
A Novel Method for Object Detection using Deep Learning and CAD
Models
Igor Garcia Ballhausen Sampaio
1
, Luigy Machaca
1
, Jos
´
e Viterbo
1 a
and Joris Gu
´
erin
2 b
1
Computing Institute, Universidade Federal Fluminense, Brazil
2
LAAS-CNRS, ONERA, Universit
´
e de Toulouse, France
Keywords:
Object Detection, CAD Models, Synthetic Image Generation, Deep Learning, Convolutional Neural Network.
Abstract:
Object Detection (OD) is an important computer vision problem for industry, which can be used for quality
control in the production lines, among other applications. Recently, Deep Learning (DL) methods have enabled
practitioners to train OD models performing well on complex real world images. However, the adoption of
these models in industry is still limited by the difficulty and the significant cost of collecting high quality
training datasets. On the other hand, when applying OD to the context of production lines, CAD models of
the objects to be detected are often available. In this paper, we introduce a fully automated method that uses a
CAD model of an object and returns a fully trained OD model for detecting this object. To do this, we created
a Blender script that generates realistic labeled datasets of images containing the object, which are then used
for training the OD model. The method is validated experimentally on two practical examples, showing that
this approach can generate OD models performing well on real images, while being trained only on synthetic
images. The proposed method has potential to facilitate the adoption of object detection models in industry as
it is easy to adapt for new objects and highly flexible. Hence, it can result in significant costs reduction, gains
in productivity and improved products quality.
1 INTRODUCTION
Recently, Deep Learning (DL) has produced excellent
results for Object Detection (OD) (Liu et al., 2020).
On the one hand, a typical limitation with DL is the
requirement of large labeled datasets for training. In-
deed, although there are various large databases avail-
able online for OD, for specific industrial applications
it is always necessary to create custom datasets con-
taining the objects of interest. While the scenarios
present in public datasets are useful from both a re-
search and application standpoint, it was found that
industrial applications, such as bin picking or defect
inspection, have quite different characteristics that are
not modeled by the existing datasets (Drost et al.,
2017). As a result, methods that perform well on ex-
isting datasets sometimes show different results when
applied to industrial scenarios without retraining. The
process of generating a specific dataset for retraining
is tedious, and can be error-prone when conducted by
non-professional technicians. Moreover, generating a
a
https://orcid.org/0000-0002-0339-6624
b
https://orcid.org/0000-0002-8048-8960
new dataset and labeling it manually can be very time
consuming and expansive (Jabbar et al., 2017).
On the other hand, OD for industrial production
lines presents the specificity that the manufacturers
often have access to the CAD models of the objects
to detect. Thanks to advances in computer graphics
techniques, such as ray tracing (Shirley and Morley,
2003), the generation of photo-realistic images is now
possible. In such artificially generated images, the
computer can be employed to obtain bounding box la-
beling for free. The use of synthetic images rendered
from CAD models to train OD models has already
been proposed in (Peng et al., 2015), (Rajpura et al.,
2017) and (Hinterstoisser et al., 2018). However, their
approaches are not automated as they require manual
scene creation by Blender artists. In addition, the ob-
jects used in these works are usually generic, such as
buses, airplanes, cars or animals.
The main contribution of this paper is to present a
new method for training OD models in synthetic im-
ages generated from CAD models that is fully auto-
matic and thus well suited for industrial use. The pro-
posed method consists of the automatic generation of
realistic labeled images containing the objects to be
Sampaio, I., Machaca, L., Viterbo, J. and Guérin, J.
A Novel Method for Object Detection using Deep Learning and CAD Models.
DOI: 10.5220/0010451100750082
In Proceedings of the 23rd International Conference on Enterprise Information Systems (ICEIS 2021) - Volume 1, pages 75-82
ISBN: 978-989-758-509-8
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
75

detected, followed by the fine-tuning of a pretrained
OD model on the artificial dataset. An extensive study
is conducted to properly select the user-defined pa-
rameters so that it maximizes the performance on real
world images. Our method is evaluated using the
CAD models of two industrial objects for training, as
well as real labeled images containing the objects for
evaluation. The results obtained are very promising
as we manage to get F1-scores above 90% on real im-
ages while training only on synthetic images.
This paper is organized as follows. Section 2
presents the related work in the field of object de-
tection and deep learning for industry. Section 3
provides detailed explanations about the proposed
method created. Section 4 describes our experiments,
presents the results obtained and discusses them. Fi-
nally, conclusions and directions for future work are
presented in Section 5.
2 RELATED WORK
This section presents related work about OD, indus-
trial applications of DL-based computer vision, as
well as computer vision methods using CAD models.
2.1 Object Detection
OD is a challenging computer vision problem that
consists in locating instances of objects from prede-
fined categories in natural images (Prasad, 2012). It
has many applications in various domains such as
autonomous driving, security and medical diagno-
sis (Xiao et al., 2020). Deep learning techniques have
emerged as a powerful strategy for learning character-
istic representations directly from data and have led to
significant advances in the field of generic object de-
tection (Liu et al., 2020). In the last decade, many
competitions for object detection have been held to
provide large annotated datasets to the community,
and to unify the benchmarks and metrics for fair
comparison between proposed methods (Everingham
et al., 2010), (Lin et al., 2014), (Zhou et al., 2017),
(Kuznetsova et al., 2018).
