
A Survey of UAS Technologies to Enable Beyond Visual Line Of Sight
(BVLOS) Operations
Elena Politi
a
, Ilias Panagiotopoulos
b
, Iraklis Varlamis
c
and George Dimitrakopoulos
d
Department of Informatics and Telematics, Harokopio University of Athens, Greece
Keywords:
Beyond Visual Line Of Sight (BVLOS) Operations, UAV, UAS, Drone Technologies, Requirements.
Abstract:
Latest trends, societal needs and technological advances have led to an unparalleled expansion in the use
of Unmanned Aerial Systems (UAS) for versatile civilian and military applications, ranging from simple
everyday operations, to the supervision in construction sites, even logistics, among others. Unmanned Aerial
Vehicles (UAVs), widely known as drones, are the main components of UAS, and are becoming increasingly
popular in such operations, since they reduce costs, they facilitate activities and can increase the granularity of
surveillance or delivery. Furthermore, they can pave new ways for the implementation of smart-sensing and
navigation functionalities, support automation, safety of operations, prognostics and even forensic analyses.
Being an emerging technology, several challenges still need to be tackled in order to make UAS suitable for
real-world applications, which impose strict performance, dependability and privacy requirements. In the light
of the above, this paper provides an in depth survey of current UAS technologies for Beyond the Visual Line of
Sight (BVLOS) UAS operations and highlight the main technological challenges and requirements that arise.
We also focus on the emerging and future BVLOS UAS features and the technological advances that render
their expansion in various industrial sectors promising.
1 INTRODUCTION
Unmanned Aerial Vehicles (UAVs), commonly re-
ferred to as drones, are the main component of Un-
manned Aerial Systems (UAS), which also comprise
a ground-based controller, and communication sys-
tem. UAVs were first introduced as military devices,
but soon managed to take a leap in the commercial
and civil sector. In the last few years, UAVs are in-
creasingly considered in a wide range of applications
for surveillance and safety checks in domains such as
construction, mining, agriculture, logistics and prod-
uct delivery, insurance, and many more (Nouacer
et al., 2020). As their popularity is increasing, it is
predicted that the global commercial drone’s market
will grow to 7.13 billion at a CAGR of 19.9 through
2022 (Kovalev et al., 2019). To this end, UAS use
is expected to have a significant impact on the qual-
ity of life, health, social and economic well-being
(Kyrkou et al., 2019). In this direction, Beyond Vi-
sual Line of Sight (BVLOS) capabilities are becom-
a
https://orcid.org/0000-0001-8795-5560
b
https://orcid.org/0000-0003-4366-6470
c
https://orcid.org/0000-0002-0876-8167
d
https://orcid.org/0000-0002-7424-8557
ing recently a pivotal aspect for the drone industry.
The extended levels of autonomy in addition to the
increased efficiency of such operations has given po-
tential to even more applications in the field. In the
rest of the manuscript, the terms Unmanned Aerial
Vehicle (UAV) and drone are used interchangeably to
refer to an unmanned vehicle that is remotely oper-
ated by a human or software.
The related literature so far provides useful in-
formation for the technological aspects of UAS, the
societal and regulatory barriers for their acceptance
and forms a useful basis for a similar analysis for
BVLOS drone operations. Authors in (Hassanalian
and Abdelkefi, 2017) provide a detailed analysis of
the various drone types, with emphasis on their ca-
pabilities and restrictions. The main types of UAS
applications are surveyed in (Rakha and Gorodetsky,
2018) and in (Otto et al., 2018), authors provide an
overview of current optimization approaches for civil-
drone applications. The recent research efforts on
the use of UAVs in transportation, and specifically
in road safety, traffic monitoring and highway infras-
tructure management tasks are surveyed in (Outay
et al., 2020). Finally, more interesting applications
of UAS integration in smart cities, as well as the en-
Politi, E., Panagiotopoulos, I., Varlamis, I. and Dimitrakopoulos, G.
A Survey of UAS Technologies to Enable Beyond Visual Line Of Sight (BVLOS) Operations.
