an existing DCNN
architecture and demonstrate its efficacy for vegetation detection using publicly available dataset.
1 INTRODUCTION
Growth of vegetation on and alongside the railway
tracks presents potential hazards associated with the
railway operations and challenges the ability of en-
gineering forces to maintain safe track conditions.
Apart from causing hindrance to proper inspection of
the track structure and trains (CN, 2019), growth of
vegetation in the trackbed can clog the ballast caus-
ing poor track drainage which may eventually lead
to the collapse of the railway embankment (Briggs,
2010; Scott et al., 2007). It may also increase the
braking distance of the trains as it makes the tracks
slippery (Nyberg, 2016b). Therefore, the railway in-
dustry needs to regularly monitor, detect and control
the growth of vegetation in the ballast section and the
Rights-of-Way (ROW) to maintain safe functioning of
the train operations. Fig. 1 gives an overview of the
different zones around the rail tracks where vegeta-
tion management is needed.
In its current state, the railway industry mainly re-
lies on human inspectors who walk along the tracks
and judge for themselves the extent and condition of
vegetation growth on a regular basis. Apart from be-
ing expensive, such manual inspection is very time-
consuming specially for the Canadian railway net-
work that stretches from east coast to west coast.
Therefore, automating the process of vegetation de-
tection on and alongside the railway tracks is of ut-
most interest to the railway industry.
Figure 1: Different zones on and around the rail tracks
where vegetation management is needed. Image source CN
(2019).
The very limited body of research (e.g., (Nyberg,
2016b; Yella et al., 2013; Nyberg et al., 2013)) that
delves into automating (or, semi-automating) the pro-
cess of vegetation detection along railway tracks is
based on acquiring track images using service lo-
comotives equipped with trolley-mounted cameras.
However, such ground-based imagery has limited
Field of View (FOV) which may not be adequate
enough to capture all the Rights-of-Way as depicted
in Fig. 1. Besides, data collection for these methods
requires occupying the tracks, and therefore, could
hamper the regular train operations. Moreover, the
existing methods mostly rely on machine vision tech-
Rahman, M. and Mammeri, A.
Vegetation Detection in UAV Imagery for Railway Monitoring.
DOI: 10.5220/0010439904570464
In Proceedings of the 7th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2021), pages 457-464
ISBN: 978-989-758-513-5
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
457

niques and have not explored the effectiveness of the
recent sophisticated deep learning based image under-
standing algorithms, such as the Deep Convolutional
Neural Networks (DCNNs).
Compared to locomotive-mounted imagery, im-
ages captured using Unmanned Aerial Vehicles
(UAVs), or drones as they are more commonly
known, have very large FOV allowing one to analyse
large areas with sufficient surrounding context. Ad-
ditionally, drones offer flexible flying schedules with-
out obstructing regular train operations. On the other
hand, drone imagery provides substantially higher
level of details compared to other modes of aerial im-
agery (e.g., satellites). The geometric resolution of
drone imagery lies in the range of 2–5 cm as opposed
to 50–100 cm for satellite imagery. Drones therefore
provide for a more economical, fast and efficient ap-
proach to vegetation detection along the rail tracks.
This paper, therefore, focuses on vegetation detec-
tion in drone imagery. We are particularly inspired by
the recent success of the DCNNs that have already
proved to be a very powerful machine learning tech-
nique for a variety of image understanding tasks in-
cluding pixel-wise image semantic segmentation (Se-
ferbekov et al., 2018; Chen et al., 2018; Shelhamer
et al., 2017). To this end, we review some of the re-
cent DCNN architectures proposed for semantic im-
age segmentation and evaluate their efficacy for veg-
etation detection in drone imagery. Additionally, we
propose simple yet effective modification to an exist-
ing DCNN architecture that is shown to produce bet-
ter results on vegetation detection.
2 RELATED WORKS
2.1 Vegetation Detection on Railway
Tracks
To the best of our knowledge, there has been no
research conducted on vegetation detection on rail-
way tracks using drone-based imagery. The limited
body of research that addresses the problem is based
on ground-based imagery. An early work (Hulin
and Schussler, 2005) collected multi-spectral images
along railway tracks using locomotive-mounted cam-
eras and performed detection and measurement of
vegetation using spectral analysis. Other works (Yella
et al., 2013; Nyberg et al., 2013) applied machine vi-
sion techniques, such as color segmentation and mor-
phological operations to segment vegetation pixels on
the railway embankments. Roger Nyberg, in his sem-
inal thesis (Nyberg, 2016b), showed that machine vi-
sion algorithms are able to produce satisfactory re-
sults in quantifying the vegetation cover and classi-
fying the plant species as well. The same author in a
later work (Nyberg, 2016a) applied classical machine
learning approach (e.g., Bag-of-Features model) to
classify woody plants on railway trackbeds and em-
bankments. However, none of these works are based
on drone-based imagery nor explored the recent ad-
vanced machine learning algorithms such as, DCNNs
which is what motivates this work.
