
A Survey on Decentralized Cooperative Maneuver Coordination
for Connected and Automated Vehicles
Daniel Maksimovski
a
, Andreas Festag
∗ b
and Christian Facchi
c
Technische Hochschule Ingolstadt/ CARISSMA, Esplande 10, Ingolstadt, Germany
Keywords:
V2X Communications, Cooperative Driving, Maneuver Coordination, Automated Vehicle.
Abstract:
V2X communications can be applied for maneuver coordination of automated vehicles, where the vehicles
exchange messages to inform each other of their driving intentions and to negotiate for joint maneuvers.
For motion and maneuver planning of automated vehicles, the cooperative maneuver coordination extends
the perception range of the sensors, enhances the planning horizon and allows complex interactions among
the vehicles. For specific scenarios, various schemes for maneuver coordination of connected automated
vehicles exist. Recently, several proposals for maneuver coordination have been made that address generic
instead of specific scenarios and apply different schemes for the message exchange of driving intentions and
maneuver negotiation. This paper presents use cases for maneuver coordination and classifies existing generic
approaches for decentralized maneuver coordination considering implicit and explicit trajectory broadcast,
cost values and space-time reservation. We systematically describe the approaches, compare them and derive
future research topics.
1 INTRODUCTION
Automated and self-driving vehicles have the poten-
tial to reshape the automotive industry and mobility
by improving the traffic safety and efficiency. In the
last two decades, the research and development of ad-
vanced driver-assistance systems (ADAS) and auto-
mated driving functions have seen a huge increase,
both in industry and academia.
Automated driving relies on on-board sensors that
perceive the environment. Their limitations can be
overcome by Vehicle-to-Everything (V2X) commu-
nications. V2X communication offers the possibil-
ity to extend the perception range and enhance the
sensing of the vehicles by having a better represen-
tation of the environment. By exchanging driving
intentions among vehicles, planning algorithms can
enlarge their planning horizon and rely on direct in-
formation from other vehicles instead of predicting
their behavior based on local sensor data. Finally,
V2X communication allows for maneuver negotia-
tion based on a bidirectional message exchange po-
a
https://orcid.org/0000-0002-3414-1069
b
https://orcid.org/0000-0001-5254-6425
c
https://orcid.org/0000-0002-7762-9419
∗
Also with Fraunhofer Application Center for Connected
Mobility and Infrastructure, Ingolstadt, Germany.
tentially with complex interactions.
V2X communication comprises the communica-
tion among vehicles, with pedestrians, the roadside
infrastructure and networks. After several years of
research, development and standardization, two ac-
cess technologies are available for safety and traffic
efficiency applications, i.e., WLAN-V2X (or ITS-G5
in Europe) and Cellular-V2X (Sj
¨
oberg et al., 2017;
Molina-Masegosa and Gozalvez, 2017). Both oper-
ate in the 5.9 GHz frequency band allocated for road
safety and traffic efficiency applications and enable a
direct ad hoc communication among vehicles applica-
ble for maneuver coordination.
The deployment of the V2X communications can
be divided in three subsequent phases, in which ap-
plications with an increasing level of complexity and
communication requirements are (or will be) imple-
mented. In the first phase, “Day-1” applications
exchange vehicle state information (position, speed,
etc.) and share the occurrence of dangerous situa-
tions. They primarily cover applications for driver in-
formation and warning. In the European V2X com-
munication system, these applications use the peri-
odically broadcast Cooperative Awareness Message
(CAM) (ETSI EN 302 637-2)
1
and the event-driven
Decentralized Environmental Notification Message
1
ETSI standards are available at http://etsi.org.
100
Maksimovski, D., Festag, A. and Facchi, C.
A Survey on Decentralized Cooperative Maneuver Coordination for Connected and Automated Vehicles.
DOI: 10.5220/0010442501000111
In Proceedings of the 7th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2021), pages 100-111
ISBN: 978-989-758-513-5
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Figure 1: Classification of approaches for decentralized generic maneuver coordination.
(DENM) (ETSI EN 302 637-3). In the second phase,
the “Day-2” applications rely on sharing of sensor
data; more precisely on the exchange of detected ob-
jects in a vehicle’s vicinity with the Collective Per-
ception Messages (CPM), which is currently being
standardized in ETSI (ETSI TR 102 562). In the
third phase, the main emphasis is on the coopera-
tive maneuver coordination between Connected and
Automated Vehicles (CAVs). This coordination ex-
tends the other communication services by dedicated
messages for the communication of the vehicle’s ma-
neuver intentions. While being a research topic, ma-
neuver coordination is already considered in the early
standardization process (e.g., draft ETSI TR 103 578).
Cooperative maneuver coordination aims at utiliz-
ing V2X communication for the coordination of ma-
neuvers among vehicles in order to achieve safe and
efficient driving. During this process, the involved
CAVs exchange maneuver intentions that influence
their driving behavior and agree on cooperative joint
maneuvers based on each other needs in a negotiation
phase with a defined number of coordination mes-
sages. The sharing of the intentions and coordination
of maneuvers among the CAVs is expected to enhance
the automated driving by avoiding conflicts or colli-
sion risks, and bring the deployment of fully driver-
less vehicles closer to reality.
Existing coordination approaches can mainly be
categorized in two ways. The first one separates
them into centralized and decentralized approaches.
Centralized approaches have a central system that re-
ceives all the information and communicates the ma-
neuvers with the respective vehicles. The decentral-
ized approach does not consider a global planner en-
tity, but is solely based on communication and coor-
dination among the involved participants which can
also consider a roadside unit (RSU). A hybrid ap-
proach considers both, the coordination among the
CAVs and using a centralized system (typically RSU)
to create a global plan for the vehicles. The other
way of categorization is by implicit and explicit co-
ordination. In implicit coordination, the CAVs share
their intentions and desired maneuvers periodically
and have to deduce from the changed intentions of
the other CAVs whether their proposal has been ac-
cepted or not. Explicit coordination considers an ex-
plicit agreement with dedicated messages among the
vehicles to perform an acknowledged maneuver in an
event-based manner.
