
Strategic Coordination of Cooperative Truck Overtaking Maneuvers
Jan Cedric Mertens
1a
, Jürgen Hauenstein
1
, Frank Diermeyer
1b
and Andreas Zimmermann
2
1
Institute of Automotive Technology, Technical University of Munich, Garching b., München, Germany
2
Corporate Research, MAN Truck & Bus SE, München, Germany
Keywords: V2X, Cooperation, Truck Overtaking, Message Specification, Distributed State Machine, Connected Vehicles.
Abstract: This paper demonstrates how a cooperative truck overtaking maneuver can be coordinated and synchronized
via V2X. This is relevant because the classical truck overtaking maneuver imposes high stress on truck drivers,
which can lead to work absences or accidents. We define which abstract/atomic tasks are involved in the truck
overtaking maneuver and assign them to a distributed state machine. With the help of a V2X message we then
synchronize this state machine and exchange all information relevant for the overtaking maneuver. The
simulation of 600 overtaking scenarios demonstrates that the developed concept is adequate and that a
transmission frequency of 5 Hz offers the best trade-off between channel load and maneuver quality.
1 INTRODUCTION
In Germany, the volume of freight transport has
increased since 2015 from 4,470,468 kt annually by
1.5-2 % to 4,726,810 kt in 2018. In the same period,
the share of the total volume transported by road
transport increased from 78.1 % to 79.2 %
(Statistisches Bundesamt, 2020). Of this again, about
90 % is transported by truck (Statista, 2020). Thus, a
trend toward an increasing need for transportation by
truck becomes obvious. The Covid-19 pandemic has
also highlighted the need for and our dependence on
truck transportation. In March 2020, shortly before
the first lockdown in Germany, fears of supply chains
breaking down due to the effects of the pandemic
were already being fanned and an extreme strain on
truck drivers was predicted (Hecking, 2020). Shortly
afterwards, the MAN Truck & Bus SE for instance,
had to stop production, partly due to supply chains
breaking down (MAN Truck & Bus SE, 2020).
However, for the fact that despite the extreme
conditions the basic supply of goods in Germany
could be secured, Federal Minister Scheuer expressed
a big gratitude to all truck drivers and emphasized
their importance (Bundesministerium für Verkehr
und digitale Infrastruktur, 2020).
While the need for truck drivers is undisputed for
a sustainable supply and economy, Germany is also
a
https://orcid.org/0000-0002-4079-2730
b
https://orcid.org/0000-0003-1441-5226
faced with a severe driver shortage (Schlamp, 2020).
In addition, existing truck drivers are under extreme
stress during their working day, often caused by time
pressure and conflicts with other road users (Evers,
2010). The consequences of these strains are illnesses
(Bergrath, 2011) and accidents (Evers, 2010) For
example, the recent health reports of the insurance
companies show a peak of days-off-work per year in
transport and logistics occupations (approx. 30 %
above the average) and especially for vehicle drivers:
25 days per year, 70 % above the average (Bessel,
2020). Among the transportation professions, 27 % of
the days off work were caused by back pain, while
13 % were caused by mental illnesses categorized
according to ICD-10.
However, stress not only leads to illness, but also
to risky and error-prone driving (Evers, 2010). In
2018, 61 % of accidents with personal injuries
involving trucks on highways were caused by driver
error (Statistisches Bundesamt, 2018).
Our short-term goal is therefore to relieve truck
drivers through a cooperative truck overtaking
assistant in order to reduce lost working days and
accidents and to promote sustainable truck traffic.
The long-term goal is to prepare trucks for
cooperative autonomous driving functions. For these
goals, we have already published the concept of the
cooperative truck overtaking with optimized starting
points, velocity profiles (Mertens, Hauenstein,
Mertens, J., Hauenstein, J., Diermeyer, F. and Zimmermann, A.
Strategic Coordination of Cooperative Truck Overtaking Maneuvers.
DOI: 10.5220/0010447805130520
In Proceedings of the 7th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2021), pages 513-520
ISBN: 978-989-758-513-5
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
513

Diermeyer, Jahn, & Kraus, 2020) and reduced safety
distance (Mertens, Hauenstein, Diermeyer, & Kraus,
2020).
