
Dynamic Spectrum Access for RF-powered Ambient Backscatter
Cognitive Radio Networks
Ahmed Y. Zakariya
1,2
, Sherif I. Rabia
1,2
and Waheed K. Zahra
1,3
1
Institute of Basic and Applied Sciences, Egypt-Japan University of Science and Technology (E-JUST),
New Borg El-Arab City, Alexandria 21934, Egypt
2
Department of Engineering Mathematics and Physics, Faculty of Engineering, Alexandria University,
Alexandria 21544, Egypt
3
Department of Engineering Physics and Mathematics, Faculty of Engineering, Tanta University,
Tanta, 31111, Egypt
Keywords:
Cognitive Radio, Markov Decision Process, Reinforcement Learning, Ambient Backscatter.
Abstract:
In RF-powered backscatter cognitive radio networks, while the licensed channel is busy, the SU can utilize
the primary user signal either to backscatter his data or to harvest energy. When the licensed channel becomes
idle, the SU can use the harvested energy to actively transmit his data. However, it is crucial for the secondary
user to determine the optimal action to do under the dynamic behavior of the primary users. In this paper, we
formulate the decision problem as a Markov decision process in order to maximize the average throughput
of the secondary user under the assumption of unknown environment parameters. A reinforcement learning
algorithm is attributed to guide the secondary user in this decision process. Numerical results show that the
reinforcement learning approach succeeds in providing a good approximation of the optimal value. Moreover,
a comparison with the harvest-then-transmit and backscattering transmission modes is presented to investigate
the superiority of the hybrid transmission mode in different network cases.
1 INTRODUCTION
Cognitive radio (CR) networks provide an effective
solution for the issue of scarcity in spectrum bands
(Gouda et al., 2018) by allowing an unlicensed (sec-
ondary) user (SU) to opportunistically access the un-
used licensed bands of the licensed (primary) user
(PU) without making any harmful (Wang and Liu,
2010; Zakariya et al., 2019). At the beginning of each
time slot, the SUs have to sense the license channels
to check the existence of the PUs (Zakariya and Ra-
bia, 2016; Zuo et al., 2018). In such network, the SU
must evacuates the licensed channel when the PU ap-
pears in this channel (Fahim et al., 2018).
Energy efficiency is another important factor in
wireless communication which needs to be consid-
ered in CR networks (Zakariya et al., 2021). Re-
cently, radio frequency (RF) powered CR networks
have been attributed to provide an innovative solu-
tion for both the spectrum scarcity and the energy
limitation issues (Park et al., 2013). During the PU
transmission period, the SU can harvest energy from
the PU signal and store it until it is used in the ac-
tive transmission when the channel is free from the
PU signal. This transmission mode is called harvest-
then-transmit (HTT) mode (Van Huynh et al., 2019).
In (Lu et al., 2014; Niyato et al., 2014; Hoang et al.,
2014), the HTT mode is studied for a single SU op-
erating on multiple licensed channels. To maximize
the throughput of the SU, an optimal channel selec-
tion policy is obtained by formulating a Markov de-
cision process (MDP) problem. In (Lu et al., 2014),
the tradeoff between data transmission and RF energy
harvesting is studied assuming error-free sensing re-
sults. In (Niyato et al., 2014; Hoang et al., 2014),
sensing errors are considered. In (Niyato et al., 2014),
the model considered the known environment param-
eters scenario for both complete information and in-
complete information cases. In (Hoang et al., 2014),
in addition to the network cases considered in (Niy-
ato et al., 2014), the unknown environment parame-
ters scenario is considered. An online learning algo-
rithm is attributed to determine the optimal policy for
the SU.
The performance of the RF-powered CR net-
works strongly depends on the amount of the har-
vested energy. For channels with longer PU trans-
mission periods, the SU will have lesser opportu-
224
Zakariya, A., Rabia, S. and Zahra, W.
Dynamic Spectrum Access for RF-powered Ambient Backscatter Cognitive Radio Networks.
