
A Comparison of Lateral Intention Models for Interaction-aware Motion
Prediction at Highways
Vinicius Trentin
a
, Antonio Artu˜nedo
b
, Jorge Godoy
c
and Jorge Villagra
d
Centre for Automation and Robotics, Spanish National Research Council, Madrid, Spain
Keywords:
Interaction-aware, Motion Prediction, Lane Change.
Abstract:
To safely navigate in complex scenarios is crucial to know the predictions of the vehicles involved in the
scene. The future behavior of the traffic participants is dependent on their intentions, the road layout and the
interaction between them. In this work, a framework is presented to compute the motion predictions of the
surrounding vehicles considering all possible routes obtained from a given map. At each time step, with a
Dynamic Bayesian Network, the probability of being on a specific route and the intention to change lanes are
computed. Our framework, based on Markov chains, is generic and can handle various road layouts and any
number of vehicles. We apply the framework in a two-lane highway and evaluate the influence of different
lane-changing methods on the predictions of the vehicles present at the scene.
1 INTRODUCTION
Autonomous vehicles promise to bring many benefits
to society, such as low accident rates, safety, fuel sav-
ing, better life quality, reduce stress, among others. In
order to assure the safety aspect, the algorithms im-
plemented need to deal with a large number of pos-
sible scenarios, with a varying degree of complexity,
and be able to predict the movement of the other ve-
hicles present in the scene considering their mutual
interactions.
The behavior of traffic participants is full of uncer-
tainties in the real world. In order to improvethe driv-
ing quality, autonomous vehicles should evaluate the
threats, should take seriously the ones with high prob-
ability to happen and should not overreact to the ones
with low probability. Probabilistic intention and mo-
tion predictions are unavoidable to accomplish safe
and high-quality decision-making and motion plan-
ning for autonomous vehicles (Zhan et al., 2018).
In this paper, we propose an approach to com-
pute the motion prediction of the surrounding vehi-
cles in all their possible routes in a short-term hori-
zon. In comparison with a previous work for mo-
tion prediction of the same authors sketched in (Med-
a
https://orcid.org/0000-0001-5732-3263
b
https://orcid.org/0000-0003-2161-9876
c
https://orcid.org/0000-0002-3132-5348
d
https://orcid.org/0000-0002-3963-7952
ina Lee et al., 2019) and with other works found in
the literature, more accurate results are producedhere,
since this newapproach can accommodaterestrictions
caused by the interaction between vehicles. Since we
focus on the lateral interaction, three models for the
lateral intention are compared. For the motion pre-
diction, the approach used is compared with two base-
lines: a set-based motion prediction and a probabilis-
tic prediction considering constant velocity.
This paper is divided as follows: Section 2
presents a short review of some works similar to the
one presented in this article. Section 3 described the
proposed approach with the lateral models evaluated
being presented in Section 4. Section 5 shows some
experimental results and Section 6 concludes.
2 RELATED WORK
Since our work is composed of two main building
blocks, some of the related work to each part and on
the combination of both are presented below.
2.1 Interaction Awareness
Considering that the intention of the other driverscan-
not be measured directly, it is necessary to estimate it.
Klingelschmitt et al. (2016), present a framework
for assessing traffic scenes with interaction between
180
Trentin, V., Artuñedo, A., Godoy, J. and Villagra, J.
A Comparison of Lateral Intention Models for Interaction-aware Motion Prediction at Highways.
DOI: 10.5220/0010460701800191
In Proceedings of the 7th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2021), pages 180-191
ISBN: 978-989-758-513-5
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

traffic participants. They transform the possible be-
havior patterns of the vehicles involved into hypothe-
ses and compute the joint probability of each hy-
pothesis by reconstructing the individual probability
of each behavior. As a result, they obtain the fully
interaction-aware joint probability distribution over
all the hypotheses. Their approach grows exponen-
tially as the situation complexity and the number of
vehicles involved increase.
Lefevre et al. (2013) implement a Dynamic
Bayesian Network to reason about the situations and
the risks at intersections on a semantic level. The
risk is assessed based on the comparison of the in-
tentions with what is expected from the drivers at a
given scenario. They model the expected vehicle’s
motions based on the road network (stop signs, give
away lines), distance to the intersections and previous
pose and velocity. The intention to stop is computed
based on the previous intention and current expecta-
tion. With the intention and the maneuver, the fu-
ture pose and velocity can be estimated. An evolution
of this approach considering also lateral expectations
has been recently presented (Villagra et al., 2020).
Although these methods take into account the
interdependence between vehicles to find the most
probable route combination or if the situation offers
risk, they do not include the motion prediction of the
traffic participants, as all areas they can reach, which
is crucial when planning the ego vehicle trajectory.
2.2 Motion Prediction
Althoff and Magdici (2016) propose the use of set-
based predictions with reachability analysis to find all
possible reachable sets based on a given map and the
positions and velocities of the traffic participants. Al-
though this approach ensures a safe planning for the
ego vehicle, given that all vehicles follow the traffic
rules, it is too conservative and given a complex sce-
nario with many vehicles, the ego vehicle might have
to come to a full stop since all paths are occupied.
In another work, Althoff (2010) abstracted the
motion model into Markov chains using reachability
analysis. He considers the vehicle’s dynamics, their
mutual interactions (only based on the road geome-
try and traffic rules) and also the limitation of driving
maneuvers due to road geometry, resulting in crash
probabilities for the possible paths of the ego vehicle.
In Zechel et al. (2019), the authors present an ap-
proach to compute the motion predictions of the ve-
hicles, without prior knowledge of the scene, con-
sidering separately the lateral and longitudinal move-
ment. The longitudinal over-approximation is based
on intervals obtained from real data. The lateral over-
approximationis computedwith the use of acceptance
distributions where it evaluates all considered lateral
accelerations for one specific driver influence, such
a static or dynamic obstacle. They compare their ap-
proach with the occupancypredictions computed with
SPOT and the comparison showed that the occupancy
area size could be reduced up to 70% for a prediction
horizon up to 1.3 s without errors.
Although these methods can predict the motion of
the surrounding vehicles, they can have low accuracy
in complex situations involving many vehicles, such
as an intersection, due to their interdependent inten-
tions and resulting actions.
2.3 Motion Prediction with Interaction
Awareness
As already mentioned, in order to have a better esti-
mation of the future positions of the vehicles involved
in the scene, the motion prediction and the interaction
awareness should be jointly considered.
