Over Two Years of Challenging Environmental Conditions for
Localization: The IPLT Dataset
Youssef Bouaziz
1,2 a
, Eric Royer
1
, Guillaume Bresson
2
and Michel Dhome
1
1
Université Clermont Auvergne, CNRS, SIGMA Clermont, Institut Pascal, 63000 Clermont-Ferrand, France
2
Institut VEDECOM, 23 bis allée des Marronniers, 78000 Versailles, France
Keywords:
Visual-based Navigation, Computer Vision for Transportation, Long-term SLAM.
Abstract:
This paper presents a new challenging dataset for autonomous driving applications: Institut Pascal Long-Term
— IPLT — Dataset which was collected over two years and it contains, at the moment, 127 sequences and it
still growing. This dataset has been captured in a parking lot where our experimental vehicle has followed the
same path with slight lateral and angular deviations while we made sure to incorporate various environmental
conditions caused by luminance, weather, seasonal changes.
1 INTRODUCTION
Autonomous driving applications are very critical and
should be taken with absolute caution before deploy-
ment on public roads. Therefore, real-world data are
needed in development, testing and validation phases.
This paper presents a new dataset called IPLT (In-
stitut Pascal Long-Term) dataset which mainly ad-
dresses localization under challenging conditions is-
sues (snow, rain, change of season. . . ).
Before explaining in details the composition of
our dataset, it is important to explore the structure
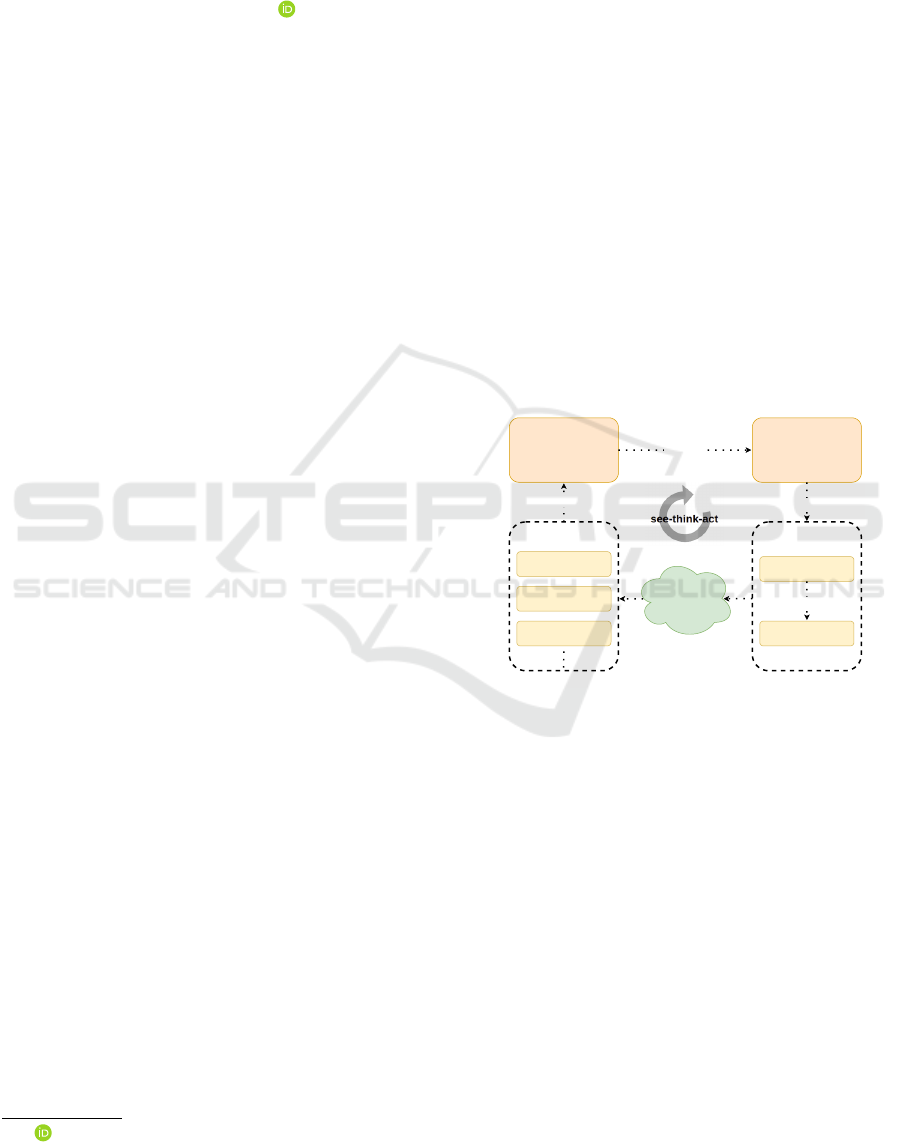
of an autonomous robot first. Figure 1 represents the
operating mechanism of a general autonomous navi-
gation platform in See-Think-Act cycle as explained
in (Siegwart et al., 2011).