This paper starts in Section 2 with an overview of
V2X, Cooperative Truck Overtaking, and the
Collaborative Maneuver Protocol. In Section 3, it
continues to introduce the distributed state machine
for the strategic planning level and specify the
message for coordination. The following Section 4
describes our simulation setup and present the results
and discussions in before ending with a conclusion in
Section 5.
2 STATE OF THE ART
This section, gives a briefly review of V2X and
analysis of trends in this field over the last 20 years.
Afterwards it states approaches for cooperative truck
overtaking before presenting the Collaborative
Maneuver Protocol as a possibility for strategic
coordination. Afterwards a brief introduction to the
project IMAGinE with the participating partners and
goals is given.
2.1 V2X
An important step toward autonomous road traffic is
connectivity and cooperation between vehicles
(Mertens, Knies, et al., 2020). While it is still unclear
which technology will prevail for data exchange in
the future (WLAN or cellular based (Vukadinovic et
al., 2018)), the standardization of the messages to be
transmitted is progressing successfully. In Europe,
the Cooperative Awareness Message (CAM) (ETSI -
ITS, 2014a) and Decentralized Environmental
Notification Message (DENM) (ETSI - ITS, 2014b)
have already been specified by ETSI and the first
vehicles such as the VW Golf 8 or the VW ID.3 are
sending them as part of their standard equipment via
ITS-G5 (ADAC, 2020).
In addition to these so-called Day 1 messages, the
development of the Day 2 message Collective
Perception Message (CPM) (ETSI, 2020) is already
well advanced and will enable the exchange of sensor
information in the future. Following on from this, the
Maneuver Coordination Message (MCM) is being
developed for coordination and maneuver planning
via trajectories (CAR 2 CAR Communication
Consortium, 2019).
2.2 Cooperative Truck Overtaking
During truck overtaking maneuver, the safety
distances between the trucks before and after the lane
change are often greatly undercut and conflicts arise
with the car drivers because the truck blocks the
overtaking lane. As already mentioned in the
introduction, this can lead to high stress for the truck
drivers and to accidents. V2X may be used also
between trucks to optimize the truck overtaking
maneuver and there are four steps (Mertens,
Hauenstein, Diermeyer, Jahn, & Kraus, 2020):
Find an optimized overtaking position
Secure the reduced safety gap
Perform a cooperative lane change
Adjust the velocities during overtaking
While maneuver planning on a trajectory level
could e.g. coordinate the cooperative lane change
with MCM, agreeing on a certain overtaking point is
a strategic decision that requires a much longer
planning horizon than MCM allows. Therefore, a
different message type is needed which is discussed
in this paper.
2.3 Collaborative Maneuver Protocol
Oliver Sawade et al. have developed the
Collaborative Maneuver Protocol (CMP) with the
corresponding Collaborative Maneuver Message
(CMM) for the negotiation of cooperative maneuver
in ad-hoc networks between vehicles in 2018. The
objective of the CMP is to enable robust coordination
under byzantine network conditions. For this purpose,
function-specific distributed state machines are
designed in which each state assigns tasks for
different roles. For example, in a platooning scenario
the roles "leader" and "follower" could be
implemented, where the follower in one of the states
has the task to "follow with a small distance". To
synchronize the vehicles in a distributed state
machine, a session with all involved vehicles is
started and the roles are assigned. Within the session
each participant can start a vote for a state transition.
In case of a uniform decision, the chosen state is
transitioned and each participant takes over the task
assigned to its role there. To detect a
desynchronization or the failure of a session
participant, each vehicle sends a heartbeat message
with the hash of the current state (Sawade et al.,
2018).
The advantage of the CMP is that no specific
maneuver has to be planned in detail, but the
coordination takes place on a higher strategic and
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
514

abstract level. This increases robustness, since, for
example, deviations from specific trajectories can
occur more quickly and then lead to an abort of the
maneuver. In addition, the vehicles can be kept in a
synchronized state over a long period of time, which
makes it possible to make long-term strategic
decisions together. The individual function
implementation of the corresponding vehicle is then
responsible for the implementation of the role-
specific tasks. Thus, the CMP can be set on top of an
existing trajectory planning, which may differ from
vehicle to vehicle. The disadvantage is that the
specific trajectories are not coordinated between the
vehicles, so especially in highly dynamic scenarios,
maneuver can be planned better on trajectory level
than on a strategic level. Furthermore, although the
coordination and synchronization concepts are
generic, the distributed state machine must be
developed specifically for each function and initially
distributed to all vehicles.