Schulz et al. (2018) use a Dynamic Bayesian Net-
work with a particle filter to evaluate the interaction
between vehicles and estimate their route and maneu-
ver intentions. From these intentions, an action, rep-
resented by an acceleration and yaw rate values, is
obtained and the motion prediction is computed. This
method considers only the most probable action for
the whole time horizon of the prediction, which, in
complex scenarios, may negatively influence the mo-
tion planning search space.
In Koschi and Althoff (2017a), the authors ex-
pand their work from Althoff and Magdici (2016) to
include the interaction between drivers in their set-
based predictions. They do it by comparing vehicles
driving on the same lane and removing the unreach-
able areas of the following vehicles. As a result, the
drivable area of the ego vehicle increases, since some
previews occupied areas are removed. This approach,
however, considers neither intentions nor traffic rules
in the predictions.
3 FRAMEWORK FOR
INTERACTION-AWARE
MOTION PREDICTION
In Figure 1 the flowchart of the work is presented.
Each of the building blocks appearing in the figure
will be briefly described in the following sections.
A Comparison of Lateral Intention Models for Interaction-aware Motion Prediction at Highways
181
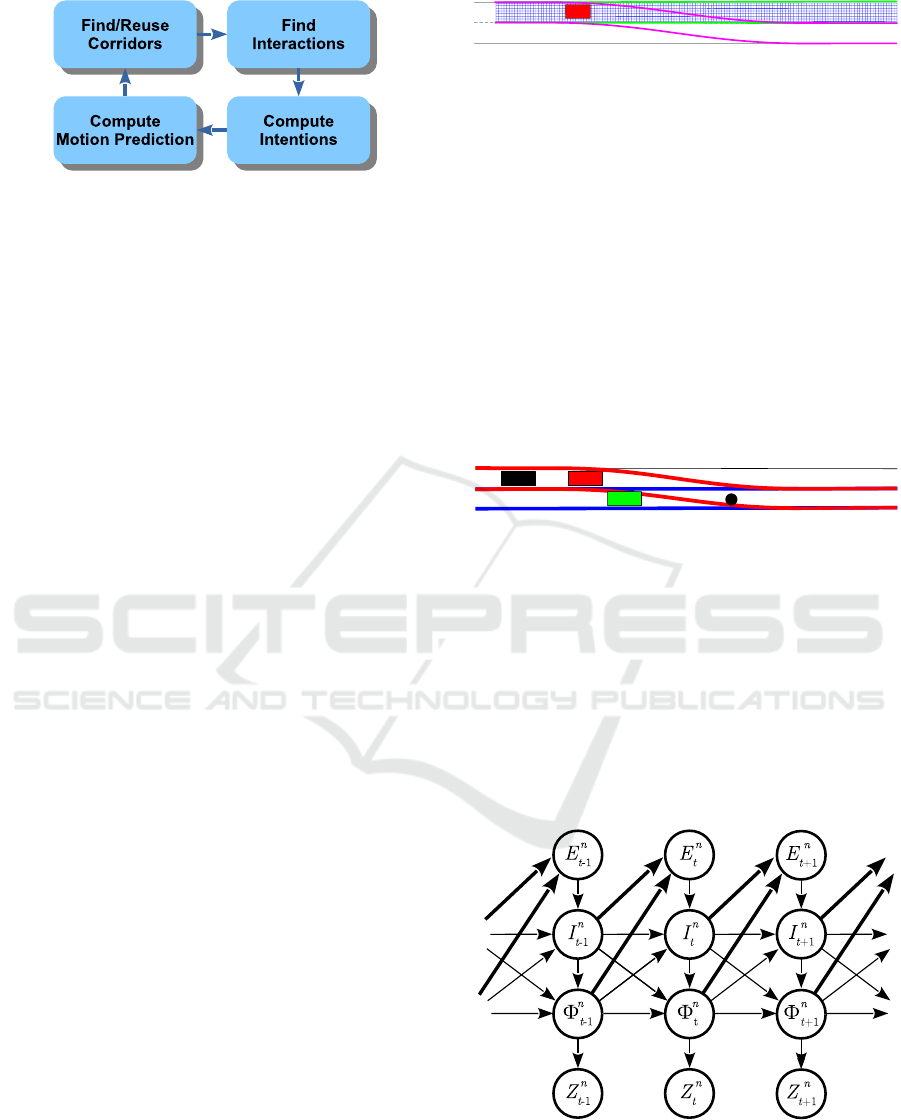
Figure 1: Flowchart.
3.1 Find/Reuse Corridors
Given a map formed by lanelets (Bender et al., 2014),
their relational and physical layers are used in order
to obtain all the navigable corridors for the vehicles in
the scene. The length of these corridors has, at min-
imum, the distance that the car can reach in a time
interval with its current speed, assuming a constant
maximum acceleration.
First, we obtain the current lanelet(s) where the
vehicle is located, comparing the position and the ori-
entation in the physical layer. Next, a graph search is
performed for surrounding lanelets starting from the
vehicle lanelet(s) to create a lanelet-sequence for each
corridor.
In the next iterations, the corridors found can be
either expended or removed, if necessary. The ex-
pansion occurs if its predicted occupancy probabili-
ties fall in cells that are farther then a percentage of
the grid length (85% in our case). The removal occurs
if the current measured orientation of the vehicle has
a difference bigger than a threshold when compared
with the center line of the corridor.
At each iteration, the lanelet in which the center
of the vehicle is located is found. Based on this in-
formation, each corridor is defined as being left, cen-
ter, right or not reachable with respect to the position
of the vehicle. To reach the corridors at right/left, a
B´ezier curve is created that concatenates the two road
segments (the one in the current lane with the one in
the adjacent lane) with a length of max(4v, 10)m, be-
ing v the current vehicle’s velocity and 4 is the con-
sidered duration of a lane change (in seconds). These
values were defined after analyzing the patterns of a
lane change.
The detection of a lane change is based on the po-
sition of the vehicle and occurs in one iteration: at
instant t the vehicle is in lanelet x and at instant t + 1
the vehicle is in lanelet y.
With the exception of the ego vehicle, for each
corridor of the other vehicles, a grid is created based
on the shape of the road. For the ego vehicle, a route is
assumed. An example of the corridors of a vehicle is
shown in the Figure 2, where for one of the corridors
the grid is drawn.
Figure 2: Example of corridors and grid.
3.2 Find Interactions
A search of surrounding vehicles is performed for all
the vehicles in the scene, generating a table that con-
tains the distances and velocities.