Some examples of OD methods proposed within
the last few years include (He et al., 2015), where
the author proposes a new network structure, called
SPP-net, which can generate a fixed-length represen-
tation, regardless of the size/scale of the image. Other
works such as (Jana et al., 2018) aim to improve pro-
cessing speed and at the same time efficiently identify
objects in the image. Finally, deeper CNNs have led
to record-breaking improvements in the detection of
more general object categories, a shift which came
about when DCNNs began to be successfully applied
to image classification (Liu et al., 2020).
2.2 OD for Industrial Applications
Although general purpose OD methods have greatly
improved thanks to the availability of large public
datasets, the detection of instances in the industrial
context must be approached differently, since anno-
tated images are generally not available or rare. In-
deed, to train a deep learning model, hundreds of an-
notated images for each object category are needed.
Specific datasets need to be collected and annotated
for different target applications. This process is time-
consuming and laborious, and increases the burden on
operators, which goes against the goal of industrial
automation (Cohen et al., 2020), (Ge et al., 2020).
A public datasets adapted to the industrial context
was developed in (Drost et al., 2017). Unlike other
3D object detection datasets, this work models in-
dustrial waste collection and object inspection tasks
that often face different challenges. In addition, the
evaluation criteria are focused on practical aspects,
such as execution times, memory consumption, use-
ful measures of correction and precision. Other ex-
amples of datasets adapted to the industrial context in-
clude (Gu
´
erin et al., 2018b) and (Gu
´
erin et al., 2018a).
Finally, in (Yang et al., 2019), a method to detect
defects of tiny parts in real time was developed, based
on object detection and deep learning. To improve
their results, the authors consider the specificities of
the industrial application in their method such as the
properties of the parts, the environmental parameters
and the speed of movement of the conveyor. This is
a good example to adapt OD training methods to the
specific constraints of the industrial context.
2.3 CAD Models and OD
The first commercial CAD programs came up in the
1970s, providing functions for 2D-drawing and data
archival, and evolved into the main engineering de-
sign tool (Lindsay et al., 2018), (Hirz et al., 2017).
These models can provide a scalable solution for
intelligent and automatic object recognition, track-
ing and augmentation based on generic object mod-
els (Ben-Himane et al., 2010). For example, CAD
models have been used to support multi-view detec-
tion (Zhang et al., 2013). In (Peng et al., 2015),
3D models were used as the primary source of infor-
mation to build object models. In other works, 3D
CAD models were used as the only source of labeled
data (Lin et al., 2014), (Everingham et al., 2010), but
they are limited to generic categories, such as cars and
ICEIS 2021 - 23rd International Conference on Enterprise Information Systems
76

motorcycles .
3 PROPOSED METHOD
An overview of this proposed method can be seen in
Figure 1. First, a custom Blender code is used to gen-
erate labeled training images containing the rendered
CAD model in context. Then, a pretrained object de-
tection model is fine-tuned on the generated dataset.
Finally, the model can be used for inference on real
images (Figure 1b).
3.1 Image Generation
For the automatic generation of the training images,
the software Blender (Blender Online Community,
2018) is used. Blender is a powerful software for 3D
design, which includes features such as modeling, rig-
ging, simulation and rendering. Blender has a good
Python API, is open-source and has good GPU sup-
port.
In order to generate a synthetic training image
sample, our code requires several elements. First, a
CAD model of the object of interest as well as several
other industrial CAD models need to be available. In
the experiments of this paper, we use the two objects
shown in Figure 2, for which we also have real world
test images. The other objects serve as distractors
to help the model focusing on the right object. The
CAD models for the distractors are gathered from the
Grabcad website
1
. Different textures for the different
distractors as well as for the background are gathered
from the Poliigon website
2
. Finally, the color and tex-
ture of the object of interest are reproduced manually.
Once we have access to all the elements above,
the generation code goes as follows. A floor and a
table are created and some distractors are sampled.
Using physics simulation, the distractors are dropped
from a random height on the table. The position of
the object of interest is also randomly sampled. Once
the 3D scene is created, textures and colors are sam-
pled for the backgrounds and the distractors and the
entire scene is textured. Light sources and cameras
are also sampled and placed randomly. Constraints
on the camera pose are applied, in order to ensure that
the object appears in the camera view. Once the scene
has been created, the rendering occurs and generates
an image. By removing the light sources and mak-
ing the object of interest a light source itself, we can
generate another image which can be used for bound-
ing box labeling. This procedure is necessary because
1
https://grabcad.com/
2
https://www.poliigon.com/
even if we know the location of the object, it can be
partly hidden by distractors and thus distort the la-
beling. Example images generated using our Blender
code can be seen in Figure 3.
3.2 Model Training
In this work, we did not train a new CNN architecture
from the scratch. Instead, we used one of the pre-
trained models provided by TensorFlow Object De-
tection API (Huang et al., 2017). This approach is
called transfer learning and consists in starting train-
ing from a model that already knows basic feature ex-
traction skills and is less likely to overfit the synthetic
datasets. Indeed, the diversity that we can create with
Blender is limited as we cannot get an infinite amount
of textures and distractors, and the diversity already
encountered by the network during pre-training can
help reduce overfitting. In addition, using a network
pre-trained on real images can prevent the network
from learning detection features that depend too much
on the generation procedure.