DOI: 10.5220/0010446905050512
In Proceedings of the 7th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2021), pages 505-512
ISBN: 978-989-758-513-5
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
505
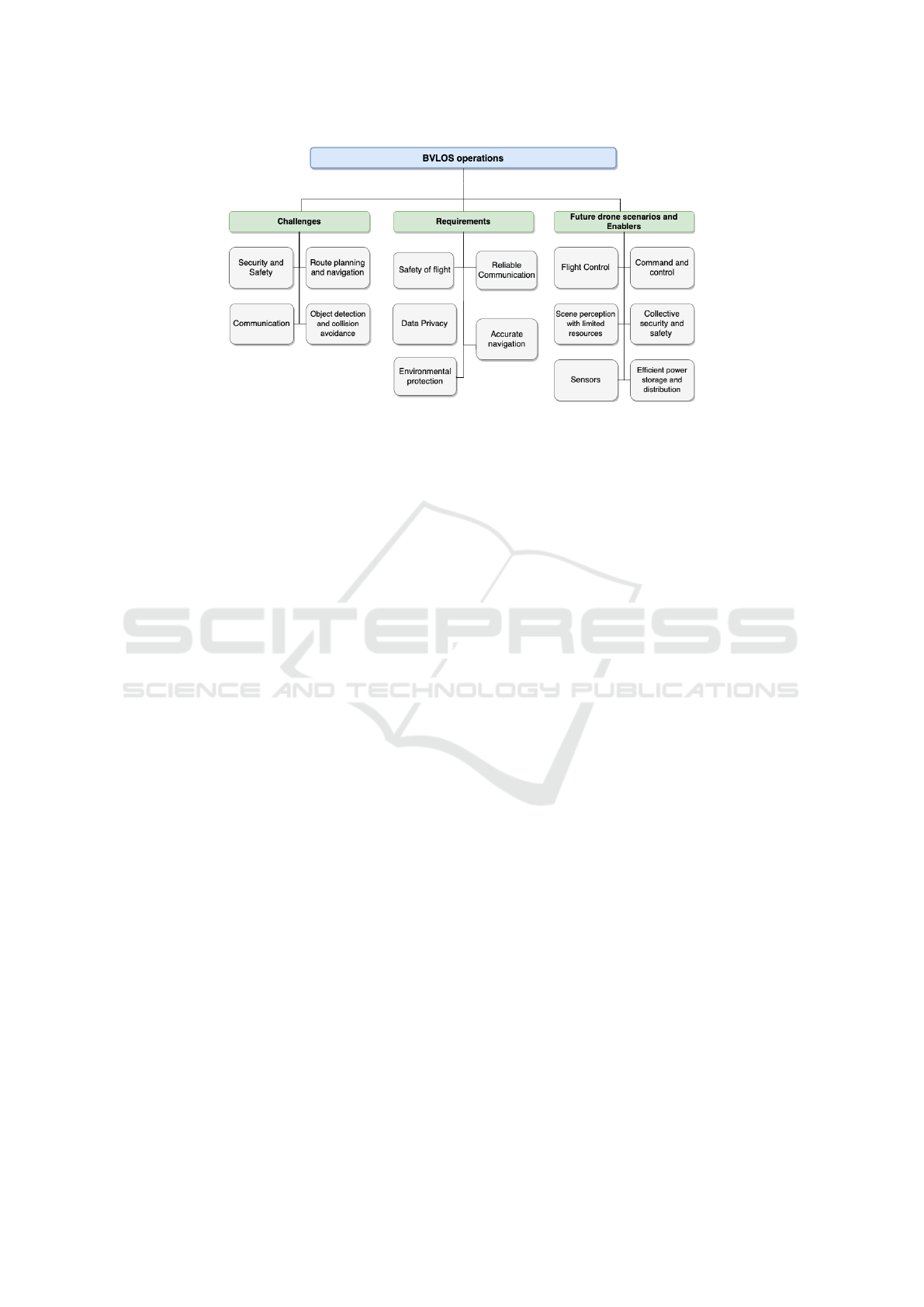
Figure 1: An overview of the challenges, requirements and enablers, for BVLOS drone operations.
abling technologies and issues are explored in (Mo-
hamed et al., 2020).
Existing surveys emphasize on remote controlled
UAVs, in which the operator has a visual line of
sight to the vehicle and navigates the drone from a
ground based controlled, using the communication
system. The technological advances and the increased
demand for drone operations, give rise to the need
for UAS that can successfully perform BVLOS op-
erations, with wider autonomy and minimised inter-
action with the ground control. This work surveys the
current state of the art on BVLOS drone operations,
and emphasizes on technologies that can support the
related projects. It analyses each technology and lists
the high and low level requirements that unmanned
operation of UAS BVLOS dictates.
The main contributions of this work can be sum-
marized in the following and Figure 1 depicts the
main points of this analysis:
• A presentation of the main BVLOS operation
challenges and the requirements they raise, with
emphasis on the technological requirements.
• A survey of the main BVLOS advances and future
scenarios and the main technology enablers that
can support them.
To this end, Section 2 summarizes the main survey
works in BVLOS drone operations. Section 3 refers
to the main tasks and challenges for BVLOS opera-
tions and summarizes the high and low-level require-
ments that are accomodated. Section 4 presents the
main technologies needed for the successful delivery
of BVLOS operations and presents the key enablers
for future BVLOS drone operation scenarios. Finally,
in Section 5 we discuss the main findings of this study
and the conclusion of this work.
2 RELATED WORK
The integration of BVLOS capabilities in various
drone operations is lately attracting more research in-
terest. Although there is a wide range of applica-
tions traditionally supported by Visual Line of Sight
(VLOS) and Extended Visible Line of Sight (EVLOS)
operating modes, BVLOS operations are expected to
dominate our skies within the next years, offering a
large variety of services, such as inspection of infras-
tructure, deliveries, human transportation or precision
agriculture (Undertaking, 2018).
The three modes depend on the interaction be-
tween the UAV and its operator (Sebbane, 2018):
• In VLOS the UAV should always be within the in-
obstructed view of the pilot (Macias et al., 2019).
• In EVLOS the operator may partly rely on critical
flight information from remote observers that are
in visual line with the UAV (Bloise et al., 2019).
• In BVLOS the UAV is allowed to operate away
from the visual range, based on instrumentation
such as on-board cameras and detect-and-avoid
technologies.