DOI: 10.5220/0010511502240230
In Proceedings of the 11th International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH 2021), pages 224-230
ISBN: 978-989-758-528-9
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

nities for his transmission. With the need to im-
prove the performance of the RF-powered CR net-
works, ambient backscatter technology is attributed
due to its ability of transmission in a busy chan-
nel with low power consumption (Van Huynh et al.,
2018a). Ambient backscattering (AB) is considered
as an energy-efficient communication mechanism that
enables communication devices to communicate by
modulating and reflecting the signals from ambient
RF sources (Liu et al., 2013; Zakariya et al., 2020a).
In CR networks, the signals of PUs represent these
ambient RF sources. Most importantly, this type of
communication does not cause any harmful interfer-
ence to the original RF signal (Van Huynh et al.,
2018a). In (Van Huynh et al., 2019; Van Huynh
et al., 2018b), a single SU working on a single channel
using a hybrid HTT and backscattering transmission
mode is assumed. In (Van Huynh et al., 2018b), only
the unknown environment parameters case is consid-
ered, and in order to maximize the throughput of the
SU a low-complexity online reinforcement learning
algorithm is designed. In (Van Huynh et al., 2019),
the known environment parameters network case is
also studied. Under the dynamic behavior of the pri-
mary signal, an MDP framework is proposed to obtain
the optimal policy that maximizes the throughput for
SU. In (Anh et al., 2019), multiple SUs operating on
a single channel in an unknown environment param-
eters network case is considered. Moreover, it is as-
sumed that a gateway is responsible for coordinating
and scheduling the backscattering time, the harvest-
ing time, and the transmission time among the SUs.
In order to maximize the total throughput, the authors
propose a deep reinforcement learning algorithm to
derive an optimal time scheduling policy for the gate-
way.
In (Van Huynh et al., 2019; Van Huynh et al.,
2018b; Anh et al., 2019), only a single channel net-
work case is considered. In the present work, we
assume that the CR network consists of multiple li-
censed channels from which the SU can harvest en-
ergy or utilize for data transmission. Moreover, the
incomplete information case (in which the SU does
not know the current state of the licensed channels)
with an unknown environment parameters scenario
is considered. In each time slot, the SU has to se-
lect an operating channel and based on the sensing
result, he has to choose between three possible oper-
ating modes: harvest energy, actively transmit data,
or backscatter transmission. To maximize the average
throughput for the SU, an MDP is attributed to repre-
sent and optimize the performance of such a dynamic
environment. An online reinforcement learning algo-
rithm is utilized to deal with the unknown environ-
ment parameters. Numerical results show that the per-
formance of the proposed hybrid mode with the rein-
forcement learning approach outperforms both HTT
mode and AB mode especially for high SU arrival rate
or small PU idle probability.
The rest of this paper is organized as follows. Sys-
tem model and our assumptions are presented in Sec-
tion II. Problem formulation and the online reinforce-
ment learning algorithm are presented in Section III.
Numerical results are shown in Section IV. Finally,
concluding remarks are given in Section V.
2 SYSTEM MODEL
We consider an RF-powered backscatter CR network
consisting of a single SU and N licensed channels
working on a time-slotted manner. During each
time slot, the SU receives a random batch of data
packets to be stored in his data queue which has
a finite capacity Q. The probability of receiving a
batch of size i is denoted by α
i
, i ∈ {0, 1, ..., R}. If the
available space in the data queue is not sufficient to
store the incoming batch, the whole batch is blocked.
The SU has also a finite energy storage of capacity
E to store the harvested energy. The SU knows
the licensed channels state (idle or busy) through
sensing. Let η
n
be the probability that channel n is
being idle. At the beginning of each time slot, the SU
has to select a channel to work on it. The selected
channel is sensed and based on the sensing result, the
SU has to perform a proper action. If the channel is
sensed to be idle, the SU actively transmits a batch
of R data packets which requires W energy units
(see Figure 1c). If the SU has less than R packets
or less than W energy units, then no transmission is
performed. Let δ
n
be the probability of successful
active transmission in channel n. On the other hand,
if the chosen channel is sensed to be busy, the SU has
to choose either to harvest E
h
energy units from the
PU signal or use this signal to backscatter D (D ≤ R)
packets from his data queue (see Figure 1a and Figure
1b, respectively). If the SU has less than D packets,
then no backscatter transmission is performed. The
probability of successful harvesting and successful
backscatter transmission are denoted by ν
n
and β
n
,
respectively.