According to Figure 1, we can identify the
four main modules interfering in this See-Think-Act
mechanism:
• Perception of the environment and the state of the
robot thanks to the different equipped sensors.
• Robot localization and mapping in the environ-
ment.
• Obstacle avoidance and trajectory planning.
• Processing and executing mission orders.
In our case, we are interested only in the first two
modules which are directly dependant to the dataset
presented in this paper. Our experimental vehicle ac-
quires external environmental data through different
a
https://orcid.org/0000-0003-3257-6859
Localization and
Mapping
Cameras
Lidars
GPS
Sensors
Sensory data
Cognition
Path planning
Position
+
Global map
Motion control
Path
Path execution
Acting
Actuator commands
Real world
environment
Figure 1: Autonomous driving platform represented in See-
Think-Act Cycle (Siegwart et al., 2011).
equipped sensors (camera images, laser scans, GPS
data, odometry data,...). Then, these sensory infor-
mation are received by the localization and mapping
(SLAM) module to allow the vehicle to interpret the
environment so it can localize and update the map.
In our dataset, we repeatedly traverse the same
parking lot, therefore, we managed to record many
dynamic elements such as weather and lighting
changes, seasonal changes, parking lot state changes
(parked cars changes, empty parking lot, full parking
lot, . . . ), moving cars, moving pedestrians, . . . . In
Figure 2, we present an overview of images showing
some types of environmental conditions included in
our dataset.
Our dataset is composed of 127 sequences in total
and they are distributed as follows:
Bouaziz, Y., Royer, E., Bresson, G. and Dhome, M.
Over Two Years of Challenging Environmental Conditions for Localization: The IPLT Dataset.
DOI: 10.5220/0010518303830387
In Proceedings of the 18th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2021), pages 383-387
ISBN: 978-989-758-522-7
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
383

(a)
2018-10-19-10-54-31
(b)
2018-10-22-19-40-27
(c)
2018-10-26-07-31-09
(d)
2018-10-26-09-11-01
(e)
2018-12-11-17-33-30
(f)
2018-12-13-10-36-57
(g)
2019-01-23-10-33-15
(h)
2019-01-23-16-05-30
(i)
2019-02-04-10-58-40
(j)
2019-10-01-16-54-55
(k)
2019-10-22-15-01-25
(l)
2019-12-05-16-43-56
(m)
2020-01-15-11-13-20
(n)
2020-01-31-16-07-34
(o)
2020-02-05-18-37-10
Figure 2: An overview of images recorded with the front camera for some sequences of our dataset. For each sequence we
are indicating the acquisition date and symbolizing the environmental condition by a small icon. Please refer to Table 1 for
more details about the designation of these condition icons.
Table 1: Designation of condition icons.
Icon Designation
Day & sunny condition
Dusk condition
Night condition
Cloudy weather
Rainy weather
Fog condition
Snow condition
• 22 sequences with sunny condition
• 43 sequences with cloudy weather
• 19 sequences with rainy weather
• 19 sequences with dusk condition
• 14 sequences with night condition
• 4 sequences with fog condition
• 5 sequences with snow condition
• 1 long sequence (2019-12-05-16-43-56.bag)
recorded over one hour and 10 minutes with mul-
tiple loops in the parking lot starting from 16:44
until 17:54 and it incorporates day, dusk and night
conditions.