The choice of the appropriate operation mode de-
pends on the type of application, the distance that can
or must be covered, the conditions in the operation
spot and in some cases on the criticality of the task.
This makes VLOS mostly preferable by hobbyists,
real estate agents, cinematographers and TV produc-
ers for scene coverage, EVLOS and BVLOS a better
choice for inspections and surveying (structural, mil-
itary, environmental or agricultural), mapping as well
as for package delivery and search and rescue mis-
sions (Davies et al., 2018).
In the absence of human control for short or longer
periods, recent works aim to explore BVLOS modes
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
506

that endow UAV flights with higher levels of intel-
ligence and greater efficiency. Compared to VLOS
or EVLOS operation modes, which require a certain
level of human interaction, BVLOS UAVs can dy-
namically change their flight plan and mission accord-
ing to prevailing conditions without a human operator.
Extended autonomy in BVLOS capabilities enables a
drone to cover far greater distances, with a lower cost
and a reduced risk to human life. On the other side,
BVLOS operations create a new landscape for com-
munication, navigation, and flight under varying con-
ditions. Various BVLOS scenarios for efficient capa-
bilities are explored in (Fang et al., 2018).
During the last few years, a number of inter-
esting studies propose novel methodologies for BV-
LOS missions and operations in numerous applica-
tions (Kato et al., 2019). In this basis, BVLOS mis-
sions enable service providers to perform complex
operations by data provided from on-board and exter-
nal instruments. The operator is informed about the
position, altitude, speed and direction of flight as well
as about all the relevant parameters of the flight body.
In addition, UAS flying in BVLOS operation mode
can also change control sensors and flight parameters
to collect data (Davies et al., 2018).
This work presents the main challenges for BV-
LOS operations and the requirements that emanate
from them. Next, we identify the technological ad-
vances that may play a key role as enablers for the
deployment of successful BVLOS drone scenarios.
3 BVLOS MAIN CHALLENGES
Security and Safety: Security and safety of flight re-
main critical issues in unmanned aircraft missions. It
is clear that the absence of a clear regulatory frame-
work at national or international level (e.g. for China,
the US or EU countries) inhibits the growth of the
drone services and aircrafts market, and limits the po-
tential for employment creation in this sector of the
economy (Nouacer et al., 2020). Therefore, across
the globe, laws and regulations are needed in order to
manage drone impacts, particularly in lower airspace
(Merkert and Bushell, 2020). Regulatory measures
can significantly increase the requirements of oper-
ators to build a safety culture into their operations.
To this end, the European Aviation Safety Agency
(EASA) has developed a regulatory framework that
defines the technical and operational requirements for
UAS, provides guidelines for safe operation, and ad-
dresses privacy, security and data protection issues
(Bassi, 2019). Standards and Recommended Prac-
tices (SARPs) for BVLOS operations are under de-
velopment by the International Civil Aviation Organi-
zation (ICAO) with adoption foreseen in 2020 leading
to operations as from 2023 (Undertaking, 2018).
Route Planning and Navigation: Efficient navi-
gation and perception of the UAV surroundings is
critical in BVLOS operations. Amongst other au-
tonomous features, a UAV operating BVLOS should
be able to dynamically revise its path planning strat-
egy according to the environment and through a "De-
tect Sense and Avoid" (DAA) system, that guaran-
tees collision avoidance and situational awareness
(González-Sieira et al., 2020).
To improve the planning efficiency of UAS, many
innovative methods have been explored, such as
multi-resolution maps (González-Sieira et al., 2020),
game theory, and bio-inspired methods, such as
swarm optimization algorithms and Potential Fields
(Iacono and Sgorbissa, 2018). In latest years, the in-
tegration of Artificial intelligence technologies (i.e.
Deep Learning/Machine Learning) has thrown spot-
light on drone intelligence and automation, endow-
ing UAV applications with a higher degree of robust-
ness and accessibility (Nouacer et al., 2020). Sev-
eral very interesting studies have explored various AI
methods, such as Reinforcement Learning (RL) algo-
rithms in combination with deep learning techniques
to efficiently execute navigation tasks in large-scale
complex environments (Wang et al., 2019)
Communication: During a mission, it is essential
for an UAV to interact with other entities, such as air
traffic management systems, ground stations or even
other UAVs. In BVLOS operations, there exists a
greater need for a UAV to be aware of its surround-
ings with the use of DAA technology (Davies et al.,
2018). In such terms, robust and reliable communi-
cation channels as well as efficient data exchange are
essential for safe and efficient operations.
Existing cellular networks (including the 5G) or
even satellite links may support data exchange in BV-
LOS applications (Hosseini et al., 2019). However
several issues may compromise the reliability of com-
munication between operator and UAV. For instance,
long-distance radio communication may impose large
propagation delay, high packet-loss ratio, and high
power consumption. Moreover, the kinematics of the
UAV leads to time-variant network topologies and fre-
quent link outages, that often lead to communication
failure(Wang et al., 2017). It is thus important to de-
velop communication protocols and communication
loss handling techniques that will guarantee the unin-
terrupted UAV operation.