2.2 Drones for Visual Recognition
Though initially designed for military use, thanks to
their low-cost, flexible operations, and maneuverabil-
ity drones are now being used for commercial pur-
poses. The abundance of visual data collected us-
ing drone imagery coupled with the recent sophisti-
cated deep learning based algorithms has seen rapid
deployment in a wide range of applications. This
includes precision agriculture for crop monitoring
(Duarte-Carvajalino et al., 2018), crop yield estima-
tion (Wahab et al., 2018), and weed mapping (Huang
et al., 2018); security surveillance for person re-
identification (Grigorev et al., 2020), crowd counting
(K
¨
uchhold et al., 2018), and vehicle tracking (Song
et al., 2020); and search and rescue operations (Be-
jiga et al., 2017; Quan et al., 2019) for disaster and
crisis management.
The railway industry has recently started to capi-
talize drone imagery coupled with vision-based meth-
ods mainly for track extraction (Singh et al., 2019),
examining high-voltage electrical lines (Clark, 2020),
as well as inspecting railway catenary lines and the
alignment of tracks and switching points (THALES,
2019). However, drone-based vegetation detection on
railway tracks has not yet been explored. Therefore,
in this paper, we aim at detecting vegetation on and
alongside the railway tracks using drone imagery.
2.3 Image Semantic Segmentation using
DCNN
Given an input image, semantic segmentation aims at
assigning a class label to each pixel. The recent ad-
vancement in semantic segmentation has been mainly
driven by the huge success of the DCNNs. Long et
al., in his pioneering work (Shelhamer et al., 2017),
proposed a Fully Convolutional Network (FCN) that
has now become a de-facto DCNN architecture for
the recent semantic segmentation methods. Based on
FCN, Ronneberger et al. (2015) proposed a network
architecture called U-Net consisting of a contracting
path and a symmetric expanding path to capture the
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
458

Encoder
Decoder
ASPP
Figure 2: Architecture of FPN for segmentation (Seferbekov et al., 2018) (left) and DeepLabv3+ (Chen et al., 2018) (right).
Best viewed when zoomed in.
context, thereby achieving precise localization. To
handle multiple scales of objects, Seferbekov et al.
(2018) proposed a segmentation model that makes use
of the Feature Pyramid Network (Lin et al., 2017)
that capitalizes on multi-scale feature hierarchy. Chen
et al. (2017), on the other hand, proposed DeepLabv3
employing Atrous Spatial Pyramid Pooling (ASPP)
module based on dilated convolutions to capture fea-
tures at different scales. DeepLabv3+ (Chen et al.,
2018) further enhanced this architecture by introduc-
ing lateral connections in the decoder module and en-
joys the current state-of-the-art results on several seg-
mentation benchmarks.
3 METHODOLOGY
Since vegetation does not have regular shape and
structure, the vegetation detection problem is usually
formulated as an image semantic segmentation prob-
lem, where the goal is to label the vegetation pix-
els in the input image. In the following sections, we
describe two state-of-the-art DCNN architectures for
pixel-wise image semantic segmentation followed by
our proposed modified DCNN.
3.1 DCNN for Image Semantic
Segmentation
For the purpose of this work, we choose two state-of-
the-art semantic segmentation networks, namely, Fea-
ture Pyramid Network (FPN) for segmentation (Se-
ferbekov et al., 2018) and DeepLabv3+ (Chen et al.,
2018). The former won the DEEPGLOBE–CVPR
2018 land cover segmentation challenge from satel-
lite imagery, thus highly relevant to the task at hand.
On the other hand, DeepLabv3+ is the current state-
of-the-art method on several semantic segmentation
benchmarks.
3.1.1 Feature Pyramid Network (FPN) for
Segmentation
Fig. 2 (left) shows the architecture of the network pro-
posed in Seferbekov et al. (2018) that is based on the
Feature Pyramid Network (FPN) (Lin et al., 2017).