The SU has to take a decision based on the sens-
ing result which suffers from both missed detection
and false alarm errors with probability m
n
and f
n
in channel n, respectively. In missed detection, the
channel is sensed to be idle while the actual channel
state is busy (Wang and Liu, 2010). On the other
hand, in the false alarm, the actual channel state is
Dynamic Spectrum Access for RF-powered Ambient Backscatter Cognitive Radio Networks
225

Figure 1: The different capabilities of the SU in the consid-
ered CR network.
Table 1: Environment parameters.
Symbol Description
η
n
The probability that channel n is idle.
ν
n
The probability of successful energy
harvesting from channel n.
δ
n
The probability of successful active
transmission in channel n.
β
n
The probability of successful backscattring
transmission in channel n.
m
n
The probability of missed detection in
channel n.
f
n
The probability of false alarm in channel n.
idle, while the SU senses it to be busy (Zakariya et al.,
2020b). The environment parameters are summarized
in Table 1. We consider the unknown environment
parameters case in which the SU doesn’t know the
value of these parameters in advance. Hence, we
propose using a reinforcement learning approach to
guide the SU decision process where the SU arrives
at the optimal decision through interacting with the
environment.
3 PROBLEM FORMULATION
In this section, to maximize the average throughput
of the SU, the problem is formulated first as an MDP
and then the applied online learning algorithm is
introduced.
3.1 State Space
The state space of the SU is defined as S = {(q, e) :
q ∈ {0, ..., Q}; e ∈ {0, ..., E}}, where q and e are the
number of data packets buffered in the data queue and
the number of energy units in the energy storage, re-
spectively. Hence, the state of the SU is defined as a
composite variable s = (q, e) ∈ S.
3.2 Action Space
At the beginning of each time slot, the SU has to se-
lect a channel to be sensed. If the channel is sensed to
be idle, the SU selects the active transmission mode.
On the other hand, if the channel is sensed to be busy,
the SU selects between the energy harvesting mode
and the backscattering transmission mode. This de-
cision process is summarized in Figure 2. Hence,
the action space of the SU can be defined as follows:
T = {(n, a)|n ∈ {1, 2, ..., N};a ∈ {h, b}}. Each action
consists of a pair where the first element n is the se-
lected channel and the second element a is the action
to be taken (h: harvest, b: backscatter) when the chan-
nel is sensed to be busy. If the selected channel n is
sensed to be idle, the SU will always perform active
transmission if he has the sufficient data and energy.
Figure 2: Typical decision process of the SU.
3.3 Immediate Reward
The SU receives an immediate reward (throughput)
when he successfully transmits his data either by
active or backscattering transmission. Let τ(s, c) be
the average throughput assuming the SU state s ∈ S
and the taken action c ∈ T . The expected value of
τ(s, c) can be expressed as follows:
SIMULTECH 2021 - 11th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
226
E[τ(s, c)] =
η
n
f
o
n
δ
n
R , e ≥ W, q ≥ R , c = (n, h)
η
o
n
m
o
n
β
n
D , D ≤ q < R , c = (n, b)
η
o
n
m
o
n
β
n
D , e < W, q ≥ R , c = (n, b)
η
n
f
o
n
δ
n
R+
η
o
n
m
o
n
β
n
D , e ≥ W, q ≥ R , c = (n, b)
0 , otherwise
,
(1)
where we use the notation z
o
to denote 1 − z
throughout this work.
