
A Flexible Scheduling Architecture of Resource Distribution Proposal for
Autonomous Driving Platforms
Hadi Askaripoor
a
, Sina Shafaei
b
and Alois Knoll
c
Informatics Department, Technical University of Munich, Boltzmannstr. 3, 85748 Garching bei M
¨
unchen, Germany
Keywords:
Scheduling, Resource Planner, Autonomous Driving, Platform Architecture, Decisions Making.
Abstract:
Autonomous driving has attracted a significant amount of attentions over the last ten years. Providing a flexible
platform to schedule the executions of the tasks under hard real-time constraints is also a crucial matter which
needs to be taken into account by the integration of intelligent applications. In this work, we propose a resource
planner, consisting of a monitoring mechanism, context manager, and decision unit which facilitates the timing
requirements in the presence of AI-based applications for the autonomous vehicles.
1 INTRODUCTION
With the rise in the number of on-board sensor de-
vices, rapid changes in urban landmarks and trans-
portation facilities, and the complex road conditions
of people and vehicles, the ability to safely respond
to autonomous vehicles in real-time is constantly in-
creasing. The computing resource capabilities of on-
board hardware are limited, which present a serious
challenge to self-driving vehicles in real-time. The
resource requirements for information processing in
the vehicle’s automatic driving process are different
according to the applications. In the normal driving
scenario, the vehicle only needs to handle the corre-
sponding road conditions smoothly. However, in an
emergency scenario the processing time is as short
as a second, including the calculation of the emer-
gency measures and the time it takes to complete
the emergency measures. The computing resources
of self-driving cars are limited, and the transmission,
the brakes, and the steering modules in the car all re-
quire a reaction time. Furthermore, autonomous ve-
hicles employ plenty of safety-critical applications.
Therefore, if the scheduling strategy is not capable
of guaranteeing the intelligent system’s complete rea-
soning operations and responses to physical abnor-
malities within a certain time period, ending up in
hazardous situations is highly imminent— leading to
catastrophic consequences.
a
https://orcid.org/0000-0002-2570-5010
b
https://orcid.org/0000-0002-9381-0197
c
https://orcid.org/0000-0003-4840-076X
Currently, many useful and practical machine
learning-based applications exist, which are already
integrated in semi-autonomous vehicles and plat-
forms. For example, road image recognition, behav-
ior recognition, object recognition, decision making,
trajectory decision, and down-scaling techniques are
very popular applications among the developed solu-
tions to ease the decision making process for the in-
telligent vehicle. This represents the need to have a
coordinated scheduling mechanism for the resources
and the sensors combined with the highest level of
flexibility that can work with the divers range of the
AI-based applications of the intelligent vehicle plat-
form.
2 RELATED WORK
Machine learning is the core of the AI-based appli-
cation in the intelligent vehicle and its applications
are distributed from the sensory level to the deci-
sion making level. A very intuitive example of this
process is found in the work of (Thammachantuek
et al., 2018a), in which they propose support vec-
tor machines (SVMs) for recognition of road images.
Four actions such as turn left, turn right, forward,
and stop are used as an example to verify the ac-
curacy of classification results. For more complex
scenarios like having the pedestrian near the road,
the authors of (Fang et al., 2018) provide a solution
based on two sensors combining machine learning
techniques to monitor the motion of people. Further-
594
Askaripoor, H., Shafaei, S. and Knoll, A.
A Flexible Scheduling Architecture of Resource Distribution Proposal for Autonomous Driving Platforms.