In order to restrict the motion probabilities in cor-
ridors that have another vehicle or that can collide
with the corridors of other vehicles, the collision point
between these corridors is obtained as can be seen in
Figure 3. They result from the intersection between
the corridors’ center lines, where the chosen point is
the first where the distance is less than a given thresh-
old. So far, these types of collisions are not being con-
sidered when both vehicles are changing lanes, being
this a future work.
Figure 3: Example of collision between corridors.
3.3 Compute Intentions
In order to compute the intention of the traffic partic-
ipants, the Dynamic Bayesian Network (DBN) pro-
posed by Villagra et al. (2020) is inferred using a par-
ticle filter. For each of the vehicles present in the
scene, with the exception of the ego vehicle, the net-
work represented in Figure 4 is instantiated, where
bold arrows represent the influences of the other vehi-
cles on vehicle n.
Figure 4: Bayesian network.
The relations among variables appearing in Figure
4 allows to model the driving scene as the following
generalized distribution (Lefevre et al., 2013):
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
182

P(E
0:T
,I
0:T
,Φ
0:T
,Z
0:T
) = P(E
0
,I
0
,Φ
0
,Z
0
)×
T
∏
t=1
×
N
∏
n=1
[P(E
n
t
|I
t−1
Φ
t−1
) ×P(I
n
t
|Φ
n
t−1
I
n
t−1
E
n
t
)×
P(Φ
n
t
|Φ
n
t−1
I
n
t−1
I
n
t
) ×P(Z
n
t
|Φ
n
t
)]
(1)
where the variables are described below:
• Expected maneuver E
n
t
: represents the expected
lateral behavior of the vehicle n at instant t ac-
cording to traffic rules. It models the probability
that the vehicle can make a lane change without
hindering traffic. It can assume two values: stay
and change.
• Intended maneuver I
n
t
: represents the intention of
the vehicle and includes the route the vehicle in-
tends to follow.
• Physical vehicle state Φ
n
t
: represents the pose and
speed of the vehicle. They are calculated at each
instant based on the intentions.
• Measurements Z
n
t
: represents the real measure-
ments of the physical state of the vehicle, ex-
tracted directly from exteroceptive sensors of the
ego-vehicle or via V2X communications.
3.3.1 Lateral Expectation
The decision to change lanes should be based on the
desire to quit the current lane, the selection of the
target lane and the feasibility of the change.
Lane changes are usually classified as mandatory
or discretionary, depending on the drivers motivation.
A Mandatory Lane Change (MLC) is performed
when the driver is trying to move his/her vehicle from
its current lane into the target lane in anticipation
to a left or right exit or a lane closure immediately
downstream. A Discretionary Lane Change (DLC)
is conducted to improve driving conditions when
the driver desires a faster speed, greater following
distance, etc. in the target lane Vechione et al. (2018);
Toledo et al. (2003).
When implementing the aforementioned particle
filter, for every vehicle in every particle the vehicles
followers and leaders in all possible lanes are deter-
mined and the distances bumper-to-bumper and the
velocity differences are found. This information is
used to compute the expected lateral motion of the
vehicles present at the scene, for which three models
were selected, implemented and compared (see
Section 4 for more details). Two of these models use
only DLC and the third one uses a hybrid approach
between MLC and DLC.
3.3.2 Lateral Intention
The lateral intention is computed based on the previ-
ous intentions (I
t−1
) and the current expectation(E
t
).
The intention will be considered equal to 1 (change
lane) if a random value is smaller then the probability
generated by Table 1.
Table 1: Lateral Intention.
I
t−1
E
t
Probability
0 0 0.1
0
1 0.5
1 0 0.5
1
1 0.9
In this step it is also defined the new corridor of
each vehicle in each particle. If the intention is to
change, one of the corridors in the target lane defined
in the previous step is selected.
3.4 Compute Predictions
To compute the probabilistic predictions of the vehi-
cles present at the scenarios, the library CORA (Al-
thoff, 2015) has been used following the strategy pro-
posed in Althoff (2010). The predictions are com-
puted by abstractions of the system dynamics into
Markov chains, where the state space X and input
space U are discretized into intervals. The former
representing the longitudinal position s and velocity
v, each interval with size 0.5 m x 1 m/s, respectively,
and the latter representing the acceleration a normal-
ized into [-1, 1].
The longitudinal vehicle’s dynamics are expressed
using the following differential equation:
˙s = v
˙v =
a
max
u, 0 < v < v
sw
∪u ≤0
a
max
v
sw
v
u, v > v
sw
∩u > 0
0, v ≤ 0
(2)
where a
max
is the maximum acceleration allowed, v
sw
is a switching velocity that changes the acceleration
dynamics, and u is the input ranging from −1 to 1.
For the lateral dynamics, it is assumed that the ve-
hicle can occupy the entire lane width with a constant
standard deviation.
The transition probability matrices of the Markov
chains for a time step Φ(τ), and for a time interval
Φ([0,τ]), where τ is the time increment, are computed
offline with reachability analysis that aims to compute
an over-approximation of the set of states a system
can reach given its initial states, inputs and parame-
ters. For each state of the state space and for each
A Comparison of Lateral Intention Models for Interaction-aware Motion Prediction at Highways
183

input of the input space, the motion model is applied
for a time interval τ resulting in a set covering one
or more cells from the state space. The probability
of reaching the cell j, starting from cell i under the
influence of input β is computed as follows:
Φ
β
ji
(τ) =
V(R
β
i
(τ) ∩X
j
)
V(R
β
i
(τ))
(3)
where the operatorV returns the volume of the set and
R
β
i
(τ) is the reachable set starting from cell i applying
input β. The transition probabilities between the input
states are represented by the input transition matrix
Γ(t
k
). This matrix is composed by two parts: a tran-
sition matrix Ψ, which models the intrinsic behavior
of the vehicle when there are no priorities for certain
input values, and a priority vector λ, representing the
restrictions caused by the road layout, the interaction
with other vehicles or a combination of both. A de-
tailed explanation of these variables can be found in
Althoff (2010). These parts are joined as follows
Γ
βδ
i
= norm(
ˆ
Γ
βδ
i
)
ˆ
Γ
βδ
i
= λ
β
i
Ψ
βδ
,∀i :
∑
β
λ
β
i
= 1,0 ≤λ
β
i
≤ 1 (4)
to form the transition matrix where i is the index of
a state space and β and δ are indices of two possible
input states. The reason this matrix is not joined into
the transition matrix Φ(τ), is that the priority vector λ
can change at each step.