We made our dataset public online in the hope
of facilitating evaluations for researchers focusing on
long-term autonomous navigation in dynamic envi-
ronments. Our dataset can be downloaded through
the link: http://iplt.ip.uca.fr/datasets/. Please enter the
following username/password for a read-only access
to our ftp server: ipltuser/iplt_ro.
The remainder of this paper is outlined as follows.
Section 2 presents references of some related datasets,
Section 3 provides information about the IPLT dataset
and the equipment of our experimental shuttle which
has been used to record it and Section 4 concludes the
paper.
2 RELATED WORK
Intensive work on SLAM algorithms has produced a
large number of related datasets such as Ford Cam-
pus Dataset (Pandey et al., 2011), Málaga Urban
Dataset (Blanco-Claraco et al., 2014), Waymo Open
Dataset (Sun et al., 2020),. . . . Some of these datasets
were recorded in static environments with very lit-
tle environmental changes, while some others are not
revisiting a same location when recording different
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
384

sequences. KiTTi (Geiger et al., 2013) is widely
used dataset in SLAM applications, unfortunately,
this dataset is not incorporating many environmental
conditions since it was collected over one week (from
2011-09-26 to 2011-10-03). Later, a new dataset with
a novel labeling scheme and data for 2D and 3D se-
mantic segmentation was proposed in KiTTi 360 (Xie
et al., 2016). However, this dataset consists of only
11 individual sequences and there is little overlap in
trajectories between them.
Applications destined for autonomous driving and
aiming for long-term localization uses must be eval-
uated on real-life scenarios where environment is
changing over time. The VPRiCE challenge (Suen-
derhauf, 2015) is a dataset that offers some challeng-
ing cases for localization. Unfortunately, this dataset
is offering only few sequences of some places that
were revisited twice on different times. Similarly, the
CMU Seasons dataset (Bansal et al., 2014) was ac-
quired in urban and suburban environments totaling
over 8.5 km of travel and contains 7,159 reference
images and 75,335 query images acquired in differ-
ent seasons. Sattler et al. (Sattler et al., 2018) have
also presented a challenging dataset, called Aachen
Day-Night, which incorporates 4,328 daytime images
and 98 night-time queries. The NCLT (Carlevaris-
Bianco et al., 2015), Oxford RobotCar (Maddern
et al., 2017) and UTBM RobotCar (Yan et al., 2020)
datasets are three widely used datasets for long-term
tracking applications as they include different envi-
ronmental conditions. The UTBM RobotCar dataset
is including only few sequences (11 sequences in to-
tal) while in the two others, the traversed path is var-
ied on each recording session.
In addition to environmental conditions, we are
also interested in evaluating the effect of the lat-
eral and angular deviation between sequences on the
localization performance. However, the previously
mentioned datasets do not provide sequences with
such characteristics. This is the main reason that led
us to record our own dataset and make it available to
the community. Our dataset was used in our previous
work (Bouaziz et al., 2021) to evaluate the impact of
environmental changes and lateral and angular devia-
tions on the localization performance.
3 IPLT DATASET
Our dataset contains currently 127 sequences col-
lected over two years. In all the sequences, the ve-
hicle has followed the same path, while in some of
them, we made some slight lateral and angular devi-
ations as specified in the Figure 3. All our sequences
were recorded in the same direction and each one of
them is about 200 m length.
Figure 3: Example of sequences recorded in a parking lot.