DOI: 10.5220/0010471605940599
In Proceedings of the 7th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2021), pages 594-599
ISBN: 978-989-758-513-5
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
Zonal Gateway
Zonal Gateway
Zonal Gateway
Zonal Gateway
Zonal Gateway
Resource Planner
Perception Module
Localization Module
Zonal Gateway ECU
Actutor
Sensor
Ethernet TSN Communication
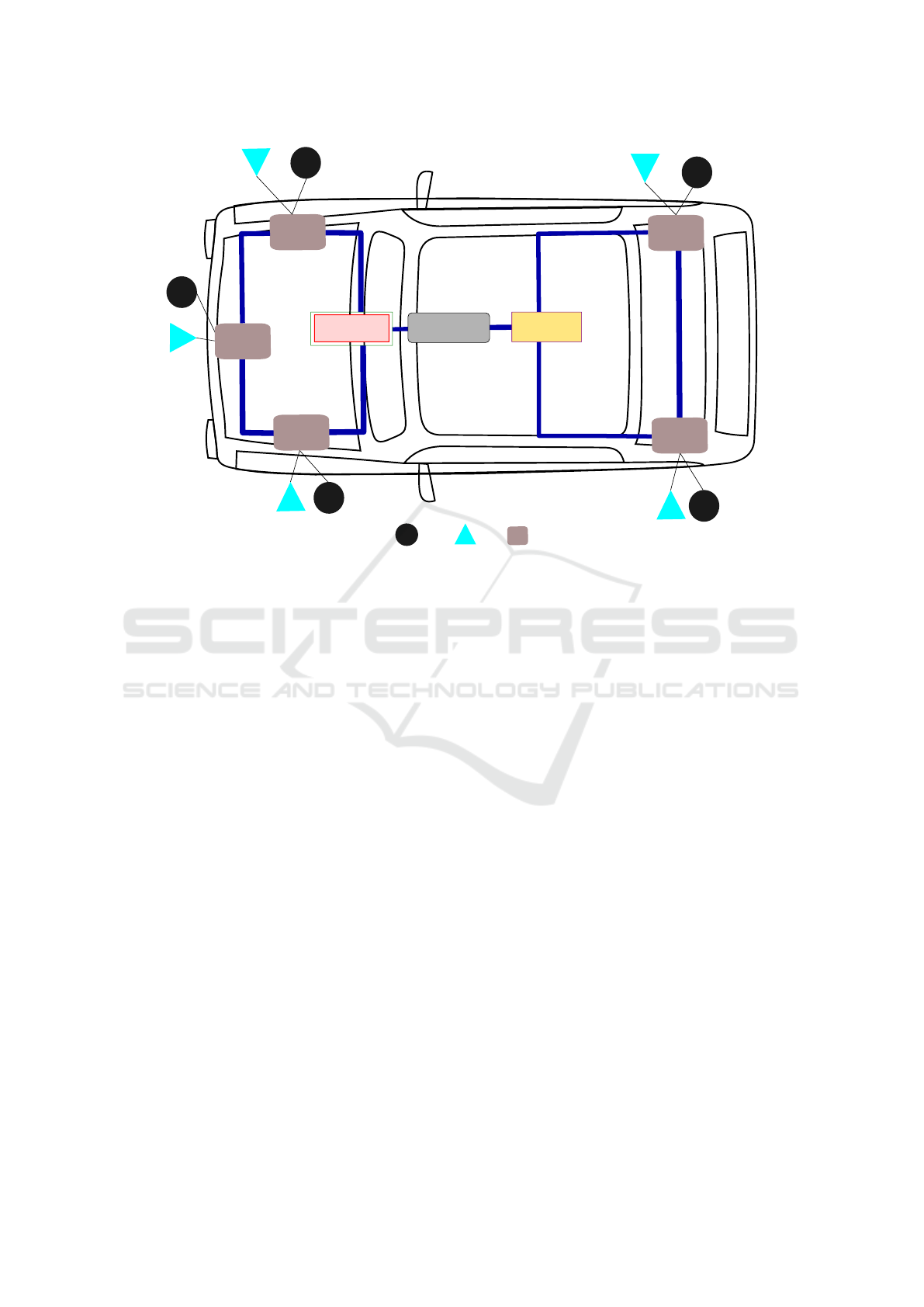
Figure 1: Integration of the proposed resource planner in the platform of E/E architectures.
more, Hayat et al. (Hayat et al., 2018) takes it one
step further and proposes the use of multi-classes ob-
ject recognition by using CNN for this aim. Tham-
machantuek et al. (Thammachantuek et al., 2018b)
focus on decision-making and provide a performance
comparison of well-known supervised learning algo-
rithms such as SVM, MLP, CNN, DT, and RF. At the
end, the outcome of this application will be consumed
by other functions or applications like trajectory plan-
ning. Similar to the work of (Werling et al., 2010), a
trajectory generator may be proposed to generate dif-
ferent trajectories; however, machine learning tech-
niques will be employed on the fly to choose the op-
timal trajectory. This example of dataflow from the
sensors to the applications demonstrates the potential
integration between machine learning solutions and
the importance of having a coordination mechanism
to distribute the available resources to desired entities
within the expected time frame.