3.4 Learning Algorithm
For the unknown environment parameters case, the
transition probability matrix for the MDP cannot be
derived. Hence, a reinforcement learning approach is
attributed to solve this issue. A parameterized pol-
icy is considered and a softmax action selection rule
is applied to find the SU decisions (Sigaud and Buf-
fet, 2013). In this policy, the probability of executing
action c at state s can be calculated as follows:
q(c|s;Θ) =
e
θ
s,c
∑
g∈T
e
θ
s,g
, (2)
where Θ = [θ
s,c
];s ∈ S, c ∈ T is the parameter vector
(also called preference vector) of the learning algo-
rithm which will be updated iteratively by interacting
with the environment to maximize the throughput of
the SU. The parameterized immediate throughput of
the SU in state s is τ
Θ
(s) =
∑
c∈T
q(c|s;Θ)τ(s, c). Fi-
nally, the average throughput of the SU can be param-
eterized as follows:
ℜ(Θ) = lim
M→∞
1
M
M
∑
k=1
E[τ
Θ
(s
k
)], (3)
where s
k
∈ S is the state at time step k and our goal is
to maximize ℜ(Θ) by updating the parameter vector
Θ. The OLGARB algorithm introduced in (Weaver
and Tao, 2001) is selected to be implemented in our
work and it is outlined in Algorithm 1.
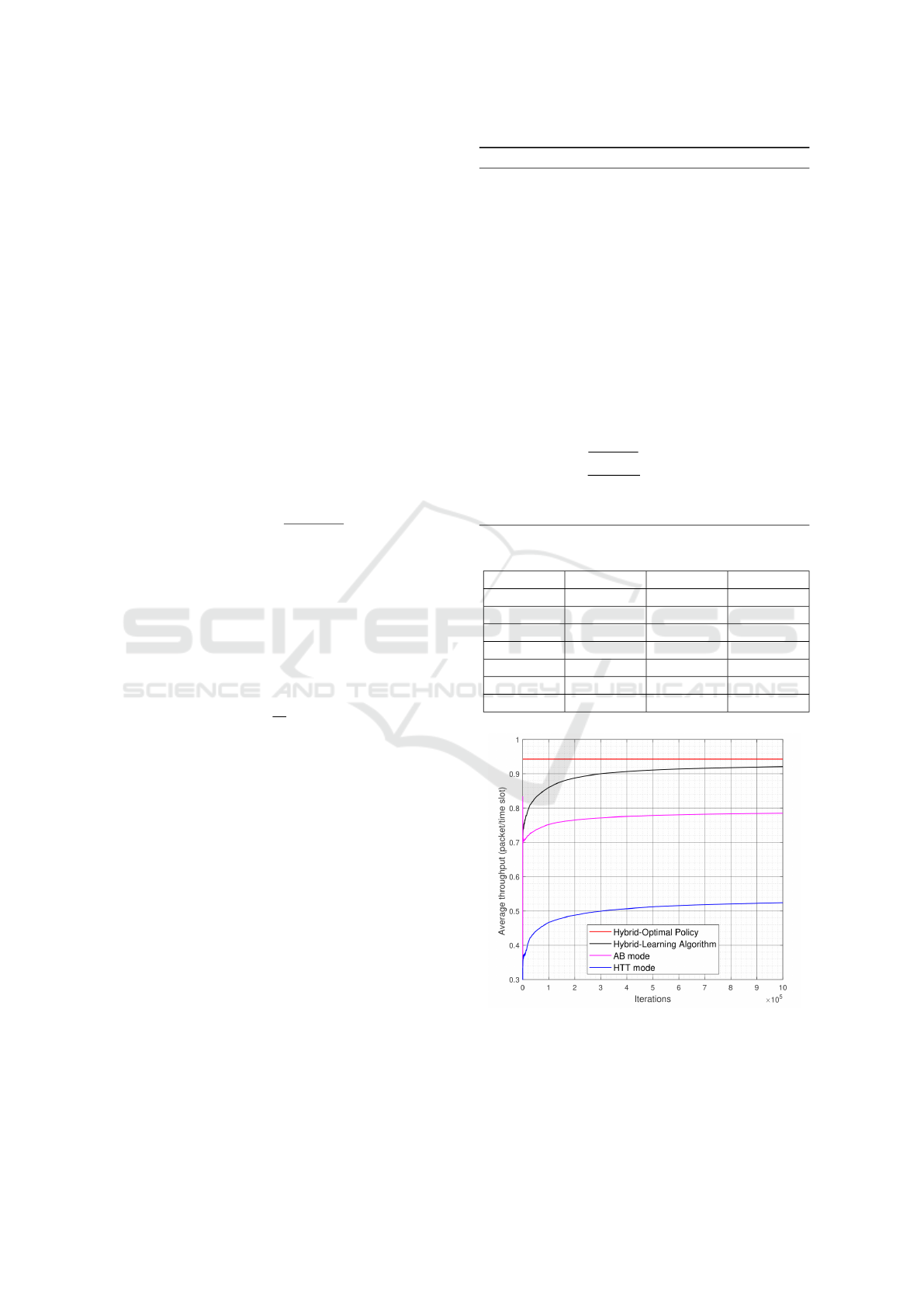
4 NUMERICAL RESULTS
A two-channel (N = 2) CR network is considered.