Object Detection and Collision Avoidance: As avi-
ation technology is progressing, the unique character-
istics of UAS, as flying instruments with high mobil-
A Survey of UAS Technologies to Enable Beyond Visual Line Of Sight (BVLOS) Operations
507

ity in three-dimensional space and the need for au-
tonomous operation, raise new requirements of vigi-
lant path planning strategies, that can safely navigate
drones from origin to destination. One of the most
challenging aspects of a UAV mission is to combine
autonomous features with an optimal motion planning
approach, that guarantees a safe navigation through
unknown spaces and obstacles, that may appear dy-
namically as the route evolves. The main challenge
for current collision avoidance systems for drones is
the effective and efficient detection of static or mov-
ing objects, the identification of their type and the
prediction of their trajectory. With this information,
collision avoidance systems are able to predict trajec-
tories that will meet in space and time, and conse-
quently change the drone speed and direction in order
to avoid it.
In such terms, UAVs operating BVLOS must have
the ability to dynamically revise their course and
safely change paths, in order to provide conflict-free
trajectories through a DAA capability (Krishnan and
Manimala, 2020).
Requirements for BVLOS Operations: Recent de-
velopments in aviation technology are driving new
business opportunities for UAS, particularly in BV-
LOS operations. As the future integration of drones is
expected to rely on high levels of automation and con-
nectivity, the establishment of specific requirements
and procedures to ensure safety in the air, as well as
on the ground, is critical. In order to offer safe and
efficient BVLOS missions, several requirements need
to be addressed to ensure the maximum safety for BV-
LOS operations. It is important to improve the UAS
communications technology, in order to support re-
mote command and control, navigation, surveillance,
and situation awareness. This will also allow the in-
tegration with Air Traffic Management (ATM) sys-
tems that will remotely pilot UAVs, and will open
the road for autonomous or semi-autonomous flights
(Balachandran et al., 2017).
Aviation safety and privacy requirements should
also be considered. UAVs should operate with mini-
mum risk to other airspace users, and people on the
ground, especially in the highly cluttered airspace
of urban areas. Moreover, privacy in terms of data
protection of both the operators and their customers
should be sustained. Environmental protection is an-
other critical issue in UAS operations (Undertaking,
2018). The impact of drone traffic on the environ-
ment, such as emissions, noise, visual pollution and
air quality can affect the health and quality of life of
citizens and therefore the aviation sector should re-
spond to the major environmental challenges ahead
with innovative, smart and environmentally sustain-
able solutions and technologies.
4 BVLOS TECHNOLOGY
ADVANCES AND ENABLERS
As drones are increasingly considered for a number of
applications in diverse areas, it is generally expected
that their ubiquity will significantly expand within the
next few years. The use of UAVs can bring significant
economic savings and environmental benefits, while it
can reduce the risk to human life. Recent advances in
drone technologies, as well as the existence of a clear
regulatory framework can set the ground for a greater
adoption of unmanned technology in a wide range of
applications. Several key areas have been identified
as facilitators of future growth and development for
drones(Nouacer et al., 2020), and are analyzed in the
following.
Flight Control: The design of reliable and high-
performance flight control systems can be a difficult
challenge for many reasons, such as unpredictable dy-
namics (e.g. air flows or rain) that may affect the
flight of small UAVs, or the presence of static and
moving obstacles in cluttered urban environments that
can pose severe limitations to aircraft navigation, etc.
(Santoso et al., 2017).
An aircraft autopilot system allows the aircraft
control without direct human interaction, reducing
operation errors and the work load of human pi-
lots. Such systems handle most of the time-intensive
non–decision-making tasks, helping the human pilots
to focus on the overall status of the aircraft and flight
(Jia et al., 2018). There exist two levels of autonomy
for flight-control systems (Aber et al., 2019):
• Autonomous or fully automated mode: In this
mode, the aircraft follows a flight-line that has
been predefined by the user with flight-planning
software. It makes its own decisions during the
mission and reacts to unforeseen events without
the pilot’s intervention.
• Assisted or semi-automated mode: In this case,
human intervention is reduced to a minimum
(speed and direction control) allowing the pilot
to perform complex decision processes and bet-
ter concentrate on high added-value tasks, such as
safety of the flight.
Recent advances in autopilot systems focus on
more intelligent approaches of adaptive control tech-
nologies that can sustain a higher degree of autonomy
during flight and therefore deal with various environ-
mental uncertainties as well as on-board limitations
(Santoso et al., 2017). Moreover, demands for so-
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
508

phisticated decision making and cognitive capabilities
in current aviation require computationally efficient
and robust approaches. To this end current research
trends have explored the implementation of fuzzy
logic based control techniques (Xie et al., 2019), arti-
ficial neural networks (Boutemedjet et al., 2019), ge-
netic algorithms (Mousavi et al., 2019) or swarm in-
telligence (Dasdemir et al., 2020).