As specified in Figure 3, all the sequences in our
dataset are forming loops in the parking lot. This
makes from our dataset a very good asset for loop
closure applications. All the sequences in our dataset
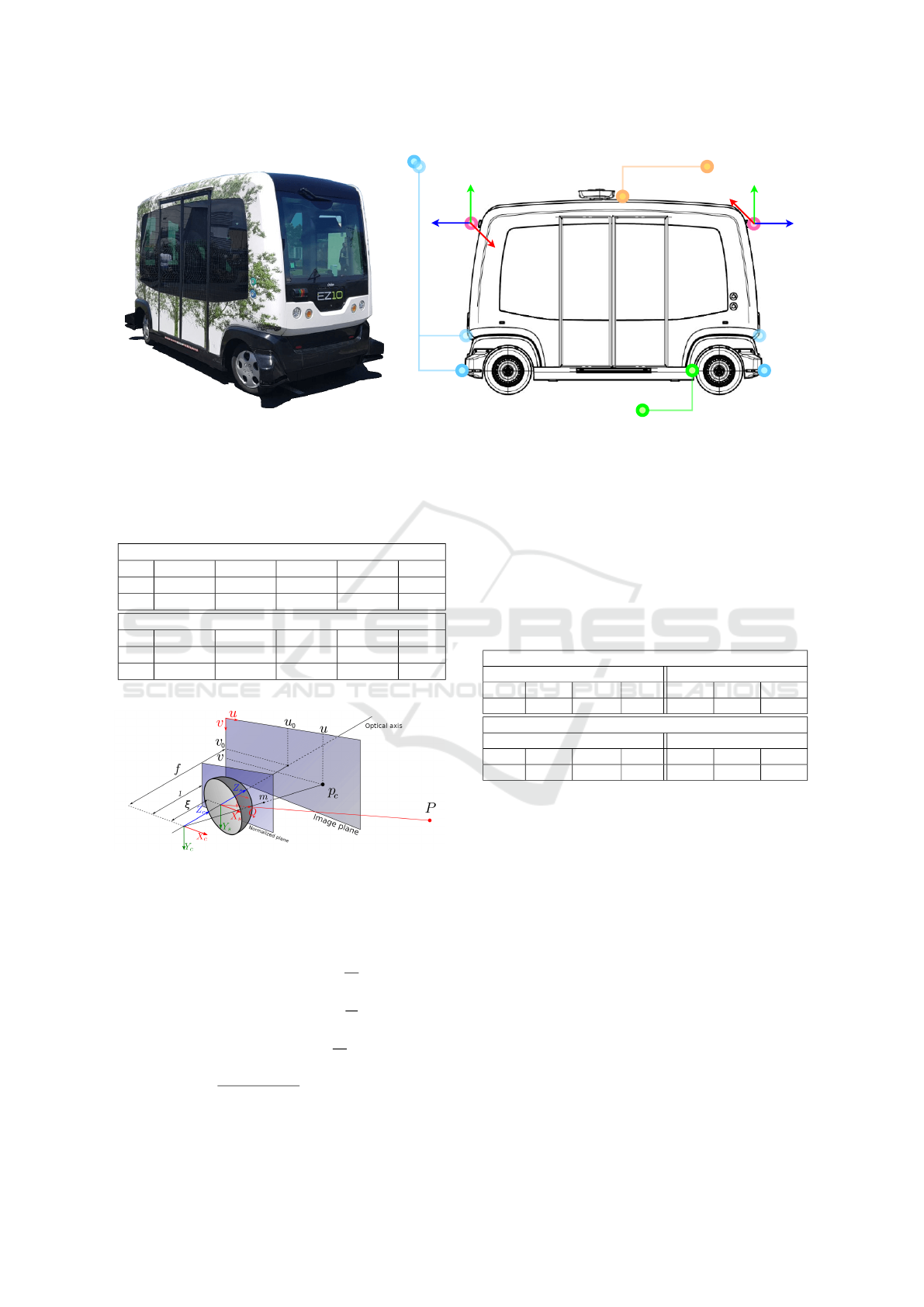
were recorded with our experimental vehicle pre-
sented in Figure 4. It consists of an electric shuttle
that is equipped with two cameras (front and rear),
four LiDAR systems (two front and two rear), a con-
sumer grade global positioning system (GPS). Each
camera is recording gray-scale images with 10Hz fre-
quency and both of them are having 100
◦
FoV (Field
of View).