There exists several models in the TensorFlow
OD model zoo. More information on the perfor-
mance of the detection, as well as the reference ex-
ecution times, for each of the available pre-trained
models, can be found on the Github page of the
API
3
. In practice, the model used in this paper is the
faster rcnn inception v2 coco model, which provides
a good trade-off between performance and speed.
Faster R-CNN, the model used in this work, takes
as input an entire image and a set of object propos-
als. The network first processes the whole image with
several convolutional and max pooling layers to pro-
duce a convolutional feature map. Then, for each
object proposal, a region of interest (RoI) pooling
layer extracts a fixed-length feature vector from the
feature map. Each feature vector is fed into a se-
quence of fully connected layers that finally branch
into two sibling output layers: one that produces soft-
max probability estimates over K object classes plus
a catch-all “background” class and another layer that
outputs four real-valued numbers for each of the K
object classes. Each set of 4 values encodes refined
bounding-box positions for one of the K classes. For
a more detailed view about Faster-RCNN, we refer
the reader to the original paper (Ren et al., 2015), or
to the following tutorial (Ananth, 2019).
To train the final OD model, the TensorFlow OD
API requires a specific file structure of the training
images and labels. This step is carried out automati-
cally by our script.
3
https://github.com/tensorflow/models
A Novel Method for Object Detection using Deep Learning and CAD Models
77
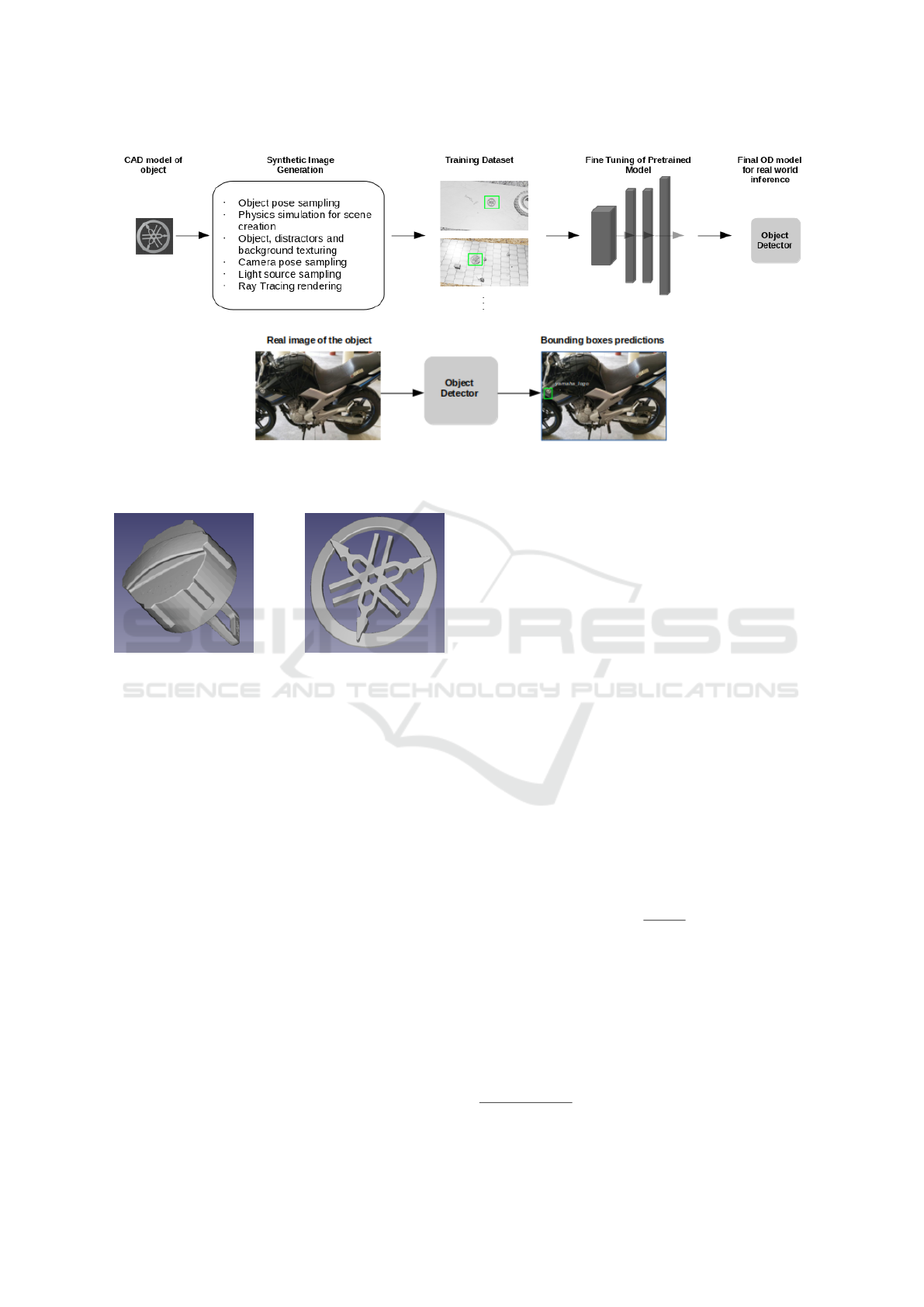
(a) Training
(b) Inference
Figure 1: Overview of the proposed method for training an object detection network using a CAD model.
