
Fractional Order PV/T Model Design and Estimation using the
Fractional Observer
Amer Aziz
1
, Muwahida Liaquat
1
, Aamer Iqbal Bhatti
2
and Lahoucine Ouhsaine
3
1
National University of Sciences and Technology, Pakistan
2
Capital University of Science and Technology, Pakistan
3
Université de Lorraine Nancy, France
Keywords: Fractional-order System, PV/T Hybrid System, Observation, Fractional-HOSMO, Estimation, Disturbance,
Pseudo State.
Abstract: In the last decade, the demand for renewable energy sources has been increased due to factors which include
the rising fuel price and pollution, and consequently research on solar energy sources has been increased to
improve their efficiency. Photovoltaic Thermal (PV/T) system provides electrical power and heat
simultaneously, which is the promising technology. This research paper illustrates the simulation of the
comprehensive thermal-based mathematical model of the PV/T system with the joint estimation of the system
states: the temperature at each node, and disturbance using Fractional-High Order Sliding Mode Observer
(HOSMO). A fractional-order differential equation describes the PV/T system because of its characterization
in heterogeneous media and its multilayers structure. Fractional–HOSMO is a robust observer that can be
used further for the reduced-sensor control of PVT, which can be comparatively cheap. The parameter values
are derived from the thermal configuration of the layers and the properties of constituents.
1 INTRODUCTION
The photovoltaics (PV) system is affected by external
climatic conditions, so its electrical efficiency
decreases rapidly as its temperature increases. In recent
years, researchers have studied PV/T, which combines
both PV solar cells and thermal collectors to enhance
the overall efficiency and performance (Lobera, 2013;
Cui Young, Abd El-Samie and Alayi, 2020). The
impact and importance of heat transfer fluid like water,
air, nanofluids, and the other fluid types have been
described on the characterization and performance of
the PV/T system (Esfe, Eisapour, Salari and Alayi,
2020; Jiang Q, 2018). A water-based PV/T system is
commonly used in domestic because it is quite simple
and economical as compared to other types. It shows
improved performance and enhanced efficiency of the
thermal PV/T from the indoor and outdoor experiments
(Al-Waeli, 2018). A thermal-based model for the PV
module, integrated with a solar air collector, is
presented. The PV module temperature can be
minimized and controlled from changing the mass flow
rate of air to optimize the performance of the module
(Joshi, 2009). The thermal and electrical-based model
of PVT is designed to study the rational behaviour of
thermal and electrical parameters such as PV
temperature, fluid outlet temperature, and open-circuit
voltage in (Sarhaddi, 2010). A thermal model of
building and heat transfer in heterogeneous media has
designed using a fractional-order approach. Fractional
derivative order is an indicator of the building's heat
capacity (Skruch, 2013). In (Sierociuk, 2013), general
equations for heat process in heterogeneous media is
suggested by considering dispersed heat flux in the air
around the beam. A fractional-order partial differential
equation is derived for the sub or hyper diffusion
process in that particular media.
Fractional differentiation operator is the
generalized form of the simple integer differentiation
operator. It is crucial to model real-world phenomena
because of its hereditary properties and applications,
and many basic concepts of control field like
observability, controllability concepts and stability
condition has extended to general FOS (Monje, 2010;
Sabatier, 2012; Birs, Yıldız, Giusti and Acay, 2020).
A generalized thermal-based PV/T system model is
discussed in (Ouhsaine et al., 2017). The performance
of the fractional observer is explained for the
proposed fractional-order systems for pseudo-state
estimation (Belkhatir, 2017). Many authors suggest
Aziz, A., Liaquat, M., Bhatti, A. and Ouhsaine, L.
Fractional Order PV/T Model Design and Estimation using the Fractional Observer.
DOI: 10.5220/0010512006490655
In Proceedings of the 18th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2021), pages 649-655
ISBN: 978-989-758-522-7
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
649

the integer-based high order sliding mode observer
using Levant differentiator under unknown input
(Levant, 2007; Chu and Feng, 2020).
This paper presents the fractional-order thermal-
based model of the PVT system in state-space
representation. Irradiation factor and PV cell
parameters, which are very critical to the PV/T, are
also taken into account in the proposed system.