Command and Control: Ensuring a reliable Com-
mand and Control (C2) link is essential for safe BV-
LOS drone operations. The purpose of this two-way
link is to provide a secure and reliable communi-
cation between the remote pilot ground station and
the aircraft, which will allow to manage a secure
and effective flight. On one hand, in the uplink, i.e.
from a drone to base station (BS), the control link is
used to update the Unmanned Aircraft System Traf-
fic Management (UTM) or flight control unit with the
drone location, and provide information necessary for
the control function decision making. On the other
hand, the downlink (i.e. communications towards the
drone) allows the control function to change the drone
direction and speed accordingly, in order to avoid ob-
stacles or send commands to various on-board sen-
sors(Nguyen et al., 2017). Existing cellular networks
(e.g. LTE systems) are a natural candidate to provide
C2 link for drone operations. However, several lim-
itations may occur due to the growing bandwidth re-
quirements or interference at high altitude (Nguyen
et al., 2017). Moreover, different channel conditions
and frequencies of BVLOS operations, with different
latency and range, increase the challenges for a reli-
able communication(Hosseini et al., 2019).
To meet these challenges, other technologies that
offer new capabilities are explored. For example, the
millimeter wave bands that are deployed in 5G cellu-
lar networks offer larger bandwidths that allow faster
payload communications. The use of satellite con-
nections may also efficiently complement and extend
the coverage and reliability for BVLOS links. How-
ever, the choice of satellite orbit, i.e., low-earth orbit-
ing (LEO) or geosynchronous earth orbiting (GEO)
may be critical (Kodheli et al., 2017) in this task.
Scene Perception with Limited Resources: Future
drone technology is currently undergoing ground-
breaking progressive improvement. Scene perception
is becoming one of the most critical tasks for safe and
accurate drone navigation operations. Apart from the
detection of individual objects that may interfere as
obstacles to the vehicle root, perception also refers
to the understanding of their relative locations, and
their tracking in order to predict their future behavior.
It also includes the detection of environmental con-
ditions (e.g. wind) that may affect the route of any
moving object, including the drone itself.
Since UAS missions employ multiple image sen-
sors in the visible or infrared (for nightly operations)
spectrum, the main requirement is the smart fusion
of multiple sensors (Carrio et al., 2020) in an re-
source efficient manner that allows very fast detection
of moving objects and their distance from the moving
drone as well as the separation from the background.
The fusion of multiple sensors and the process-
ing of RGB and stereoscopic images with deep neural
network (NN) architectures has been proven benefi-
cial for scene perception tasks with several applica-
tions. For this reason, deep NNs are becoming the
main solutions for such tasks and field-programmable
gate array (FPGA) implementations are used to facili-
tate real-time object detection tasks on mobile devices
(Xu et al., 2018). The increased processing capabili-
ties of such edge devices allow to design and imple-
ment distributed processing scenarios, that combine
heavy centralised trained deep learning models with
lighter or compressed versions on the edge for infer-
ence (Chmaj and Selvaraj, 2015). Transfer learning
techniques are recently employed to leverage training
on the edge (Anwar and Raychowdhury, 2020).
Collective Security and Safety of Drone
Operations: Guaranteeing the safe and secure
navigation of individual drones, under the current
constraints of computational power and storage,
may become a really hard task. A solution to the
increased processing requirements that real-time
scene and environment perception sets for individual
drones, can be the collective intelligence of drone
fleets (Akram et al., 2017). Drones that exchange
information about the scene on air can significantly
reduce the overall processing load and lead to safer
navigation plans.
In addition to the above, lightweight (cryp-
tographic) protocol designs will provide security
solutions for resource and energy-constrained drones.
Future scenarios build on the Internet of Drones
(IoD), but still lack of efficient data encryption tech-
niques that can scale to the computational capability
of drones (Lin et al., 2018). Under the new condi-
tions, access controls and precise navigation plans of
drones are replaced with plans comprising smaller
hops towards the destination and real-time navigation
adjustments to avoid congestion and collisions.
Sensors: There is an obvious need for a UAV to be
aware of its surroundings and aware of other air traf-
fic. The rapid development of sensor technologies
combined with advances in the miniaturization of in-
struments and data systems have opened up new po-
tential in UAVs’ sensing capabilities. For instance,
the integration of GPS and detection sensors can al-
A Survey of UAS Technologies to Enable Beyond Visual Line Of Sight (BVLOS) Operations
509

low compact and robust navigation solutions to deter-
mine attitude and location of vehicle, so it can de-
termine its state in a robust way and use appropri-
ate control techniques for autonomy (García et al.,
2020). Apart from navigation, UAVs can perform
sophisticated data gathering due to various on-board
sensors, such as capturing atmospheric or agricultural
data (van der Merwe et al., 2020). One major tech-
nological breakthrough over the past years is the field
of Artificial Intelligence (AI)-based methods, which
leverage adaptive capabilities and enhance percep-
tion tasks, such as object detection, classification, and
scene segmentation (Bijjahalli et al., 2020).
Efficient Power Storage and Distribution: As UAV
operations are characterized by limited on-board re-
sources, energy optimization is important. Several
factors can be energy consuming during a flight, for
instance transmission and reception of data, execu-
tion of software functions resource management or
flight time optimization(Wang et al., 2020). More-
over UAVs may consume large amounts of propul-
sion power in order to accelerate, maintain airborne
or perform hovering tasks. Recent developments in
rechargeable battery cells, super-capacitors and solar
cells aim to offer an extension to the flying time of
UAVs by increasing the life cycle of battery. More-
over a lot of effort has been put in order to improve
the throughput and energy consumption, by optimiz-
ing the trajectory and power allocation of UAV. Re-
cent works have also explored UAVs energy opti-
mization by considering both propulsion energy and
wireless communication energy, while ensuring satis-
factory communication requirements with the ground
stations (Amorosi et al., 2018).