2.4 IMAGinE
The IMAGinE project (Intelligent Maneuver
Automation - Cooperative Hazard Avoidance in
Real-Time) addresses cooperative driving maneuver
in 6 different scenarios, including turning on rural
roads, merging onto highways, and truck overtaking
(IMAGinE, 2016). The 12 consortium partners (Opel
Automobile GmbH, BMW AG, Mercedes-Benz AG,
MAN Truck & Bus SE, Volkswagen AG, Continental
Teves AG & Co. ohG, Robert Bosch GmbH, IPG
Automotive GmbH, Nordsys GmbH, WIVW GmbH,
Hessen Mobil - Straßen und Verkehrsmanagement,
Technische Universität München) are funded by the
German Federal Ministry for Economic Affairs and
Energy and aim to implement a collective perception
with subsequent cooperative maneuver planning in
simulation and real vehicles. Central to this is the
agreement on common and uniform message
specifications, in particular the CPM and MCM, with
which important experience is being gained in the
project for further specification and applications of
the messages.
In IMAGinE, the MAN Truck & Bus SE is
focusing in particular on the cooperative truck
overtaking maneuver. For this purpose, two test
vehicles were equipped with advanced sensors,
actuators, computing units and a communication
module for WLAN 802.11p.
3 METHODS
This section describes how the strategic planning
layer for the cooperative truck overtaking maneuver
is implemented and how the distributed state machine
is designed. It is also determined what information
needs to be exchanged and how it can be specified in
a message. At the end, our simulation setup as well as
the experiments are described. The main purpose of
the experiments is to demonstrate that the cooperative
maneuver coordination works and to investigate what
transmission frequency of the described message is
needed.
3.1 Strategic Planning
The truck overtaking maneuver requires a long
planning horizon, since the low differential speeds of
the trucks mean that long distances are covered from
the first contact via V2X to the completion of the
overtaking maneuver. A truck with a constant speed
of 80 km/h overtaking a 70 km/h truck travels from
the first contact via V2X at a communication range of
400 m about 3 km to the lane change into the
overtaking lane and further 1.1 km to the second lane
change. Such a long cooperative maneuver needs to
be coordinated at a strategic planning level (also
called behaviour or tactical level) (Gu et al., 2016),
since the planning horizon of an MCM at a trajectory
level is around 20 s, i.e. 440 m. Even though longer
MCMs can be constructed, it is impossible to predict
the position and velocity at 4 km distance accurately
enough for a trajectory planning level. On a strategic
level, it is enough to coordinate:
About where lane changes are to be made
How long the overtaking maneuver will take
What safety distances are necessary
Which type of cooperation is chosen
With this compact information, an unambiguous
overtaking maneuver can essentially be described. It
is not yet important, for example, to calculate the
exact trajectory for the lane change, but to formulate
abstract tasks that enable the execution of the
overtaking maneuver. The following distributed state
machine summarizes these tasks.
3.2 Distributed State Machine
As described by Sawade et al., a cooperative
maneuver can be broken down at the strategic level
into abstract tasks, which are then executed in a
coordinated manner by the participating vehicles
(Sawade et al., 2018). Execution in this context can
Strategic Coordination of Cooperative Truck Overtaking Maneuvers
515

mean, for example, that the underlying trajectory
maneuver planning is parameterized accordingly. For
the truck overtaking maneuver two roles are defined,
whose tasks differ per state: the overtaker and the
overtaken. Passenger cars, which of course also have
to be considered in the truck overtaking maneuver,
are not considered on the strategic level, since the
cooperation between passenger cars and trucks is
limited to the trajectory level during the first lane
change. In the following, the ten states with the
corresponding tasks are described:
1. Solo (not synchronized) - No truck in the
surrounding area or for all trucks determined
that overtaking is not practical.