(a) Adblue (b) Yamaha logo
Figure 2: CAD models used in our experiments.
3.3 Parameter Selection Procedure
The Blender script used for image generation has
many hyperparameters that must be chosen before us-
ing it, such as the number of distractors, the number
of scenes generated or the resolution of synthetic im-
ages. Hence, we conduct a set of experiments to prop-
erly select these parameters in order to optimize the
OD results for inference on real images. In this sec-
tion, we explain the parameter selection procedure.
In other words, we present the dataset on which the
different sets of parameters were evaluated, as well as
the metrics used to assess the quality of the results ob-
tained with a given set of parameters. The results ob-
tained for this parameter selection procedure are pre-
sented in Section 4.
3.3.1 Test Dataset
The objective of this work is to validate that an object
detector trained on synthetic images can generalize
to real world industrial cases. Hence, we use a test
dataset composed of 380 real images containing the
objects corresponding to the CAD models used for
training. The bounding box annotation files for the
test images are generated manually using a software
called LabelImg
4
. This application allows us to draw
and save the annotations of each image as xml files in
the PASCAL VOC format (Everingham et al., 2010).
3.3.2 OD Metrics
In order to evaluate the quality of the trained model on
real images, and thus to be able to select the best hy-
perparameters for image generation and training, we
used standard OD metrics that are presented here.
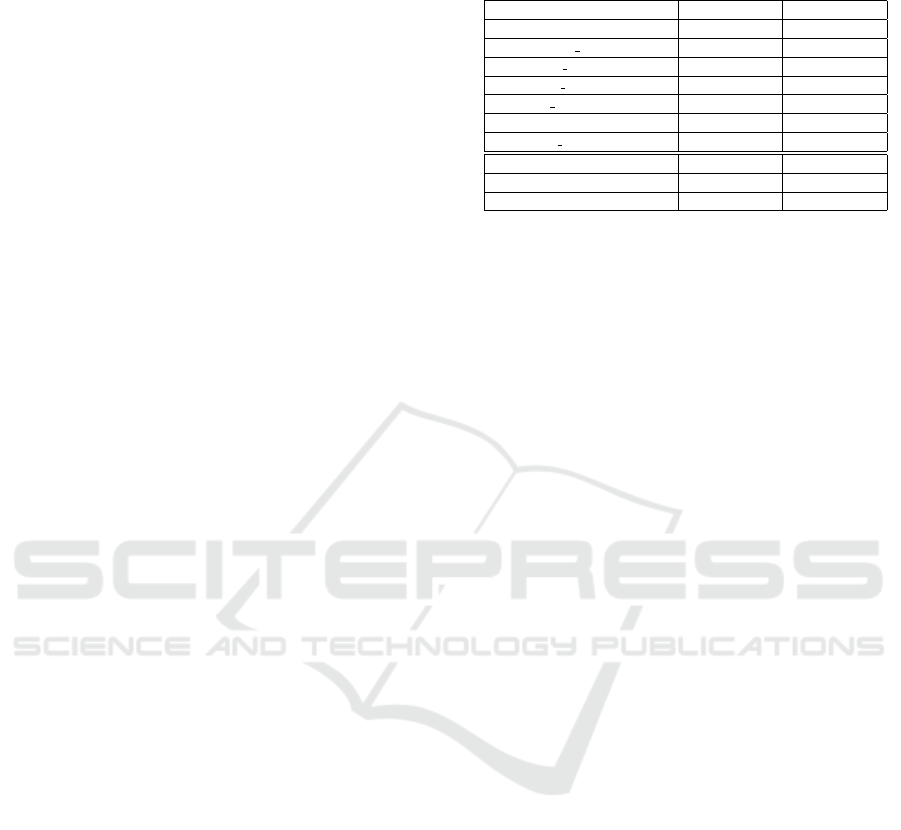
Intersection over Union (IoU): is an evaluation
metric used to measure how much a predicted bound-
ing box matches with a ground truth bounding box.
For a pair of bounding boxes, IoU is defined as the
area of the intersection divided by the area of the
union (Figure 4). If A corresponds to the ground-truth
box and B to the predicted box, then, IoU is computed
as :
IoU =
|A ∩ B|
|A ∪ B|
, (1)
where |.| denotes the area of a given shape. The nu-
merator is called the overlap area and the denomina-
tor is called the combined area. IoU ranges between 0
and 1, where 1 means that the bounding boxes are the
same and 0 that there is no overlap.