System states and disturbances are estimated by using
fractional order high order sliding mode observer
from the output temperature state of the PV/T system
under some disturbance. The impact of the
differentiator gain of the observer is explained in the
estimation of states and disturbance.
The structure of this research paper as follows:
Section 2 describes the main problem statement and a
thermal-based model of the PV/T model by
fractional-order equations in state-space
representation. Fractional HOSMO is presented for
the system under disturbance in section 3. Simulation
is performed to illustrate its performance under
disturbance for the pseudo-states and disturbance
estimation of the given system, and the effect of the
differentiator gain on estimation error in section 4.
The research paper is concluded and delivers the
outlines for future work in section 5.
2 PROBLEM STATEMENT
External Temperature, Irradiation, and fluid
temperature are the inputs which have been applied to
the PV/T system in Figure 1.
Figure 1: Disturbance & States estimation of the system.
The main objective is to estimate all the
temperature states of PV/T model design described by
the fractional-order differential equations because of
its characterization in heterogeneous media and its
multilayers structure.
Fractional- HOSMO is used to estimate all the
node temperatures of each layer and disturbance
using the PV cell temperature as output. Fractional
HOSMO uses differentiators to converge the
estimated temperature states on the actual
temperature states.
3 PVT MATHEMATICAL
MODELLING
3.1 System Description
PV/T converts sunlight into electricity from the solar
cell, and it captures the residual heat energy and
eliminates it from the PV module using the solar
thermal collector. Figure 2 elaborates on the essential
heat transfer principle and specific arrangements of
its components in the 2D scheme.
Figure 2: PV/T multilayer structure.
In the first layer, there is a glass cover that
provides more extended durability to the solar cells
and higher design flexibility compared to other
encapsulating technologies. Then, the second layer is
made of Ethylene-vinyl acetate (EVA), which is an
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
650

electrical insulator. The third layer is the PV cell,
which is the most crucial component to generate
electricity from solar irradiation. In the fourth layer, a
copper absorber is employed to absorb the extra heat
directly from PV cells. After these layers, a heat
exchanger flows under fixed small channels to extract
the excessive heat from the system. The use of base
heat transfer fluid (HTF) is essential to ensure better
cooling for the PV panel and heat gain for the thermal
system's output. Then this thermal energy can be
utilized for domestic use or heating purposes. In this
particular model, the heat transfer fluid is water. In
the last layer, there is a thermal insulator, which
prevents the heat flows through the sink.
3.2 Mathematical Modelling
Let assume the HTF (water) temperature is uniform.
Then, the following equation proposes the dynamic
behaviour issued from the thermal balances in each
layer.
Following equation describes the fractional based
heat diffusion (Ouhsaine et al., 2017):
𝐻
𝑡,𝜆
𝜅
𝑇𝑡,𝜆 (1)
𝜌
𝑐
𝑒
𝑄
𝑄
(2)
Where i is the index number for each layer, and
ρ,c,e correspond to density, heat capacity, and
thickness of manufacturing materials in each layer,
respectively
𝜌
𝑐
𝑒
𝑈
𝑇
𝑇
𝑈
𝑇
𝑇
(3)
Fractional state-space representation:
𝐷
𝑥
𝑡
𝐴
𝑥
𝑡
𝐵𝑢
𝑡
𝑦
𝑡
𝐶𝑥
𝑡
(4)
Where A is the state matrix, B is the input matrix,
C is the input matrix of the system.
System matrix (A) is
Input matrix (B) is
Where
()
[
]
1, 2, 3, , 7
x
tTTT T=…
is the
state vector of temperature at each node, and
()
[]
f
,,Tut TextG=
is the input vector, here
f
, & TG Text
are irradiations, external
temperature, and fluid temperatures respectively.
4 FRACTIONAL HIGH ORDER
SLIDING MODE OBSERVER
Many sensors are required for the measurement of
states, so they are costly and complicated. System
state measurements may be too noisy due to the
presence of disturbance. Therefore, to solve this
problem, system states are estimated by the help of
Fractional HOSMO. The advantage of this observer
is that it also estimates the disturbance added in the
system if it is bounded.