Liu and Layland (Liu and Layland, 1973) pro-
posed the earliest deadline first scheduling in their
classic work, which assumes that a multitasking sys-
tem consisting of several independent periodic tasks
runs on a single processor. The earliest deadline
first algorithm is the optimal algorithm on the non-
mixed-critical system which can reach the maximum
resource utilization limit, however in a mixed-critical
system like autonomous vehicle it is unable to guar-
antee that emergency tasks will be executed first. In
terms of fixed-priority scheduling, the earliest dead-
line first algorithm can ensure the high priority of
safety-critical tasks, but the lower-priority tasks can
wait an indefinite amount of time before being exe-
cuted, leading to a higher task starvation and miss-
ing rate of low-priority tasks. Based on fixed-priority
scheduling, an improved machine learning-based al-
gorithm as Fair Emergency First (FEF) is designed
for scheduling (Malik et al., 2019b). A scheduling al-
gorithm requires a framework or platform to be fully
integrated and also the onboard functions to be en-
abled. In this regard, FEF has been recently used as
the core approach of the hybrid agent in the scheduler
model of an autonomous vehicle (Malik et al., 2019a).
Kong and Wu (Kong and Wu, 2005) have proposed a
mechanism which gathers two inputs from the envi-
ronment for processing more dynamic scenarios.
Similarly, Yingzi et al. (Yingzi et al., 2009) pro-
posed a set of dispatching rules which are used to
schedule the task in dynamic task lists. The lists
convert the scheduling problem into a reinforcement
learning problem first, followed by the construction
of a dynamic programming process. Shulga et al.
(Shulga et al., 2016) have aimed to extract the job in
sub-tasks and assign them as multiple threads to com-
putational units; therefore, a making-decision system
is placed ahead of the scheduling unit.
A Flexible Scheduling Architecture of Resource Distribution Proposal for Autonomous Driving Platforms
595
3 METHODOLOGY AND
PROPOSED ARCHITECTURE
In order to compute an architectural proposal based
on predefined optimization goals by collecting system
hardware/software properties and applications with
a focus on artificial intelligence, we propose an ap-
proach in this work and refer to it as resource plan-
ner in the following sections. Our resource planner is
proposed for state-of-the-art electronic and electrical
(E/E) architecture of a vehicle as presented in Figure
1. The architecture of the resource planner consists of
three major mechanisms, namely Monitoring Mecha-
nism, Context Manager, and Decision Unit.
3.1 Monitoring Mechanism
To monitor application timing, we have designed a de-
centralized mechanism that focuses on identification
of timing violations of each application deployed on
the E/E platforms of the vehicle. Since the automotive
applications are divided into the categories of safety-
critical and non-safety critical, the real-time monitor-
ing plays a pivotal role in precisely detecting timing
violations in safety-critical applications. These mech-
anisms have access to all nodes of the car topology,
where each node represents a specific application. In
our considered E/E architecture, as depicted in Figure
1, the monitoring approach is developed in the per-
ception and localization modules to monitor the tim-
ing of running applications for each one of those mod-
ules and the output is forwarded to the resource plan-
ner. As the input of the monitoring approach, timing
requirements related to each application (e.g., start-
ing times and deadlines) as well as the timing order
of each application (i.e., execution priority or paral-
lelism) are provided to the monitoring mechanism.
As the output, in the case of any missing applica-
tion deadline or timing violation, is exclusively imple-
mented on perception and localization modules, the
relevant timing violations are recognized and are for-
warded to a warning segment located in the decision
unit (See Fig. 2).
3.2 Context Manager
This mechanism aims to identify the driving context
of the vehicle. For instance, driving a car into a tun-
nel, in rainy weather conditions, and traffic jam sit-
uation are interpreted as three driving situations. In
order to distinguish the driving context, an interaction
and data exchange must be done between the context
manager mechanism and other modules. More specif-
ically, the vehicle state (computed by the localization
module) as well as the objects around the vehicle (cal-
culated by the perception module) must be identified
simultaneously and fused into context manager in or-
der to compute the current driving context of the car.
Eventually, the result of this mechanism is utilized by
the decision unit. The labeling approach is used to
identify the driving situation in the context manager
with respect to localization and perception calcula-
tion. In other words, the vehicle state and the objects
around it are labeled periodically in such a way that
they make the situation of the vehicle distinguishable
according to its surrounding environments. There-
fore, in case of any updates in the labels, the resource
planner is notified accordingly.