Precision, Recall, F1-Measure. We call confi-
dence score, the probability that an anchor box con-
4
https://github.com/tzutalin/labelImg
ICEIS 2021 - 23rd International Conference on Enterprise Information Systems
78
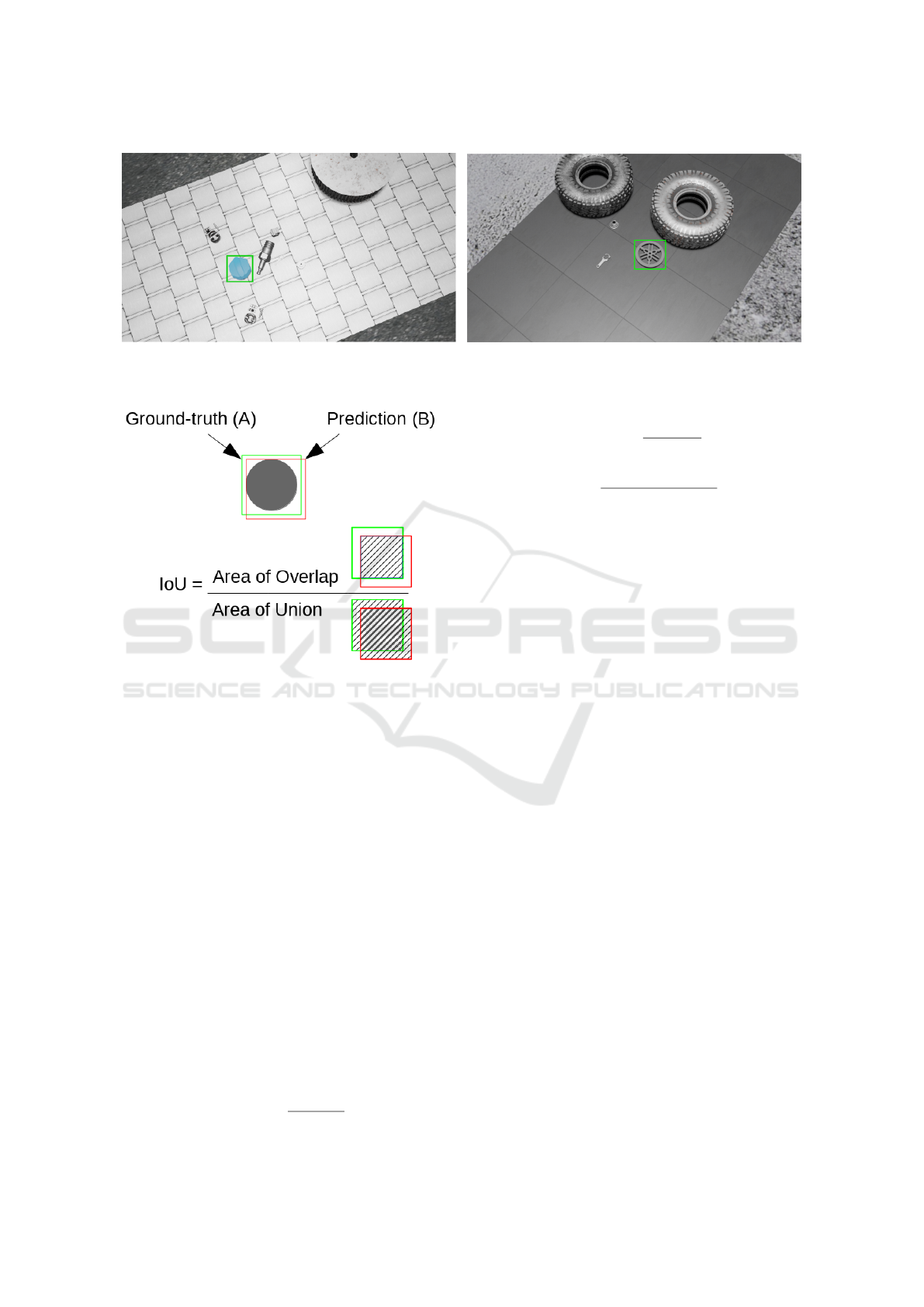
(a) Adblue (b) Yamaha logo
Figure 3: Example of images generated using our custom Blender script.
Figure 4: Intersection over Union (IoU) computation.
tains an object from a certain class. It is usually pre-
dicted by the classifier part of the object detector. The
confidence score and IoU are used as the criteria to
determine whether a detection is a true positive or a
false positive. Given a minimal threshold on the con-
fidence score for bounding box acceptance, and an-
other threshold on IoU to identify matching boxes, a
detection is considered a true positive (TP) if there
exists a ground truth such that: confidence score >
threshold; the predicted class matches the class of the
ground truth; and IoU > threshold
IoU
. The violation
of any of the last two conditions generates a false pos-
itive (FP). In case multiple predictions correspond to
the same ground-truth, only the one with the highest
confidence score counts as a true positive, while the
others are considered false positives. When a ground
truth bounding box is left without any matching pre-
dicted detection, it counts as a false negative (FN).
If we note TP, FP and TN respectively the number
of True Positives, False Positives and False Negatives
in a dataset, we can define the following metrics:
Precision =
T P
T P + FP
, (2)
Recall =
T P
T P + FN
, (3)
F
1
=
Precision · Recall
Precision + Recall
. (4)
A high precision means that most of the predicted
boxes had a corresponding ground truth, i.e., the ob-
ject detector is not producing bad predictions. A high
recall means that most of the ground truth boxes had
a corresponding prediction, i.e., the object detector
finds most objects in the images. The F
1
-Score is
the harmonic mean of the precision and recall, it is
needed when a balance between precision and recall
is sought.