2. Initialization - Information is exchanged and an
attempt is made to establish the roles for
Overtaker and Overtaken. If the assignment is
successful switch to 3.
3. Planning - Both: The overtaking maneuver is
planned and described by lane change, duration,
safety distances and cooperation mode. If both
trucks agree on the same overtaking maneuver,
switch to 4.
4. Approach - Overtaken: Follow your originally
planned Velocity-Profile. Overtaker: Adjust
speed continuously so that the overtaker reaches
the overtaken approximately at the time of the
planned lane change. If the safety distance to the
overtaken is ≤ 60 m change to 5.
5. Secure Gap (pre) - Overtaken: Transmit during
emergency braking, brake signals via V2X.
Overtaker: Reduce the safety distance secured
by the V2X messages and react to possible
emergency braking of the overtaken. Plan the
cooperative lane change with the vehicles in the
overtaking lane. When safety distance is
reached, change to 6.
6. Lane Change (to 2) - Overtaken: Send braking
signals via V2X in case of emergency braking.
Overtaker: Perform lane change to overtaking
lane and react to possible emergency braking.
When lane change is finished change to 7.
7. Pass - Overtaken: Reduce your speed within the
hysteresis. Overtaker: Increase your speed
within the hysteresis. When safety distance is
reached after overtaking maneuver change to 8.
8. Lane Change (to 1) - Overtaken: React to
possible emergency braking from the overtaker.
Overtaker: Execute the lane change to the first
lane and send brake signals via V2X in case of
emergency braking. When lane change is
finished switch to 9.
9. Secure Gap (post) - Overtaken: React to
possible emergency braking from the overtaker
and accelerate again to the desired speed.
Overtaker: Slow down again to desired speed
and send brake signals via V2X in case of
emergency braking. If the safety distance to the
overtaker is ≥ 50 m change to 10.
10. End - Overtaking maneuver is completed, both
continue at desired speed and reset all states.
In each state there are abort conditions, so that if
an overtaking maneuver is no longer useful or a
participant ends the cooperation prematurely, the
system returns to state 1. It should be noted that the
state changes do not depend on an absolute condition
specified in state 3. For example, the transition to the
lane change state does not depend on an absolute
position on the road, but on the relative position to the
overtaken. This allows that the overtaking maneuver
can be adapted dynamically even after the initial
planning and does not have to be aborted if minor
deviations occur.
3.3 Required Information
As already mentioned, it is not useful to use an MCM
over such a long planning horizon, since for example
the lateral location component can be reduced to the
two lane changes. However, for example, it is
indispensable to determine when the first possible
overtaking time point is, i.e. when the distance
between the overtaker and the overtaken has reached
the safety distance. To predict this point, the current
positions and the upcoming velocity profiles of both
trucks must be known. In “Cooperative Truck
Overtaking on Freeways” (Mertens, Hauenstein,
Diermeyer, Jahn, & Kraus, 2020) we investigated
how velocity profiles can be exchanged over V2X
and designed an ASN.1 specification that allows 7 km
long velocity profiles to be transmitted in a 33 Byte
message. The compression used resulted in an
average deviation of 0.1 m/s between the original and
the received velocity profile.
Now we want to go a step further and consider
how the velocity profiles were determined in the first
place. Most trucks today are equipped with a GPS
cruise control system that calculates an energy-
efficient velocity profile depending on the topology.
