
A Dependency-based Combinatorial Approach for Reducing Effort for
Scenario-based Safety Analysis of Autonomous Vehicles
Kaushik Madala
1
, Hyunsook Do
1
and Carlos Avalos-Gonzalez
2
1
Department of Computer Science and Engineering, University of North Texas, Denton, U.S.A.
2
kVA by UL, Portland, U.S.A.
Keywords:
Scenario-based Analysis, Safety Verification, Operation Design Domain, Autonomous Vehicle Safety.
Abstract:
For an autonomous vehicle, to assure safety, we need to perform a thorough analysis considering the vehicle’s
intended operational design domain (ODD). This requires analysts and engineers to consider various operat-
ing environments (OEs) that can occur in the ODD, and the various scenarios that are possible within each
OE. However, the automotive safety standards ISO 26262 and ISO 21448 do not offer in-depth guidance on
what and how many scenarios need to be analyzed to ensure safety of a vehicle. Moreover, many existing
simulation tools and verification approaches consider limited OEs and generate test cases exhaustively for
each scenario created by engineers within an OE. Such an analysis requires a significant amount of time and
effort, but it still cannot ensure that various dependencies among ODD elements are covered. To address
these limitations, we propose a dependency-based combinatorial approach (DBCA), which uses in-parameter-
order-general (IPOG), a combinatorial testing algorithm to generate OEs and test cases for each scenario. To
evaluate DBCA, we applied it to the ODD elements extracted from ISO 21448, and to a highway cut-in sce-
nario. Our results show that DBCA reduced time and effort for analysis, and reduced the the number of OEs
and test cases for the scenario without missing dependencies.
1 INTRODUCTION
Scenario-based analysis plays a vital role in assur-
ing safety of an autonomous vehicle because vari-
ous known and unknown hazardous scenarios that
occur within a vehicle’s operational design domain
(ODD) can comprise the safety of the vehicle. Al-
though the automotive industrial safety standards ISO
26262 (ISO, 2018) and ISO 21448 (ISO/PAS, 2020)
offer guidance on how to analyze functional safety
(FuSa) and safety of the intended functionality (SO-
TIF) of a vehicle respectively, they do not offer in-
depth guidance on how to generate scenarios for an-
alyzing safety of a vehicle, and what and how many
scenarios will ensure that a vehicle is safe enough to
be deployed.
The current methods (Kalra and Paddock, 2016;
Akagi et al., 2019; Althoff and Lutz, 2018) for an-
alyzing safety of autonomous vehicles rely on either
the amount of miles traveled by the autonomous ve-
hicles or by verifying the behavior of vehicles mostly
on known safety-critical driving scenarios and then
ensuring that the vehicles meet a predefined valida-
tion target (set by experts based on naturalistic driv-
ing data(VTTI, 2020b; VTTI, 2020a) or accident
based data (NHTSA, 2018)). For example, Altoff
and Lutz (Althoff and Lutz, 2018) proposed an ap-
proach for generating test cases for possible safety
critical scenarios for a vehicle based on its drivable
area. While these existing approaches aid in identify-
ing potential situations in which an autonomous ve-
hicle’s safety might be compromised, they still suffer
from the following limitations:
• Current approaches used in hazard analysis in
both Part 3 of ISO 26262, and Part 6 of ISO
21448 rely on brainstorming of experts to identify
scenarios and their corresponding operating envi-
ronments. If some scenarios or environments are
missed/overlooked during this analysis, then they
are not tested during simulation.
• The amount of miles becomes an effective met-
ric only if diverse and representative scenarios are
covered. If vehicle fleets are tested on the same
road in simulation or in the real world, it is pos-
sible to miss some scenarios and operating condi-
tions that can occur within the defined ODD.
• Current safety-critical scenario generation ap-
Madala, K., Do, H. and Avalos-Gonzalez, C.
A Dependency-based Combinatorial Approach for Reducing Effort for Scenario-based Safety Analysis of Autonomous Vehicles.
DOI: 10.5220/0010495502350246
In Proceedings of the 7th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2021), pages 235-246
ISBN: 978-989-758-513-5
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
235

proaches take into account different possible driv-
ing scenarios for a fixed environment, i.e., for a
fixed set of ODD elements and their attributes.
However, driving scenarios are just a part of
operating scenarios for an autonomous vehicle.
For a vehicle with driving automation, as men-
tioned in ISO 21448, to identify a scenario, we
should consider the combination of environmen-
tal factors (e.g., snowfall, rain), driving scenarios
(e.g., overtaking a vehicle, performing cut-in in
front of a vehicle), behaviors of agents involved
(e.g., pedestrians, other vehicles), road geometry
(e.g., straight road), road infrastructure (e.g., traf-
fic signs) and goals/objectives of the scenario i.e.,
the tasks we want to accomplish in the scenario
(e.g, an ego vehicle should stop when a pedestrian
is crossing the road in city streets).
Moreover, the current simulation tools (e.g.,
CARLA (Dosovitskiy et al., 2017), Fortellix (Fortel-
lix, 2020)) require to create operating environments
before testing scenarios and most of the operating en-
vironments have been created based on customers’
needs (Fadaie, 2019). However, whether these oper-
ating environments can cover the entire operational
design domain (ODD) defined by engineers of au-
tonomous vehicles is not verified. Also, most of the
current simulation tools perform exhaustive testing,
i.e., generating all possible test cases for each sce-
nario with all discrete parameter values, their ranges
and increments initialized by the engineers and run-
ning simulations within a fixed operating environ-
ment. While tools such as Fortellix (Fortellix, 2020)
offers a means to combine scenarios and operating
conditions, the scenario description is restricted to
Open M-SDL (Fortellix, 2020) specification, which
does not require to have all the essential ODD el-
ements and attributes we aim to cover as a part of
the ODD. Performing analysis with such tools does
not account for overlooked ODD elements or their
attributes. For example, if an attribute of a pedes-
trian such as race or gender cannot be set in a simula-
tion tool despite the presence of the attribute in ODD,
it may be ignored during the verification using sim-
ulation. Further, given the complexity of ODD for
autonomous vehicles, simulating all potential scenar-
ios with operating environments might not be feasi-
ble. This is because the need for resource (e.g., time
and effort) increases as the complexity of the ODD
increases.
For example, let us consider the following factors
that are part of ODD (taken from Table B.3 of ISO
21448): climate, time of the day, road shape, road fea-
ture (e.g., tunnel, gate), condition of the road, light-
ing (e.g., glare), condition of the ego vehicle (e.g., a
sensor covered by dust), operation of the ego vehi-
cle (e.g., a vehicle is stopping), surrounding vehicles
(e.g., a vehicle to the left of the ego vehicle), road par-
ticipants (e.g., pedestrians), surrounding objects off-
roadway (e.g., a traffic sign), objects on the roadway
(e.g., lane markings). Each of these factors can have
multiple values. For example, for ‘time of the day,’ its
values can be early morning, daytime, evening, and
nighttime. Based on the values given in Table B.3
of ISO 21448, the total number of combinations for
ODD factors is 169,554,739,200. Note that we have
not considered properties of agents (e.g., gender of a
pedestrian), vehicles (e.g., speed of the vehicle), en-
vironmental attributes (e.g., amount of snowfall) yet.