The cameras were slightly moved in April 2019,
so we have two different calibration settings, one for
sequences recorded before April 2019 and one for
more recent sequences. All the sequences are saved
in rosbag files format and can be read by the ROS
middleware (Quigley et al., 2009). The rosbag files
contain the following rostopics:
• /cameras/front/image: front camera images.
• /cameras/back/image: rear camera images.
• /robot/odom: absolute poses calculated by wheel
odometry.
• /lidars/front_left/scan: front-left lidar data.
• /lidars/front_right/scan: front-right lidar
data.
• /lidars/back_left/scan: back-left lidar data.
• /lidars/back_right/scan: back-right lidar
data.
• /gps_planar: GPS data.
• /tf_static: contains the extrinsic parameters of
all sensors (cameras, lidars, GPS, . . . ).
In Table 2, we present the intrinsic parameters
of our two cameras which are expressed in the uni-
fied camera model (Barreto, 2006). The unified cam-
era model has five parameters: [γ
x
, γ
y
, c
x
, c
y
, ξ] and
they are used to project a 3D point P(X
s
, Y
s
, Z
s
) ex-
pressed in the Spherical coordinates into a 2D Point
Over Two Years of Challenging Environmental Conditions for Localization: The IPLT Dataset
385
LiDAR
Systems
GPS
Front
Camera
z
y
x
Rear
Camera
z
y
x
IMU +
Odometry
Figure 4: The EasyMile EZ10 electric shuttle used to record our dataset.
p
c
expressed in the image plane as explained in Equa-
tion (1) and Figure 5.
Table 2: Intrinsic parameters of the cameras.
from_2018-10-19_to_2019-03-08
γ
x
γ
y
c
x
c
y
ξ
front 766.3141 769.5469 324.2513 239.7592 1.4513
back 763.5804 766.0006 326.2222 250.7755 1.4523
from_2019-10-01
γ
x
γ
y
c
x
c
y
ξ
front 770.0887 768.9841 330.3834 222.0791 1.4666
back 764.4637 763.1171 322.6882 247.8716 1.4565
Figure 5: Unified camera model. A 3D point P is pro-
jected in the image plane of the camera into a distorted point
p
c
(Lébraly, 2012).
p
c
= Km
c
K =
f 0 u
0
0 f v
0
0 0 1
and m
c
=
X
s
ρ
Y
s
ρ
Z
s
ρ
+ ξ
with ρ =
p
X
2
s
+Y
2
s
+ Z
2
s
and ξ = Z
c
≥ 0
(1)
Table 3 shows the extrinsic parameters of the cam-
eras which are already integrated in the rosbag files.
We have expressed the extrinsic parameters of the
front camera in the coordinate system of the rear cam-
era, this means that we present the translation and the
rotation of the front camera with respect to the axis
of the rear camera (see Figure 4). The rotations are
presented in quaternions.
Table 3: Extrinsic parameters of the cameras.