The network is composed of an encoder and a de-
coder. The encoder is basically having a bottom-up
pathway that receives an RGB image as input and
progressively downsamples the image in spatial di-
mensions using strided convolutions. The decoder, on
the other hand, follows a top-down pathway to pro-
gressively upsample the feature maps using bilinear
interpolation with lateral connections from the corre-
spondingly sized feature maps in the encoder module.
Once the feature pyramid is built, the channel dimen-
sion of the feature maps are reduced by using 3 × 3
convolutions and then upsampled using bilinear inter-
polation to match the size of the finest resolution fea-
ture map at the bottom. Finally, all these maps are
concatenated together along the channel dimension
followed by 1 × 1 convolution and spatial dropout to
produce class predictions which are again upsampled
to produce an output equal to the size of the input.
3.1.2 DeepLabv3+
The architecture of the DeepLabv3+ network is
shown in Fig. 2 (right). Unlike FPN, the encoder
of DeepLabv3+ is based on ASPP module that uses
atrous convolutions at different dilation rates (e.g., 6,
12, 18) along with image-level feature pooling to cap-
ture multi-scale features. These multi-scale feature
maps are then concatenated together followed by up-
sampling by a factor of 4 and then concatenated with a
higher resolution feature map extracted from the bot-
tom part of the encoder module. Finally, class predic-
tions are made on this combined feature map followed
by bilinear upsampling of the predictions to produce
the output.
Vegetation Detection in UAV Imagery for Railway Monitoring
459
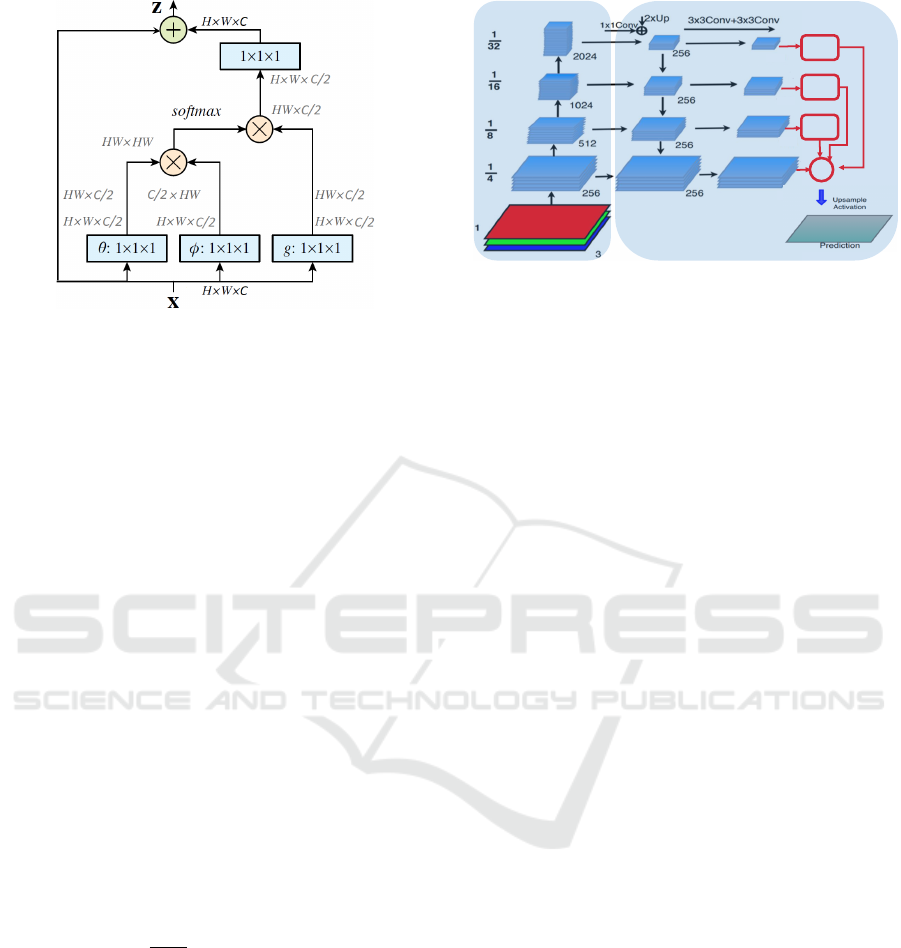
Figure 3: Architecture of non-local neural network (Wang
et al., 2018).
L
and
N
represent element-wise addition and
element-wise multiplication, respectively.