These combinations only represent operating en-
vironments and are still not complete as multiple
agent types and vehicle types are not considered. For
each of these combinations, we need to generate in-
stances of scenarios to test by considering properties
of the agents, environmental attributes, and an ego ve-
hicle. Examples of properties are the amount of rain-
fall (environmental), the number of randomly initial-
ized pedestrians (agents related), and a speed range
of the vehicle (ego vehicle related). The properties
values are manually selected/initialized by the simu-
lation engineers and experts. Test cases for simulation
are generated based on these properties by consider-
ing all possible combinations among the properties.
In the example properties considered above, if we as-
sume rainfall can range from 0 cm to 10 cm with an
increment of 0.5 cm, the number of randomly initial-
ized pedestrians can range from 0 to 20, with an incre-
ment of 1, and the speed range of a vehicle is consid-
ered to be between 30 mph and 90 mph, with an incre-
ment of 5 mph, then an exhaustive testing strategy re-
sult will be 21 (for rainfall)× 21 (for pedestrians)× 13
(for the speed range) = 5733 tests. As the number of
properties, their ranges, and their increments change,
this will result in a large number of tests. Creating a
large number of operating environments and perform-
ing exhaustive testing can be very expensive and of-
ten it is not feasible to do so. Moreover, analyzing
test cases that expose collisions and near misses from
a significantly large number of test cases is difficult as
often experts need to manually analyze the causes of
collisions and near misses.
To address these limitations, we propose a
dependency-based combinatorial approach (DBCA)
for operating environment identification and test suite
optimization for analysis of scenarios. DBCA utilizes
IPOG (Lei et al., 2007; Lei et al., 2008), a widely
used combinatorial testing algorithm, to generate t-
way combinations of operating environments and test
cases for each scenario defined in those operating en-
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
236

vironments. We chose a combinatorial approach be-
cause it is found to be effective and efficient in test-
ing highly configurable systems (Kuhn et al., 2010;
Wotawa, 2017), which require to run without failures
on many thousands of configurations. Because au-
tonomous vehicles also need to ensure safety of the
system under various operating conditions, we be-
lieve a combinatorial approach will be a perfect solu-
tion for reducing the complexity of their safety anal-
ysis. The ‘t’ value in t-way combinations is manu-
ally chosen based on the dependencies among factors
being considered to generate operating environments
and instances of scenarios. To evaluate whether our
approach can aid in identifying as well as reducing
the number of operating environments and instances
of scenarios that needs to be considered for verify-
ing safety of an autonomous vehicle, we performed
a case study using Metamoto, a simulation tool. Our
results show that our approach is effective at reducing
the number of test cases for a scenario without affect-
ing the detection of collisions when compared to ex-
haustive approach. We also found that it is important
to consider the different operating environments that
need to be considered based on ODD defined for an
autonomous vehicle as we found that often only lim-
ited ODD is considered in simulation thereby missing
potential unknown scenarios. Note that in this paper,
we restrict our analysis to vehicle level behavior and
do not discuss machine learning safety-based verifi-
cation.
The rest of the paper is organized as follows. Sec-
tion 2 discusses background and related work. Sec-
tion 3 explains DBCA approach and Section 4 dis-
cusses the empirical study, its results, and threats.
Section 5 details the insights from results and limi-
tations of DBCA. Finally, we conclude in Section 6.
2 TERMINOLOGY AND
RELATED WORK
In this section, we discuss the various terminologies
we use throughout the paper and the related literature
to DBCA.
2.1 Terminology and Their Descriptions
1. Ego Vehicle: It is the autonomous system for
which we perform analysis.
2. Operational Design Domain (ODD): It is defined
as a set of conditions that includes environmen-
tal factors, road infrastructural elements, agents
around vehicles, and various driving scenarios for
which a system or a feature of the system is de-
signed (BSI/PAS, 2020; ISO/PAS, 2020).
3. ODD Element: An entity or agent that is part
of the ODD. For example, weather and pedestri-
ans are ODD elements. Every ODD element has
corresponding values. For example, weather can
have multiple values: rainy, snowy, and sunny.
Every ODD element and every value of an ODD
element can have associated properties. For ex-
ample, when the weather is snowy, we can have a
property such as the amount of snowfall.
4. Operating Environment: The environment in
which an ego vehicle operates. It usually includes
the agents, road infrastructure and environmental
factors. An operating environment is a subset of
ODD, i.e., for a given ODD, we can identify many
operating environments. An example of an oper-
ating environment is a wet and straight highway
road with 3 lanes that has trucks and vehicles on
it, where the ego vehicle is moving forward.
5. Scenario: A scenario is a temporal sequence of
situations with actions and events in an operat-
ing environment where an ego vehicle aims to
achieve goals and objectives defined by the engi-
neers (ISO/PAS, 2020). In a given operating en-
vironment, multiple scenarios can occur. For the
highway operating example discussed previously,
a scenario can be for the ego vehicle to reach des-
tination B without a collision while a lead vehi-
cle brakes suddenly. Note that every scenario can
have multiple instances. For the scenario exam-
ple discussed previously, we can generate various
instances by considering different separating dis-
tances between the lead and the ego vehicles, and
various braking force values for the lead vehicle.
6. IPOG Algorithm (Lei et al., 2007; Lei et al.,
2008): A combinatorial testing algorithm used to
generate t-way combinations of parameter values.
The value of ‘t’ is smaller when compared to the
total number of parameters. A t-way combina-
tion implies all combinations between any ‘t’ el-
ements are considered. For example, if we have
four parameters p1, p2, p3 and p4 with two val-
ues each, 2-way combinations of the parameters
represent the combinations in which all possible
pairs of values between every two parameters are
considered. In DBCA, we use IPOG algorithm
to generate combinations of ODD elements and
combinations of properties to generate instances
of a scenario.
7. Functional Safety (FuSa): It is a characteristic of
a system in which malfunctions of electrical and
electronic components do not result in an unrea-
A Dependency-based Combinatorial Approach for Reducing Effort for Scenario-based Safety Analysis of Autonomous Vehicles
237

sonable risk (ISO, 2018). The process of func-
tional safety analysis for automotive systems is
detailed in ISO 26262 (ISO, 2018).
8. Safety Of The Intended Functionality (SOTIF):
Unlike functional safety, safety of the intended
functionality is an absence of unreasonable risk
due to insufficiencies in defining the functionali-
ties of the system (ISO/PAS, 2020). SOTIF aids in
reducing unknown risks as well as gaps in require-
ments and design. The SOTIF analysis process
for vehicles with driving automation is detailed in
ISO 21448 (ISO/PAS, 2020).
9. Exhaustive Simulation: If we run all possible
combinations of the parameters’ values for a given
scenario in a simulation tool, then we refer to it as
an exhaustive simulation. It takes significantly a
high amount of time and resources.
2.2 Related Work
Generating scenarios for testing autonomous vehicles
is a challenging task. Koopman and Wagner (Koop-
man and Wagner, 2016) have indicated that complete
testing is infeasible for an autonomous vehicle. To
address this problem, to date, many researchers (Li
et al., 2020; Mullins et al., 2018; Nonnengart et al.,
2019; Akagi et al., 2019) have proposed techniques
to generate scenarios for simulation.