The probabilities distribution for future time steps
p(t
k+1
) and time intervals p(t
k
,t
k+1
) are computed as
follows:
p(t
k+1
) = Γ(t
k
)Φ(τ)p(t
k
)
p(t
k
,t
k+1
) = Φ([0,τ])p(t
k
)
(5)
For each corridor from each vehicle a Markov
chain is instantiated and the predictions are computed
for a time interval. These predictions are multiplied
with the sum of the weights of the particles that con-
tains the corridors and they are later joined into a sin-
gle grid based on the ego-vehicle position, whose size
is based on the ego-vehicle’svelocity and the situation
context.
4 LATERAL MODELS
The models implemented and compared are presented
below. These models were selected based on their
simplicity and low computational cost.
4.1 Model 1
The first model implemented is based on Mathew
(2019). The desire to change lane is computed by
the deceleration a provoked by the leading vehicles
(when they exist) traveling in front of each vehicle in
the current and adjacent lanes:
a =
ρv
m
∆v
∆x
l
(6)
where v is the velocity of the vehicle, ∆v is the dif-
ference between the velocities of the vehicle and the
one of the leading vehicle, ∆x is the distance between
vehicles and ρ, m and l are parameter models. With
the acceleration values a
i
in each of possible lanes,
the utility U
i
of each lane i is defined as:
U
i
=
e
a
i
∑
N
j=1
e
a
j
(7)
where a
i
is the acceleration with respect to the leading
vehicle of lane i and N is number of possible target
lanes.
If the leading vehicle in the current lane is making
the target vehicle brake, the lane with the highest util-
ity is selected, otherwise, a random lane, among the
possible lanes, is selected.
Once the lane is selected, it is necessary to ver-
ify that the deceleration imposed to the new follower,
computed with (6), is below a given threshold b, such
that a > −b.
If the safety criteria is met, the probability to ac-
cept the gap is computed as:
P(lead) = 1 −e
−λ(t
lead
−τ)
P(lag) = 1−e
−λ(t
lag
−τ)
(8)
where t
lead
and t
lag
are the time gaps with respect to
the leading and following vehicle in the target lane.
The probability to change lane is the result of
the multiplication of P(lead) and P(lag) and the ex-
pected lateral movement will be 1 if this probability
is bigger than a random value.
4.2 Model 2
The second model implemented is the Minimizing
Overall Braking Induced by Lane Changes (MOBIL)
(Kesting et al., 2007), used in combination with the
Intelligent Driver Model (IDM) (Treiber et al., 2000).
As in the previous model, this one also includes
a safety criteria: the deceleration of the new follower
a
nf
in the target lane, after the lane change, cannot
exceed a given safety limit b
saf e
a
nf
> −b
saf e
(9)
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
184

The authors of MOBIL propose two types of in-
centive criterion for lane changing: one considering
symmetric passing rules and an asymmetric one. The
one adopted in this work is the asymmetric model,
where the right most lane is the default lane and the
lanes on the left should only be used for overtaking
purposes.
The incentive criterion for a lane change to a left
(L) lane and to a right (R) lane are:
L = ˜a
c
−a
c
+ p( ˜a
n
−a
n
) > ∆a
th
+ ∆a
bias
R = ˜a
c
−a
c
+ p( ˜a
o
−a
o
) > ∆a
th
−∆a
bias
(10)
where ˜a
c
, a
c
, ˜a
o
, a
o
, ˜a
n
and a
n
are the accelerations
of the target vehicle, old follower and new follower
after and before the lane change, p is the politeness
factor, ∆a
th
and ∆a
bias
are the acceleration threshold
and bias, respectively. It can be noticed that the lane
change to a right lane considers only the advantages
to the old follower. A lane change to a left lane, on the
other hand, takes into account the effects caused to the
new follower. The politeness factor p determines how
much the others vehicles influence the lane-changing
decision of the target vehicle.
The IDM acceleration of each vehicle α depends
on the distance s
α
and on the velocity difference ∆v
α
to the leading vehicle. It is composed of two parts:
the acceleration a[1−(v
α
/v
o
)
4
] on a free road and the
braking −a(s
∗
/s
α
)
2
caused by a leading vehicle.
˙v
α
= a
"
1−
v
α
v
o
4
−
s
∗
(v
α
,∆v
α
)
s
α
2
#
s
∗
(v,∆v) = s
o
+ vT +
v∆v
2
√
ab
(11)
where a is the maximum acceleration, b is the desired
comfortable deceleration, s
o
is the minimum distance,
v
o
is the desired velocity and T is the safe time gap.
4.3 Model 3
The third model implemented is based on Toledo et al.
(2005). The authors argue that the classification of the
lane changes into MLC or DLC does not allow the
capture of trade-offs between the two types. For this
reason, they created a method that includes both types
in a single model.
This model penalizes the most right lane, since it
considers this lane as being of low speed, caused by
the entrances and exits.
At the highest level of the model, the driver
chooses a target lane. It is the lane, among all the
possible lanes, the driver recognizes as the best lane
to be in after considering a wide range of factors and
goals. The utilities of the various lanes are given by:
U
TL
int
= β
i
−0.011D
int
+ 0.119S
int
+ 0.022∆X
front
int
δ
ad j
int
+0.115∆S
front
int
δ
int
−2.783δ
taigate
nt
δ
CL
int
+δ
CL
int
−2.633∆CL
int
+ β
path
i
[d
exit
nt
]
−0.371
−0.980δ
next exit
nt
∆Exit
i
−α
i
ν
n
(12)
where U
TL
int
is the utility of lane i as a target lane to the
driver n at time t, βi is the lane i constant, D
int
and S
int
are the lane-specific densities and speeds, ∆X
front
int
and
∆S
front
int
are the spacing and relative speed of the front
vehicle in lane i. δ
ad j
int
, δ
CL
int
and δ
tailgate
nt
are indicators
with value 1 if i is the current or an adjacent lane,
if i is the current lane, if vehicle n is being tailgated
at time t, respectively, lane, 0 otherwise. ∆CL
int
is
the number of lane changes required to get to lane i
from the current lane. β
path
i
is the path plan impact
coefficient for lane i, δ
next exit
nt
is the distance to the
exit driver n intends to use. δ
next exit
nt
indicates with 1
if the driverintends to take the next exit, ∆Exit
i
are the
number of lane changes required to get to the exit lane
from lane i. α
i
is the parameter of the driver specific
random term ν
n
.