3.2 Non-local Neural Network (NNN)
for Semantic Segmentation
In this section, we describe the proposed modification
that is based on a novel work called Non-local Neu-
ral Network (NNN) (Wang et al., 2018). Although
the original work was proposed for video classifica-
tion, we repurpose it for the segmentation task by in-
corporating NNN in the FPN architecture. As aptly
reasoned in Wang et al. (2018), capturing long-range
dependencies is very important for any deep neural
networks. Since the convolution operation can only
capture local neighborhoods, we include NNN blocks
to allow the network to better capture the subtle con-
texts that may be present far from the current spatial
position.
An NNN block, as shown in Fig. 3, basically tries
to capture long range dependencies by computing the
response at a position as a weighted sum of the fea-
tures at all spatial positions in the input feature maps.
Mathematically, the non-local operation can be for-
mulated by the following equation.
y
i
=
1
C(x)
∑
∀
j
f (x
i
, x
j
)g(x
j
) (1)
where x is the input, y is the output, i is the index of
the output spatial position, j is the index that enumer-
ates all possible input spatial positions, and C(x) is a
normalization factor. The pairwise function f can be
formulated as follows.
f (x
i
, x
j
) = e
θ(x
i
)
T
φ(x
j
)
(2)
Here, θ and φ are two parameterized embedding func-
tions, such as θ(x
i
) = W
θ
x
i
and φ(x
j
) = W
φ
x
j
.
FPN with Non-local Neural Networks: Fig. 4
shows our proposed modification to the FPN architec-
ture. Instead of concatenating the final feature maps,
128
128
128
128
NNN
Block1
NNN
Block2
Upsample
by 8
Upsample
by 4
+
NNN
Block3
Upsample by 2
1x1 convolution
Encoder
Decoder
Figure 4: Modified architecture of FPN for segmentation.
We use non-local blocks on the top three feature maps and
combine all maps using element-wise addition. Best viewed
when zoomed in.
we pass the top three maps through individual NNN
blocks. For computational efficiency, we do not ap-
ply NNN on the finest resolution feature map. The
output of each of the NNN blocks are upsampled to
match the size of the bottom-most feature map and
combined with the bottom-most feature map using
element-wise addition. Finally, predictions are made
on the combined feature map followed by upsampling
(by a factor of 4) to match the size of the input.
4 EXPERIMENTAL SETUP
Currently, there is no benchmark publicly available
for vegetation detection on and alongside the railway
tracks using drone imagery. To circumvent this, we
evaluate the different methods discussed in Section 3
based on a publicly available benchmark for semantic
segmentation in drone imagery that depicts urban sce-
nario. We conjecture that methods that are successful
for vegetation detection in urban scenario can be read-
ily adapted to the rail context. This is supported by
the fact that rail tracks mainly pass through rural and
remote areas that have much less scene complexity
compared to the urban setting.
4.1 Dataset
We use a publicly available dataset called ‘Seman-
tic Drone Dataset’ (Graz University of Technology,
2020) that contains drone-imagery depicting urban
scenes having different objects including vegetation.
Fig. 5 shows an example image and the correspond-
ing annotation from the dataset.
The dataset contains 400 very high resolution
(4000 × 6000 pixels) drone imagery with polygo-
nal coarse annotations for 22 different object cate-
gories including ‘bald-tree’, ‘grass’, ‘tree’ and ‘other-
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
460

vegetation’. In this work, we are only interested in
these 4 classes while we consider the other classes
as background. The images are captured from nadir
view at an altitude of 5–30 m. Since the test set is
not publicly available, we split the 400 images into
train:test:validation sets following a 300:70:30 ran-
dom split, respectively.
4.2 Training Configurations
We first resize the images to 1000 × 1500 pixels for
faster inference. To increase the amount of train-
ing data, we perform various data augmentations in-
cluding affine transformations (e.g., scaling, rotation,
and shifting), color distortion and addition of Gaus-
sian noise. For all the models, we use the ResNeXt-
50(32x4d) (Xie et al., 2017) as the encoder network
pretrained on Imagenet dataset (Russakovsky et al.,
2015). Training is performed on random crops of
size 512 × 512 with a batch size of 8, whereas, infer-
ence is performed on the whole image (i.e., 1000 ×
1500). We train the different models using Adam
optimizer and the categorical cross-entropy loss with
class-weighting with an initial learning rate of 0.0001
which is reduced by a factor of 10 every 400 epochs.
Models are trained for a total of 1000 epochs, while
model selection is performed based on performance
on the validation set. All the models are trained us-
ing the publicly available library called ‘Segmenta-
tion Models Pytorch’ (Yakubovskiy, 2020).