The present paper analyzes the state-of-the-art
for decentralized maneuver coordination that involves
only communication among the vehicles and does
not include the RSUs. Considering the existing
generic coordination approaches that are applicable
to a wide range of scenarios, we classify them into
four categories (Figure 1): Implicit Trajectory Broad-
cast (ITB), Explicit Trajectory Broadcast (ETB), Im-
plicit Trajectory Broadcast with Cost Values (ITB-
CV) and Space-Time Reservation (STR). For each
category, we present and analyze the respective publi-
cation. Then, we compare these approaches and ana-
lyze commonalities and differences. From the review
of the existing approaches, we derive future research
topics. We regard our systematic review as a contri-
bution for further research, standardization and devel-
opment of maneuver coordination for connected auto-
mated driving.
The remainder of the paper is structured as fol-
lows. Section 2 presents cooperative driving use cases
that benefit from maneuver coordination. The cate-
gories and the selected approaches for decentralized
maneuver coordination are described in Section 3,
followed by their discussion and comparison in Sec-
tion 4, and a presentation of future research topics in
Section 5. Section 6 concludes the paper.
2 USE CASES FOR MANEUVER
COORDINATION
Cooperative driving brings many advantages for the
automated vehicles to achieve more comfortable,
safer and more efficient driving, as well as to opti-
mize the traffic flow. It allows coordination of the
maneuvers in more specific use cases that can cause
conflicted and collision risk situations for the con-
ventional and automated vehicles. Several coopera-
tive use cases, where V2X communications can bring
benefits and enable maneuver coordination, have been
A Survey on Decentralized Cooperative Maneuver Coordination for Connected and Automated Vehicles
101
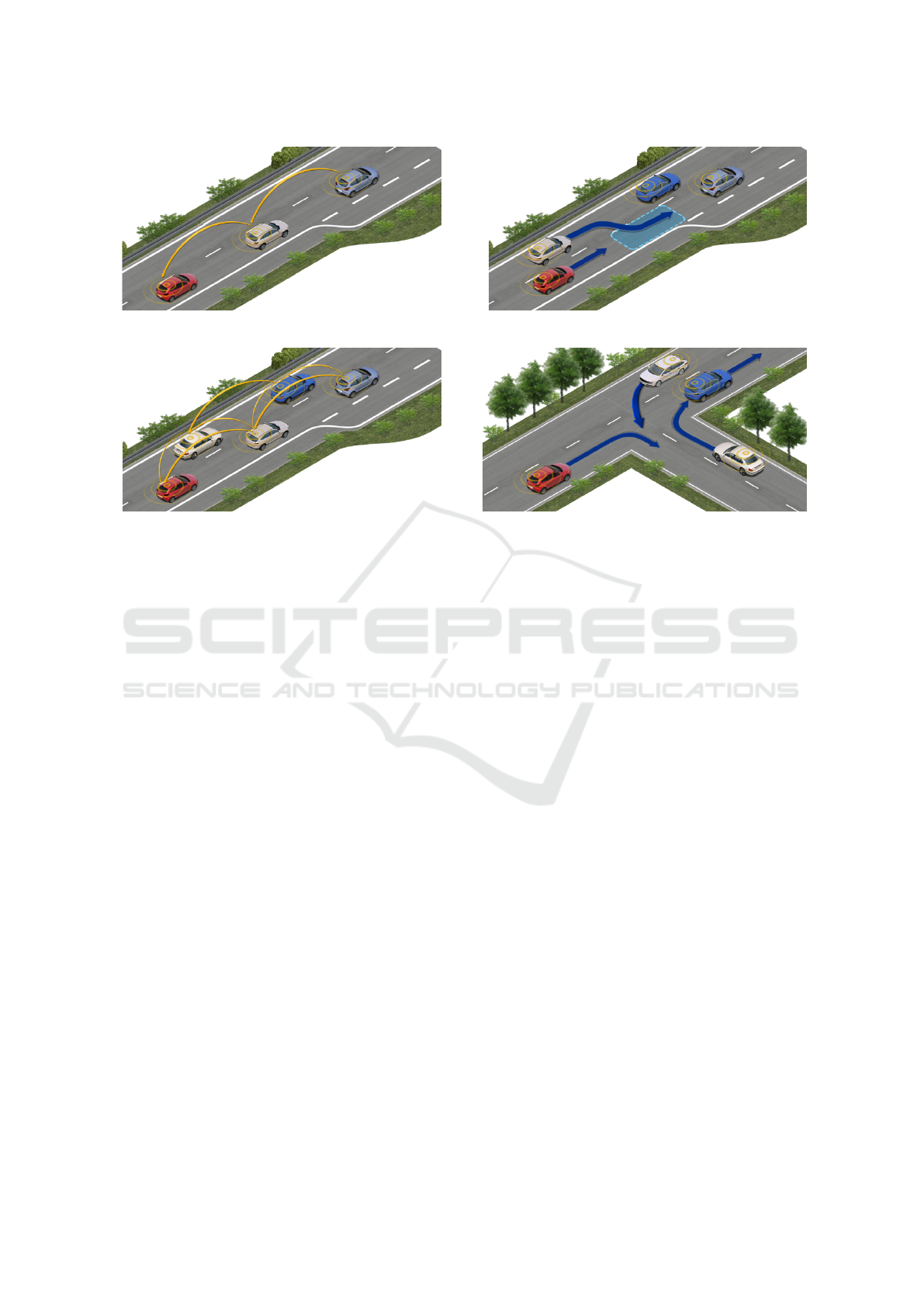
Figure 2: Cooperative ACC.
Figure 3: Cooperative driving in a convoy.
identified e.g., by the R&D projects AutoNet2030 and
IMAGinE (Hobert et al., 2015; Llatser et al., 2019),
and are summarized as follows:
Cooperative-ACC (C-ACC). This use case extends
and improves the Adaptive Cruise Control (ACC) that
allows the vehicles to exchange additional informa-
tion using V2X to synchronize their velocities and
avoid more frequent acceleration and braking and in
the worst case, prevent critical situations (Figure 2).
C-ACC can also be used to enable platooning.
Cooperative Driving in a Formation. Vehicles driv-
ing in a platoon or convoy are considered as part of
formation driving. A platoon represents a group of
vehicles in a same lane on a highway, usually truck
platoons, that drive together in a stable formation
keeping small distances between each other, hence
increasing the road capacity, traffic comfort and ef-
ficiency. A platoon has a master, typically the lead-
ing vehicle, that coordinates maneuvers with the other
vehicles and manages the platoon. Vehicles in a sin-
gle or multi-line convoy (Figure 3) is another way to
group the vehicles on highways. Instead of having
a group leader, the vehicle control is distributed over
all group vehicles in longitudinal and lateral direction
resulting in vehicle disturbances affecting all of the
convoy participants to a different extent; hence creat-
ing a stable formation. In a convoy, the vehicles only
need the neighboring vehicles’ dynamics information.