The target lane is chosen as the lane with the high-
est utility. The probabilities are given by a multino-
mial logit model:
P(TL
nt
= i|ν
n
) =
exp(V
TL
int
)|ν
n
)
∑
j=TL
exp(V
TL
jnt
|ν
n
)
(13)
Once the utilities are computed one has to eval-
uate the lead and lag gaps, which are defined by the
bumper-to-bumperdistance between the lead and sub-
ject vehicle and the bumper-to-bumper distance be-
tween the lag distance and the subject vehicle.
The gap is acceptable if it is bigger than the critical
gap:
P(G
gd
nt
> G
gd,cr
nt
|d
nt
,ν
n
) = Φ
"
ln(G
gd
nt
) −G
gd,cr
nt
σ
g
#
(14)
where Φ[] denotes the cumulative standard normal
distribution, G
gd
nt
and G
gd,cr
nt
are the gap and the criti-
cal gap for vehicle n at time t, referring superscript d
to the direction of change (current, left or right) and g
to the type of gap (lead or lag).
The critical lead and lag gaps are given by:
G
lead d,cr
nt
= exp(1.553 −6.389max(0,∆S
lead d
nt
)
−0.14min(0,∆S
lead d
nt
−0.008ν
n
)
G
lag d,cr
nt
= exp(1.429 + 0.471max(0,∆S
lagd
nt
)
−0.234ν
n
)
(15)
A Comparison of Lateral Intention Models for Interaction-aware Motion Prediction at Highways
185

∆S
lead d
nt
and ∆S
lead d
nt
are the relative speeds of the lead
and lag vehicles in the direction of change d.
The probability to accept the gap is the result of
the multiplication of the acceptance of the lead and
lag gap and the expected lateral movement will be
to change if this probability is bigger than a random
value.
5 EXPERIMENTAL RESULTS
5.1 Scenario
We evaluate the framework proposed in the previous
section in a scenario simulated with SCANeR Stu-
dio simulator (AVSimulation, 2019). It is a two-lane
highway with the ego vehicle (black) and 4 other ve-
hicles (magenta, red, green and yellow), where 4 lane
changes are executed. The information about the sur-
rounding vehicles is received by the ego vehicle as a
vector of high-levelobjects containing their estimated
pose, velocity, and size. Figure 5 shows the initial po-
sition and the path followed by each vehicle and Fig-
ure 6 shows the velocities of each vehicle throughout
the simulation.
5.2 Execution of the Lateral Models
The simulation is executed three times, one for each
lateral model. Figure 7 shows the graphs of expecta-
tion and intention for each vehicle with the three mod-
els in the simulated scenario, where it can be noticed
the specificities of each model. In the expectation of
the green vehicle (Figure 7b), once it overtakes the
yellow vehicle, the expectation to change lanes from
Model 1 stays around 0.5, since no deceleration is
caused, meaning both lanes are possible and feasible.
For Model 2, the right most lane has always the prior-
ity, which can be seen as the expectation stays around
1 when the vehicle is on the left lane and the right lane
is available. For Model 3, in the same situation, the
expectation is to stay on the current (left) lane, since
it penalizes the right most lane and also penalizes lane
changes. The penalization to change lanes can be seen
in the expectation of the yellow vehicle (Figure 7c)
that stays the whole simulation on the right lane and
the expectation stays around 0. Since this vehicle is
already on the right lane, the expectation for Model 2
stays around 0 and for Model 1 stays around 0.5 when
both lanes are feasible.
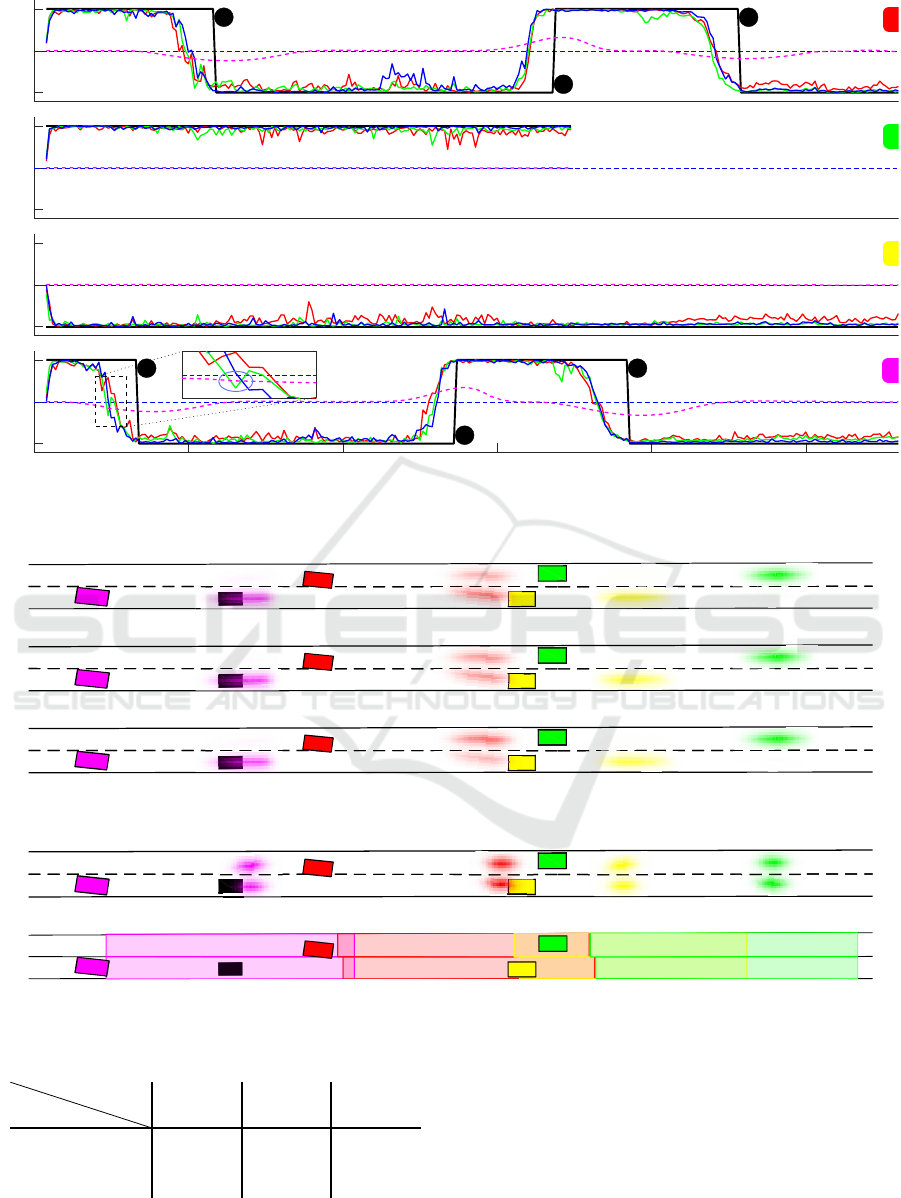
Figure 8 shows the evolution of the probabilities
for each vehicle and each model. These probabilities
are computed as 1 − p
right
, where p
right
is the prob-
ability of being on the right most corridor. As men-
tioned before, the probability of each corridor is the
sum of the weights of the particles that contains this
corridor. Each line, marked with the color of the ve-
hicle on the top right corner, represents the evolution
of this vehicle. The x axis is the time and the y axis
is the probability of being on each lane, being 0 the
right (bottom) lane and 1 the left (top) lane. The line
in black is the ground truth, the lane in which the ve-
hicle is at, at each instant. The three models are repre-
sented by the lines in red, green and blue, respectively.