4.3 Evaluation Metrics
To evaluate the performance of the different methods,
we use four performance metrics. The first one is
called mean Intersection over Union (mIoU) which
is usually used as the standard performance measure
for multi-class semantic segmentation. Additionally,
to evaluate the performance of the binary vegetation
segmentation task, we use three other measures –
Precision–Recall curve (PR curve), F-measure (F
β
)
curve, and Mean Absolute Error (MAE).
4.3.1 Mean Intersection over Union (mIoU)
As defined in Eq. 3, mIoU is defined as the mean
of the IoU’s for the different classes. IoU, on the
other hand, is defined as the intersection over union
between the ground-truth and the predicted object re-
gions. Equation 4 defines IoU.
mIoU =
1
C
C
∑
i=1
IoU
i
(3)
IoU =
T P
T P + FP + FN
(4)
Figure 5: Sample image (left) and the corresponding an-
notation (right) from the ‘Semantic Drone Dataset’ (Graz
University of Technology, 2020).
Here, C denotes the total number classes, whereas,
TP (true-positive), FP (false-positive) and FN (false-
negative) denote the total number of pixels correctly
predicted as vegetation, incorrectly predicted as veg-
etation, and incorrectly predicted as background, re-
spectively.
4.3.2 PR Curve
In the context of vegetation segmentation, precision
and recall can be defined as the fractions of the
predicted and ground-truth vegetation pixels, respec-
tively that are correctly predicted. Equation 5 defines
precision and recall. The PR curve can be generated
by plotting each (precision, recall) pair while varying
the classification decision threshold from 1 to 0.
Precision =
T P
T P + FP
Recall =
T P
T P + FN
(5)
where, TP, FP, FN denote the same as in Eq. 4.
4.3.3 F-measure Curve
As defined in Eq. 6, F-measure (F
β
) combines the
Precision and Recall into a single value, thus provides
a more comprehensive quantitative evaluation. The
F-measure curve can be generated by plotting the F
β
values for each pair of (precision, recall) as the clas-
sification decision threshold varies from 1 to 0. Apart
from the F-measure curve, we also report the maxi-
mum of F
β
values (max(F
β
)).
F
β
=
(1 + β
2
) × Precision × Recall
β
2
× Precision + Recall
(6)
Following Achanta et al. (2009), we set β
2
= 0.3 to
give more weight to Precision than Recall.
4.3.4 Mean Absolute Error (MAE)
MAE (Perazzi et al., 2012) denotes the average of the
per-pixel absolute differences between the ground-
truth and the predicted segmentation masks. Given
a dataset of N images, where each ground-truth mask
Vegetation Detection in UAV Imagery for Railway Monitoring
461

Table 1: Comparison of class-wise IoU (%) and mIoU (%)
(higher is better) on the test split. ‘Bkg’ stands for back-
ground.
bald-
tree
grass tree
other-
vegetation
Bkg mIoU
FPN 86.9 86.5 81.2 65.4 83.1 80.6
DeepLabv3+ 87.9 87.6 81.3 66.6 82.9 81.3
FPN w/ NNN 86.6 87.8 82.8 71.4 83.7 82.5
Table 2: Confusion matrix for FPN w/ NNN on the test
split. An entry at (x, y) denotes the percentage of pixels
belonging to object x that is classified as object y. ‘Bkg’
stands for background.
bald-
tree
grass tree
other-
vegetation
Bkg
bald-tree 88.4 3.1 0.0 3.0 5.5
grass 0.6 95.0 0.4 1.6 2.4
tree 0.3 0.8 88.4 9.5 1.0
other-vegetation 0.7 4.3 6.3 83.8 4.9
Bkg 0.2 0.6 0.4 3.2 95.6
(G) and the predicted mask (P) have spatial dimen-
sions of H ×W , the MAE can be defined as follows.
MAE =
1
N × H ×W
N
∑
n=1
H
∑
i=1
W
∑
j=1
|G
n
i, j
− P
n
i, j
| (7)
5 RESULTS
5.1 Multi-class Vegetation Segmentation
Table 1 reports class-wise IoU and the mIoU of FPN,
DeepLabv3+ and the proposed variant of FPN (i.e.,
FPN w/ NNN) across the different vegetation classes.