Following assumptions should be satisfied by the
system (Belkhatir, 2017):
• Assumption 1: The system should be
completely observable
• Assumption 2: The relative degree of the
system concerning unknown input should be
n. It shows that the system is strongly
observable.
• Assumption 3: The unknown input and its
derivative should be bounded a function of
Lebesgue measurable.
The following equations give fractional HOSMO:
𝐷
𝑧
𝑡
𝐴𝑧
𝑡
𝐵𝑢
𝑡
𝐿𝑦𝐶𝑧
𝑡
(5)
Fractional Order PV/T Model Design and Estimation using the Fractional Observer
651

1
1
1
11 2 1 1 1
1
1
223 2 1 2 1
11 1
()
()
( )
n
n
n
tn
n
n
n
tn
tn n n
Dvw v M v yCz signv yCz
Dv w v M v w signv w
Dv Msignv w
α
α
α
λ
λ
λ
Δ
+
+
+
−
Δ
++
==− −+ −+
==− − −
=− −
(6)
𝑥
𝑡
𝑧𝑡𝐾𝑣
𝑡
(7)
𝜉
𝑡
1
𝑑
𝑣
𝑎
𝑣
⋯𝑎
𝑣
(8)
Where z∈ℝ
and L∈ℝ is the vector and gain of
Luenberger observer (5) respectively, v∈ℝ
and
M is the vector and gain of differentiator (6)
respectively where the sliding surface is defined,
constant 𝑑𝐶
𝐴𝐿𝐶
, x is pseudo-state
estimation vector and K is a correction gain which is
inverse of observability matrix in (7), a
∈ℝ are
coefficients of 𝐾
𝐴 𝐿𝐶𝐾 in the estimation of
disturbance 𝜁𝑡.
5 SIMULATION
Table 1: The values of important parameters.
The simulation illustrates the performance of the
observer for the given PV/T system. There are two
cases:
I. Disturbance free
II. Disturbed system
Now after putting the values of parameters as
given in table 1, system matrices are as follow:
𝐴
⎣
⎢
⎢
⎢
⎢
⎢
⎡
1.19 0.180 0 0 0 0 0
0.41 0.61 0.24 0 0 0 0
0 0.79 1000.5 1001 0 0 0
0 0 202 298 96 0 0
0 0 0 56.1 56.7 0.14 0
0 0 0 0 2.36 2.30 0.01
0 0 0 0 0 1 20.70
⎦
⎥
⎥
⎥
⎥
⎥
⎤
The parameter values are taken from the manual
of the apparatus (PVT system) in the laboratory of
National University of Sciences and Technology
Islamabad, Pakistan.
The output matrix will be
[0 0 0 0 0 0 1]C =
The following system is observable. The system
is at rest and taking initial condition zero. Inputs is
[30,900,18]. The different values of input can be
taken according to the model.
5.1 Case 1: Disturbance Free
Differentiator gain is M=5, and the gain of the linear
observer part is 𝐿 500 100 15 20 5 10 5
Figure 3: States estimation error without disturbance.
Figure 3 shows that, in the absence of unknown
input or disturbance, HOSMO will simultaneously
ignore modeling ambiguity and easily estimate the
system states.
5.2 Case 2: Under Disturbance
In this case, the system has perturbed by
incorporating the disturbance in the first state of the
system. The observer should estimate it accurately so
that some suitable controller can eliminate its effect
using this disturbance estimation. The disturbance
added in the system is 𝜁𝑡 10sin 2𝜋𝑡 .
Differentiator gain is M=25.