Some researchers (Li et al., 2020; Rocklage et al.,
2017; Duan et al., 2020; Gannous and Andrews,
2019) used combinatorial approaches to generate sce-
narios. For example, Li et al. (Li et al., 2020) pro-
posed an ontology-based combinatorial testing ap-
proach, in which ontology is used to identify param-
eters and their values, which are then given as input
to the combinatorial algorithm that generates n-way
combinations. The authors further refine these combi-
nations to identify test cases corresponding to critical
scenarios by using a machine learning model. An-
other example is the static and hybrid scenario gen-
eration approach proposed by Rocklage et al. (Rock-
lage et al., 2017), in which the authors use combinato-
rial interaction testing to identify feasible trajectories
for motion planning in a given scenario using a back-
tracking algorithm for solving the constraints defined
for checking feasibility of trajectory.
Other researchers (Cal
`
o et al., 2020; Mullins et al.,
2018) have proposed search-based techniques to gen-
erate scenarios. For example, Mullins et al. (Mullins
et al., 2018) proposed a framework for generating
scenarios using search strategy that performs adap-
tive sampling using surrogate optimization to iden-
tify high quality scenarios, followed by density based
clustering to group the scenarios in the order of their
effectiveness.
A few researchers (Nonnengart et al., 2019; Al-
thoff and Lutz, 2018) have proposed formal ap-
proaches to generate scenarios for autonomous ve-
hicles. For example, Nonnengart et al. (Nonnengart
et al., 2019) proposed a formal-method based ap-
proach called CriSGen, which is used to generate crit-
ical scenarios by formalizing abstract scenarios and
maneuvers and then performing a forward reachabil-
ity analysis to identify if a maneuver can result in an
unsafe state.
In addition to the aforementioned methodologies,
some researchers (Akagi et al., 2019; Koopman and
Wagner, 2016) have also used naturalistic driving
data (VTTI, 2020b; VTTI, 2020a; van Nes et al.,
2019) to generate scenarios. An example is the
framework by Akagi et al. (Akagi et al., 2019), in
which the authors generate scenarios from a prob-
abilistic model built using naturalistic driving data
(e.g., SHRP2 (VTTI, 2020b)), and sampling vehicle
kinetic information and traffic risk index values.
While these techniques aid in identifying critical
scenarios, they do not consider whether the operating
environments they use cover all the ODD elements.
Moreover, to test a scenario, the techniques either pro-
duce test cases of parameters defined for the scenario
either randomly or exhaustively. However, random
generation of tests does not guarantee to cover the
dependencies among systems’ components and ODD
elements, and exhaustive testing requires a significant
amount of effort, time, and resources. Using DBCA,
we aim to overcome these limitations.
3 APPROACH
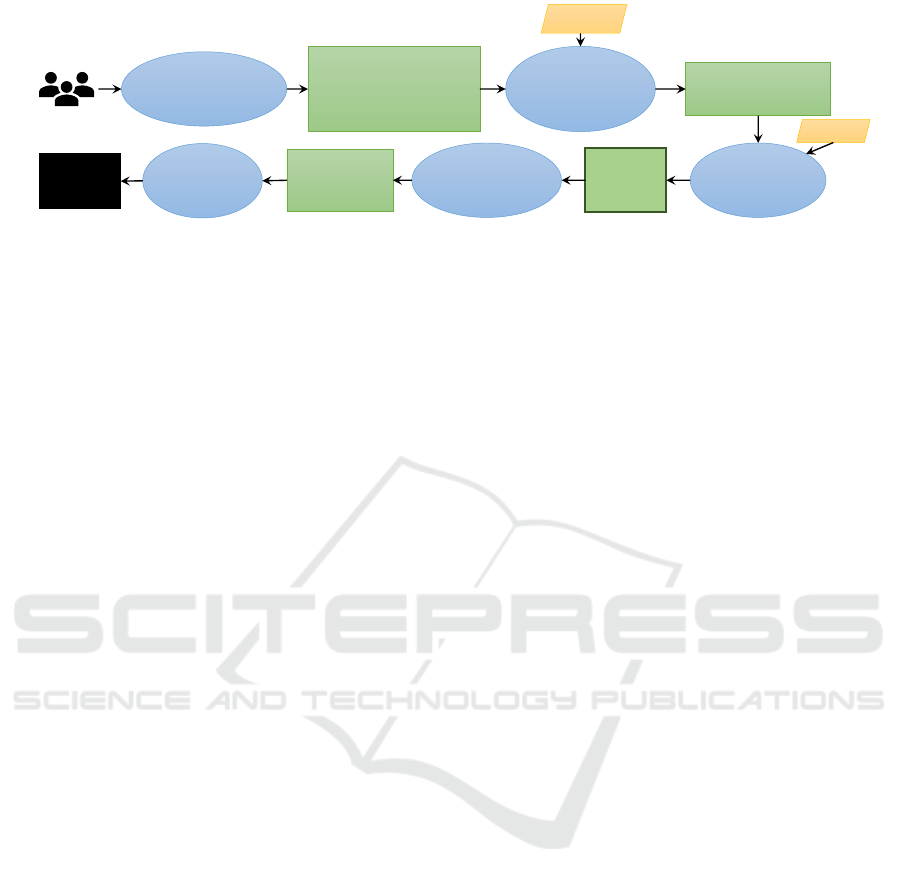
The overview of dependency-based combinatorial ap-
proach (DBCA) is shown in Figure 1. The ovals rep-
resent the steps in the approach and the rectangles rep-
resent the outputs from the steps which can be used
as inputs to their next steps. The parallelogram repre-
sents the existing combinatorial algorithm we use in
DBCA. The numbers in the ovals represent the step
numbers. Each step is described in detail as follows.
Step 1. Define ODD and Dependencies. As a first
step of DBCA, we (stakeholders) define ODD of the
autonomous vehicle being analyzed. While ODD is
usually refined when performing the hazard analy-
sis and risk assessment conducted during the SOTIF
analysis, in this paper, we assume that ODD has al-
ready been refined and considered, and we focus more
on identifying operating environments and optimiz-
ing test cases to verify a scenario in simulation. As
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
238
1. Define ODD
and
dependencies
ODD elements, their
values, and
dependencies among
elements
2. Generate
operating
environments
(OE)
Operating
environments (OEs)
3. Generate
scenarios
for each OE
Stakeholders
Scenarios
4. Generate
test cases for
simulation
Test cases for
simulation
5. Run
simulation
Collision
cases
IPOG
IPOG
Figure 1: Overview of dependency-based combinatorial approach (DBCA).
mentioned in Section 2, ODD comprises of ODD ele-
ments, their values, and properties. ODD elements in-
clude environmental factors (e.g., weather, time of the
day), agents (e.g., surrounding vehicles on the road),
road infrastructure (e.g., traffic signs, zones, junc-
tions) and operations of the autonomous vehicle under
analysis, i.e., an ego vehicle (e.g., a vehicle is making
a left turn). A sample of the detailed list of ODD can
be found in BSI:PAS 1883 (BSI/PAS, 2020).