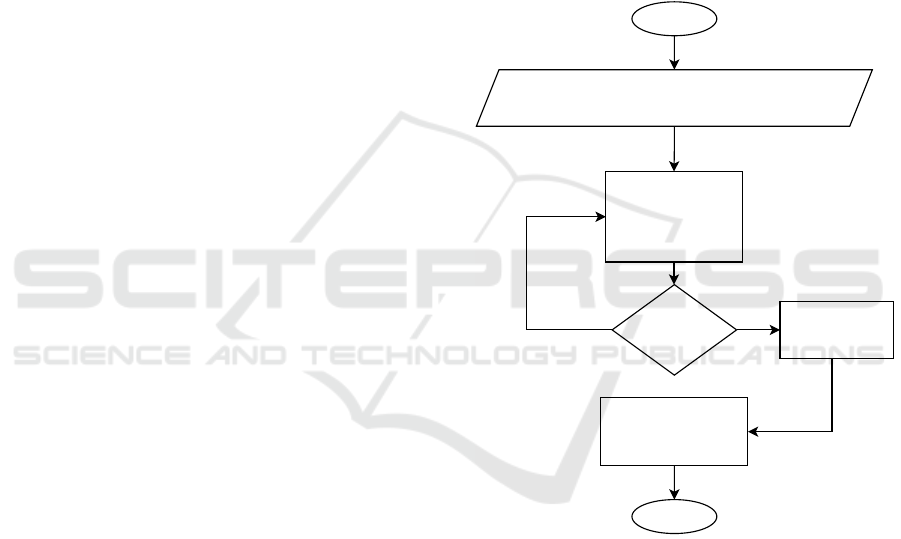
Start
Applications Properties in Design Time: application deadline,
application output signal type (e.g., periodic or aperiodic), safety-
critical, or non-safety-critical type, etc.
Analysis and monitoring
of application timing
requirement during run-
time by monitoring
mechanism
Timing violation
Create a warning
and a proposal by
decision unit
Send the warning and
the proposal to the
violated application by
resource planner
End
Yes
No
Figure 2: The resource planner architecture to identify and
warn the timing violations in the proposed architecture.
3.3 Decision Unit
After recognition of the timing violations by the mon-
itoring mechanism, the result is sent to the warning
segment. In this segment, the violated module which
has missed the application deadline is identified (in
our scenario, the localization or perception module).
Accordingly, a warning regarding the relevant timing
violations generated by the decision unit is transferred
to the module by the resource planner. The module
is then informed about its timing violation, which is
relevant to a running application. Furthermore, a pro-
posal, including a suggested solution to decrease the
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
596
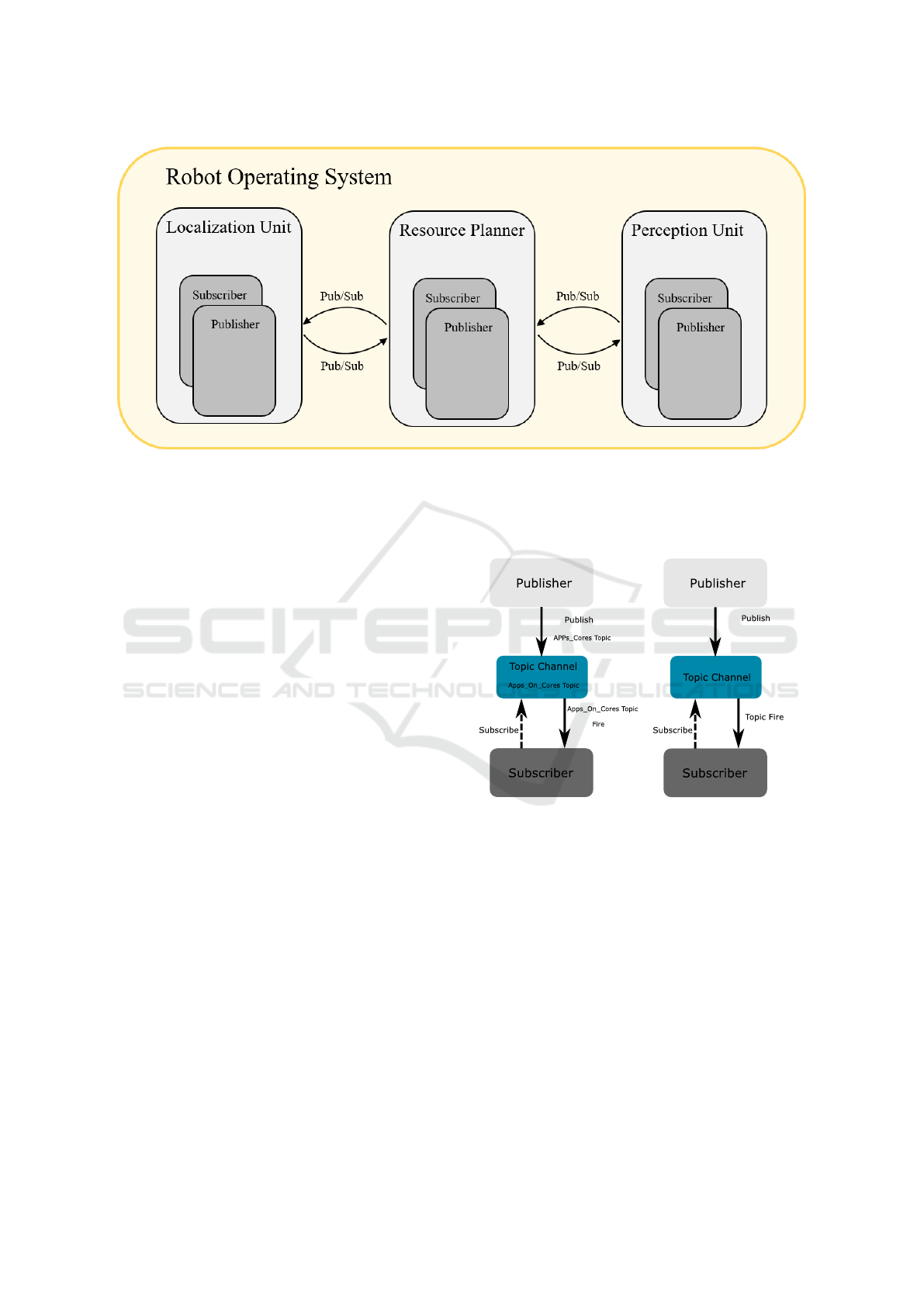
Figure 3: The proposed architecture in ROS2.
timing violations in run-time, e.g., killing the appli-
cations in an optimized and safe manner, is created
by the decision unit. Accordingly, the module, which
has violated the timing requirement of the application,
can utilize the proposed solution to reduce the viola-
tion, while the functional safety point of view of the
applications and other modules must be considered at
run time (e.g., change the running order of the appli-
cations or killing the applications according to safety
aspects). In contrast to our previous work in progress
that the architecture synthesis was going to be per-
formed in the design-time (Askaripoor et al., 2020),
in this study the architecture synthesis is done in run