Cooperative Lane Change. In a cooperative lane
change situation, the vehicles share their planned ma-
neuver intentions and coordinate each other to suc-
cessfully change the lane (Figure 4). The cooperative
Figure 4: Cooperative lane change.
Figure 5: Cooperative driving at junction.
lane change maneuver can be executed between two
vehicles or within a group of few vehicles in a safe
and efficient manner.
Cooperative Driving in Non-signalized
Intersections or Junctions. In intersections and
junctions without signalization, CAVs can coordinate
each other by exchanging their planned intentions
and safely execute turning maneuvers (Figure 5).
Cooperative Overtaking. Cooperative overtaking is
especially important on rural roads (Figure 6). Vehi-
cles can exchange and coordinate their future planned
trajectories to avoid a conflicted overtaking situation.
It can also be exploited by heavily loaded trucks on
highways to exchange their planned speed and current
weight for optimal coordination.
Cooperative Lane Merging. Lane merging is a com-
mon maneuver on highways. Lane merging also oc-
curs at construction site on the road. By exchanging
their intentions, vehicles can assist each other to coor-
dinate their merging maneuvers in a safe and efficient
way (Figure 7).
Infrastructure-controlled Cooperative Driving.
The infrastructure can plan the traffic distribution
to optimize the traffic flow and exchange the global
driving plan with the CAVs in different traffic
situations. It can be used for traffic intersection
management in both signalized and non-signalized
intersections or junctions to optimize the traffic lights
and to manage the intersection passing of each CAV,
respectively (Figure 8). The infrastructure control
can also be used to coordinate the cooperative lane
merging.
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
102
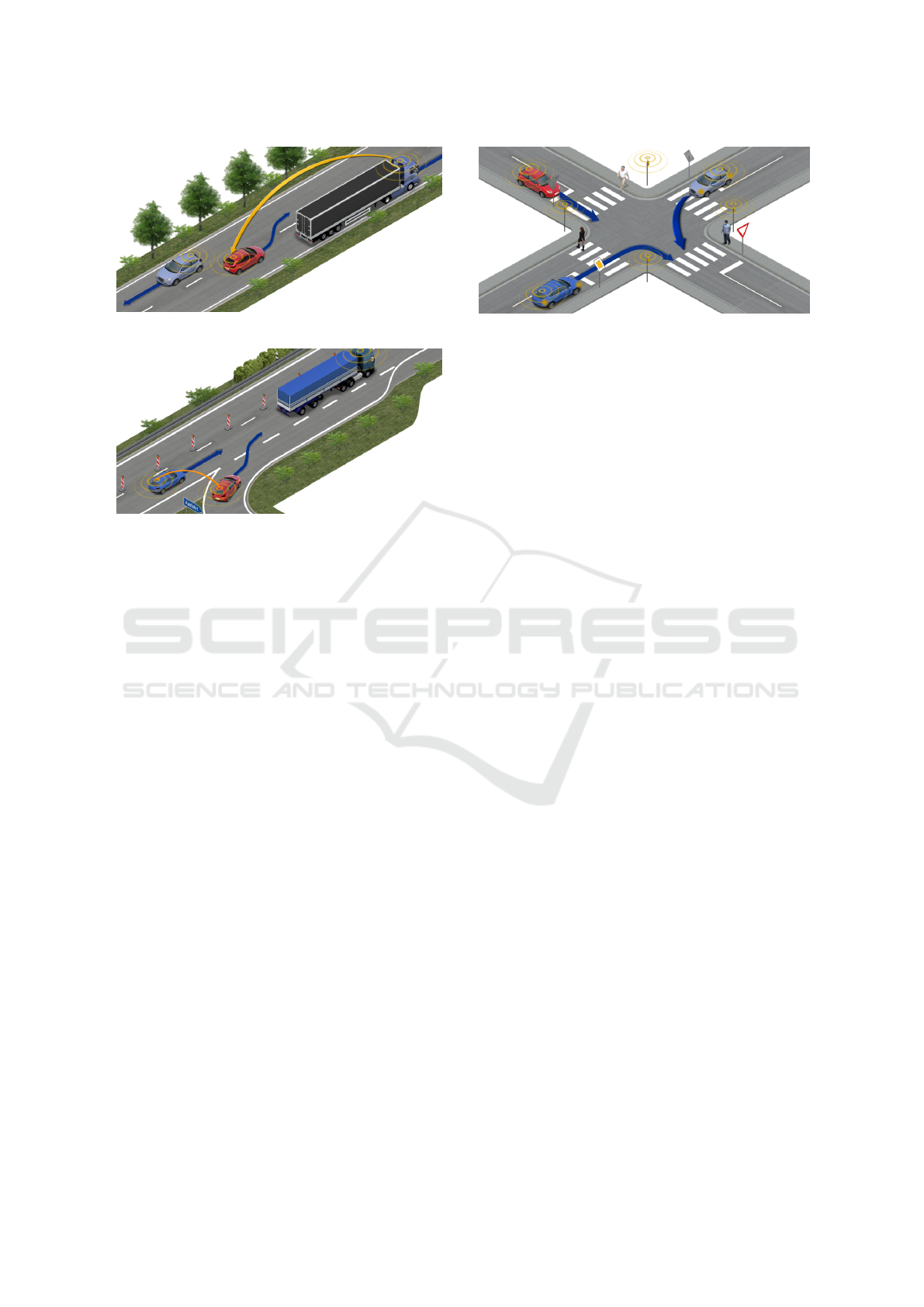
Figure 6: Cooperative overtaking.
Figure 7: Cooperative lane merging.
3 DECENTRALIZED MANEUVER
COORDINATION
In this context, the decentralized maneuver coordina-
tion depends solely on the communication among the
CAVs to negotiate cooperative maneuvers. Further-
more, the coordination can be categorized into use
case-specific and generic. In a use case-specific co-
ordination, a coordination application is required that
focuses only on one specific traffic situation, such as
the ones presented in Section 2, and uses protocol
only relevant to the respective use case. Generic co-
ordination aims at using one protocol to solve all co-
operative driving use cases.