The assumed environment parameters are summa-
rized in Table 2. A batch of i ∈ {0, 1, 2} data packet
arrives in each time slot with probability α
i
. In Fig-
ure 3, the convergence of the learning algorithm is in-
vestigated. At the beginning of the learning process,
the throughput of the SU is fluctuating because the SU
is still in the starting process of adjusting the param-
eter Θ. As the number of iterations increases the per-
formance of the SU starts to stabilize and the through-
put approximately converges to 0.92 after 6 ×10
5
iter-
ations. This value is close to the optimal policy (0.94)
Algorithm 1: OLGARB Algorithm.
Input: Θ
0
, ε, γ Θ
0
: The initial value for the
preference vector.
ε: The learning step-size.
γ: The discount factor ∈ [0, 1].
Output: Θ Θ: The optimal preference vector.
1: z ← 0 Initialization for the eligibility trace
vector.
2: B ← 0 Initialization for the baseline (estimated
average reward).
3: Get initial state: s
1
Randomly select an initial
state
4: for t from 1 to M do
5: Get c
t
from q(.|s
t
;Θ)
6: Execute c
t
7: Get the new state s
t+1
and the reward τ(s
t
, c
t
)
8: B ← B +
τ(s
t
,c
t
)−B
t
9: z ← γz +
∇q(c
t
|s
t
;θ)
q(c
t
|s
t
;Θ)
10: Θ ← Θ + ε(τ(s
t
, c
t
) − B)z
11: end for
Table 2: Parameters setting.
Symbol Value Symbol Value
Q 10 E 10
W 1 R 2
β
1
, β
2
0.95 N 2
δ
1
, δ
2
0.95 E
h
1
ν
1
, ν
2
0.95 D 1
m
1
, m
2
0.01 ε 0.00005
f
1
, f
2
0.01 γ 0.99
Figure 3: The convergence of the learning algorithm.
obtained through value iteration algorithm.
In Figures 4 and 5, the performance of the pro-
posed hybrid transmission mode is investigated and
compared with HTT mode and AB mode in terms
Dynamic Spectrum Access for RF-powered Ambient Backscatter Cognitive Radio Networks
227

of throughput and blocking probability, respectively.
Figures 4a and 4b show the impact of the arrival rate
of the SU and the idle probability of the licensed chan-
nels on the achievable throughput for different poli-
cies. The arrival rate is simply calculated as
R
∑
i=0
iα
i
.
Moreover, we assume that α
1
= α
2
= α where α is
changed between 0.05 and 0.45 which allows the ar-
rival rate to vary between 0.15 to 1.35.
(a) The effect of the SU arrival rate for η
1
= 0.1 and η
2
=
0.3
(b) The effect of the idle channel probability for α = 0.5
Figure 4: Average throughput performance for different
transmission modes.