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
652
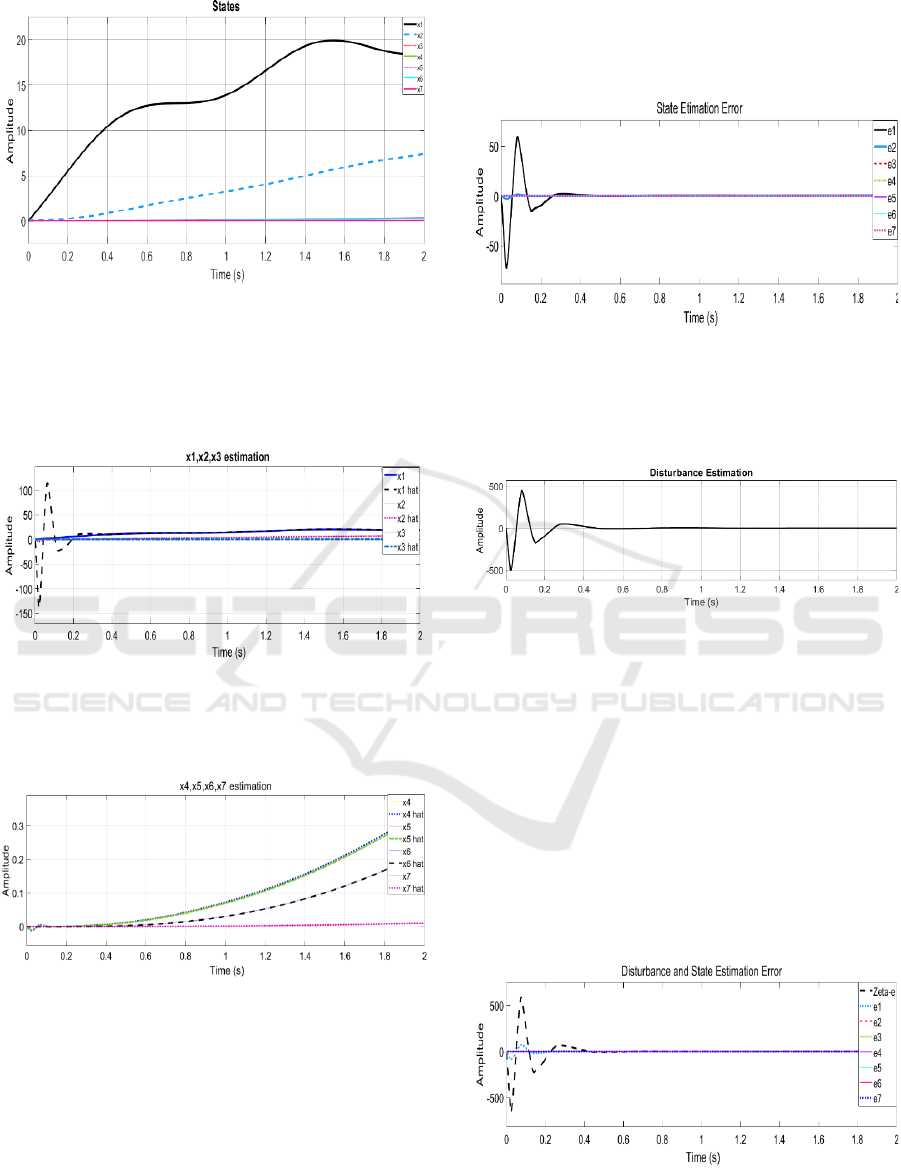
Figure 4: System states under the disturbance.
Figure 4 shows the effect of the disturbance in
which systems states have been disturbed. System
state showing the nonlinear behaviour due to
nonlinear disturbance.
Figure 5: States 𝑥
, 𝑥
, 𝑥
and their estimated states.
Figure 5 shows that the estimated states of (T1-
T3) converging on the system states at 0.25 second.
Figure 6: States 𝑥
, 𝑥
, 𝑥
, 𝑥
and their estimated states.
Figure 6 shows that the estimated states of (T4-
T7) converging on the system states at 0.15 second.
It is shown that observer is still estimating the
status smoothly under the disturbance because all the
estimated states of the observer are converging to the
systems states smoothly within 0.25 sec in Figures 5
and 6.
5.2.1 Estimation Error for Observer
The estimation error is the measure of the
performance of the given observer.
Figure 7: The estimation error for all the states.
Figure 7 shows that the estimation error for all
states is zero when all the estimated states converge
to the system states within 0.25 second.
Figure 8: The estimation error for disturbance.
Figure 8 shows that the estimation error for
disturbance is zero when the estimation of
disturbance is converging to the actual disturbance
within 0.3 second.