DeepLabv3+ performs better than FPN, which is in
agreement with the results on other segmentation
benchmarks reported in the literature. As we can
see, the proposed variant of FPN performs better
than the other two models (1.9 and 1.2 percentage
points higher mIoU than FPN and DeepLabv3+, re-
spectively), thereby demonstrating its superiority for
the multi-class vegetation detection task.
One observation is that, the IoU of the class
‘other-vegetation’ is consistently low across the dif-
ferent models when compared to the other classes. To
investigate into this, we show the confusion matrix
for the different vegetation classes in Table 2. As the
table reveals, the class ‘other-vegetation’ is confused
for ‘tree’ for 6.3% of the times, whereas, ‘tree’ is
confused for ‘other-vegetation’ for 9.5% of the times.
This clearly indicates that there exists high inter-class
similarity between these two classes in the dataset.
Figure 6: Example image (left) and the corresponding an-
notation (right) from the ‘Semantic Drone Dataset’ show-
ing high inter-class similarity between the classes ‘tree’ and
‘other-vegetation’. Best viewed when zoomed in.
Table 3: Comparisons of IoU(%) (higher is better), max (F
β
)
(higher is better), and MAE (lower is better) of the different
models on the test split. ‘Bkg’ stands for background.
Vegetation Bkg mIoU max(F
β
) MAE
FPN 89.7 95.1 92.4 0.930 0.052
DeepLabv3+ 91.1 96.4 93.8 0.936 0.047
FPN w/ NNN 92.2 95.6 93.9 0.942 0.044
We can confirm this by visually looking into the sam-
ple images and the corresponding annotations for the
two classes. As shown in Fig. 6, it is very difficult
even for a human to distinguish between these two
classes from a nadir view especially with the presence
of other artifacts such as, shadow and occlusion from
nearby objects.
5.2 Binary Vegetation Segmentation
For the purpose of vegetation detection on and along-
side the railway tracks, we do not need to distinguish
among the different vegetation classes. Hence, we
combine the different vegetation classes together as a
single semantic class called ‘vegetation’ and consider
everything else as background. Under this binary set-
ting, Table 3 compares the different models in terms
of IoU, max(F
β
), and MAE. As the table reveals, the
proposed modification is capable of providing perfor-
mance improvement across the different performance
metrics. This clearly demonstrates the efficiency of
the proposed modification for the vegetation detection
task. As observed in earlier experiments in Section
5.1, DeepLabv3+ performs better than FPN.
However, compared to the multi-class segmenta-
tion results as reported in Table 1, the IoU values for
all the models are improved under the binary segmen-
tation setting. This can be mainly attributed to the
fact that, with the merging of the different vegetation
classes, the high inter-class similarity that exists be-
tween the different vegetation classes (e.g., ‘tree’ and
‘other-vegetation’) is diminished as they are now con-
sidered the same class.
To further evaluate the quality of the predicted
segmentation masks, we plot PR and F-measure
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
462
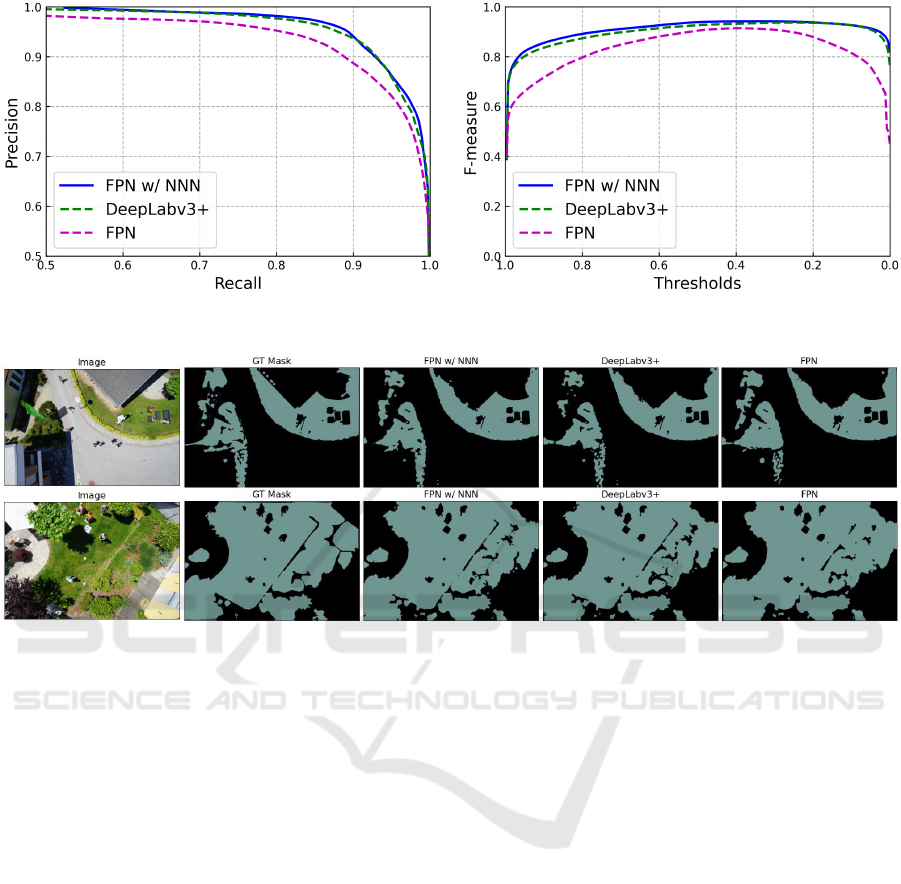
Figure 7: PR curves (left) and F-measure curves (right) for the different models. The proposed model FPN w/ NNN is capable
of producing higher area under the curves than the other models.