Figure 4a shows that for low arrival rate, all modes
almost give the same average throughput. That is
because, the amount of data units stored in the data
queue is relatively low. Hence, an inconsiderable op-
portunity is sufficient to transmit the existing data
packets. When the arrival rate increases, the differ-
ence in performance between the modes appears and
the proposed hybrid mode achieves a higher average
throughput. When the arrival rate is relatively high,
the system reaches to the saturated state and thus the
average throughput is steady. Figure 4b shows that
for low idle probability, the proposed hybrid mode
achieves significantly higher throughput compared to
the HTT policy. This is because, for low idle prob-
ability, the SU in the HTT mode almost has no op-
portunity to transmit his data. The performance of
the HTT mode enhances as the idle probability in-
creases because the opportunity of transmission in-
creases. On the other hand, as the idle probability
increases, the performance of the AB decreases be-
cause the availability of the RF signal of the PU de-
creases. For higher idle probability (greater than 0.5)
the performance of all modes starts to decrease be-
cause the availability of the RF signal of the PU which
is used for backscattering transmission and for energy
harvesting decreases. Moreover, Figures 4a, 4b show
that the learning algorithm always achieves perfor-
mance close to that of the optimal policy.
(a) The effect of the SU arrival rate for η
1
= 0.1 and η
2
=
0.3
(b) The effect of the idle channel probability for α = 0.5
Figure 5: Blocking probability performance for different
transmission modes.
SIMULTECH 2021 - 11th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
228

In Figure 5, the blocking probability is investi-
gated. From Figure 5a, as the arrival rate increases
the blocking probability for the arrival packets in-
creases. That is because, when the number of arriving
packets increases, the probability that the finite queue
size reaches its maximum value increases which in
turns increases the blocking probability. From Fig-
ure 5b, for low idle channel probabilities, the HTT
mode gives the highest blocking probability because
there is almost no opportunity to transmit any pack-
ets which consequently accumulate the data packets
in the queue till it reaches its maximum capacity and
blocks any further arrival packets. The blocking prob-
ability of the HTT mode decreases as the idle proba-
bility increases. However, when the idle probability is
greater than 0.5, the blocking probability of the HTT
mode starts to increase in a pattern similar to the other
modes.
5 CONCLUSIONS
In this paper, we applied a reinforcment learning ap-
proach to study a hybrid HTT/backscattering trans-
mission mode of an RF-powered CR network. The
average throughput and the blocking probability for
the SU are investigated for the incomplete informa-
tion channel case under the unknown environment pa-
rameters assumption. Numerical results showed that
the performance of the proposed hybrid mode is better
than that of using HTT and backscattering transmis-
sion modes especially for the case of heavy SU loads
or small PU idle probability. Finally, the proposed
model can be extended by considering the mode and
channel selection problem in a multi-channel RF-
powered cognitive radio networks composed of mul-
tiple SUs, where the optimization problem is more
challenging.
ACKNOWLEDGEMENTS
This work is supported by the National Telecom Reg-
ulatory Authority (NTRA) of Egypt under the project
entitled ”Security-Reliability Tradeoff in Spectrum
Sharing Networks with Energy Harvesting”. Ahmed
Y. Zakariya acknowledges also the support from the
Missions Sector of the Higher Education Ministry in
Egypt through Ph.D. scholarship.
REFERENCES
Anh, T. T., Luong, N. C., Niyato, D., Liang, Y.-C., and Kim,
D. I. (2019). Deep reinforcement learning for time
scheduling in RF-powered backscatter cognitive radio
networks. In IEEE Wireless Communications and Net-
working Conference (WCNC), pages 1–7.
Fahim, T. E., Zakariya, A. Y., and Rabia, S. I. (2018). A
novel hybrid priority discipline for multi-class sec-
ondary users in cognitive radio networks. Simulation
Modelling Practice and Theory, 84:69–82.
Gouda, A. E., Rabia, S. I., Zakariya, A. Y., and Omar, M.
(2018). Reactive spectrum handoff combined with
random target channel selection in cognitive radio net-
works with prioritized secondary users. Alexandria
engineering journal, 57(4):3219–3225.
Hoang, D. T., Niyato, D., Wang, P., and Kim, D. I. (2014).
Opportunistic channel access and RF energy harvest-
ing in cognitive radio networks. IEEE Journal on Se-
lected Areas in Communications, 32(11):2039–2052.