It is shown in figures 7 and 8 that states and
disturbance estimation error is high in the start, but it
becomes zero at 0.25 sec when estimated states
converge on system states. Therefore, these graphs
are evidence of the excellent performance of the
given observer.
5.2.2 Effect of the Gain M
Figure 9: State-estimation errors for M=50.
Fractional Order PV/T Model Design and Estimation using the Fractional Observer
653

It illustrates the effect of the differentiator gain M on
the convergence and amplitude of error. There exists
a compromise between convergence and overshoot of
estimation error.
Figure 10: State-estimation errors for M=200.
The overshoot of estimation error is increasing
from 600 to 1000 as gain is increasing from 50 to 200.
While the convergence in the second scenario will be
better than in the first scenario
Figures 9 and 10 elaborate that there exists a
trade-off between estimation convergence and the
overshoot of estimation error because, when M gain
is increased, the overshoot of the estimation error will
also increase.
6 CONCLUSIONS
This paper presents the thermal-based modelling of
the multilayer structure PVT system by a fractional-
order derivative equation and then its state-space
representation. Fractional-HOSMO is implemented
to estimate the disturbance and system states under
disturbance. Simulation is performed to test the
performance of the given observer for both cases:
disturbance-free and disturbed systems. It describes
the effect of the gain on the performance of the
observer. It emphasizes on the hardware
implementation of this system and extends it to the
multiple inputs and multiple outputs system for future
work. It will be interesting to make further
suggestions for improvements in the system.
REFERENCES
Lobera, D. T., & Valkealahti, S. (2013). Dynamic thermal
model of solar PV systems under varying climatic
conditions. Solar energy, 93, 183-194.
Cui, Y., Yao, H., Zhang, J., Xian, K., Zhang, T., Hong, L.,
... & Hou, J. (2020). Single ‐ junction organic
photovoltaic cells with approaching 18% efficiency.
Advanced Materials, 32(19), 1908205.
Abd El-Samie, M. M., Ju, X., Zhang, Z., Adam, S. A., Pan,
X., & Xu, C. (2020). Three-dimensional numerical
investigation of a hybrid low concentrated
photovoltaic/thermal system. Energy, 190, 116436.
Alayi, R., Kasaeian, A., & Atabi, F. (2020). Optical
modeling and optimization of parabolic trough
concentration photovoltaic/thermal system.
Environmental Progress & Sustainable Energy, 39(2),
e13303.
Esfe, M. H., Kamyab, M. H., & Valadkhani, M. (2020).
Application of nanofluids and fluids in photovoltaic
thermal system: An updated review. Solar Energy, 199,
796-818.
Eisapour, M., Eisapour, A. H., Hosseini, M. J., &
Talebizadehsardari, P. (2020). Exergy and energy
analysis of wavy tubes photovoltaic-thermal systems
using microencapsulated PCM nano-slurry coolant
fluid. Applied Energy, 266, 114849.
Salari, A., Kazemian, A., Ma, T., Hakkaki-Fard, A., &
Peng, J. (2020). Nanofluid based photovoltaic thermal
systems integrated with phase change materials:
numerical simulation and thermodynamic analysis.
Energy Conversion and Management, 205, 112384.
Alayi, R., Kasaeian, A., & Atabi, F. (2020). Optical
modeling and optimization of parabolic trough
concentration photovoltaic/thermal system.
Environmental Progress & Sustainable Energy, 39(2),
e13303.
Yu, B., Jiang, Q., He, W., Liu, S., Zhou, F., Ji, J., ... & Chen,
H. (2018). Performance study on a novel hybrid solar
gradient utilization system for combined photocatalytic
oxidation technology and photovoltaic/thermal
technology. Applied Energy, 215, 699-716.
Al-Waeli, A. H., Chaichan, M. T., Kazem, H. A., Sopian,
K., Ibrahim, A., Mat, S., & Ruslan, M. H. (2018).
Comparison study of indoor/outdoor experiments of a
photovoltaic thermal PV/T system containing SiC
nanofluid as a coolant. Energy, 151, 33-44.