The magenta dashed line is the orientation of the vehi-
cle withe respect to the orientation of the lane and the
numbers mark the lane changes whose leading times
for each model are presented in Table 2. The dashed
line in blue is the threshold for the detection of a lane
change.
Table 2: Leading time.
Lane
Change
Model
1 2 3
1 1.0 s 0.9 s 0.7 s
2 0.8 s 0.8 s 0.9 s
3
0.8 s 0.9 s 0.8 s
4 0.7 s 0.8 s 0.9 s
5
0.9 s 0.7 s 0.6 s
6 1.2 s 1.0 s 1.0 s
5.3 Predictions and Evaluation
Figure 9 shows an example of the predictions com-
puted with the model from Section 3.4 in the last time
interval (2.9 - 3.0 s) for all three models. The time
when these predictions were made was chosen at 4.6
s, to show an instant where interactions become more
intense.
The differences of the models in these figures are
more visible in the lane change of the red vehicle. In
this particular frame, the intention from the red vehi-
cle to change lanes is more visible in Model 1 than in
Model 3, which confirms the differences in the lead-
ing time for this lane change (1) in Table 2.
The advantages of the proposed DBN are high-
lighted when compared with the baselines predictions
computed with constant velocity and with the avail-
able version of the library SPOT (Koschi and Althoff,
2017b), which produces set-based reachable sets. For
the model with constant velocity, the prediction mean
and variance used are obtained as follows:
p(k) = N (µ
k
, σ
2
k
)
µ
k
= x
o
+ v∗k∗dt
σ
2
k
= k∗dt
(16)
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
186
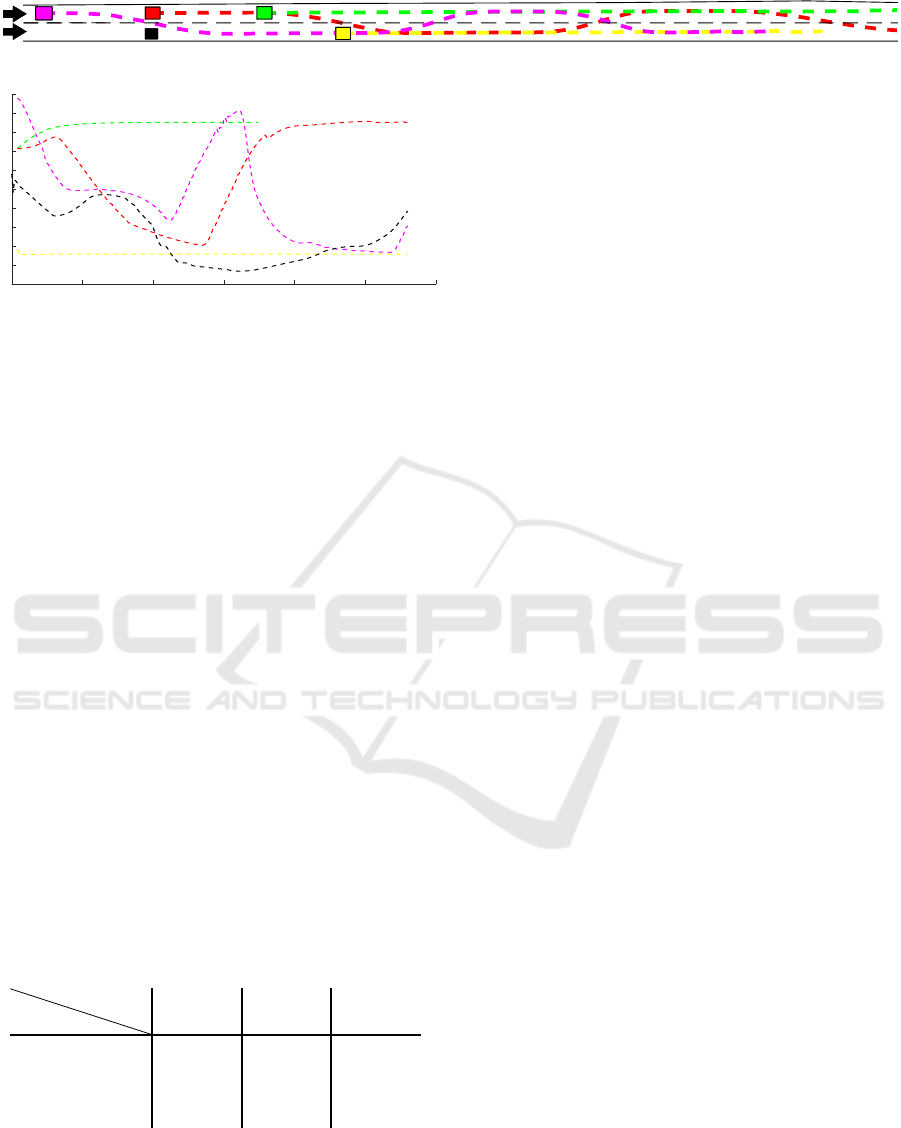
Figure 5: Paths evolution of each vehicle in the simulated scenario.
0 5 10 15 20 25 30
Time (s)
4
5
6
7
8
9
10
11
12
13
14
Velocity (m/s)
Figure 6: Velocities throughout the execution of the simu-
lation.
The predictions in the time interval 2.9 - 3.0 s
for the same time in the simulation for both baseline
methods are shown in Figure 10. In the method with
constant velocity, both corridors are equally probable
and the acceleration history and lane shape are irrel-
evant: the size of the distribution is the same for all
vehicles at every step. The results from SPOT, on the
other hand, do include the acceleration’s limits and
take into account the shape of the road (for the cor-
ridors changing lane), but they are too conservative,
leaving almost no free space for the motion planning
of the ego vehicle.