Figure 8: Some qualitative results on vegetation detection using the different models. Each row (from left to right) shows an
image from the test split, the ground-truth segmentation mask, and the predicted segmentation masks as produced by FPN
w/NNN, DeeLabv3+, and FPN, respectively. Best viewed when zoomed in.
curves for the different models as shown in Fig. 7.
The higher area under the curves as achieved by the
model FPN w/ NNN clearly indicates its superiority
for the binary vegetation segmentation task.
5.3 Qualitative Results
Fig. 8 shows some qualitative results achieved by
using the different models. As we can see, the pre-
dicted segmentation mask for FPN w/ NNN is qual-
itatively very close to the ground-truth segmentation
mask, thereby indicating its efficacy for the vegetation
detection task.
6 CONCLUSION
In this work, we demonstrate the effectiveness of
some state-of-the-art deep semantic segmentation
models for the task of vegetation detection from UAV
imagery. We additionally propose a modified DCNN
architecture to further improve the performance of the
vegetation detection task. Though the methods are
shown to work in an urban setting, they can be read-
ily adapted to vegetation detection on and alongside
the railway tracks. As a future work, we aim to col-
lect drone images on the railway tracks and test the
methods in a railway context.
REFERENCES
Achanta, R., Hemami, S., Estrada, F., and Susstrunk, S.
(2009). Frequency-tuned salient region detection. In
CVPR.
Bejiga, M. B., Zeggada, A., Nouffidj, A., and Melgani, F.
(2017). A convolutional neural network approach for
assisting avalanche search and rescue operations with
UAV imagery. Remote Sensing, 9(2).
Briggs, K. (2010). Charing Embankment: Climate Change
Impacts on Embankment Hydrology, pages 28–31.
Chen, L., Papandreou, G., Schroff, F., and Adam, H.
(2017). Rethinking atrous convolution for semantic
image segmentation. CoRR, abs/1706.05587.
Chen, L.-C., Zhu, Y., Papandreou, G., Schroff, F., and
Adam, H. (2018). Encoder-decoder with atrous sep-
arable convolution for semantic image segmentation.
In ECCV.
Vegetation Detection in UAV Imagery for Railway Monitoring
463

Clark, M. (03 July 2020 (accessed August 17, 2020)). The
Rise Of The Railway Drone.
CN (2019). Pest management plan for integrated vegetation
control, Canadian National Railway Company (CN)
pest management plan. 5-yearly plan, BC, Canada.
Duarte-Carvajalino, J., Alzate, D., Ramirez, A., Santa, J.,
Fajardo-Rojas, A., and Soto-Su
´
arez, M. (2018). Eval-
uating late blight severity in potato crops using un-
manned aerial vehicles and machine learning algo-
rithms. Remote Sensing, 10.
Graz University of Technology (2020). Semantic drone
dataset. http://dronedataset.icg.tugraz.at. Retrieved
2020-06-01.
Grigorev, A., Liu, S., Tian, Z., Xiong, J., Rho, S., and Feng,
J. (2020). Delving deeper in drone-based person re-
id by employing deep decision forest and attributes
fusion. ACM Trans. Multimedia Comput. Commun.
Appl., 16(1).
Huang, H., Deng, J., Lan, Y., Yang, A., Deng, X., and
Zhang, L. (2018). A fully convolutional network for
weed mapping of unmanned aerial vehicle (UAV) im-
agery. PLOS ONE.