3.1 Use Case-specific Coordination
Approaches
In order to solve the different traffic situations among
the traffic participants as described in Section 2,
a large number of research publications have con-
tributed to various coordination protocols for spe-
cific use cases. Platooning (Vukadinovic et al., 2018)
and C-ACC (Dey et al., 2016), which are based on
longitudinal coordination and utilize communications
among the vehicles, have been extensively investi-
gated and numerous publications on their character-
istics and control are available. Cooperative lane
changing and merging situations require lateral and
longitudinal coordination as vehicles also need to ac-
Figure 8: Cooperative intersection.
celerate or decelerate in order to create the needed
gap. Decentralized convoy driving allows the mem-
bers of a convoy to keep a stable formation by ad-
justing their longitudinal and lateral dynamics and
performing lane change maneuvers (Marjovi et al.,
2015). Cooperative lane change service outside of a
convoy as proposed in (Hobert et al., 2015) consists
of a search, preparation and execution phase. The ser-
vice supports maneuver negotiations and space reser-
vations using dedicated broadcast lane change mes-
sages, i.e., request, response, prepared or abort mes-
sages in each of the three phases. C-AAC can also
be used to achieve lane change and merging coor-
dination, see (Bevly et al., 2016) for an overview.
Distributed cooperative intersection and roundabouts
management without the need for infrastructure sup-
port is analyzed in (Chen and Englund, 2016), dis-
cussing distributed resource reservation protocols us-
ing different message sets. Instead of use case-
specific approaches, the review of the present paper
focuses on generic approaches which will be pre-
sented next.
3.2 Generic Coordination Approaches
The generic decentralized coordination represents
more recent state-of-the art approach considering ma-
neuver coordination protocols that are independent
of specific use case applications. They represent the
most promising concepts for maneuver coordination
and are presented in more detail in this work. Two
types of implicit and explicit coordination protocols
are discussed, as well as a hybrid approach incorpo-
rating infrastructure support for an already defined
distributed protocol. The same lane merging sce-
nario is used to describe the different protocol pro-
posals consisting of four CAVs. The vehicles broad-
cast messages which consist of planned (PT), desired
(DT), alternative (AT) and requested (RT) trajecto-
ries, as well as space-time reservation (STR). It is im-
portant to mention that details of how the aforemen-
tioned trajectories are planned and generated are not
explained in the publications on trajectory broadcast
A Survey on Decentralized Cooperative Maneuver Coordination for Connected and Automated Vehicles
103

(a) Desired trajectory request
(b) Desired trajectory accepted
Figure 9: Maneuver coordination process in ITB.
approaches. In order to differentiate the unnamed dif-
ferent approaches, each of them is given a name and
the corresponding abbreviations are used to address
them (Figure 1).
3.2.1 Implicit Trajectory Broadcast (ITB)
The first generic maneuver coordination protocol was
proposed by (Lehmann et al., 2018). It defines a new
message type, i.e., the Maneuver Coordination Mes-
sage (MCM) that carries trajectory information. In
the MCM, the data elements for trajectories are rep-
resented as Fren
´
et frames; a format that is commonly
used for trajectories along a geometric shape. The ve-
hicles periodically broadcast their planned trajectories
(PT) and optionally a desired trajectory (DT). The lat-
ter represents an alternative, more preferred trajectory
that is currently hindered by another vehicle due to the
right-of-way rules. In order to complete the maneuver
coordination, this work identifies the following three
phases: detection, negotiation and execution.
Considering the lane merging scenario in Figure 9,
vehicle A detects the need for a lane merging maneu-
ver and shares its DT that currently intersects with the
PT of vehicle B (Figure 9a); in this way the negotia-
tion phase is started. After its own assessment, vehi-
cle B decides whether to accept or ignore the request.
In this situation, B accepts, adapts and broadcasts its
new PT. This enables the requesting vehicle A to exe-
cute its DT, which is now adapted into PT (Figure 9b).
In this implicit approach, the accepting vehicle ac-
knowledges that it accepts the requested DT by broad-
casting its new adapted PT, but does not explicitly re-
fer to a specific request. It is also required that each
(a) REQUEST and PROMISE
(b) CONFIRM
Figure 10: Maneuver coordination process in ETB.
vehicle that receives the DT broadcast has to deter-
mine whether its future planned maneuver intersects
this trajectory or not. In this situation, vehicles C and
D do not intersect the DT.
3.2.2 Explicit Trajectory Broadcast (ETB)
The idea of ITB was extended with a concrete explicit
coordination protocol that is also based on the princi-
ple of detection, negotiation and execution (Xu et al.,
2019). The emphasis is on the negotiation protocol,
which introduces a set of three message types: RE-
QUEST, PROMISE and CONFIRM. These messages
can be considered as MCM types and are broadcast
during the negotiation phase. They can carry multi-
ple trajectories in parallel, in contrast to ITB that con-
siders only one trajectory at a time. The protocol is
explained in the lane merging scenario in Figure 10
and the messages are also numbered to indicate their
order.
After vehicle A detected a need for cooperation, it
broadcasts a REQUEST message, which can consist
of multiple DTs. Multiple requests to different vehi-
cles are possible, too. In this situation, vehicles B and
C hinder this DT and after the DT request is received,
they decide whether to accept it or not. If the accept-
ing vehicles are able to plan collision-free trajectories,
they can send multiple alternative trajectories (AT) in
a PROMISE message (Figure 10a). The requesting
vehicle A constructs a collision-free global plan for all
of the participants and sends it via a CONFIRM mes-
sage. After that, in order to execute the desired ma-
neuver, the requesting vehicle needs one more broad-
cast message from the accepting vehicles that shows
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
104

that the vehicles adapted the promised PTs. If the ac-
cepting vehicles adapt their PTs as promised, the co-
ordination process is successful (Figure 10b), other-
wise after a certain timeout the requesting vehicle can
abort the coordination if one or all of the participating
vehicles are not able to adapt their promised PTs be-
cause of different reasons. The vehicles are also not
allowed to send different PROMISE and CONFIRM
messages within a certain period of time. In this way,
the protocol prevents potential ambiguities and risk of
divergence, which means that vehicles will not end up
choosing contradictory plans.
(Xu et al., 2019) also discuss communication fail-
ures, since the protocol does not assume a reliable
message transmission. In case of message loss, the
most important message is the CONFIRM message.