Figure 11 shows the correlation of the prediction
and the actual vehicle pose at the time interval (1.4 -
1.5 s) for all three models. It also includes a numeri-
cal evaluation of the prediction at the considered time.
The metric used consists in getting the likelihood of
the cell the center of the vehicle is located at from a
prediction made 1.5 s before. It is one of the criteria
used to assess the lateral models behaviour that are
compared. Since the red vehicles is the one with the
most different values among the models, its evalua-
tion is shown in a zoomed in box on the right of each
figure. Table 3 presents the sum of the evaluations for
each vehicle for each model for the whole simulation.
Table 3: Evaluation of the predictions per model.
Vehicle
Model
1 2 3
Red 0.34718 0.34871 0.34644
Green
0.22011 0.22223 0.22637
Yellow 0.51265 0.52836 0.52215
Magenta
0.33666 0.34174 0.34041
The vehicles with the more accurate predictions
are vehicles that do not change lanes, the green and
the yellow (the green vehicle leaves the simulation
10.5 seconds before its end). Besides the early detec-
tion of the lane change, it is also due to the fact that
the lane changing corridors do not perfectly match the
movement executed by the vehicles. Other factor that
influences the precision of the prediction is the lateral
position of the vehicle within the lane. So far, the lat-
eral distribution is the same for every vehicle, being
the mean the center of the lane. The use of an adap-
tive distribution, considering the lateral displacement
of the vehicle is part of a future work.
5.4 Evaluation Metrics
To evaluate the quality of the results, three metrics
were defined: the lead time of the detection l, the
probability p of being on the current position based
on the predictions of a previous time, and the false
lane change detection f.
• The lead time l is defined as the time where the
corridor that is changing lanes has the biggest pri-
ority and maintains the dominance until the lane
change is detected.
• The probability p is sum of the evaluation’s prob-
abilities for the whole simulation.
• The false detection f is the sum of intervals where
the probability is bigger on a corridor that is not
the correct one or a noise in the lane change. The
intervals between the lead time and the detection
of a lane change are not included. One example
of a false detection is marked in Figure 8.
Each metric is computed as follows:
l
k
=
N
∑
v=1
Nc
v
∑
c=1
l
c
k
v
, p
k
=
M
∑
i=1
N
∑
v=1
p
i
k
v
, f
k
=
M
∑
i=1
N
∑
v=1
f
i
k
v
where l
c
k
v
is the leading time of the lane change c of
the vehicle v for the model k, p
i
k
v
is the accuracy of
a previous prediction at time interval i for the vehicle
v for the model k, f
i
k
v
is the false detection for the
vehicle v at the time interval i for the model k, N is the
number of vehicles, Nc
v
is the number of lane changes
for the vehicle v and M is the number of simulated
intervals.
Table 4 presents the values of each metric for the
three models. For this scenario, model 1 yield better
leading times, although the predictions from model 2
and 3 are slightly more accurate. The reason for this is
mostly due to the fact that the lane changing corridors
do not perfectly match the movement executed by the
vehicles. The number of false detection are the same
A Comparison of Lateral Intention Models for Interaction-aware Motion Prediction at Highways
187

0 5 10 15 20 25
0
0.2
0.4
0.6
0.8
1
Probability
Expectation
MODEL 1
MODEL 2
MODEL 3
0 5 10 15 20 25
0
0.2
0.4
0.6
0.8
1
Probability
Intention
MODEL 1
MODEL 2
MODEL 3
(a) Red Vehicle
0 5 10 15 20 25
0
0.2
0.4
0.6
0.8
1
Probability
Expectation
MODEL 1
MODEL 2
MODEL 3
0 5 10 15 20 25
0
0.2
0.4
0.6
0.8
1
Probability
Intention
MODEL 1
MODEL 2
MODEL 3
(b) Green Vehicle
0 5 10 15 20 25
0
0.2
0.4
0.6
0.8
1
Probability
Expectation
MODEL 1
MODEL 2
MODEL 3
0 5 10 15 20 25
0
0.2
0.4
0.6
0.8
1
Probability
Intention
MODEL 1
MODEL 2
MODEL 3
(c) Yellow Vehicle
0 5 10 15 20 25
0
0.2
0.4
0.6
0.8
1
Probability
Expectation
MODEL 1
MODEL 2
MODEL 3
0 5 10 15 20 25
0
0.2
0.4
0.6
0.8
1
Probability
Intention
MODEL 1
MODEL 2
MODEL 3
(d) Magenta Vehicle
Figure 7: Expectation and intention for each vehicle.
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
188
0
0.5
1
1
2
3
0
0.5
1
0
0.5
1
0 5 10 15 20 25
0
0.5
1
4
5
6
7
Time (s)
Probability
False detection
Figure 8: Evolution of each vehicle in the simulation: the line in black is the ground truth; the lines in red, green and blue
represent the evolution of the Model 1, 2, and 3, respectively; the blue line is the threshold to identify the lane change; the
line in magenta is the orientation of the vehicle with respect to the center line of the lane.
(a) Model 1
(b) Model 2
(c) Model 3
Figure 9: Predictions at the interval 2.9 - 3.0 s for each of the models.
(a) Constant velocity
(b) SPOT
Figure 10: Baseline predictions at the interval 2.9 - 3.0 s.
Table 4: Metrics of each model.
Parameter
Model
1 2 3
l 5.4 s 5.1 s 4.9 s
p
1.41660 1.44103 1.43536
f 1 1 1
for the three models.
A video with the evolution of the three simulations
is available in https://youtu.be/HxXE8bc8-5Y.
We evaluate the three models in another scenario
with 3 lanes and 5 vehicles where a higher number of
false detection is present. The paths followed by each
vehicle and their velocities are shown in Figures 12
and 13, respectively. Due to a lack of space, only the
A Comparison of Lateral Intention Models for Interaction-aware Motion Prediction at Highways
189

(a) Model 1 - Red : 0.000328 Green : 0.001216 Yellow : 0.001815 Magenta : 0.001189
(b) Model 2 - Red : 0.000260 Green : 0.001227 Yellow : 0.001848 Magenta : 0.001207
(c) Model 3 - Red : 0.000174 Green : 0.001227 Yellow : 0.001845 Magenta : 0.001191
Figure 11: Evaluation of the predictions.
Figure 12: Paths evolution of each vehicle in the second simulated scenario.
result table (Table 5) will be presented.