Joshi, A. S., Tiwari, A., Tiwari, G. N., Dincer, I., & Reddy,
B. V. (2009). Performance evaluation of a hybrid
photovoltaic thermal (PV/T)(glass-to-glass) system.
International Journal of Thermal Sciences, 48(1), 154-
164.
Sarhaddi, F., Farahat, S., Ajam, H., Behzadmehr, A. M. I.
N., & Adeli, M. M. (2010). An improved thermal and
electrical model for a solar photovoltaic thermal (PV/T)
air collector. Applied energy, 87(7), 2328-2339.
Skruch, P. (2013). A general fractional-order thermal model
for buildings and its properties. In Advances in the
Theory and Applications of Non-integer Order Systems
(pp. 213-220). Springer, Heidelberg.
Sierociuk, D., Dzieliński, A., Sarwas, G., Petras, I.,
Podlubny, I., & Skovranek, T. (2013). Modelling heat
transfer in heterogeneous media using fractional
calculus. Philosophical Transactions of the Royal
Society A: Mathematical, Physical and Engineering
Sciences, 371(1990), 20120146.
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
654

Monje, C. A., Chen, Y., Vinagre, B. M., Xue, D., & Feliu-
Batlle, V. (2010). Fractional-order systems and
controls: fundamentals and applications. Springer
Science & Business Media.
Sabatier, J., Farges, C., Merveillaut, M., & Feneteau, L.
(2012). On observability and pseudo state estimation of
fractional order systems. European journal of control,
18(3), 260-271.
Birs, I., Nascu, I., Ionescu, C., & Muresan, C. (2020).
Event-based fractional order control. Journal of
Advanced Research.
Yıldız, T. A., Jajarmi, A., Yıldız, B., & Baleanu, D. (2020).
New aspects of time fractional optimal control
problems within operators with nonsingular kernel.
Discrete & Continuous Dynamical Systems-S, 13(3),
407.
Giusti, A. (2020). General fractional calculus and
Prabhakar’s theory. Communications in Nonlinear
Science and Numerical Simulation, 83, 105114.
Acay, B., Bas, E., & Abdeljawad, T. (2020). Non-local
fractional calculus from different viewpoint generated
by truncated M-derivative. Journal of Computational
and Applied Mathematics, 366, 112410.
Ouhsaine, L., Boukal, Y., El Ganaoui, M., Darouach, M.,
Zasadzinski, M., Mimet, A., & Radhy, N. E. (2017). A
General fractional-order heat transfer model for
Photovoltaic/Thermal hybrid systems and its observer
design. Energy Procedia, 139, 49-54.
Belkhatir, Z., & Laleg-Kirati, T. M. (2017). High-order
sliding mode observer for fractional commensurate
linear systems with unknown input. Automatica, 82,
209-217.
Levant, A. (2003). Higher-order sliding modes,
differentiation and output-feedback control.
International journal of Control, 76(9-10), 924-941.
Fridman, L., Levant, A., & Davila, J. (2007). Observation
of linear systems with unknown inputs via high-order
sliding-modes. International Journal of systems
science, 38(10), 773-791.
Ferreira de Loza, A., Fridman, L., Aguilar, L. T., & Iriarte,
R. (2019). High‐order sliding‐mode observer–based
input ‐ output linearization. International Journal of
Robust and Nonlinear Control, 29(10), 3183-3199.
Yin, X., Wang, B., Liu, L., & Wang, Y. (2019). Disturbance
observer-based gain adaptation high-order sliding mode
control of hypersonic vehicles. Aerospace Science and
Technology, 89, 19-30.
Chu, Z., Meng, F., Zhu, D., & Luo, C. (2020). Fault
reconstruction using a terminal sliding mode observer
for a class of second-order MIMO uncertain nonlinear
systems. ISA transactions, 97, 67-75.
Feng, Z., Liang, W., Ling, J., Xiao, X., Tan, K. K., & Lee,
T. H. (2020). Integral terminal sliding-mode-based
adaptive integral backstepping control for precision
motion of a piezoelectric ultrasonic motor. Mechanical
Systems and Signal Processing, 144, 106856.
Fractional Order PV/T Model Design and Estimation using the Fractional Observer
655