The main factors that go into this calculation are
(Passenberg et al., 2009):
Road topology
Position of the truck
Desired speed: V
set
Hysteresis with speed variation: H
min
H
max
Weight of the truck: W
Engine model: E
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
516
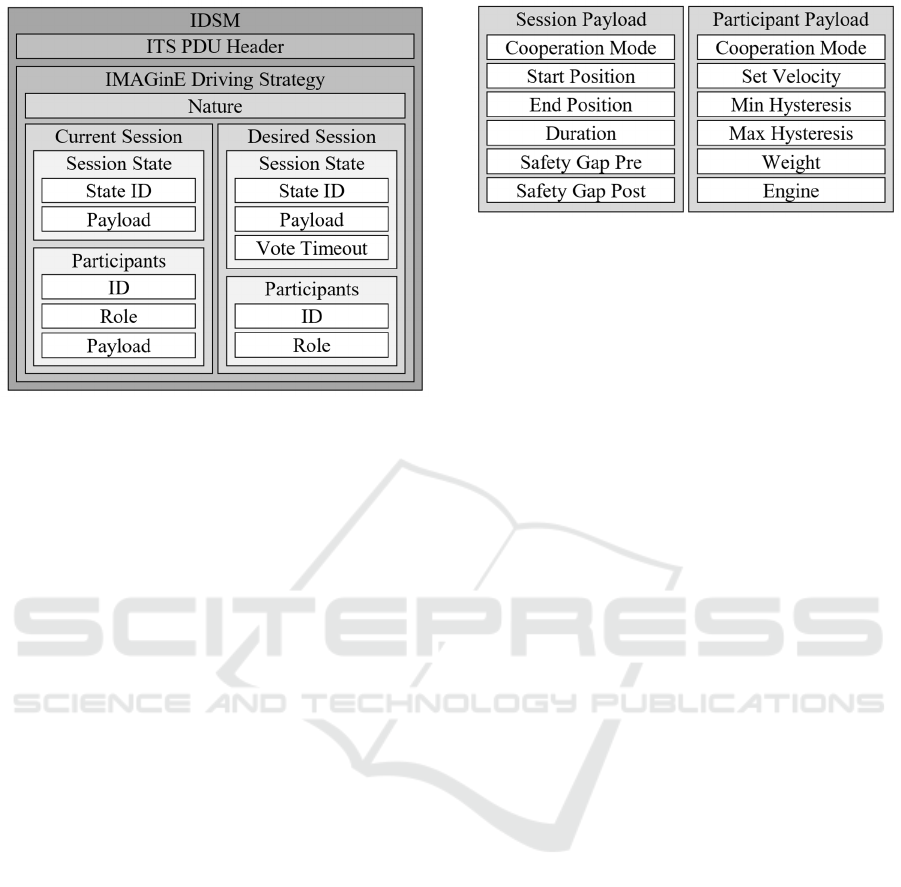
Figure 1: IMAGinE Driving Strategy Message
specification.
Under the assumption that both trucks have a GPS
cruise control that deliver approximately the same
results with the same input, it is sufficient to transmit
only the initial parameters for its calculation instead
of the complete velocity profile. Since the road
topology is already available in both trucks and the
position is sent via the CAM, only V
set
, H
min
, H
max
, W
and E remain, which can be transmitted more
compactly than a velocity profile. This information
also allows us to determine the reduced safety
distance, which depends mainly on the weight and the
velocity. In the next step, we will embed this required
information into a message to synchronously run
through the distributed state machine and plan the
overtaking maneuver.
3.4 IDSM Message
In order to synchronize the vehicles in the distributed
state machine and exchange the required information
for planning the overtaking maneuver, a message
needs to be specified. Building on the CMP and the
CMM of Sawade et al., the IMAGinE project
designed the IMAGinE Driving Strategy Message
(IDSM). Figure 1 shows the main elements of the
IDSM. Beside the header it contains the IDS which
indicates via Nature which function and thus which
state machine is active. Furthermore, the current
session and an optional desired session are included.
These contain in each case a state with the ID and
Payload of the current and the desire state. In the
desired state there is also a timeout, for how long can
be voted for it. The last elements of the sessions are
the
participant
lists
with
the
corresponding
IDs
and
Figure 2: Payload for Cooperative Truck Overtaking.
their roles. In the current state, each vehicle can add a
payload to its participant entry to share details about
itself. This message is thus generic in the sense that
arbitrary state machines can be traversed
synchronously. Once a session is initiated, each
participant in the session can send a desired state in
addition to the current state. As soon as all
participants send the same desired state, the system
switches synchronously to this state.
The payloads in the IDSM are defined as a byte
array so that specific content can be appended
depending on the function activated. Figure 2 shows
the payload for the Cooperative Truck Overtaking
Maneuver and contains the information derived in
Section 3.1 and Section 3.3.