If any communication failure happens before, none of
the vehicles are going to change their trajectories. The
only problem can arise if the CONFIRM message is
delivered to a subset of vehicles. In the described sce-
nario, if the message is delivered to B, but not to C, B
will be the only vehicle to change the trajectory. This
can cause overhead but will not lead to a worse situa-
tion because the PROMISE and CONFIRM messages
have the requirement that only collision-free trajecto-
ries can be included.
3.2.3 Implicit Trajectory Broadcast with Cost
Values (ITB-CV)
(Llatser et al., 2019) propose an implicit coordina-
tion approach by periodically exchanging trajectories
with cost values. Similar to ITB, it relies on MCM as
the message type but assigns the cost values as addi-
tional trajectory attributes that express the necessity
and willingness of the CAVs for cooperation. The
proposed MCM format consists of three containers
describing the basic message information, the cur-
rent position of the vehicle and the trajectory infor-
mation. The cooperation protocol is explained in the
lane change scenario in Figure 11.
The protocol considers three different types of
trajectories: reference (PT), alternative (AT) and re-
quested (RT) trajectory. Each CAV sends its PT with
a cost value, representing its future planned trajectory.
In this situation, the PT of vehicle A has a cost value
C = 0.7. This means, A has a necessity to cooper-
ate since C > 0. The PT of the vehicle B has a cost
value of −0.2, indicating it is willing to cooperate
with other vehicles, because C < 0. If C = 0, the
vehicle does not have a necessity nor willingness to
cooperate. B sees the need of A and offers two ATs
with cost values 0.3 and 0.5 (Figure 11a). By defi-
nition, these costs are higher than the reference cost
because in order to execute them, a coordination is
(a) Alternative trajectories offer
(b) Trajectories request
(c) Request accepted
Figure 11: Maneuver coordination process in ITB-CV.
necessary. After A receives the ATs which represent
an offer from B, it sends two RTs with high willing-
ness costs: −1.0 and −0.8 (Figure 11b). The accept-
ing vehicle B constructs a global plan for both vehi-
cles by selecting its own trajectory and the trajectory
for the requesting vehicle A that gives the lowest to-
tal cost. Finally, the selected trajectories are adapted
as PTs and the cooperation is successfully completed
(Figure 11c).
3.2.4 Space-Time Reservation (STR)
The space-time reservation protocol (Heß et al., 2018;
Nichting et al., 2019; Heß et al., 2019) is a different
approach than ITB and ETB. It is not based on trajec-
tories exchange and request, but rather on an explicit
reservation of position and time constraints among the
communicating vehicles. This work merges a nom-
inal maneuver planner for autonomous driving with
a cooperative driving protocol. The space-time con-
straints are only exchanged once the need for cooper-
ation is identified using the containers of a CAM mes-
sage, hence using fewer messages with simple reser-
vation encoding.
A Survey on Decentralized Cooperative Maneuver Coordination for Connected and Automated Vehicles
105

(a) STR request
(b) STR accepted
Figure 12: Maneuver coordination process in STR.
In the lane change scenario in Figure 12, vehicle
A sends a REQUEST message that consists of the
STR constraints set with the following parameters:
position where the reservation should start, length
of the reserved area, time interval, velocity, ID of
the requesting vehicle and a reference to the corre-
sponding request (Figure 12a). If the accepting ve-
hicles can plan a collision-free maneuver incorporat-
ing these constraints, they send a COMMIT message
(Figure 12b). A REJECT message is sent if the vehi-
cles can not or does not want to accept the request. In
case the plans for the requesting vehicle changed, it
can also cancel the request. Figure 12 shows the tra-
jectories for better visibility; we note that they are not
periodically broadcast among the vehicles.
3.2.5 Infrastructure Support for Decentralized
Coordination
(Correa et al., 2019) present an enhancement of the
proposed ITB approach to consider infrastructure
support. Road side unit (RSU) information is in-
cluded in the MCM format alongside the proposed
trajectories exchange information between the vehi-
cles. In this way the infrastructure can support the
CAVs by offering advice on proposed speed, gap, lane
or transition of control between the automated system
and the driver using vehicle-to-infrastructure commu-
nications (Figure 8). This approach can lead to a more
neutral coordination, enhanced perception and coor-
dination involving multiple vehicles in specific traffic
situations.
4 COMPARISON OF
APPROACHES
Table 1 shows a comparison of the presented decen-
tralized generic approaches using different criteria.
Since results from a performance evaluation are not
available for all of the described approaches or – if
available – the results are not comparable, the com-
parison is based on the conceptual design of the pro-
posed coordination protocols and on an analysis of
their advantages and shortcomings.
The ITB approach (Lehmann et al., 2018) brings a
lot of novelties, in particular the broadcast of planned
and desired trajectories, Maneuver Coordination Ser-
vice with Maneuver Coordination Messages focusing
only on the exchange of trajectories, as well as using
the Fren
´
et frames as standardized way to represent the
trajectories. However, considering more vehicles, this
protocol can result in ambiguities due to its implicit-
ness. In a situation with only two vehicles, the pro-
tocol can still cause conflicts due to the fact that it is
not known if the accepting vehicle changes its PT due
to the given request or because of another request. It
is also a serial coordination approach, meaning that at
a time the vehicles can only negotiate one trajectory.
This brings advantage in terms of reducing the motion
planning system complexity. However, a successful
coordination might require several requests, meaning
longer time to find an acceptable DT. Considering all
these aspects, this concept stands as a solid basis for
cooperative maneuver coordination.
ETB (Xu et al., 2019) further improves the ETB
approach by proposing an explicit coordination with
a defined number of negotiation messages that limits
communication failures and eliminates protocol am-
biguities. The approach also considers negotiation of
multiple trajectories and cooperation between more
than two vehicles. However, due to the higher number
of negotiation messages, the probability of communi-
cation failures is also increased.
The ITB-CV approach (Llatser et al., 2019) brings
an additional information to the trajectories by us-
ing cost values that help the requesting vehicles to
show the extent of their need for cooperation. It also
helps the accepting vehicle to decide whether to ac-
cept or reject a given request. However, the addition
of a cost value to each reference trajectory results in
a higher algorithmic complexity for the motion plan-
ning system, as it needs to be computed at each time
step. Since it is an implicit approach, the coordina-
tion process introduces the same ambiguities as in the
ITB approach. Also, compared to ETB, the impact
of communication failures will be larger because the
message losses can cause further ambiguities too.