5 DISCUSSION AND
CONCLUSIONS
The survey of current technology advances and fu-
ture enablers for UAS operations reveals that there are
many promising research results, which can support
BVLOS missions and help to align with the regula-
tory frameworks for flight and operational safety.
Modern UAS autopilot systems use intelligent ap-
proaches that adapt to the environmental conditions
and to the fused input of sensors, thus adding to
their autonomy during the flight and allowing them
to cover longer distances without the need of ground
control or VLOS supervision. Similar to autonomous
vehicles, which ask for human intervention only when
the conditions do not allow for a clear decision, au-
tonomous UAS are developed to operate without or
with limited human intervention. This limits the need
for air-to-ground communication and consequently
minimizes the power and the bandwidth consumed
for communication and remote control. Even when a
connection with a ground station is required, the new
5G cellular networks promise speed improvement and
right trade-offs between speed, latency, and cost.
Furthermore, as UAS operations are characterized
by limited on-board energy, due to the vehicles’ size
and weight constraints, energy optimization is crucial
for the performance and execution of UAS missions.
Recently, FPGAs are gaining the race over GPUs in
clearly defined machine vision tasks, since hardware
is much faster than software. They lack the flexibil-
ity of GPUs and need more time to reprogram or fine
tune, but have significantly lower energy consump-
tion, and can be used to accelerate smaller computer
vision tasks, such as obstacle detection.
One of the most important risks for the wide adop-
tion of drones is related to their safe and secure op-
eration. Following the advances of the automotive
industry, it is critical to define similar industry-wide
frameworks for safety, that guarantee the conformity
of UAVs and UAS to the standards, and certifica-
tions of the underlying regulatory framework. In or-
der to efficiently address this challenge, it is of cru-
cial importance to create adequate real-world tests
and/or laboratory simulations for BVLOS operations
enabled by the aforementioned technologies that they
represent, being able to support a wide range of civil-
ian and military scenarios. Following methodologies
for human-machine corroboration, such as the cor-
roborative V &V (verification and validation) work-
flow presented in (Webster et al., 2020) it would be
possible to pass from formal verification scenarios,
to simulation-based testing and then to real experi-
ments. The knowledge resulting from such scenar-
ios will support decision-making and development of
technology road-maps based on robust future technol-
ogy assessment. Furthermore, this knowledge will
lower the barriers for end users to adopt the BVLOS
drone technologies, and obtain new and unforeseen
services at more manageable costs and effort.
Although UAS in general are a major technolog-
ical breakthrough, there are still several factors that
impede their adoption. The greatest challenge to the
widespread integration of UAS by the society is pub-
lic acceptance, since such operations raise novel and
valid concerns in terms of safety and privacy
1
. Pub-
lic acceptance is also subject to various concerns over
the safety of UAV flights over civilian air space, the
environmental disruption and the privacy of sensitive
information.
This article surveyed the main BVLOS drone op-
1
https://core.ac.uk/download/pdf/189596994.pdf
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
510

eration challenges an the requirements emerging from
them, with an emphasis on the technology aspects.
The article also surveyed the main technology ad-
vances that will play a critical role in the expansion
of BVLOS drone operations in the near future.
Despite all the technology advances regarding the
UAS operations, some open issues still need to be in-
vestigated, such as positioning, situation awareness,
risk detection and avoidance, flight investigation, and
energy consumption minimization. Apart from the
technology challenges and solutions there are also
several societal and regulatory challenges that must
be met. A concrete regulatory framework for BVLOS
operations must be formally defined, verified and vali-
dated, bringing trustful human-machine collaboration
in the front. On this basis, one of the most important
issues that could be addressed in the future, regarding
the BVLOS UAS provided services, is to establish ap-
propriate privacy and security mechanisms.
An in depth study of the legal, regulatory and
safety frameworks is among the next plans of our
work. Theoretical methodologies that have been
used for the formalisation of autonomous agents and
frameworks that have been tested in the automotive
industry will be examined in order to carefully de-
fine a trustworthy process for designing and deliver-
ing BVLOS operations.
ACKNOWLEDGEMENTS
This work is a part of ADACORSA project, that has
received funding from the ECSEL Joint Undertaking
(JU) under grant agreement No 876019. The JU re-
ceives support from the European Union’s Horizon
2020 research and innovation programme and Ger-
many, Netherlands, Austria, Sweden, Portugal, Italy,
Finland, Turkey national Authorities.
REFERENCES
Aber, J. S., Marzolff, I., Ries, J., and Aber, S. E. W. (2019).
Small-format aerial photography and UAS imagery:
Principles, techniques and geoscience applications.
Academic Press.
Akram, R. N., Markantonakis, K., Mayes, K., Habachi, O.,
Sauveron, D., Steyven, A., and Chaumette, S. (2017).
Security, privacy and safety evaluation of dynamic and
static fleets of drones. In 36th Digital Avionics Sys-
tems Conference (DASC), pages 1–12. IEEE.