3.5 Simulation
To test the coordination of the cooperative overtaking
maneuver between two trucks with the IDSM, we
implemented a simulation environment and a
dashboard for visualization. The simulation of the
two trucks is implemented in ROS-Kinetic (ROS,
2018) and ego data as well as simulated CAMs are
provided as ROS-topic. For each truck one instance
of the Cooperative Truck Overtaking Assistant is
running which receives the data and provides IDSMs
as ROS-topic for the other truck. Except for the lane
changes, the trucks always drive on lane center and
the speed of the trucks is directly controlled by the
Cooperative Truck Overtaking Assistant. The
calculation of the speed profiles is based on the
already published tool "Truck Overtaking Analyser"
which has now been extended by the coordination
with the Distributed State Machine and the IDSM.
3.6 Experimental Setup
With the described simulation a series of tests with
two objectives has been performed. Firstly, we
wanted to see whether the strategic coordination
concept works and whether the overtaking maneuvers
Strategic Coordination of Cooperative Truck Overtaking Maneuvers
517

as planned by the "Truck Overtaking Analyzer" are
actually realized. On the other hand, we wanted to
investigate which transmission frequency is
necessary to achieve this. For this purpose, 100
scenarios for cooperative truck overtaking maneuvers
with 1, 2, 3, 5, 7 and 10 Hz each were simulated while
logging details like lane change positions, duration,
number of messages sent and time in each state. The
100 scenarios were set up so that all were performed
in Active Cooperative mode, both trucks had a total
mass of 25 t, and the overtaken started 200 m ahead
of the overtaker. The starting position of the overtaker
went in 1 km steps from 3 km to 102 km on a 116 km
long section of the A8 from Ulm to Munich with
original elevation profile. 50 % of the scenarios were
to be performed with reduced safety distance and the
speeds were set at 20 % each as follows (Overtaker
[km/h] / Overtaken [km/h] / Hysteresis [±km/h]):
80/70/5, 85/75/5, 75/70/7, 80/77/7, 85/80/7. The
order of all overtaking maneuvers remained the same,
so that they differed in the six runs only by the
transmission frequency of the IDSM.
4 RESULTS AND DISCUSSON
The described tests were carried out at real speed and
no problems or failures occurred. In total, about
30 hours of truck driving were simulated and 600
overtaking maneuvers were successfully coordinated
and executed. Now we need to determine which
IDSM frequency provides the best trade-off between
message count, i.e. channel load, and coordination
quality. For this, it is assumed in the following that
the overtaking maneuver can be coordinated best with
a high frequency, since queries can be exchanged
more frequently and the delay is low. Therefore, for
our experiments, 10 Hz is selected as reference.
Figure 3: Mean±Sigma for overtaking duration and
message count at different IDSM Frequencies.
Figure 3 shows the influence of the IDSM frequency
on the average overtaking time and the average
number of messages transmitted. As the frequency
increases, the number of messages increases and so
does the channel load. Further, it is noticeable that the
average overtaking time differs from the reference by
only 0.08 s even at 1 Hz. It is obvious, however,
that the standard deviation of the average overtaking
Figure 4: The correlation of overtaking duration and lane change position between lower IDSM Frequencies and 10 Hz.
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
518

duration increases with falling frequency. Thus,
deviations from the optimal overtaking maneuver
occur more frequently
Since this can have an effect on more than just the
overtaking duration, we also considered the position
of the first lane change in the next step. Figure 4
shows the correlation of the overtaking time and lane
change position at 1, 2, 4, 5 and 7 Hz to our 10 Hz
reference. While there is a strong correlation of
R
2
= 0.98 for duration and R
2
= 0.99 for position for
5 Hz and 7 Hz, the correlation drops steadily to
R
2
= 0.92 and R
2
= 0.91 at 1 Hz.