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
106

Table 1: Comparison of generic approaches for decentralized maneuver coordination (BC = Broadcast, TR = Trajectory).
ITB ETB ITB-CV STR
(Lehmann et al., 2018) (Xu et al., 2019) (Llatser et al., 2019) (Heß et al., 2018)
Coordination type implicit explicit implicit explicit
Serial or parallel serial parallel parallel parallel
Number of vehicles 2 more than 2 2 more than 2
Communication type periodic BC periodic BC periodic BC non-periodic BC
Message type MCM MCM MCM CAM
Number of messages 2 4 3 2
Request method desired TR desired TR requested TR space-time
Protocol ambiguities yes no yes no
Impact of comm. failures yes limited yes limited
Simulation results no yes no yes
Experimental results no no no yes
A reservation of position and time constraints pro-
posed by the STR approach (Heß et al., 2018) offers
certain flexibility as – in contrast to the other trajec-
tory request approaches – the requesting vehicle can
modify its planned trajectory within the reserved area.
The other main difference is the fact that the nego-
tiation is simpler because the accepting vehicles do
not broadcast their maneuver intentions. Once the ac-
cepting vehicles commit to the request, for the given
time they cannot intersect the requested constraints.
(Heß et al., 2018) is also the only publication that in-
tegrates the coordination process with an automated
motion planning system and validates the approach in
a real test environment using real test vehicles. Fur-
thermore, it is the only approach that uses an extended
CAM message only when the coordination need is de-
tected, hence requires the lowest bandwidth which is
another advantage in comparison with the other ap-
proaches that propose the periodic broadcast of a sep-
arate MCM message.
The first three approaches utilize the broadcast of
trajectories, which improves the prediction system of
the CAVs. The best prediction of the other vehicles
movements is using their shared planned trajectory,
which reduces the uncertainty and improves the safety
in many difficult or critical situations. By knowing
the intentions of the other vehicles, the CAVs will be
able to solve many situations. Disadvantages come
with the high data rate of periodic broadcasting and
the many implementation and communication issues
that need to be solved. The possibility to find a faster
and more suitable solution increases with the parallel
approaches that allow negotiation of multiple trajec-
tories at a time between the vehicles; however the al-
gorithmic complexity of the motion planning system
also grows.
The implicit approaches might be an easier solu-
tion to implement in a simpler case with only two co-
operating vehicles because more difficult situations or
more vehicles can bring various protocol and com-
munication failure ambiguities. In comparison, the
explicit approaches allow coordination between more
vehicles with limited impact of the communication
failures and no protocol ambiguities which makes it a
much safer solution that prevents conflicted situations
and additional risks. To enable fast, safe, efficient and
unambiguous coordination for the cooperative vehi-
cles, the type and number of negotiation messages
play a crucial role. Table 1 shows the minimum re-
quired messages that allow the requesting vehicle to
execute the desired maneuver. This considers that the
coordination succeeds at first try and all messages are
broadcast only once. The negotiation protocol pro-
posed in the ETB approach enables safe and unam-
biguous coordination with multiple options and more
than two included vehicles, but it also requires the
largest number of exchanged messages. The STR ap-
proach allows for fast explicit coordination with two
messages where the requesting vehicle does not need
to know the adapted trajectories of the other vehicles.
However, this might introduce ambiguity and some
overhead in the movement of the other participants,
especially in a more complex traffic situation with
many vehicles included because it does not include a
final confirm message such as in ETB. A CONFIRM
message ensures that the selected trajectories of all
participating vehicles will not conflict.
Additional analysis is required to show the impact
of the presented approaches on the traffic efficiency.
The ETB approach used the vehicular networking
simulation framework Artery
2
and evaluated the loss
of time caused by driving below the ideal speed in a
simple highway lane merging scenario. The results
have shown that the total time loss for the communi-
cating vehicles can be reduced up to 50% compared
2
https://github.com/riebl/artery
A Survey on Decentralized Cooperative Maneuver Coordination for Connected and Automated Vehicles
107

to non-communicating vehicles. The presented ap-
proaches also need to prove that they can prevent any
additional safety risks introduced by the maneuver co-
ordination process and validate the safety of the proto-
col using different metrics. (Correa et al., 2019) per-
formed a simulation in the microscopic traffic simu-
lator SUMO
3
, which showed that this approach could
significantly increase the safety by reducing the time-
to-collision (TTC) events with less than 3 s. In addi-
tion to the TTC, other safety metrics can be used such
as the Post Encroachment Time (PET) metric that de-
scribes how dangerous a certain situation can be.
All of the presented decentralized approaches in-
clude only a single requesting vehicle to initiate the
coordination process and the other vehicles need to
adapt based on their needs. The infrastructure sup-
port could help to provide more neutral coordination
in certain situations; a joint maneuver negotiation pro-
cess with more initiating vehicles can be considered
too. The more complex cascading process, where ve-
hicles need to send another maneuver request in order
to accept an incoming request, is avoided too.
5 OPEN TOPICS FOR
DECENTRALIZED MANEUVER
COORDINATION
The review and discussion in the previous sections
have shown that several approaches with different
characteristics exist. This section presents further re-
search gaps related to the detection and decision logic,
to the protocol and to V2X communications.
5.1 Detection and Decision Logic
How to Detect a Maneuver Coordination Need?
The reviewed approaches discuss only what happens
after the need for cooperation has been recognized
and the detection process is not described. An al-
gorithm is required that perceives the surrounding
CAVs hindering the desired maneuver and decides
when an alternative, more suitable and feasible ma-
neuver should be requested. Different metrics could
be used to take a decision such as improving the
time efficiency and avoiding safety-critical situation
in a worst-case scenario. Mixed traffic scenarios
with communicating and non-communicating vehi-
cles should also be investigated, since the presented
approaches consider only situations involving CAVs.
How to Decide whether to Accept or Reject a Ma-
neuver Coordination Request? The best and easiest
3
https://www.eclipse.org/sumo
situation for a maneuver coordination is the one that
is beneficial for all of the included vehicles. Since
in most of the situations one vehicle will be disad-
vantaged, the evaluation of the situation and request
is very important for the accepting vehicle and an
appropriate assessment is required. In (D
¨
uring and
Pascheka, 2014), different types of cooperative and
uncooperative behavior are defined based on a total
utility function. Metrics or cost functions consider-
ing loss of time, required deceleration and velocity or
potential safety critical consequences can be used to
decide whether to accept or reject a request in certain
traffic situations.