time focused on timing violations, as shown in Figure
2.
As mentioned above, the result of the context
manager is forwarded to the decision unit as well. In
this unit, after labeling processing and understanding
the current context of the vehicle in real-time, aim is
to proceed with the reduction of the computational
power of the system. For example, when a car drives
into a tunnel, the Global Positioning System (GPS)
will fail; accordingly, detailed and accurate mapping
systems will help prevent accidents. Therefore, the
allocated resources to analyze the GPS data can be
assigned to other critical applications in the case of re-
source shortages. Another situation could be switch-
ing to lidar algorithms in rainy weather instead of
the camera because of the inefficiency of the camera
as the main source. This type of weather results in
killing camera-related algorithms concerning context
changes as well as functional safety aspects. Provid-
ing empty resources—in other words, decreasing the
computational power based on the context changes
as a proposal—is provided by the resource planner.
The created proposal is sent to the relevant modules;
whereas, its usage is only decided by them consider-
ing the functional safety aspects.
RP_Proposal Topic
Figure 4: The publish-subscribe pattern to communicate
with other modules.
We have utilized the publisher-subscriber pattern
to transmit the data between the resource planner and
the other two modules in our considered E/E archi-
tecture, as depicted in Figure 4. For instance, the re-
source planner can publish its proposal to the topic
channel and the localization module can subscribe to
this channel to access the proposal. Conversely, the
core information, including which application is run-
ning on which core, can be published to the topic
channel by a module (e.g., the perception module),
and the resource planner can subscribe to it in order
to acquire the status of the cores and calculate the pro-
posal, which was explained in decision unit, based on
the context manager and monitoring mechanism.