In the case of object detection on production lines,
a low precision means that sometimes a part might be
absent and the model would not see it, whereas a low
recall means that sometimes the part is present and the
model raises an alert anyways. For this reason, both a
good recall and a precision are required and the choice
of using the F
1
-Score metric seems appropriate.
Average Precision. After an OD model has been
trained, the computation of Precision, Recall and F1-
score depends on the value of the two thresholds de-
fined above (for the confidence score and IoU). In
order to properly choose the values of these thresh-
olds, it is interesting to analyze the Precision x Re-
call curves. For each class, and for a given value of
the IoU threshold, the confidence threshold is set as a
variable and sampled between 0 and 1 to plot a para-
metric curve with precision and recall as the x and
y-axis.
A class-specific object detector is considered good
if the precision remains high as the recall increases,
meaning that if you vary the confidence limit, the pre-
cision and recall will still be high. Hence, to com-
pare between curves we generally rely on a numerical
metric called Average Precision (AP). Since 2010, the
A Novel Method for Object Detection using Deep Learning and CAD Models
79
standard computation method for AP consists in cal-
culating the area under the curve (AUC) of the Preci-
sion x Recall curve (Everingham et al., 2010).
4 EXPERIMENTS AND RESULTS
The results obtained for the parameter selection pro-
cedure as well as our final evaluations are presented
here. These experiments were conducted on a Nvidia
Quadro P5000 GPU and a 2.90GHz Intel Xeon E3-
154M v5 processor (16 GB of RAM).
4.1 Hyperparameter Tuning
The parameter selection procedure is conducted ex-
clusively on the Yamaha logo object, the best set of
parameters is then tested on the Adblue object to en-
sure that it also performs well. The influence of four
tunable parameters on the final results is studied here.
for each parameter, three values were selected for the
tests. These parameters and their studied values are:
• Resolution: 640x480, 960x540, 1080x720
• Camera poses: 2, 5, 20
• Number of scenes: 20, 50, 200
• Number of distractors: 0, 5, 20
From simple preliminary experiments that are not pre-
sented here, we concluded that the number of tex-
tures used for the floor, the distractors and the sup-
port should be set to the maximum number of textures
available (in our case 7 for the floor and 6 for the two
others). The parameter values used in this work were
chosen empirically, that is, after several test scenar-
ios, these values were the ones that generated the best
performance regarding the metrics.
In total, from the values selected for the four pa-
rameters, we sampled more than 30 combinations and
compared the OD results on the testing set of real im-
ages. For each combination tested, we trained the
Faster-RCNN CNN on the synthetic images that were
generated. We note that, for each hyperparameters
combination, the experiments were repeated 10 times
in order to attenuate the influence of the random com-
ponents in the generation and training process. For
reasons of space in this article, it was not possible to
present all results. However, in order to demonstrate
the importance of this parameter selection step, Ta-
ble 1 shows the best and the worst configuration that
were tested.
In Table 1, we can see that the distractors are an
essential element in our proposed pipeline for image
generation. Indeed, when removing them, we can see
Table 1: Best and worst hyperparameters configurations ob-
tained and their corresponding results.
Parameters Best Case Worst Case
Resolution 960x540 960x540
cam poses 5 5
n scenes 20 20
n images 100 100
n distractors 20 0
Generation Time 1257.30 749.92
n samples 10 10
Precision %: Avg (Std.Dev) 78.06 (15.41) 57.34 (16.27)
Recall %: Avg (Std.Dev) 96.223 (4.07) 90.71 (6.45)
F1-Score %: Avg (Std.Dev) 85.19 (10.57) 66.80 (11.49)
a drop of around 23% in F1-score, on average across
the 10 experiment samples. We also tried combina-
tions with few distractors, but the F1-score results
dropped significantly. This makes sense as the real
images evaluated had several distractors as well.
Another important point is that the resolution of
the images generated should be greater than the infer-
ence images. In all of our tests, this scenario always
produced the best results. It also makes sense as it is
easier to learn from a more detailed/complex model
and then evaluate in a less detailed/complex scenario.
Finally, we also tried to increase the number of
generated training images to see if this would lead
to an increase in performance. Surprisingly, we ac-
knowledged that the performance dropped for the
case with 20 distractors, 20 camera poses and 50
scenes (1000 images). This might mean that when
presented too many synthetic images, the model starts
overfitting to the biases involved by our generation
process, and it also indicates that we do not need a
large number of images to train our model. In ad-
dition to this performance drop, generating ten times
more images also makes the proposed pipeline almost
25 times slower (31037.16 seconds).
4.2 Results
In this section, we evaluate the results of the best com-
bination of parameters (Best Case from Table 1) in
more details. These results are presented in Table 2,
they correspond to using a confidence threshold of
0.9 and an IoU threshold of 0.5. From Table 2, we
can see that the best parameters identified using only
the Yamaha logo produce similar results when applied
to another object (Adblue). This suggests that the
proposed parameters for our method seem to be well
suited for different objects and thus could generalize
well to various industrial use cases without additional
parameter tuning.
ICEIS 2021 - 23rd International Conference on Enterprise Information Systems
80

Table 2: Results obtained with the best set of hyperparame-
ters.