5.2 Maneuver Coordination Protocol
Is an Application-independent, Robust
Representation of Trajectories Possible? Commu-
nicated trajectories need to be correctly interpreted
at both, the requesting and accepting vehicles. It
needs to be independent from specific applications
and a situation analysis system is needed to cor-
rectly represent the trajectories in the environmental
model of a CAV. Falsely interpreted or inaccurate
trajectory-related data can lead to conflicted negotia-
tion outcome for the involved vehicles and introduce
safety critical situations.
Can the Number of Involved Vehicles Be
Increased? A coordination between two vehi-
cles appears as a promising approach. Considering
the probability of successful cooperation and com-
munication failures, a coordination involving three
or more vehicles leads to a considerably higher
complexity and the protocols need to specify the
number of vehicles that could potentially cooperate
in more difficult traffic scenarios. The current
approaches have no upper bound on the potential
number of included vehicles and the scalability of
the coordination in different traffic scenarios requires
further analysis.
What Kind of Message Type and Format has to
be Used? Most of the existing approaches propose
a new, dedicated message type (MCM) for the ex-
change of trajectory-related information among the
vehicles. RSU maneuver container in the MCM for-
mat is also discussed to incorporate the infrastruc-
ture support in specific situations, in this way utilizing
vehicle-to-infrastructure communications to enhance
the coordination process. The required standardized
format of trajectory representation will very much de-
pend on the data carried by the MCMs.
How Many Coordination Messages are Required?
Fast, safe, unambiguous and efficient coordination re-
quires a certain fixed number of negotiation messages
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
108

for each situation. Each coordination requires at least
a request and an acceptance or rejection message.
Final decision message such as the presented CON-
FIRM message (Xu et al., 2019) also ensures that the
coordination will be executed as planned. Additional
messages in specific situations might also be consid-
ered such as cancel message, if the requesting vehi-
cle decides to cancel the request, or abort message in
a situation when the requesting or accepting vehicle,
due to specific reasons, aborts an already agreed ma-
neuver in the execution phase.
Can Use Case-specific Application Messages Be In-
cluded? The proposed generic approaches cover sev-
eral cooperative maneuver coordination use cases but
some might need additional use case-specific infor-
mation. For this purpose, a generic protocol should
be able to incorporate application-specific messages.
Such type of messages could be required for the man-
agement of vehicles driving in a platoon or convoy,
or to request additional information required for the
completion of a specific maneuver such as the right
timing to perform a cooperative overtaking maneuver
on a rural road.
Which Message Generation Rules Can Be Iden-
tified? These rules define when and which vehicle
should send a message. They can have a huge im-
pact on the effectiveness of the coordination process
and data traffic in general. Some of the reviewed ap-
proaches propose periodic broadcast, but the exact
interval is not defined. Similar to CAM and CPM,
dynamic generation rules for maneuver coordination
messages could be considered where the message in-
terval depends on the vehicle dynamics, i.e., speed,
heading and acceleration.
How Can Cascading Be Enabled? Maneuver cas-
cading has so far been avoided by the presented de-
centralized approaches. It can help in many traffic
situations to realize a requested maneuver. The ac-
cepting vehicle needs to request a maneuver itself to
another adjacent vehicle. If this additional maneuver
is successful, assuming that the current driving situ-
ation did not change significantly, it will enable the
initial requesting vehicle to execute its desired maneu-
ver. It can also be seen as an explicit maneuver coor-
dination between more than two vehicles, which will
include additional negotiation messages. Such a cas-
cading maneuver will prolong the negotiation process
and will bring additional complexity, but it can even-
tually increase the probability of a successful coordi-
nation. A further analysis is needed to show whether
such a maneuver can be safe and efficient enough to
be considered as an addition to the coordination pro-
tocol in specific situations.
Can the Data Security and Privacy Be Guaran-
teed? It can be presumed that maneuver coordina-
tion will apply digital signatures and certificates of the
V2X communication system that provides integrity,
authentication and non-repudiation of the exchanged
messages. Still, open challenges exist, e.g. for mis-
behavior detection and mitigation as an application-
specific security mechanism. Similarly, privacy will
be expected to rely on short-living and changing
pseudonyms. However, pseudonyms must not be
changed during a maneuver since it is a safety-critical
situation. Also, the small number of vehicles involved
in a maneuver may undermine the anonymity since
the requesting or accepting vehicle may be identifi-
able.
5.3 V2X Communications
What are the Communication Requirements for
Maneuver Coordination? So far, the V2X com-
munication system has been primarily designed for
driver information and warnings with relaxed com-
munication requirements. It is commonly accepted
that safety-critical communications such as maneuver
coordination require very low latency (∼ 10 ms) and
very high communication reliability (> 99%) (Boban
et al., 2018). The specific requirements for the ex-
change of multiple subsequent messages are not yet
well understood since most of the existing work refers
to individually broadcast messages.
Can Advanced Features of the Underlying Ac-
cess Technology Be Exploited? WLAN-V2X and
Cellular-V2X have been widely studied and their po-
tential benefit for safety applications is well investi-
gated. It is still to be seen whether the specific ad-
vanced features in Cellular V2X translate it into im-
proved performance for maneuver coordination. One
example of these features is the bounded latency of
Sensing-based Semi-Persistent Scheduling (SB-SPS)
in Cellular-C2X in scenarios with a high network
load. Also, it is to be investigated whether the evolu-
tion of the access technologies, incl. IEEE 802.11bd
and 5G NR V2X bring advantages, e.g. for the relia-
bility or the latency of the message exchange.
Will Broadcast Communication Prevail? V2X
communication is primarily based on broadcast com-
munication, more specifically single-hop broadcast
or (in the European V2X system) multi-hop broad-
cast within a defined geographical area. By de-
sign, broadcast does not provide reliable message
exchange since the feedback implosion prevents ap-
plying acknowledgements and re-transmissions. The
message exchange for cooperative maneuver coordi-
nation typically involves only few vehicles and may
A Survey on Decentralized Cooperative Maneuver Coordination for Connected and Automated Vehicles
109

facilitate other approaches than broadcast, e.g., small-
group multicast with explicit acknowledgment that in-
creases the reliability.