Furthermore, we have used an open-source Robot
A Flexible Scheduling Architecture of Resource Distribution Proposal for Autonomous Driving Platforms
597

Driver
Listener
Preprocessing Ground Filtering Clustering Shape Extraction
Resource Planner
Timing Analysis
Warning Proposal
Figure 5: Identifying the timing violation of the Lidar Object Detection Stack developed in Autoware by resource planner.
Operating System 2 (ROS2)(Thomas et al., 2014)
to implement our proposed publisher-subscriber pat-
tern considering the fact that it also supports real-
time communications. ROS2 employs Data Distri-
bution Service (DDS) as the backbone of the commu-
nications between publishers and subscribers. DDS
is suitable for real-time distributed embedded sys-
tems due to its different transport configurations
(e.g., fault-tolerance and deadline) and scalability
(Maruyama et al., 2016). The proposed architecture
utilized in ROS2 is presented in Figure 3.
4 EVALUATION CRITERIA AND
OUTLOOK
In order to evaluate our proposed approach, we have
defined an automotive use case using Autoware (an
open-source ROS 1/2-based software for self-driving
vehicles)(Kato et al., 2018). Our developed approach
in ROS2 will connect to Autoware in such a way that
the data related to the localization and perception unit
fit into the predefined modules. In the next step, the
resource planner applies its mechanisms for the local-
ization and the perception units.
The topic statistics feature of ROS2 provides the
measurement of statistics for messages received by
any subscription, including message period, message
age, and data type value statistics (Thomas et al.,
2014). By using this method, monitoring the sub-
scription timing of each node related to a specific
application is feasible. However, there are some
limitations regarding this feature (e.g., enabling the
topic statistics only via the subscriber) which must
be solved by modifying the source code of the topic
statistics (e.g., the topic statistics enabled by using
ROS parameters).
Furthermore, using high-resolution clock in C++
programming language allows us to calculate a de-
sired node latency as well as a system latency (Strous-
trup, 2013). According to Figure 5, the node latency
(e.g., clustering) can be calculated by listening to the
time difference between its output and its input while
utilizing high-resolution clock. Similarly, the system
latency for the object detection stack can be com-
puted by subtracting the Shape Extraction node out-
put time and the Driver node input time utilizing the
same clock. In the next step, the timing analysis re-
garding the node or the system is transferred to the
resource planner. Subsequently, the timing violations
are identified, and a warning proposal is sent to the
nodes/system (here, object detection stack) which vi-
olate their timing requirements.
By following this proposed approach, we can
identify the possible timing violations in the system
as well as in the nodes based on our predefined timing
requirements and notify the violated nodes or system.
5 CONCLUSION AND FUTURE
STEPS
In this paper, we presented a resource planning pro-
posal which not only identifies the timing violations
that occurred in AI-based applications but also noti-
fies the violated applications accordingly. Moreover,
the resource planner can recognize the driving con-
text of the vehicle by utilizing the pub/sub approach.
The proposed resource planner includes three meth-
ods such as monitoring mechanism, context manager,
and decision unit. In order to implement and evaluate
this approach, ROS2 and Autoware were specified to
be utilized respectively.
Our future work consists of the following steps,
implementing monitoring, warning mechanisms us-
ing Autoware stack to monitor system and node la-
tencies, measure message drops, and evaluate the ac-
curacy of the proposed warning mechanism.
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
598

Secondly, integrating the resource distribution
mechanism, in the case of any core fails in a multicore
computational unit. In other words, the resource plan-
ner will recognize cores failure and then will assign
the safety-critical application, which was running on
the failed core, to the other non-safety-critical core,
which has a non-safety-critical application running.
Consequently, it will cause in distributing the con-
sumption of the cores and minimizing the message
drops, and timing latencies for safety-critical applica-
tions.
ACKNOWLEDGEMENTS
This work is part of the project ”KI-FLEX” (project
number 16ES1027) which is funded by German Fed-
eral Ministry of Education and Research (BMBF)
within the framework of the guidelines on promoting
research initiatives in the field of “AI-based electronic
solutions for safe autonomous driving.
REFERENCES
Askaripoor, H., Farzaneh, M. H., and Knoll, A. (2020).