We conclude that the best trade-off between
tuning and channel load is established at an IDSM
frequency of 5 Hz. However, as a kind of dynamic
congestion control, the frequency can be reduced to
3 Hz or 2 Hz if the current channel load requires it.
While the coordination with 1 Hz still worked
successfully, more frequent overtaking maneuvers
were performed which deviated from the optimal
overtaking maneuver. The coordination of the
cooperative truck overtaking maneuver with 1 Hz
should therefore be avoided. This is also confirmed
by our last investigation. Figure 5 shows how the
average time spent in each state differs from the
references. In particular, at 1 Hz there are large
deviations that clearly stand out from those of the
other frequencies.
Figure 5: Average time spent in each state at different
IDSM frequencies compared to 10 Hz.
5 CONCLUSIONS
It was demonstrated that the truck overtaking
maneuver can be coordinated and executed
cooperatively at a strategic level using a distributed
state machine. To synchronize the vehicles in the
distributed state machine, a message is required that
groups the participants in a session and enables
coordination for a transition to a new desired state.
For this, the IMAGinE project specified a generic
message on which we built and added a truck
overtaking specific payload. Using this message, 600
overtaking maneuvers at different transmission
frequencies were simulated, and all overtaking
maneuvers were successfully planned and completed.
Our subsequent investigation showed that a
transmission frequency of 5 Hz provided the best
trade-off between channel load and overtaking
maneuver quality.
Having demonstrated in “Cooperative Truck
Overtaking on Freeways” how a cooperative truck
overtaking maneuver can be optimally planned, we
now have the capability to coordinate this planning
between two vehicles via V2X. The next step will be
the integration of our system into two trucks to
investigate the cooperative truck overtaking
maneuver not only in simulation but in real field tests.
A resulting assistance system would have the
potential to relieve the truck driver and lead to a more
sustainable working environment and is a step
towards autonomous truck traffic in the long term.
ACKNOWLEDGEMENTS
Research supported by MAN Truck & Bus SE and the
IMAGinE project (Intelligent Maneuver Automation
- cooperative hazard avoidance in real-time).
IMAGinE is founded by the German Federal Ministry
for Economic Affairs and Energy (BMWi).
CONTRIBUTIONS
J.C.M. (first and corresponding author) initiated the
idea of the paper and contributed to the
conceptualization, methodology, software,
investigation and writing of the original draft. J.H.
supported the methodology and investigation with
insights and discussions. F.D. and A.Z. made an
essential contribution to the conception of the
research project and revised the paper critically for
intellectual content. F.D. and A.Z. give final approval
for the version to be published and agree to all aspects
of the work. As a guarantor, F.D. accepts
responsibility for the overall integrity of the paper.
Strategic Coordination of Cooperative Truck Overtaking Maneuvers
519

REFERENCES
ADAC. (2020). C2X im VW Golf 8: Erster ADAC Test.
https://www.adac.de/rund-ums-fahrzeug/tests/assistenz
systeme/c2x-im-vw-golf-8/
Bergrath, J. (2011). Der Job des Lkw-Fahrers verursacht
Krankheiten. https://www.eurotransport.de/artikel/lkw-
fahrer-haben-berufskrankheiten-384486.html.
Bessel, S. (2020). TK Gesundheitsreport 2020:
Arbeitsunfähigkeiten.
Bundesministerium für Verkehr und digitale Infrastruktur.
(2020). #Covid-19 Straßenverkehr. https://www.bm
vi.de/SharedDocs/DE/Artikel/K/Corona/strassenverke
hr-covid-19.html.
CAR 2 CAR Communication Consortium (2019).
Guidance for day 2 and beyond roadmap.
ETSI. (2020). Intelligent Transport Systems (ITS);
Cooperative Perception Services. https://portal.etsi.
org/webapp/WorkProgram/Report_WorkItem.asp?wki
_id=46541.
ETSI - ITS (2014a). Basic Set of Applications; Part 2:
Specification of Cooperative Awareness Basic Service.
EN 302 637-2 - V1.3.1 - Intelligent Transport Systems
(ITS); Vehicular Communications; (ETSI-CAM-14).
ETSI - ITS (2014b). Basic Set of Applications; Part 3:
Specifications of Decentralized Environmental
Notification Basic Service. EN 302 637-3 - V1.2.1 -
Intelligent Transport Systems (ITS); Vehicular
Communications; (ETSI-DENM-14).