Liu, V., Parks, A., Talla, V., Gollakota, S., Wetherall, D.,
and Smith, J. R. (2013). Ambient backscatter: Wire-
less communication out of thin air. ACM SIGCOMM
Computer Communication Review, 43(4):39–50.
Lu, X., Wang, P., Niyato, D., and Hossain, E. (2014). Dy-
namic spectrum access in cognitive radio networks
with RF energy harvesting. IEEE Wireless Commu-
nications, 21(3):102–110.
Niyato, D., Wang, P., and Kim, D. I. (2014). Channel selec-
tion in cognitive radio networks with opportunistic RF
energy harvesting. In IEEE International Conference
on Communications (ICC), pages 1555–1560.
Park, S., Kim, H., and Hong, D. (2013). Cognitive radio
networks with energy harvesting. IEEE Transactions
on Wireless Communications, 12(3):1386–1397.
Sigaud, O. and Buffet, O. (2013). Markov decision pro-
cesses in artificial intelligence. John Wiley & Sons.
Van Huynh, N., Hoang, D. T., Lu, X., Niyato, D., Wang, P.,
and Kim, D. I. (2018a). Ambient backscatter commu-
nications: A contemporary survey. IEEE Communi-
cations Surveys & Tutorials, 20(4):2889–2922.
Van Huynh, N., Hoang, D. T., Nguyen, D. N., Dutkiewicz,
E., Niyato, D., and Wang, P. (2018b). Reinforce-
ment learning approach for RF-powered cognitive ra-
dio network with ambient backscatter. In IEEE Global
Communications Conference (GLOBECOM), pages
1–6.
Van Huynh, N., Hoang, D. T., Nguyen, D. N., Dutkiewicz,
E., Niyato, D., and Wang, P. (2019). Optimal and low-
complexity dynamic spectrum access for RF-powered
ambient backscatter system with online reinforcement
learning. IEEE Transactions on Communications,
67(8):5736–5752.
Wang, B. and Liu, K. R. (2010). Advances in cognitive
radio networks: A survey. IEEE Journal of Selected
Topics in Signal Processing, 5(1):5–23.
Weaver, L. and Tao, N. (2001). The optimal reward baseline
for gradient-based reinforcement learning. Proceed-
ings of the Seventeenth Conference on Uncertainty in
Artificial Intelligence, pages 538–545.
Dynamic Spectrum Access for RF-powered Ambient Backscatter Cognitive Radio Networks
229

Zakariya, A. Y. and Rabia, S. I. (2016). Analysis of an
interruption-based priority for multi-class secondary
users in cognitive radio networks. In 2016 IEEE
International Conference on Communications (ICC),
pages 1–6. IEEE.
Zakariya, A. Y., Rabia, S. I., and Abouelseoud, Y. (2019).
An optimized general target channel sequence for pri-
oritized cognitive radio networks. Computer Net-
works, 155:98–109.
Zakariya, A. Y., Rabia, S. I., and Zahra, W. (2020a). Anal-
ysis of a hybrid overlay/semi-passive backscattering
spectrum access in cognitive radio networks. In 2020
24th International Conference on Circuits, Systems,
Communications and Computers (CSCC), pages 252–
255. IEEE.
Zakariya, A. Y., Rabia, S. I., and Zahra, W. (2021). Optimal
decision making in multi-channel rf-powered cogni-
tive radio networks with ambient backscatter capabil-
ity. Computer Networks, page 107907.
Zakariya, A. Y., Tayel, A. F., Rabia, S. I., and Mansour,
A. (2020b). Modeling and analysis of cognitive radio
networks with different channel access capabilities of
secondary users. Simulation Modelling Practice and
Theory, 103:102096.
Zuo, P., Wang, X., Linghu, W., Sun, R., Peng, T., and Wang,
W. (2018). Prediction-based spectrum access opti-
mization in cognitive radio networks. In 2018 IEEE
29th Annual International Symposium on Personal,
Indoor and Mobile Radio Communications (PIMRC),
pages 1–7. IEEE.
SIMULTECH 2021 - 11th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
230