Object Precision % Recall % F1-Score %
Adblue 85.11 80.00 81.93
Yamaha logo 78.06 96.22 85.19
4.3 Discussion
It is difficult to compare our results with other works
in the literature. Indeed, as far as we know, the ap-
proach presented in this work is the first proposal to
build a fully automated pipeline that takes as input
the CAD model of an object and outputs a trained
object detection model for this object without any
real image. For fair comparison we would need to
compare our work with other end-to-end systematic
approaches to build OD models from CAD models,
which is impossible as it does not exists. Else, we
hope that the results presented in this work can serve
as a good baseline for comparison of future works in
this research direction.
However, we give a rough comparison with other
relevant works to give an idea of how well our ap-
proach is performing. In (Mazzetto et al., 2019) the
detection of objects in an automobile production line
was implemented, using only real images of the ob-
jects. In this work, the estimated detection accuracy
was around 90 %, which is only about 5 to 10 % bet-
ter than the results obtained in our work using only
synthetic images. In (Jabbar et al., 2017), the au-
thors also train an OD model using synthetic images
generated with Blender and evaluate the results in
real images. However, this approach is not entirely
automated since the scenes are created manually by
Blender artists to ensure photo-realism. The object
used in this work for evaluation is a glass of wine
and the maximum AP obtained is 71.14 %. We can
see that our systematic approach seems to work better
than this approach, however, we cannot reproduce the
method on our objects, as we cannot create the scenes
manually in the same way that they would. The po-
tential better performance of our approach can be ex-
plained by the fact that the loss of photo-realism can
be compensated by the higher number of images in
our synthetic datasets. Indeed, with our fully auto-
mated approach, it is faster and requires no effort to
generate more data, unlike in (Jabbar et al., 2017).
5 CONCLUSIONS
This work presents a systematic approach to train ob-
ject detection models to address industrial scenarios,
using only a CAD model of the object of interest as
input. The method first generates realistic synthetic
images using a custom Blender script, and then trains
a faster-RCNN OD model using the TensorFlow OD
API. To understand and optimize the different param-
eters in the proposed pipeline, a systematic parame-
ter selection study is conducted using a Yamaha logo
CAD model for training and real images containing
the same object in context for evaluation. The se-
lected hyperparameters are then tested on an other
object, showing that they can generalize to different
scenarios.
Over the last decade, successful deep learning
methods have been developed to tackle the challeng-
ing problem of generic object detection. However,
when it comes to the problem of OD in an indus-
trial environment, the availability of good quality data
becomes a bottleneck. To address this issue we pro-
posed to use synthetic images for training, which is
challenging as it might not reflect the high variabil-
ity found in in real industrial environment (objects,
pieces and scenery, etc.). In addition, there is also a
difficulty in finding CAD models of specific indus-
trial objects so that they can be trained and other ap-
proaches can be tested and compared. Thus, as a con-
sequence of this work, a set of data was produced and
made publicly available for future research
5
.
Therefore, the main conclusion from this work is
that it is possible to train an object detection model on
a set of synthetic images generated from CAD mod-
els with excellent performance. In addition, it was
shown that a large set of images is not needed to ob-
tain a significant result. Our experiments indicate that
the proposed rendering process is sufficient to obtain
good performances and that the way of building and
rendering the scenes is crucial for the final result.
ACKNOWLEDGEMENTS
Our work has benefited from the AI Interdisciplinary
Institute ANITI. ANITI is funded by the French “In-
vesting for the Future – PIA3” program under the
Grant agreement n
◦
ANR-19-PI3A-0004.
REFERENCES
Ananth, S. (2019). Faster R-CNN for object detection, a
technical paper summary.
Ben-Himane, S., Hintestroisser, S., and Navab, N. (2010).
Computer vision CAD models. US Patent App.
12/682,199.
5
https://github.com/igorgbs/systematic approach cad
models
A Novel Method for Object Detection using Deep Learning and CAD Models
81

Blender Online Community (2018). Blender - a 3D mod-
elling and rendering package. Blender Foundation.
Cohen, J., Crispim-Junior, C., Grange-Faivre, C., and
Tougne, L. (2020). CAD-based learning for ego-
centric object detection in industrial context. In
15th International Conference on Computer Vision
Theory and Applications, volume 5, pages 644–651.
SCITEPRESS.
Drost, B., Ulrich, M., Bergmann, P., Hartinger, P., and Ste-
ger, C. (2017). Introducing MVTec ITODD-a dataset
for 3d object recognition in industry. In Proceedings
of the IEEE International Conference on Computer
Vision Workshops, pages 2200–2208.
Everingham, M., Van Gool, L., Williams, C. K., Winn,
J., and Zisserman, A. (2010). The pascal visual ob-
ject classes (VOC) challenge. International journal of
computer vision, 88(2):303–338.
Ge, C., Wang, J., Wang, J., Qi, Q., Sun, H., and Liao,
J. (2020). Towards automatic visual inspection: A
weakly supervised learning method for industrial ap-
plicable object detection. Computers in Industry,
121:103232.