Hulin, B. and Schussler, S. (2005). Measuring vegetation
along railway tracks. In Proc. 2005 IEEE Intelligent
Transportation Systems, pages 561–565.
K
¨
uchhold, M., Simon, M., Eiselein, V., and Sikora, T.
(2018). Scale-adaptive real-time crowd detection and
counting for drone images. In 2018 25th IEEE In-
ternational Conference on Image Processing (ICIP),
pages 943–947.
Lin, T., Doll
´
ar, P., Girshick, R., He, K., Hariharan, B., and
Belongie, S. (2017). Feature pyramid networks for
object detection. In CVPR.
Nyberg, R. (2016a). A machine learning approach for
recognising woody plants on railway trackbeds. In
Proc. of International Conference on Railway Engi-
neering (ICRE).
Nyberg, R., Gupta, N., Yella, S., and Dougherty, M. (2013).
Detecting plants on railway embankments. Journal of
Software Engineering and Applications, pages 8–12.
Nyberg, R. G. (2016b). Automating Condition Monitor-
ing of Vegetation on Railway Trackbeds and Embank-
ments. PhD thesis.
Perazzi, F., Kr
¨
ahenb
¨
uhl, P., Pritch, Y., and Hornung, A.
(2012). Saliency filters: Contrast based filtering for
salient region detection. In CVPR.
Quan, A., Herrmann, C., and Soliman, H. (2019). Project
vulture: A prototype for using drones in search and
rescue operations. In 2019 15th International Con-
ference on Distributed Computing in Sensor Systems
(DCOSS), pages 619–624.
Ronneberger, O., P.Fischer, and Brox, T. (2015). U-
Net: convolutional networks for biomedical image
segmentation. In Medical Image Computing and
Computer-Assisted Intervention (MICCAI), volume
9351 of LNCS, pages 234–241.
Russakovsky, O., Deng, J., Su, H., Krause, J., Satheesh,
S., Ma, S., Huang, Z., Karpathy, A., Khosla, A.,
Bernstein, M., Berg, A. C., and Fei-Fei, L. (2015).
ImageNet Large Scale Visual Recognition Challenge.
International Journal of Computer Vision (IJCV),
115(3):211–252.
Scott, J., Loveridge, F., and O’Brien, A. (2007). Influ-
ence of climate and vegetation on railway embank-
ments. In Geotechnical Engineering in Urban Envi-
ronments: Proceedings of the 14th European Confer-
ence on Soil Mechanics and Geotechnical Engineer-
ing, pages 659–664.
Seferbekov, S., Iglovikov, V., Buslaev, A., and Shvets, A.
(2018). Feature pyramid network for multi-class land
segmentation. In CVPR.
Shelhamer, E., Long, J., and Darrell, T. (2017). Fully con-
volutional networks for semantic segmentation. IEEE
Trans. Pattern Anal. Mach. Intell., 39(4):640–651.
Singh, A. K., Swarup, A., Agarwal, A., and Singh, D.
(2019). Vision based rail track extraction and mon-
itoring through drone imagery. ICT Express, 5(4):250
– 255.
Song, W., Li, S., Chang, T., Hao, A., Zhao, Q., and Qin,
H. (2020). Cross-view contextual relation transferred
network for unsupervised vehicle tracking in drone
videos. In WACV.
THALES (2019). How drones will change the fu-
ture of railways. https://www.thalesgroup.
com/en/worldwide/transport/magazine/
how-drones-will-change-future-railways. Retrieved
2020-08-17.
Wahab, I., Hall, O., and Jirstr
¨
om, M. (2018). Remote sens-
ing of yields: Application of UAV imagery-derived
NDVI for estimating maize vigor and yields in com-
plex farming systems in sub-saharan Africa. Drones,
2(3):28.
Wang, X., Girshick, R., Gupta, A., and He, K. (2018). Non-
local neural networks. In CVPR.
Xie, S., Girshick, R., Dollar, P., Tu, Z., and He, K. (2017).
Aggregated residual transformations for deep neural
networks. In CVPR.
Yakubovskiy, P. (2020). Segmentation models pytorch.
https://github.com/qubvel/segmentation
models.
pytorch.
Yella, S., Nyberg, R., Payvar, B., Dougherty, M., and Gupta,
N. (2013). Machine vision approach for automating
vegetation detection on railway tracks. Journal of In-
telligent Systems, pages 179–196.
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
464