0 5 10 15 20 25 30
Time (s)
0
2
4
6
8
10
12
Figure 13: Velocities throughout the execution of the sec-
ond simulation.
Table 5: Metrics of each model for the second scenario.
Parameter
Model
1 2 3
l 7.6 s 7.1 s 7.8 s
p 0.9488 0.96688 0.95825
f
71 87 52
In this case, model 3 yield better leading time and
the lowest number of false detection. The predictions
from model 2 are better but its number of false detec-
tion is the highest among the three models.
To combine both experiments, the values of l is
normalized by the number of lane changes and the
values of p and f are normalized by the number of
simulated intervals each vehicle is present and the
number of vehicles. Table 6 presents the sum of
the normalized results of both simulations for each
model.
Table 6: Normalized sum of the results.
Parameter
Model
1 2 3
l
norm
1.9857 1.8643 1.9309
p
norm
0.002150 0.002187 0.0021789
f
norm
0.0609 0.0732 0.0448
Based on the results from Table 6, for the sce-
narios evaluated, model 3 produced, in general, better
results:
• its normalized false detection is the best among
the all models; and
• its normalized predictions are more accurate than
the ones from model 1, that has the best normal-
ized leading time; and
• its normalized leading time is better than the one
from model 2, that has the best normalized pre-
dictions;
6 CONCLUSION AND FUTURE
WORK
In this work we present the framework currently be-
ing used by the AUTOPIA Group for the motion pre-
diction and interaction-aware of vehicles at highways.
Three models for the lane change were implemented
and compared. With the metrics used in this work, the
model from Toledo et al. (2005) yield better results.
A comparison of the motion prediction with two
baseline models was presented. The results from
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
190

SPOT, although more accurate, are too conservative,
leaving the ego vehicle, in some cases with no or al-
most no space for the motion planning. The impor-
tance of interactions modeled with a DBN is high-
lighted when compared with the simple model with
constant velocity, where all the possible corridors
have the same probability and the acceleration input
has no influence in the predictions.
As future work, we intend to use the framework
presented in more complex scenarios, such as high-
ways with entrances and exits, and use public avail-
able datasets.
ACKNOWLEDGEMENTS
This work has been partially funded by the Span-
ish Ministry of Science and Innovation, the Commu-
nity of Madrid through SEGVAUTO 4.0-CM (S2018-
EMT-4362) Programme, and by the European Com-
mission and ECSEL Joint Undertaking through the
Projects NEWCONTROL (826653) and SECREDAS
(783119).
REFERENCES
Althoff, M. (2010). Reachability analysis and its appli-
cation to the safety assessment of autonomous cars.
PhD thesis, Technische Universit¨at M¨unchen, Mu-
nich, Germany.
Althoff, M. (2015). An introduction to cora 2015.
Althoff, M. and Magdici, S. (2016). Set-based prediction of
traffic participants on arbitrary road networks. IEEE
Transactions on Intelligent Vehicles, PP:1–1.
AVSimulation (2019). Scaner studio user manual.
Bender, P., Ziegler, J., and Stiller, C. (2014). Lanelets: Ef-
ficient map representation for autonomous driving. In
2014 IEEE Intelligent Vehicles Symposium Proceed-
ings, pages 420–425.
Kesting, A., Treiber, M., and Helbing, D. (2007). General
lane-changing model MOBIL for car-following mod-
els. Transportation Research Record, (1999):86–94.
Klingelschmitt, S., Damerow, F., Willert, V., and Eggert, J.
(2016). Probabilistic situation assessment framework
for multiple, interacting traffic participants in generic
traffic scenes. In 2016 IEEE Intelligent Vehicles Sym-
posium (IV), pages 1141–1148.
Koschi, M. and Althoff, M. (2017a). Interaction-aware oc-
cupancy prediction of road vehicles. In 2017 IEEE
20th International Conference on Intelligent Trans-
portation Systems (ITSC), pages 1–8.
Koschi, M. and Althoff, M. (2017b). Spot: A tool
for set-based prediction of traffic participants. In
2017 IEEE Intelligent Vehicles Symposium (IV), pages
1686–1693.
Lefevre, S., Laugier, C., and Ibanez-Guzman, J. (2013).
Intention-aware risk estimation for general traffic sit-
uations, and application to intersection safety. Inria
research report, RR-8379.
Mathew, T. V. (2019). Lane changing mod-
els. https://www.civil.iitb.ac.in/tvm/nptel/534\
LaneChange/web/web.html. (Accessed on
11/19/2020).
Medina Lee, J. F., Trentin, V., and Villagra, J. (2019).
Framework for motion prediction of vehicles in a sim-
ulation environment. pages 520–527.
Schulz, J., Hubmann, C., L¨ochner, J., and Burschka,
D. (2018). Interaction-aware probabilistic behav-
ior prediction in urban environments. CoRR,
abs/1804.10467.
Toledo, T., Choudhury, C., and Ben-Akiva, M. (2005).
Lane-changing model with explicit target lane choice.
Transportation Research Record, 1934.
Toledo, T., Koutsopoulos, H., and Ben-Akiva, M. (2003).
Modeling integrated lane-changing behavior. Trans-
portation Research Record, 1857.
Treiber, M., Hennecke, A., and Helbing, D. (2000).
Congested traffic states in empirical observations
and microscopic simulations. Physical Review E,
62(2):1805–1824.
Vechione, M., Balal, E., and Cheu, R. L. (2018). Compar-
isons of mandatory and discretionary lane changing
behavior on freeways. International Journal of Trans-
portation Science and Technology, 7(2):124 – 136.
Villagra, J., Artu˜nedo, A., Trentin, V., and Godoy, J. (2020).
Interaction-aware risk assessment: focus on the lateral
intention. In IEEE 3rd Connected and Automated Ve-
hicles Symposium.
Zechel, P., Streiter, R., Bogenberger, K., and G¨ohner, U.
(2019). Over-approximation of the driver behavior
as occupancy prediction. In 2019 IEEE 14th Interna-
tional Conference on Intelligent Systems and Knowl-
edge Engineering (ISKE), pages 735–742.
Zhan, W., de La Fortelle, A., Chen, Y., Chan, C., and
Tomizuka, M. (2018). Probabilistic prediction from
planning perspective: Problem formulation, repre-
sentation simplification and evaluation metric. In
2018 IEEE Intelligent Vehicles Symposium (IV), pages
1150–1156.
A Comparison of Lateral Intention Models for Interaction-aware Motion Prediction at Highways
191