Every ODD element has corresponding values.
For example, weather can have values such as rainy,
snowy, cloudy, and clear. Every ODD element value
can have its associated properties/parameters. For
example, when the ODD element is weather and its
value is rainy, we can have a property such as the
amount of rain. After the ODD elements, their val-
ues, and properties are defined, we identify depen-
dencies among ODD elements by considering their
values. For example, let us consider three ODD el-
ements: weather, road condition, and time of the day.
Weather can affect a road condition. For example,
a road that is not leveled properly might have pud-
dles when the weather is rainy. Hence, we consider
a dependency between weather and a road condition.
However, a road condition and weather do not affect
time of the day. Hence, we do not consider them to
be having any dependencies. We identify all such de-
pendencies and the absence of dependencies among
ODD elements.
In this paper, due to a lack of support for auto-
matic dependency identifications by the state-of-the-
art techniques, we identify dependencies manually
because it helps us in providing sufficient evidence
and justification during safety assessment of the vehi-
cle that our combinatorial approach reduced the num-
ber of operating environments and test cases for sce-
narios without overlooking any dependencies among
ODD elements.
Step 2. Generate Operating Environments. Af-
ter the dependencies among ODD elements are identi-
fied, we find the maximum number of ODD elements
that are dependent on each other. We identify this
maximum number as ‘t’ that is applied to IPOG (Lei
et al., 2007; Lei et al., 2008), a widely used combi-
natorial testing algorithm to produce t-way combina-
tions of ODD elements along with their values. These
combinations represent the potential operating envi-
ronments.
Let us consider the example of ODD elements we
have chosen in the previous step. The elements are
weather, a road condition, and time of the day. Let us
assume each of the elements to be having the follow-
ing values: weather - {rainy, snowy, cloudy, clear}
(4 values), road condition - {dry, wet with puddles,
wet with no puddles} (3 values), time of the day -
{day, dusk/dawn, night} (3 values). For this sim-
ple set of ODD elements, if we plan to generate all
possible combinations, we get 4×3×3 = 36 combi-
nations. However, as mentioned in the previous step,
only weather and road condition have a dependency
(e.g., a rainy weather can result in a wet road with
puddles). So, as long as we are able to cover all pos-
sible combinations between weather and road condi-
tion, we will be considering all possible dependencies
among elements. Hence, the ‘t’ values will be 2 for
this example. When we generate 2-way combinations
of the three ODD elements, 36 combinations reduce
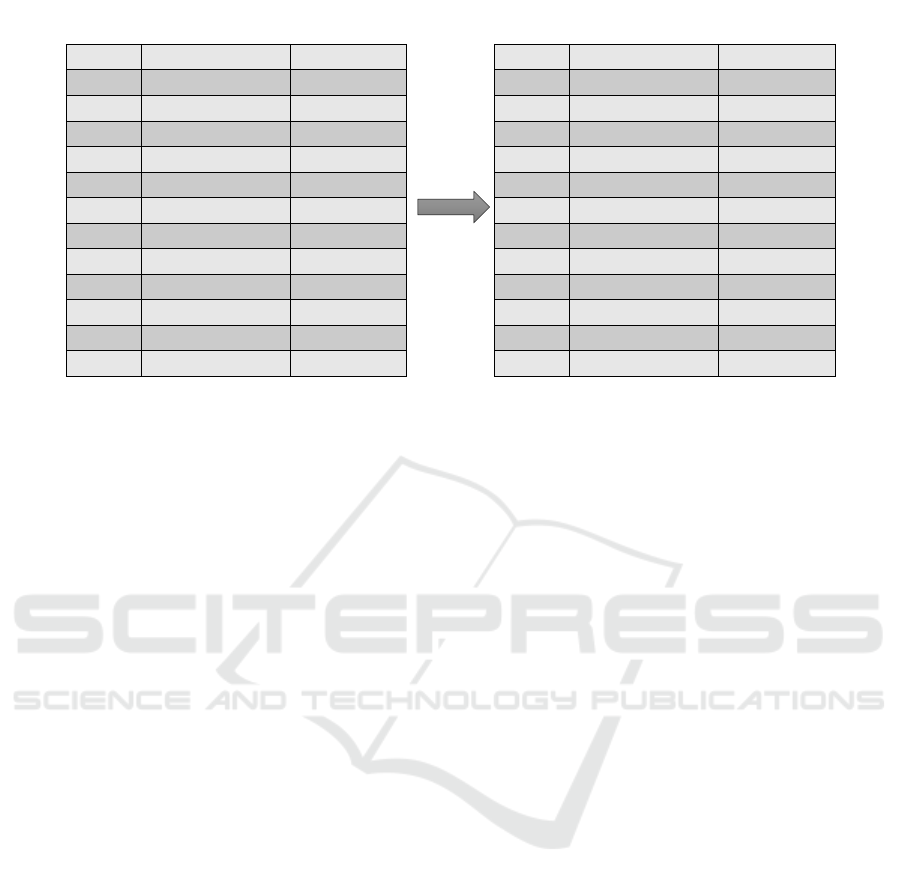
to 12 combinations. Figure 2 illustrates the reduction
in the combinations. It can be observed from the fig-
ure that the 2-way combinations not only covered all
possible combinations between {weather, road condi-
tion}, but also covers all possible combinations be-
tween {road condition, time of the day}, and {time of
the day, weather}.
We then go through these combinations that rep-
resent operating environments and check if the simu-
lation tool has environments that match the required
operating environments. If the tool does not offer
such environments, we request the engineers who are
responsible for the simulation tools to develop re-
A Dependency-based Combinatorial Approach for Reducing Effort for Scenario-based Safety Analysis of Autonomous Vehicles
239
Weather
Road condition
Time of the day
Rainy
Wet without puddles
Day
Rainy
Wet without puddles
Dawn/Dusk
Rainy
Wet without puddles
Night
Rainy
Wet with puddles
Day
…..
…..
…..
…..
…..
…..
Clear
Wet with puddles
Day
Clear
Wet with puddles
Dawn/Dusk
Clear
Wet with puddles
Night
Clear
Dry
Day
Clear
Dry
Dawn/Dusk
Clear
Dry
Night
Weather
Road condition
Time of the day
Rainy
Wet without puddles
Day
Rainy
Wet with puddles
Night
Rainy
Dry
Dusk/Dawn
Cloudy
Dry
Night
Cloudy
Wet with puddles
Day
Cloudy
Wet without puddles
Dusk/Dawn
Snowy
Dry
Day
Snowy
Wet with puddles
Dusk/Dawn
Snowy
Wet without puddles
Night
Clear
Dry
Day
Clear
Wet with puddles
Dusk/Dawn
Clear
Wet without puddles
Night
All possible combinations between the
three ODD elements
Total combinations = 36
2-way
IPOG
2-way combinations = 12
All possible combinations between every two ODD
elements are covered
Figure 2: Example of illustrating the reduction in the number of combinations of ODD elements using combinatorial approach.
quired environments by providing information on the
elements that need to be present in those environ-
ments respectively.