Evers, C. (2010). Auswirkungen von Belastungen und
Stress auf das Verkehrsverhalten von Lkw-Fahrern.
Bundesanstalt Für Straßenwesen - Forschung Kompakt.
Gu, T., Dolan, J. M., & Lee, J.‑W. (Eds.) (2016, October).
Automated Tactical Maneuver Discovery, Reasoning
and Trajectory Planning for Autonomous Driving. IEEE.
Hecking, C. (2020). Industrie-Lieferketten unter Druck.
Spiegel. https://www.spiegel.de/wirtschaft/unterneh
men/covid-19-lieferketten-in-gefahr-a-d0735376-540a-
4b25-b876-8a14d7470f17.
IMAGinE. (2016). Solutions for Cooperative Driving.
https://imagine-online.de.
MAN Truck & Bus SE. (2020, March 19). Corona-
Entwicklung: MAN Truck & Bus stoppt die Produktion.
https://press.mantruckandbus.com/corona-
entwicklung-man-truck--bus-stoppt-die-produktion/
Mertens, J. C., Hauenstein, J [Jurgen], Diermeyer, F.,
Jahn, L., & Kraus, S. (2020). Cooperative Truck
Overtaking on Freeways. Fifteenth International
Conference on Ecological Vehicles and Renewable
Energies (EVER), 1–15. https://doi.org/10.1109/
EVER48776.2020.9243145.
Mertens, J. C., Hauenstein, J [Jürgen], Diermeyer, F., &
Kraus, S. (2020). Reduced Safety Distance during
Cooperative Truck Overtaking. Fifteenth International
Conf. on Ecological Vehicles and Renewable Energies
(EVER).
Mertens, J. C., Knies, C., Diermeyer, F., Escherle, S., &
Kraus, S. (2020). The Need for Cooperative Automated
Driving. Electronics, 9(5), 754. https://doi.org/10.
3390/electronics9050754.
Passenberg, B., Kock, P., & Stursberg, O. (2009).
Combined time and fuel optimal driving of trucks based
on a hybrid model. European Control Conference
(ECC). Advance online publication. https://doi
.org/10.23919/ECC.2009.7075185.
ROS. (2018). Kinetic Kame
. www.wiki.ros.org/kinetic.
Sawade, O., Schulze, M., & Radusch, I. (2018). Robust
Communication for Cooperative Driving Maneuvers.
IEEE Intelligent Transportation Systems Magazine,
10(3), 159–169. https://doi.org/10.1109/MITS.
2018.2842241.
Schlamp, C. (2020, March 18). LKW Fahrermangel:
Tausende LKW Fahrer fehlen.: Sind Arbeitskräfte aus
Nicht-EU-Ländern die Lösung? Lkw-Fahrer-Gesucht.
https://lkw-fahrer-gesucht.com/fernfahrer-magazin/32/
lkw-fahrermangel-was-tun.html.
Statista. (2020). Anteil der Lkw an der Transportleistung im
Güterverkehr in Deutschland in den Jahren von 2013
bis 2023: Verkehr & Logistik - Fahrzeuge &
Straßenverkehr. https://de.statista.com/statistik/daten
/studie/12195/umfrage/anteil-der-lkw-am-gueterverke
hr-in-deutschland/
Statistisches Bundesamt (2018). Verkehrsunfälle - Unfälle
von Güterkraftfahrzeugen im Straßenverkehr.
Statistisches Bundesamt. (2020). Beförderungsmenge und
Beförderungsleistung nach Verkehrsträgern:
Güterverkehr. https://www.destatis.de/DE/Themen/Bra
nchen-Unternehmen/Transport-Verkehr/Gueterverkehr/
Tabellen/gueterbefoerderung-lr.html.
Vukadinovic, V., Bakowski, K., Marsch, P., Garcia, I. D.,
Xu, H., Sybis, M., Sroka, P., Wesolowski, K., Lister,
D., & Thibault, I. (2018). 3GPP C-V2X and IEEE
802.11p for Vehicle-to-Vehicle communications in
highway platooning scenarios. Ad Hoc Networks, 74,
17–29. https://doi.org/10.1016/j.adhoc.2018.03.004.
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
520