from_2018-10-19_to_2019-03-08
Rotation Translation
q
x
q
y
q
z
q
w
t
x
t
y
t
z
0.0030 -0.9998 0.01479 0.0123 -0.0304 -0.0698 -3.4635
from_2019-10-01
Rotation Translation
q
x
q
y
q
z
q
w
t
x
t
y
t
z
0.0002 -0.9998 0.0200 0.0089 0.0600 -0.0321 -3.4637
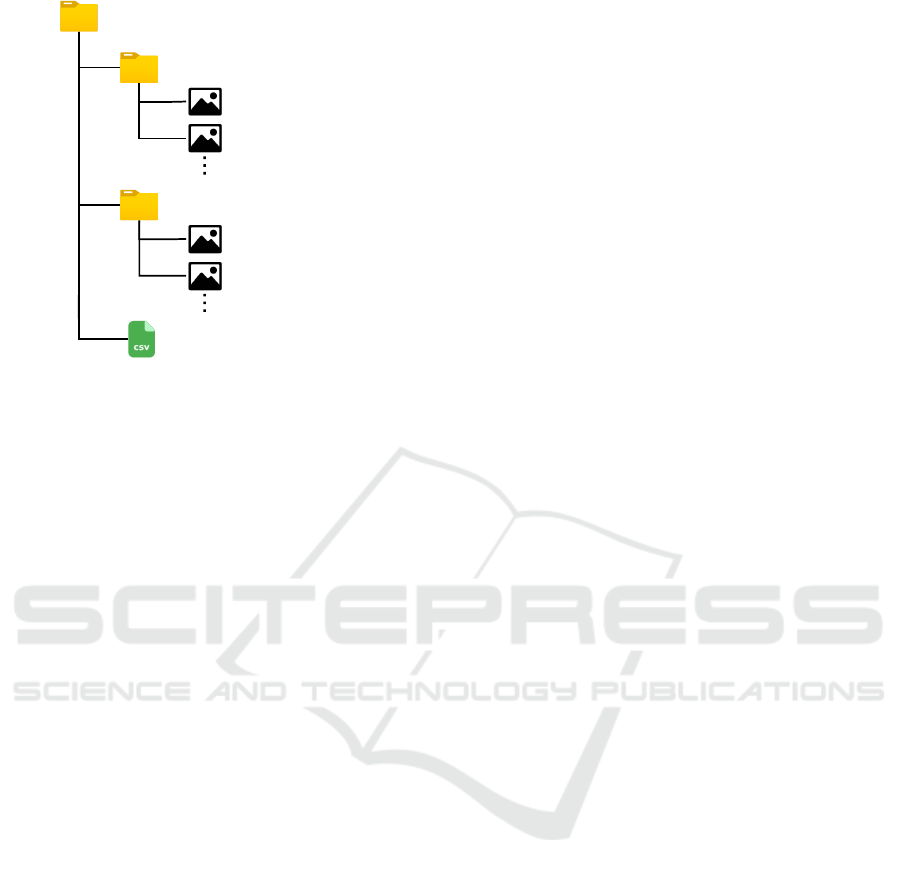
For non ROS users, we provide a Python script
(extract_rosbag.py) that can be used to extract im-
ages and odometry data from the rosbag files. This
script takes as argument a list of rosbag files (one
or more files) and generates a folder for each file as
in the structure presented in Figure 6. Each folder
contains a CSV (comma-separated values) file named
odometry.csv and two sub-folders: camera_back/
and camera_front/. The CSV file contains the ab-
solute poses of the vehicle computed with the wheel
odometry (8 entries for each pose: the translation
t_x, t_y and t_z, the quaternion rotation q_x, q_y,
q_z and q_w, and the corresponding timestamp in
nanoseconds). The two folders camera_back/ and
camera_front/ are containing the images of each
corresponding camera and each image is named with
its acquisition timestamp presented in nanoseconds.
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
386
camera_back/
camera_front/
odometry.csv
<timestamp>.png
<timestamp>.png
<timestamp>.png
<timestamp>.png
2020-02-05-18-37-10/
Figure 6: Structure of a folder generated by using the
Python script (extract_rosbag.py) to extract the content
of the rosbag file "2020-02-05-18-37-10.bag".
4 CONCLUSION
In this paper, we have presented a new dataset that
contains challenging environmental conditions for
long-term localization. This dataset was recorded
over two years and it contains more than 100 se-
quences. We made our dataset available to the com-
munity in the hope that it will be useful to other re-
searchers working in the field of long-term localiza-
tion. This dataset was used in our previous works
to evaluated the performance of different localization
approaches in dynamic environments.
ACKNOWLEDGEMENTS
This work has been sponsored by the French govern-
ment research program "Investissements d’Avenir"
through the IMobS3 Laboratory of Excellence (ANR-
10-LABX-16-01) and the RobotEx Equipment of
Excellence (ANR-10-EQPX-44), by the European
Union through the Regional Competitiveness and
Employment program 2014-2020 (ERDF - AURA re-
gion) and by the AURA region.