Step 3. Generate Scenarios for Each Operating
Environment (OE). As mentioned above, we con-
sider each combination of ODD elements along with
their corresponding values as an operating environ-
ment. In a given operating environment, various sce-
narios can occur. This is because according to ISO
21448 (ISO/PAS, 2020), every scenario requires to
have a goal or objective defined. An example of a
goal can be ”an ego vehicle travels from location A to
location B in the map in 5 minutes without any col-
lision.” Because this approach relies on expertise of
engineers, in our approach, defining goals and objec-
tives is manual.
Each scenario can have multiple unique instances
because the various properties and parameters can be
associated with each ODD element. For example, if
we consider the weather to be rainy, the road condi-
tion to be wet with puddles, and time of the day to
be night, then their corresponding properties can be
the amount of rainfall, the density of the road pud-
dles (the number of puddles per square meter in a
road), and time in PM/AM. Note that the properties
of the ODD elements must be chosen based on the
goals/objectives of the scenario.
Let us assume, that we have a rainfall range estab-
lished from 0 cm to 15 cm with an increment of 1 cm
(a total of 16 values), the density of road puddles to
be ranging from 0 to 1, with an increment of 0.1 (a
total of 11 values), and time in PM/AM to be rang-
ing from 7 PM to 4 AM, with an one hour increment
(10 values). Let us also assume that we have consid-
ered the ego vehicle to be traveling in a straight line
at 60 kmph. For this circumstance and given prop-
erty values, the total number of possible instances of
a high-level scenario that can occur within an operat-
ing environment is 16×11×10 = 1760 combinations.
However, as the number of ODD elements, their
values, their properties and the ranges of the proper-
ties increase, the number of combinations rise dras-
tically. Hence, similar to previous step, we iden-
tify dependencies among properties/parameters of the
ODD elements and identify a ‘p’ value, where ‘p’ is
the maximum number of properties/parameters which
can affect each other. In the above example, the
amount of rainfall, time in PM/AM and density of
puddles are not dependent on each other. However,
the amount of the rainfall might affect the puddle wa-
ter level. Hence, we can define ’p’ as 2. When we
generate 2-way combinations for the three properties,
the number of combinations is reduced from 1760 to
176.
Step 4. Generate Test Cases for Simulation.
Once the various instances that need to be consid-
ered for each scenario along with its corresponding
goals/objectives are identified, test cases are gener-
ated. This is done by using simulation tools, where
we can specify the property values, their range and
associated increment. If such a functionality is not
present, the test cases need to be created manually or
we need to write a script which offers automated sup-
port to run simulation for various cases we want to
evaluate. In DBCA approach, for the previous sce-
nario that has 176 instances, we generate correspond-
ing 176 test cases. A test case will fail if the scenario’s
goal/objective fails.
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
240

Step 5. Run Simulation. After the test cases for
simulation are generated, we evaluate them in a sim-
ulation tool. If the objective defined is violated or
there is a potential crash, the simulation tool will fail
the test case. Based on these failures, we identify
the potential causes for collisions and undesired be-
haviors and discuss corresponding solutions (e.g, de-
sign modification, enhancement of functions) among
stakeholders including domain experts and engineers.
4 EMPIRICAL STUDY
To evaluate DBCA, we conducted an empirical study
using Metamoto (Metamoto, 2020), a cloud-based
simulation tool, with the focus on the following re-
search questions:
RQ1. How efficient is DBCA over exhaustive
simulation?
RQ2. Does reduction in the number test cases af-
fect DBCA’s ability to identify root causes of colli-
sions over exhaustive simulation?
4.1 Object of Analysis
To analyze DBCA, we considered a list of scenario
factors listed in Table B.3 in ISO 21448 (ISO/PAS,
2020) for defining ODD. The table contains values for
12 ODD elements such as climate (8 values), time of
the day (4 values), road shape (16 values), feature of
the road (8 values), condition of the road (6 values),
lighting (5 values), ego vehicle’s perception of condi-
tion (10 values), operation of the ego vehicle (14 val-
ues), surrounding vehicles (14 values), other road par-
ticipants (4 values), objects in the surroundings (16
values), and objects on the road-way (11 values). The
list of elements and their values is shown in Table 1.
It can be observed that many of the values in the table
can be further subdivided. For example, for ODD el-
ement “surrounding vehicle,” we have ”bicycle” as a
value. However, a bicycle itself can be moving along
the vehicle, crossing across the road, or coming in the
opposite direction but in a bike lane. However, we
only consider the values defined in Table B.3 in ISO
21448 to limit the scope of the analysis.
For test case generation, we focused on a vehicle
cut-in scenario (illustrated in Figure 3), where a lead
vehicle tries to cut-in to the path of the ego-vehicle,
i.e., an autonomous vehicle being analyzed. The ego-
vehicle we analyzed is a SAE level 2 system (Com-
mittee et al., 2014), which has a lane keeping assist
and a cruise control. We have also considered a city
street with passengers scenario for a SAE level 4 ve-
hicle (Committee et al., 2014) with cameras and a LI-
Figure 3: Example illustrations of cut-in cases possible
within the highway cut-in scenario.
DAR. However, for the level 4 system, the simulation
tool gave time-out errors for most of the test cases.
Upon analysis, we found that it was a simulation tool
issue. Hence, we do not discuss results of a SAE level
4 vehicle in this paper. Rather we focus on the level
2 system. Table 2 shows a list of parameters we used
for generating test cases for the level 2 system along
with their ranges, step size (how much increment we
have used between two values when generating test
case), and the total number of values we considered
for each of the parameter, respectively.
4.2 Variables
Independent Variable. The independent variable is
the type of technique we used to generate operating
environments and instances of scenarios.
We have one heuristic technique and one control
technique as follows.
Heuristic: The heuristic technique we used in our
study is our proposed DBCA approach, which uses
IPOG (Lei et al., 2007; Lei et al., 2008), a combinato-
rial algorithm to reduce the number of combinations
for operating environments as well as instances of a
scenario.
Control: The control technique used in our study
is the exhaustive technique where all possible com-
binations of values of ODD elements are considered
for operating environments, and all possible combina-
tions of property or parameter values are considered
for generating instances of a scenario.
Dependent Variables. The dependent variables for
RQ1 are time taken for creating operating environ-
ments and time taken for running instances of simula-
tion. and for RQ2 is the number of root causes result-
A Dependency-based Combinatorial Approach for Reducing Effort for Scenario-based Safety Analysis of Autonomous Vehicles
241

Table 1: ODD elements and their values from Table B.3 of ISO 21448 (ISO/PAS, 2020).