Should Multi-channel Operation Be Applied? A
higher number of messages increases the channel
load, which results in a lower reliability and longer
latency. In order to reduce the risk of channel con-
gestion, an analysis is required whether the MCMs
should be integrated on the same channel with other
messages with a prioritization among the messages,
or a multi-channel option should be considered.
6 CONCLUSION
Maneuver coordination using V2X communications
targets at safer, more comfortable and efficient driv-
ing for CAVs. Generic approaches for maneuver
coordination can be identified as a research trend.
These approaches solve different traffic situations by
a scenario-independent solution. In the present paper,
existing proposals were reviewed and analyzed. Also,
seven use cases, for which maneuver coordination is
expected to bring benefits, were presented, ranging
from C-ACC to infrastructure-controlled cooperative
driving. In order to explain the differences and novel-
ties, the existing generic approaches for decentralized
coordination were described in detail for a lane merg-
ing scenario as an example use case. The approaches
were classified into four categories: Implicit Trajec-
tory Broadcast (ITB), Explicit Trajectory Broadcast
(ETB), ITB with Cost Values (ITB-CV) and Space-
Time Reservation (STR).
The analysis and discussion of the proposed pro-
tocols in the paper has shown that explicit maneuver
negotiation and broadcast of future maneuver inten-
tions can enable safe and efficient maneuver coordi-
nation. Further analysis is needed to evaluate the im-
pact of the proposed approaches on traffic safety and
efficiency. The introduction of additional safety risks
needs to be eliminated. Well-defined metrics for traf-
fic safety and efficiency should be considered to as-
sess the performance. In the paper, challenges were
highlighted and future research directions identified.
These include the detection and decision logic of ma-
neuvers, syntax and semantic of the maneuver pro-
tocol as well as reliability mechanisms of the V2X
protocol. The key research question is: How can a
use case-independent, reliable and low-latency proto-
col for safe, comfortable and efficient maneuver coor-
dination be designed?
ACKNOWLEDGEMENTS
This work was gratefully supported by the German
Science Foundation (DFG) by project KOALA 2
under number 273374642 within the priority pro-
gram Cooperatively Interacting Automobiles (CoIn-
Car, SPP 1835). The authors thank Daniel Heß (DLR)
and Alexey Vinel (Halmstad University) for valuable
discussions. The scenario figures in the paper were
created with the illustration toolkit from the C2C-
CC.
4
REFERENCES
Bevly, D. et al. (2016). Lane change and merge maneu-
vers for connected and automated vehicles: A survey.
IEEE Transactions on Intelligent Vehicles, 1(1):105–
120.
Boban, M., Kousaridas, A., Manolakis, K., Eichinger, J.,
and Xu, W. (2018). Connected roads of the future:
Use cases, requirements, and design considerations
for vehicle-to-everything communications. IEEE Ve-
hicular Technology Magazine, 13(3):110–123.
Chen, L. and Englund, C. (2016). Cooperative intersection
management: A survey. IEEE Transactions on Intel-
ligent Transportation Systems, 17(2):570–586.
Correa, A. et al. (2019). Infrastructure support for cooper-
ative maneuvers in connected and automated driving.
In 2019 IEEE IV Symposium, pages 20–25.
Dey, K. C. et al. (2016). A review of communication, driver
characteristics, and controls aspects of Cooperative
Adaptive Cruise Control (CACC). IEEE Transactions
on Intelligent Transportation Systems, 17(2):491–509.
D
¨
uring, M. and Pascheka, P. (2014). Cooperative decen-
tralized decision making for conflict resolution among
autonomous agents. In 2014 IEEE INISTA, pages
154–161.
Heß, D., Lattarulo, R., P
´
erez, J., Hesse, T., and K
¨
oster, F.
(2019). Negotiation of cooperative maneuvers for au-
tomated vehicles: Experimental results. In 2019 IEEE
ITSC, pages 1545–1551.
Heß, D., Lattarulo, R., P
´
erez, J., Schindler, J., Hesse, T.,
and K
¨
oster, F. (2018). Fast maneuver planning for
cooperative automated vehicles. In 2018 ITSC, pages
1625–1632.
Hobert, L. et al. (2015). Enhancements of V2X communi-
cation in support of cooperative autonomous driving.
IEEE Communications Magazine, 53(12):64–70.
Lehmann, B., G
¨
unther, H., and Wolf, L. (2018). A generic
approach towards maneuver coordination for auto-
mated vehicles. In 2018 ITSC, pages 3333–3339.
Llatser, I., Michalke, T., Dolgov, M., Wildsch
¨
utte, F., and
Fuchs, H. (2019). Cooperative automated driving use
cases for 5G V2X communication. In 2019 IEEE 2nd
5G World Forum, pages 120–125.
4
URL: http://https://www.car-2-car.org
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
110

Marjovi, A., Vasic, M., Lemaitre, J., and Martinoli, A.
(2015). Distributed graph-based convoy control for
networked intelligent vehicles. In 2015 IEEE IV Sym-
posium, pages 138–143.
Molina-Masegosa, R. and Gozalvez, J. (2017). LTE-V for
sidelink 5G V2X vehicular communications: A new
5G technology for short-range vehicle-to-everything
communications. IEEE Vehicular Technology Maga-
zine, 12(4):30–39.
Nichting, M., Heß, D., Schindler, J., Hesse, T., and K
¨
oster,
F. (2019). Explicit negotiation method for cooperative
automated vehicles. In 2019 ICVES, pages 1–7.
Sj
¨
oberg, K., Andres, P., Buburuzan, T., and Brakemeier, A.
(2017). Cooperative Intelligent Transport Systems in
Europe: Current deployment status and outlook. IEEE
Vehicular Technology Magazine, 12(2):89–97.
Vukadinovic, V. et al. (2018). 3GPP C-V2X and
IEEE 802.11p for vehicle-to-vehicle communications
in highway platooning scenarios. Elsevir Ad Hoc Net-
works, 74:17 – 29.
Xu, W., Willecke, A., Wegner, M., Wolf, L., and Kapitza,
R. (2019). Autonomous maneuver coordination via
vehicular communication. In 2019 IEEE/IFIP DSN-
W, pages 70–77.
A Survey on Decentralized Cooperative Maneuver Coordination for Connected and Automated Vehicles
111