REFERENCES
Bansal, A., Badino, H., and Huber, D. (2014). Under-
standing how camera configuration and environmen-
tal conditions affect appearance-based localization. In
2014 IEEE Intelligent Vehicles Symposium Proceed-
ings, pages 800–807. IEEE.
Barreto, J. P. (2006). Unifying image plane liftings for cen-
tral catadioptric and dioptric cameras. In Imaging Be-
yond the Pinhole Camera, pages 21–38. Springer.
Blanco-Claraco, J.-L., Moreno-Duenas, F.-A., and
González-Jiménez, J. (2014). The málaga urban
dataset: High-rate stereo and lidar in a realistic urban
scenario. The International Journal of Robotics
Research, 33(2):207–214.
Bouaziz, Y., Royer, E., Bresson, G., and Dhome, M. (2021).
Keyframes retrieval for robust long-term visual local-
ization in changing conditions. In to appear in 2021
IEEE 19th World Symposium on Applied Machine In-
telligence and Informatics (SAMI). IEEE.
Carlevaris-Bianco, N., Ushani, A. K., and Eustice, R. M.
(2015). University of Michigan North Campus long-
term vision and lidar dataset. International Journal of
Robotics Research, 35(9):1023–1035.
Geiger, A., Lenz, P., Stiller, C., and Urtasun, R. (2013).
Vision meets robotics: The kitti dataset. The Inter-
national Journal of Robotics Research, 32(11):1231–
1237.
Lébraly, P. (2012). Etalonnage de caméras à champs dis-
joints et reconstruction 3D: Application à un robot
mobile. PhD thesis.
Maddern, W., Pascoe, G., Linegar, C., and Newman, P.
(2017). 1 Year, 1000km: The Oxford RobotCar
Dataset. The International Journal of Robotics Re-
search (IJRR), 36(1):3–15.
Pandey, G., McBride, J. R., and Eustice, R. M. (2011). Ford
campus vision and lidar data set. The International
Journal of Robotics Research, 30(13):1543–1552.
Quigley, M., Conley, K., Gerkey, B., Faust, J., Foote, T.,
Leibs, J., Wheeler, R., and Ng, A. Y. (2009). Ros: an
open-source robot operating system. In ICRA work-
shop on open source software, volume 3, page 5.
Kobe, Japan.
Sattler, T., Maddern, W., Toft, C., Torii, A., Hammarstrand,
L., Stenborg, E., Safari, D., Okutomi, M., Pollefeys,
M., Sivic, J., et al. (2018). Benchmarking 6dof out-
door visual localization in changing conditions. In
Proceedings of the IEEE Conference on Computer Vi-
sion and Pattern Recognition, pages 8601–8610.
Siegwart, R., Nourbakhsh, I. R., and Scaramuzza, D.
(2011). Introduction to autonomous mobile robots.
MIT press.
Suenderhauf, N. (2015). The vprice challenge 2015 – visual
place recognition in changing environments.
Sun, P., Kretzschmar, H., Dotiwalla, X., Chouard, A., Pat-
naik, V., Tsui, P., Guo, J., Zhou, Y., Chai, Y., Caine,
B., et al. (2020). Scalability in perception for au-
tonomous driving: Waymo open dataset. In Proceed-
ings of the IEEE/CVF Conference on Computer Vision
and Pattern Recognition, pages 2446–2454.
Xie, J., Kiefel, M., Sun, M.-T., and Geiger, A. (2016). Se-
mantic instance annotation of street scenes by 3d to 2d
label transfer. In Proceedings of the IEEE Conference
on Computer Vision and Pattern Recognition, pages
3688–3697.
Yan, Z., Sun, L., Krajnik, T., and Ruichek, Y. (2020).
EU long-term dataset with multiple sensors for au-
tonomous driving. In Proceedings of the 2020
IEEE/RSJ International Conference on Intelligent
Robots and Systems (IROS).
Over Two Years of Challenging Environmental Conditions for Localization: The IPLT Dataset
387