ODD element Values
Climate fine, cloudy, rainy, sleet, snow, hail, fog, wind
Time of the day early morning, daytime, evening, nighttime
Road shape straight, curve, downhill, uphill, banked road, step difference, uneven spot, Belgian
brick road, narrow road, wide road, median, manhole cover, tollgate, merging on the
roadway, branching, pothole
Feature of the road tunnel, underpass, bridges, skyways, cloverleaf, diamond, toll booth, gate
Condition of the road dry, wet, low µ path, crossover road, water trough, gravel road
Lighting direct sunlight, moon light, street lamp, backlight, twilight
Ego vehicle’s irregular disturbance by sensor, variation of sensor, sensor fogged up, dirtied sensor,
perception of vehicle posture, vehicle situation (e.g,. towing), real vehicle weight, distribution of
condition weight, tire, brake pad
Operation of the ego accelerating, decelerating, driving at constant speed, stopping of the vehicle, drive
vehicle at high speed, drive at low speed, making a turn, making a sudden traversing,
passing, right or left turn, construction zone detour, approaching intersection,
roundabout, crossing railroad track
Surrounding vehicles position of surrounding car, preceding vehicle makes sudden deceleration, preceding
vehicle makes deceleration, preceding vehicle makes acceleration, preceding vehicle
makes a sudden acceleration, interrupting vehicle, trailing vehicle in stop and go
traffic, vehicle to the right of ego vehicle going in same direction, vehicle to the
left of ego vehicle going in same direction, oncoming vehicle, high beam from
oncoming vehicle, a motor cycle passing by, bicycle, heavy interferences from other
vehicles
Other road pedestrian walking across, truck, three-wheeled motorcycle, peculiar vehicle
participants
Objects in sidewall, upside sign, side sign, pole, tunnel, multi-storey parking space, beneath a
surroundings viaduct, kerb, guardrail, pylon, vehicle stopping on the side of the road, animal
jumping out, railway crossing, construction site, marked crosswalk, water alongside
road
Objects on road-way reflectors, solid lines, dashed lines, cross walk, rumble strips, speed bumps,
informational (e.g., arrow, speed limit), none, interrupted, degraded lane markings,
multiple lane markings
ing in collision. Note that the number of root causes
resulting in collision is different from the number of
collisions detected. For example, let us consider an
autonomous vehicle that has eight collisions detected,
four due to incorrect sensor reading, and four due to
heavy rain. In this case, while the number of colli-
sions is eight, the number of root causes is only two.
4.3 Experimental Procedure
In our study, we utilized advanced combinatorial test-
ing for software (ACTS) tool (Yu et al., 2013), which
uses IPOG to generate combinations. For evaluating
operating environments, creating scenarios and test
cases, we used a proprietary simulation tool, which
runs simulations on a cloud.
To conduct our study, we began with the ODD el-
ements defined in Table 1. For the exhaustive tech-
nique, we calculated all possible combinations of
ODD elements that need to be considered for oper-
ating environments. In the meanwhile, we also iden-
tified the dependencies among 12 ODD elements. We
have considered both direct dependencies and indirect
dependencies to identify the ‘t’ value for generating t-
way combinations of ODD elements with ACTS tool.
For example, climate can affect the behaviors of sen-
sors in the ego vehicle thereby affecting its perception
of the condition, i.e., being unable to assess the cor-
rect situation which the ego vehicle encounters with
respect to its operating environment. We consider this
to be a direct dependency. Climate can also affect op-
eration of the ego vehicle because of its impact on the
ego vehicle’s perception of its condition with respect
to operating environment. Hence, we can consider
climate and the ego vehicle’s operation to have an in-
direct dependency. Based on the dependencies, we
decided to vary t-value from 2 to 4 to see how signif-
icantly the number of operating environments might
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
242

Table 2: Parameters considered for test cases.
Parameter Range Step size # of values
Road marking
deterioration 0–1 1 2
Road wetness 0–1 1 2
Road puddles 0–1 1 2
# of random
vehicles 0–20 5 5
Ego vehicle’s 500–
start distance 2000 100 16
Table 3: Fixed Parameters and their respective values.
Parameter Range Fixed value
Density of clouds 0–1 0.2
Amount of rain 0–1 0
Lead vehicle’s
collision avoidance 0–1 0
Lead vehicle’s
start distance 500–2000 910
Initial lead vehicle’s
start distance 500-2000 880
Ego vehicle’s
collision avoidance 0–1 0
differ.
Once the operating environments analysis is com-
plete, we performed scenario analysis. As mentioned
earlier in our study, we focus on analyzing instances
of a scenario in which a lead vehicle tries to cut into
the path of the level 2 ego vehicle. Thus, we consid-
ered a simulation environment that meets the needs
of the required operating environment. If the operat-
ing environment is not present then we should discuss
with simulation engineers and create a correspond-
ing environment to run simulation. The goal we de-
fined for the scenario being simulated is for the ego-
vehicle to reach a pre-defined location without colli-
sion. Since the simulation tool we used has a 800 jobs
limit, i.e., we cannot submit more than 800 test cases
at a time. Therefore, we fixed values of some param-
eters and varied values of other parameters. The fixed
parameters and their corresponding values are shown
in Table 3 and the range values for parameters are
found in Table 2 along with the step size and total
number of parameter values we used for each param-
eter. We chose larger step sizes because we believe
that once we identify a problematic range for the pa-
rameter, we can focus on the specific range and use
a smaller step size for the problematic range. This
paves a path for hierarchical analysis rather than per-
forming an exhaustive analysis. It can be observed
from Table 3 that the start distance of the lead vehicle
(the vehicle in front of the ego vehicle) is fixed to 910
and the start distance of the initial lead vehicle (the ve-
hicle which is in front of all vehicles in the scenario)
is fixed to 880. These values are chosen arbitrarily
to see how the vehicles will be initialized if the ego
vehicle’s position is set to be before the lead vehicle
in the test case. We chose both the lead vehicle’s and
the ego vehicle’s collision avoidance as zero due to
the following reasons: (1) we wanted to minimize the
simulation runs due to resource constraints and job
limits (the number of test cases that can be submitted
at once, which is 800 in our case). Since we already
have a randomized parameter “# of random vehicles”,
adding more randomness to the instances of scenarios
such as making collision avoidance as 0.5, where a
vehicle can collide another vehicle with a 50% prob-
ability (chosen randomly), will require more runs to
gain sufficient confidence in the results. (2) by mak-
ing collision avoidance of both ego vehicle and lead
vehicle zero, we can identify if the DBCA technique
can identify same collision causes as exhaustive tech-
nique even when vehicles are randomly initialized.
After fixing the parameter values, we generated
an exhaustive set of test cases for simulation using
the simulation tool. For the combinatorial analysis,
we created combinations of parameter values using
ACTS tool, and then created test cases in the simula-
tion tool. For parameter values, we chose a ‘p’ value
of 2 to generate p-way combinations. This is because
the only parameters that have a partial dependency are
road wetness and road puddles. We then ran these test
cases in the simulation tool to identify collision cases.
Note that, since we have some randomness present
for each test case due to a parameter “random num-
ber of vehicles”, we ran test suite for each approach
10 times. Once the results of test cases are collected,
we analyzed the failed test cases to identify causes of
collision and discussed with stakeholders about pos-
sible solutions and next steps. The results reported
are the average of results found over 10 iterations of
simulations.
4.4 Results
RQ1 Results. For RQ1, we analyzed the efficiency
of DBCA over exhaustive simulation. For 12 ODD
elements defined in Table 1, the total number of com-
binations that is required to be considered for creating
operating environments for each technique is shown
in Table 4. It can be observed from the table that
the exhaustive technique generated 169,554,739,200
combinations for operating environments; the num-
ber of combinations is significantly larger than that
of 2-way, 3-way or 4-way combinations generated
using DBCA. Each of the combinations represents
A Dependency-based Combinatorial Approach for Reducing Effort for Scenario-based Safety Analysis of Autonomous Vehicles
243
Table 4: Number of combinations generated for operating
environments using heuristic and control techniques.