Gu
´
erin, J., Gibaru, O., Nyiri, E., Thiery, S., and Palos,
J. (2018a). Automatic construction of real-world
datasets for 3D object localization using two cam-
eras. In IECON 2018-44th Annual Conference of
the IEEE Industrial Electronics Society, pages 3655–
3658. IEEE.
Gu
´
erin, J., Gibaru, O., Nyiri, E., Thieryl, S., and Boots,
B. (2018b). Semantically meaningful view selection.
In 2018 IEEE/RSJ International Conference on Intel-
ligent Robots and Systems (IROS), pages 1061–1066.
IEEE.
He, K., Zhang, X., Ren, S., and Sun, J. (2015). Spatial pyra-
mid pooling in deep convolutional networks for visual
recognition. IEEE transactions on pattern analysis
and machine intelligence, 37(9):1904–1916.
Hinterstoisser, S., Lepetit, V., Wohlhart, P., and Konolige,
K. (2018). On pre-trained image features and syn-
thetic images for deep learning. In Proceedings of the
European Conference on Computer Vision (ECCV).
Hirz, M., Rossbacher, P., and Gulanov
´
a, J. (2017). Future
trends in CAD–from the perspective of automotive
industry. Computer-aided design and applications,
14(6):734–741.
Huang, J., Rathod, V., Sun, C., Zhu, M., Korattikara, A.,
Fathi, A., Fischer, I., Wojna, Z., Song, Y., Guadar-
rama, S., et al. (2017). Speed/accuracy trade-offs for
modern convolutional object detectors. In Proceed-
ings of the IEEE conference on computer vision and
pattern recognition, pages 7310–7311.
Jabbar, A., Farrawell, L., Fountain, J., and Chalup, S. K.
(2017). Training deep neural networks for detecting
drinking glasses using synthetic images. In Interna-
tional Conference on Neural Information Processing,
pages 354–363. Springer.
Jana, A. P., Biswas, A., et al. (2018). YOLO based de-
tection and classification of objects in video records.
In 2018 3rd IEEE International Conference on Recent
Trends in Electronics, Information & Communication
Technology (RTEICT), pages 2448–2452. IEEE.
Kuznetsova, A., Rom, H., Alldrin, N., Uijlings, J., Krasin,
I., Pont-Tuset, J., Kamali, S., Popov, S., Malloci, M.,
Duerig, T., et al. (2018). The open images dataset
v4: Unified image classification, object detection, and
visual relationship detection at scale. arXiv preprint
arXiv:1811.00982.
Lin, T.-Y., Maire, M., Belongie, S., Hays, J., Perona, P., Ra-
manan, D., Doll
´
ar, P., and Zitnick, C. L. (2014). Mi-
crosoft COCO: Common objects in context. In Euro-
pean conference on computer vision, pages 740–755.
Springer.
Lindsay, A., Paterson, A., and Graham, I. (2018). Identi-
fying and quantifying inefficiencies within industrial
parametric CAD models. In Advances in Manufac-
turing Technology XXXII: Proceedings of the 16th In-
ternational Conference on Manufacturing Research,
volume 8, page 227. IOS Press.
Liu, L., Ouyang, W., Wang, X., Fieguth, P., Chen, J., Liu,
X., and Pietik
¨
ainen, M. (2020). Deep learning for
generic object detection: A survey. International jour-
nal of computer vision, 128(2):261–318.
Mazzetto, M., Southier, L. F., Teixeira, M., and Casanova,
D. (2019). Automatic classification of multiple ob-
jects in automotive assembly line. In 2019 24th
IEEE International Conference on Emerging Tech-
nologies and Factory Automation (ETFA), pages 363–
369. IEEE.
Peng, X., Sun, B., Ali, K., and Saenko, K. (2015). Learning
deep object detectors from 3D models. In Proceed-
ings of the IEEE International Conference on Com-
puter Vision, pages 1278–1286.
Prasad, D. K. (2012). Survey of the problem of object de-
tection in real images. International Journal of Image
Processing (IJIP), 6(6):441.
Rajpura, P. S., Bojinov, H., and Hegde, R. S. (2017). Ob-
ject detection using deep CNNs trained on synthetic
images. arXiv preprint arXiv:1706.06782.
Ren, S., He, K., Girshick, R., and Sun, J. (2015). Faster R-
CNN: Towards real-time object detection with region
proposal networks. In Advances in neural information
processing systems, pages 91–99.
Shirley, P. and Morley, R. K. (2003). Realistic ray tracing.
AK Peters/CRC Press.
Xiao, Y., Tian, Z., Yu, J., Zhang, Y., Liu, S., Du, S., and
Lan, X. (2020). A review of object detection based
on deep learning. Multimedia Tools and Applications,
pages 1–63.
Yang, J., Li, S., Wang, Z., and Yang, G. (2019). Real-time
tiny part defect detection system in manufacturing us-
ing deep learning. IEEE Access, 7:89278–89291.
Zhang, X., Yang, Y.-H., Han, Z., Wang, H., and Gao, C.
(2013). Object class detection: A survey. ACM Com-
puting Surveys (CSUR), 46(1):1–53.
Zhou, B., Lapedriza, A., Khosla, A., Oliva, A., and Tor-
ralba, A. (2017). Places: A 10 million image database
for scene recognition. IEEE transactions on pattern
analysis and machine intelligence, 40(6):1452–1464.
ICEIS 2021 - 23rd International Conference on Enterprise Information Systems
82