Considering safety requirements in design phase of
future e/e architectures. In 2020 25th IEEE Interna-
tional Conference on Emerging Technologies and Fac-
tory Automation (ETFA), volume 1, pages 1165–1168.
IEEE.
Fang, C.-C., Mou, T.-C., Sun, S.-W., and Chang, P.-
C. (2018). Machine-learning based fitness behavior
recognition from camera and sensor modalities. In
2018 IEEE International Conference on Artificial In-
telligence and Virtual Reality (AIVR), pages 249–250.
IEEE.
Hayat, S., Kun, S., Tengtao, Z., Yu, Y., Tu, T., and Du,
Y. (2018). A deep learning framework using convo-
lutional neural network for multi-class object recog-
nition. In 2018 IEEE 3rd International Conference
on Image, Vision and Computing (ICIVC), pages 194–
198. IEEE.
Kato, S., Tokunaga, S., Maruyama, Y., Maeda, S.,
Hirabayashi, M., Kitsukawa, Y., Monrroy, A., Ando,
T., Fujii, Y., and Azumi, T. (2018). Autoware on
board: Enabling autonomous vehicles with embedded
systems. In 2018 ACM/IEEE 9th International Con-
ference on Cyber-Physical Systems (ICCPS), pages
287–296. IEEE.
Kong, L.-F. and Wu, J. (2005). Dynamic single machine
scheduling using q-learning agent. In 2005 Interna-
tional Conference on Machine Learning and Cyber-
netics, volume 5, pages 3237–3241. IEEE.
Liu, C. L. and Layland, J. W. (1973). Scheduling algo-
rithms for multiprogramming in a hard-real-time en-
vironment. Journal of the ACM (JACM), 20(1):46–61.
Malik, S., Ahmad, S., Kim, B. W., Park, D. H., and Kim,
D. (2019a). Hybrid inference based scheduling mech-
anism for efficient real time task and resource man-
agement in smart cars for safe driving. Electronics,
8(3):344.
Malik, S., Ahmad, S., Ullah, I., Park, D. H., and Kim,
D. (2019b). An adaptive emergency first intelli-
gent scheduling algorithm for efficient task manage-
ment and scheduling in hybrid of hard real-time and
soft real-time embedded iot systems. Sustainability,
11(8):2192.
Maruyama, Y., Kato, S., and Azumi, T. (2016). Ex-
ploring the performance of ros2. In Proceedings of
the 13th International Conference on Embedded Soft-
ware, pages 1–10.
Shulga, D., Kapustin, A., Kozlov, A., Kozyrev, A., and
Rovnyagin, M. (2016). The scheduling based on ma-
chine learning for heterogeneous cpu/gpu systems. In
2016 IEEE NW Russia Young Researchers in Electri-
cal and Electronic Engineering Conference (EICon-
RusNW), pages 345–348. IEEE.
Stroustrup, B. (2013). The C++ programming language.
Pearson Education.
Thammachantuek, I., Kosolsombat, S., and Ketcham, M.
(2018a). Support vector machines for road images
recognition in autonomous car. In 2018 18th Interna-
tional Symposium on Communications and Informa-
tion Technologies (ISCIT), pages 291–293. IEEE.
Thammachantuek, I., Kosolsomnbat, S., and Ketcham, M.
(2018b). Comparison of machine learning algorithm’s
performance based on decision making in autonomous
car. In 2018 International Joint Symposium on Arti-
ficial Intelligence and Natural Language Processing
(iSAI-NLP), pages 1–6. IEEE.
Thomas, D., Woodall, W., and Fernandez, E. (2014). Next-
generation ROS: Building on DDS. In ROSCon
Chicago 2014, Mountain View, CA. Open Robotics.
Werling, M., Ziegler, J., Kammel, S., and Thrun, S. (2010).
Optimal trajectory generation for dynamic street sce-
narios in a frenet frame. In 2010 IEEE International
Conference on Robotics and Automation, pages 987–
993. IEEE.
Yingzi, W., Xinli, J., Pingbo, H., and Kanfeng, G. (2009).
Pattern driven dynamic scheduling approach using re-
inforcement learning. In 2009 IEEE International
Conference on Automation and Logistics, pages 514–
519. IEEE.
A Flexible Scheduling Architecture of Resource Distribution Proposal for Autonomous Driving Platforms
599