Amorosi, L., Chiaraviglio, L., d’Andreagiovanni, F., and
Blefari-Melazzi, N. (2018). Energy-efficient mission
planning of uavs for 5g coverage in rural zones. In
2018 IEEE Int. Conf. on Environmental Engineering
(EE), pages 1–9. IEEE.
Anwar, A. and Raychowdhury, A. (2020). Autonomous
navigation via deep reinforcement learning for re-
source constraint edge nodes using transfer learning.
IEEE Access, 8:26549–26560.
Balachandran, S., Munoz, C., and Consiglio, M. C. (2017).
Implicitly coordinated detect and avoid capability for
safe autonomous operation of small uas. In 17th
AIAA Aviation Technology, Integration, and Opera-
tions Conference, page 4484.
Bassi, E. (2019). European drones regulation: Today’s legal
challenges. In 2019 Int. Conf. on Unmanned Aircraft
Systems (ICUAS), pages 443–450. IEEE.
Bijjahalli, S., Sabatini, R., and Gardi, A. (2020). Ad-
vances in intelligent and autonomous navigation sys-
tems for small UAS. Progress in Aerospace Sciences,
115:100617.
Bloise, N., Primatesta, S., Antonini, R., Fici, G. P., Gas-
pardone, M., Guglieri, G., and Rizzo, A. (2019). A
survey of unmanned aircraft system technologies to
enable safe operations in urban areas. In ICUAS 2019,
pages 433–442. IEEE.
Boutemedjet, A., Samardži
´
c, M., Rebhi, L., Raji
´
c, Z., and
Mouada, T. (2019). Uav aerodynamic design involv-
ing genetic algorithm and artificial neural network for
wing preliminary computation. Aerospace Science
and Technology, 84:464–483.
Carrio, A., Tordesillas, J., Vemprala, S., Saripalli, S., Cam-
poy, P., and How, J. P. (2020). Onboard detection and
localization of drones using depth maps. IEEE Access,
8:30480–30490.
Chmaj, G. and Selvaraj, H. (2015). Distributed processing
applications for uav/drones: a survey. In Progress in
Systems Engineering, pages 449–454. Springer.
Dasdemir, E., Köksalan, M., and Öztürk, D. T. (2020). A
flexible reference point-based multi-objective evolu-
tionary algorithm: An application to the uav route
planning problem. Computers & Operations Re-
search, 114:104811.
Davies, L., Bolam, R. C., Vagapov, Y., and Anuchin, A.
(2018). Review of unmanned aircraft system tech-
nologies to enable beyond visual line of sight (bvlos)
operations. In 2018 Int. Conf. on Electrical Power
Drive Systems (ICEPDS), pages 1–6. IEEE.
Fang, S. X., O’Young, S., and Rolland, L. (2018). Devel-
opment of small uas beyond-visual-line-of-sight (BV-
LOS) flight operations: System requirements and pro-
cedures. Drones, 2(2):13.
García, J., Molina, J. M., and Trincado, J. (2020). Real eval-
uation for designing sensor fusion in UAV platforms.
Information Fusion, 63:136–152.
González-Sieira, A., Cores, D., Mucientes, M., and
Bugarín, A. (2020). Autonomous navigation for uavs
managing motion and sensing uncertainty. Robotics
and Autonomous Systems, 126:103455.
Hassanalian, M. and Abdelkefi, A. (2017). Classifications,
applications, and design challenges of drones: A re-
view. Progress in Aerospace Sciences, 91:99–131.
Hosseini, N., Jamal, H., Haque, J., Magesacher, T., and Ma-
tolak, D. W. (2019). Uav command and control, navi-
gation and surveillance: A review of potential 5g and
satellite systems. In 2019 IEEE Aerospace Confer-
ence, pages 1–10. IEEE.
A Survey of UAS Technologies to Enable Beyond Visual Line Of Sight (BVLOS) Operations
511

Iacono, M. and Sgorbissa, A. (2018). Path following and
obstacle avoidance for an autonomous uav using a
depth camera. Robotics and Autonomous Systems,
106:38–46.
Jia, Y., Guo, L., and Wang, X. (2018). Real-time control
systems. In Transportation Cyber-Physical Systems,
pages 81–113. Elsevier.
Kato, N., Kawamoto, Y., Aneha, A., Yaguchi, Y., Miura, R.,
Nakamura, H., Kobayashi, M., Henmi, T., Akimoto,
O., Kamisawa, Y., et al. (2019). Location awareness
system for drones flying beyond visual line of sight
exploiting the 400 mhz frequency band. IEEE Wire-
less Communications, 26(6):149–155.
Kodheli, O., Guidotti, A., and Vanelli-Coralli, A. (2017).
Integration of satellites in 5g through leo constella-
tions. In GLOBECOM 2017-2017 IEEE Global Com-
munications Conference, pages 1–6. IEEE.
Kovalev, I., Voroshilova, A., and Karaseva, M. (2019).
Analysis of the current situation and development
trend of the international cargo uavs market. In Jour-
nal of Physics: Conference Series, volume 1399, page
055095. IOP Publishing.
Krishnan, P. and Manimala, K. (2020). Implementation of
optimized dynamic trajectory modification algorithm
to avoid obstacles for secure navigation of UAV. Ap-
plied Soft Computing, 90:106168.