Type Technique # of combinations
Heuristic DBCA 266 (2-way), 4032 (3-way),
55075 (4-way)
Control Exhaustive 169554739200
Table 5: Number of test cases generated (represented as # of
TC) using heuristic and control techniques and time taken
for running them in the cloud (represented as TT).
Type Technique # of TC TT
Heuristic DBCA 80 (2-way) 104 min
Control Exhaustive 640 225 min
a potential operating environment and an environ-
ment corresponding to this combination needs to
be checked for its presence in the simulation tool
manually. If no such environment is present in the
simulation tool, then the environment needs to be
created manually, which can take from a few minutes
to days depending on the complexity. Hence, we
can conclude that DBCA requires less effort over the
exhaustive technique.
Similarly, for the 5 parameter values in Table 2,
the number of test cases produced using DBCA and
the exhaustive approach and the approximate time
taken for each of their iteration using the simulation
tool are shown in Table 5. We can observe that DBCA
reduces the number of test cases by 87.5% and re-
duces the time required for running simulations in
cloud by ≈51% compared to the exhaustive approach.
RQ2 Results. For RQ2, we analyzed the number
of root causes for collision identified for DBCA and
the exhaustive approach, respectively. The results are
shown in the Table 6. While we have 63 collision
cases stemming from the results of 640 test cases for
the exhaustive approach, and only 10 collision cases
stemming from the results of 80 test cases for DBCA,
the number of root causes for collisions remained
same for both approaches. We found that the colli-
sion occurred irrespective of other parameter values
when the ego vehicle’s start distance is 800 and 1000.
This is because of lack of sufficient distance between
the lead vehicle and ego vehicle, there by resulting in
collision. When the ego vehicle’s starting distance is
900, then the collision is nearly missed, hence the test
cases are passed. Although the number of collision
cases reported for the exhaustive approach is 63, the
expected count is 80. The remaining 17 are reported
under the different category due to inherent problems
in the simulation tool, where a surrounding vehicle’s
hard braking infraction can result in a failure of a test
case, even if it is not related to an ego vehicle.
Table 6: Number of root causes for collisions found from
the test cases generated using heuristic and control tech-
niques.
Type Technique # of root causes
Heuristic DBCA 2
Control Exhaustive 2
4.5 Threats to Validity
First, the combinations generated by DBCA or the
exhaustive approach can have feasible or unfeasible
combinations. While this can be easily resolved by
adding constraints to the tools while generating com-
binations, it is essential to analyze both feasible and
unfeasible combinations as they might aid in uncov-
ering unknown safety issues. This helps in reducing
the unknown risks as required by ISO 21448 standard.
Second, random initialization of agents or vehicles in
a scenario can affect the results. To reduce the ef-
fect of randomization, we ran each test suite 10 times
using the simulation tool, and averaged the results.
Third, our results are based on Metamoto simulation
tool. So, they might not be generalized to other in-
dustrial tools or open source tools. Nevertheless, the
insights we provide based on the results can be use-
ful for other simulation tools that are intended for au-
tonomous vehicles.
5 DISCUSSION
From the results of our study, we found that DBCA
approach reduces the effort and time for analysis in
simulation tools over exhaustive approach. We also
found that we can identify the same number of root
causes for collisions as exhaustive approach using
DBCA, making it reliable to use for generating test
cases for simulation for autonomous vehicles.
Importance of ‘t’ and ’p’ Value in DBCA: While
combinatorial approach is found to be useful, it can
be effective only if we choose the right ‘t’ and ‘p’ val-
ues for generating combinations. For combinatorial
testing of software applications it is found that 2-way
interactions can expose approximately 62% to 97% of
the faults, 3-way interactions can expose 87% to 99%
of the faults, and 4-way interactions can expose 96%
to 100% of faults. However, whether such is the case
with safety-critical and complex systems such as au-
tonomous vehicle is yet to be verified.
To identify the right ‘t’ value used to generate t-
way combinations of ODD elements, it is essential to
perform a thorough analysis of dependencies among
ODD elements. Missing dependencies can result
in missing some important combinations thereby re-
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
244

sulting in overlooking some operating environments,
which can increase the chances of facing unknown
risks for autonomous vehicles. Similarly, ‘p’ value
used to generate p-way combinations of properties of
elements, i.e., parameters for simulation, must be cho-
sen based on dependencies among parameters. Miss-
ing dependencies among properties of the elements
considered for a scenario can result in missing critical
test cases, thereby overlooking safety issues. A poten-
tial future direction to explore in this area is to study
how percentages of collision causes that can be found
vary with increment in ‘t’ and ‘p’ values, and if the re-
quired ‘t’ an ‘p’ values are less than the ones defined
by identifying dependencies among ODD elements,
and properties/parameters of scenario respectively.
Insights on Simulation Tools for Autonomous
Vehicles: During the analysis of our results, we found
that it is important to ensure proper working of sim-
ulation tools before running simulations. We found
that often in the case of the Metamoto tool we used in
our study, even though we are focusing on identifying
collision of the ego vehicle, a randomly initialized
vehicle’s hard brake infraction also resulted in failure
of test cases. Moreover, the simulation tool does not
generate any metrics for ODD elements coverage
based on operating environments we define or sce-
nario coverage for each operating environment. Such
metrics should be considered as a part of simulation
tool.
A major finding we identified for the simulation
tool is that there is not effect of randomly initialized
vehicles on the results of our test cases. We analyzed
the results further to understand why we have such
an unexpected behavior among the results. We found
that simulation tools by default assume vehicles
when being initialized follows the traffic rules and
maintain minimal separation. However, this should
be left to the user, as a separate mechanism to specify
scenario rules or simulation rules, as assuming
vehicles always follow rules can result in overlooking
unknown scenarios, there by increasing unknown
risks for an autonomous vehicle.
Practical Implications for Industry: Using DBCA,
automotive engineers and safety analysts can iden-
tify the various operating environments that need to
be created as a part of simulation for analysis of
autonomous vehicle’s behaviors with less effort and
time. This also helps in simplifying the complexity
of hazard and risk assessments performed as a part of
FuSa and SOTIF analyses, where we need to consider
various possible scenarios a vehicle can be in. Sim-
ilarly DBCA can also reduce the effort and time re-
quired for running simulation by optimizing the num-
ber of test cases while simultaneously ensuring all de-
pendencies among the properties/parameters are sat-
isfied.
Limitations: Despite the advantages of DBCA ap-
proach, it suffers from limitations. First, the identi-
fication of dependencies among ODD elements and
among properties/parameters used for generating in-
stances of scenarios is a manual process. We can
address this limitation by automating the process us-
ing property relation tables, and generating inferences
from the tables. Another limitation is that we did not
define any systematic procedure for defining goals or
objectives for scenarios in this paper. We plan to ad-
dress this by suggesting various goals and objectives
that can be used for a scenario based on its ODD ele-
ments and properties by using a recommender system.
6 CONCLUSION AND FUTURE
WORK
In this paper, we proposed dependency-based com-
binatorial approach (DBCA) to reduce the effort for
identifying the various operating environments and
various instances for a scenario in an operating en-
vironment for autonomous vehicles. DBCA utilizes
the combinatorial algorithm IPOG (Lei et al., 2007;
Lei et al., 2008) to generate t-way combinations of
ODD elements to generate combinations that repre-
sent operating environments, and p-way combinations
of properties (or parameters) of elements chosen for a
scenario, where ‘t’ and ‘p’ values are defined by iden-
tifying dependencies among ODD elements and prop-
erties of elements, respectively. To evaluate DBCA
approach, we conducted an empirical study by con-
sidering ODD elements listed in Table B.3 of ISO
21448 (ISO/PAS, 2020) and a highway cut-in sce-
nario, and compared DBCA with the exhaustive tech-
nique, which generates all possible combinations of
values of ODD elements to generate operating envi-
ronments, and all possible combinations of values of
properties to generate instances for a scenario. We
found that DBCA reduces the time requires for run-
ning simulations significantly up to 51% without af-
fecting the number of collision causes identified.
As a part of future work, we plan to address
the limitations discussed in Section 5 and incorpo-
rate ethical assessment of safety into our approach
based on industrial standards such as ISO/AWI
39003 (ISO/AWi, 2021) We also plan to define
dependency-based coverage criteria that aid in an-
alyzing whether the engineers overlooked any of
the operating environments or test cases for scenar-
ios. We also plan to conduct a comprehensive study
A Dependency-based Combinatorial Approach for Reducing Effort for Scenario-based Safety Analysis of Autonomous Vehicles
245

for various scenarios using multiple simulation tools
(both industrial and open source) and study the effec-
tiveness of DBCA approach under a broader context.
REFERENCES
Akagi, Y., Kato, R., Kitajima, S., Antona-Makoshi, J.,
and Uchida, N. (2019). A risk-index based sampling
method to generate scenarios for the evaluation of au-
tomated driving vehicle safety*. In 2019 IEEE In-
telligent Transportation Systems Conference (ITSC),
pages 667–672.
Althoff, M. and Lutz, S. (2018). Automatic generation of
safety-critical test scenarios for collision avoidance of
road vehicles. In 2018 IEEE Intelligent Vehicles Sym-
posium (IV), pages 1326–1333.
BSI/PAS (2020). 1883:2020. Operational Design Do-
main (ODD) taxonomy for an automated driving sys-
tem (ADS) – Specification.
Cal
`
o, A., Arcaini, P., Ali, S., Hauer, F., and Ishikawa, F.
(2020). Generating avoidable collision scenarios for
testing autonomous driving systems. In 2020 IEEE
13th International Conference on Software Testing,
Validation and Verification (ICST), pages 375–386.
Committee, S. O.-R. A. V. S. et al. (2014). Taxonomy and
definitions for terms related to on-road motor vehicle
automated driving systems. SAE Standard J, 3016:1–
16.
Dosovitskiy, A., Ros, G., Codevilla, F., Lopez, A., and
Koltun, V. (2017). Carla: An open urban driving sim-
ulator. In Conference on Robot Learning, pages 1–16.
Duan, J., Gao, F., and He, Y. (2020). Test scenario genera-
tion and optimization technology for intelligent driv-
ing systems. IEEE Intelligent Transportation Systems
Magazine.
Fadaie, J. (2019). The state of modeling, simulation, and
data utilization within industry: An autonomous vehi-
cles perspective. CoRR, abs/1910.06075.
Fortellix (2020). Open M-SDL, Measurable Scenario De-
scription Language.
Gannous, A. and Andrews, A. (2019). Integrating safety
certification into model-based testing of safety-critical
systems. In 2019 IEEE 30th International Symposium
on Software Reliability Engineering (ISSRE), pages
250–260. IEEE.
ISO (2018). 26262. Road Vehicles – Functional Safety.
ISO/AWi (2021). 39003. Road Traffic Safety (RTS) — Guid-
ance on safety ethical considerations for autonomous
vehicles.
ISO/PAS (2020). 21448. Road vehicles - Safety of the in-
tended functionality.
Kalra, N. and Paddock, S. M. (2016). Driving to safety:
How many miles of driving would it take to demon-
strate autonomous vehicle reliability? Transportation
Research Part A: Policy and Practice, 94:182 – 193.
Koopman, P. and Wagner, M. (2016). Challenges in au-
tonomous vehicle testing and validation.
Kuhn, D. R., Kacker, R. N., and Lei, Y. (2010). Practi-
cal combinatorial testing. NIST special Publication,
800(142):142.
Lei, Y., Kacker, R., Kuhn, D. R., Okun, V., and Lawrence,
J. (2007). Ipog: A general strategy for t-way software
testing. In 14th Annual IEEE International Confer-
ence and Workshops on the Engineering of Computer-
Based Systems (ECBS’07), pages 549–556. IEEE.
Lei, Y., Kacker, R., Kuhn, D. R., Okun, V., and Lawrence,
J. (2008). Ipog/ipog-d: efficient test generation for
multi-way combinatorial testing. Software Testing,
Verification and Reliability, 18(3):125–148.
Li, Y., Tao, J., and Wotawa, F. (2020). Ontology-based
test generation for automated and autonomous driv-
ing functions. Information and Software Technology,
117:106200.
Metamoto (2020). Simulation as a service for autonomous
systems.
Mullins, G. E., Stankiewicz, P. G., Hawthorne, R. C., and
Gupta, S. K. (2018). Adaptive generation of challeng-
ing scenarios for testing and evaluation of autonomous
vehicles. Journal of Systems and Software, 137:197 –
215.
NHTSA (2018). Fatality Analysis and Reporting System
(FARS) Data Tables.
Nonnengart, A., Klusch, M., and M
¨
uller, C. (2019).
Crisgen: Constraint-based generation of critical sce-
narios for autonomous vehicles. In International Sym-
posium on Formal Methods, pages 233–248. Springer.
Rocklage, E., Kraft, H., Karatas, A., and Seewig, J. (2017).
Automated scenario generation for regression testing
of autonomous vehicles. In 2017 IEEE 20th Interna-
tional Conference on Intelligent Transportation Sys-
tems (ITSC), pages 476–483.
van Nes, N., B
¨
argman, J., Christoph, M., and van Schagen,
I. (2019). The potential of naturalistic driving for in-
depth understanding of driver behavior: Udrive results
and beyond. Safety Science, 119:11 – 20.
VTTI (2020a). Canadian NDS Data.
VTTI (2020b). SHRP2 NDS Data.
Wotawa, F. (2017). Testing autonomous and highly config-
urable systems: Challenges and feasible solutions. In
Automated Driving, pages 519–532. Springer.
Yu, L., Lei, Y., Kacker, R. N., and Kuhn, D. R. (2013). Acts:
A combinatorial test generation tool. In 2013 IEEE
Sixth International Conference on Software Testing,
Verification and Validation, pages 370–375. IEEE.
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
246