Kyrkou, C., Timotheou, S., Kolios, P., Theocharides, T., and
Panayiotou, C. (2019). Drones: augmenting our qual-
ity of life. IEEE Potentials, 38(1):30–36.
Lin, C., He, D., Kumar, N., Choo, K.-K. R., Vinel, A., and
Huang, X. (2018). Security and privacy for the inter-
net of drones: Challenges and solutions. IEEE Com-
munications Magazine, 56(1):64–69.
Macias, M., Barrado, C., Pastor, E., and Royo, P. (2019).
The future of drones and their public acceptance. In
2019 IEEE/AIAA 38th Digital Avionics Systems Con-
ference (DASC), pages 1–8. IEEE.
Merkert, R. and Bushell, J. (2020). Managing the drone rev-
olution: A systematic literature review into the current
use of airborne drones and future strategic directions
for their effective control. Journal of Air Transport
Management, 89:101929.
Mohamed, N., Al-Jaroodi, J., Jawhar, I., Idries, A., and Mo-
hammed, F. (2020). Unmanned aerial vehicles appli-
cations in future smart cities. Technological Forecast-
ing and Social Change, 153:119293.
Mousavi, S., Afghah, F., Ashdown, J. D., and Turck, K.
(2019). Use of a quantum genetic algorithm for coali-
tion formation in large-scale uav networks. Ad Hoc
Networks, 87:26–36.
Nguyen, H. C., Amorim, R., Wigard, J., Kovacs, I. Z.,
and Mogensen, P. (2017). Using lte networks for
UAV command and control link: A rural-area cover-
age analysis. In 2017 IEEE 86th Vehicular Technology
Conference (VTC-Fall), pages 1–6. IEEE.
Nouacer, R., Hussein, M., Espinoza, H., Ouhammou, Y.,
Ladeira, M., and Castiñeira, R. (2020). Towards a
framework of key technologies for drones. Micropro-
cessors and Microsystems, page 103142.
Otto, A., Agatz, N., Campbell, J., Golden, B., and Pesch, E.
(2018). Optimization approaches for civil applications
of unmanned aerial vehicles (uavs) or aerial drones: A
survey. Networks, 72(4):411–458.
Outay, F., Mengash, H. A., and Adnan, M. (2020). Applica-
tions of unmanned aerial vehicle (uav) in road safety,
traffic and highway infrastructure management: Re-
cent advances and challenges. Transportation re-
search part A: policy and practice, 141:116–129.
Rakha, T. and Gorodetsky, A. (2018). Review of unmanned
aerial system (UAS) applications in the built environ-
ment: Towards automated building inspection pro-
cedures using drones. Automation in Construction,
93:252–264.
Santoso, F., Garratt, M. A., and Anavatti, S. G. (2017).
State-of-the-art intelligent flight control systems in
unmanned aerial vehicles. IEEE Transactions on Au-
tomation Science and Engineering, 15(2):613–627.
Sebbane, Y. B. (2018). Intelligent autonomy of UAVs: ad-
vanced missions and future use. CRC Press.
Undertaking, S. J. (2018). European atm master plan:
Roadmap for the safe integration of drones into all
classes of airspace. SESAR Joint Undertaking: Brus-
sels, Belgium.
van der Merwe, D., Burchfield, D. R., Witt, T. D., Price,
K. P., Sharda, A., M ˛acik, M., Gryta, A., Fr ˛ac, M.,
Dwivedi, S. L., Goldman, I., et al. (2020). Drones
in agriculture. Advances in Agronomy, 160:1.
Wang, C., Wang, J., Shen, Y., and Zhang, X. (2019).
Autonomous navigation of uavs in large-scale com-
plex environments: A deep reinforcement learning ap-
proach. IEEE Transactions on Vehicular Technology,
68(3):2124–2136.
Wang, J., Jiang, C., Han, Z., Ren, Y., Maunder, R. G., and
Hanzo, L. (2017). Taking drones to the next level: Co-
operative distributed unmanned-aerial-vehicular net-
works for small and mini drones. Ieee vehIcular tech-
nology magazIne, 12(3):73–82.
Wang, X., Hu, J., and Lin, H. (2020). An intelligent uav
based data aggregation strategy for iot after disaster
scenarios. In Proceedings of the 2nd ACM MobiCom
Workshop on Drone Assisted Wireless Communica-
tions for 5G and Beyond, pages 97–101.
Webster, M., Western, D., Araiza-Illan, D., Dixon, C., Eder,
K., Fisher, M., and Pipe, A. G. (2020). A corrobora-
tive approach to verification and validation of human–
robot teams. The International Journal of Robotics
Research, 39(1):73–99.
Xie, Y., Savvaris, A., and Tsourdos, A. (2019). Fuzzy logic
based equivalent consumption optimization of a hy-
brid electric propulsion system for unmanned aerial
vehicles. Aerospace Science and Technology, 85:13–
23.
Xu, X., Wang, T., Lu, Q., and Shi, Y. (2018). Resource con-
strained cellular neural networks for real-time obsta-
cle detection using FPGAs. In 2018 19th International
Symposium on Quality Electronic Design (ISQED),
pages 437–440. IEEE.
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
512
