
Safety-configuration of Autonomous Bus in Pedestrian Zone
Qazi Hamza Jan and Karsten Berns
Robotics Research Lab, Technische Universit
¨
at Kaiserslautern, 67663 Kaiserslautern, Germany
Keywords:
Safety, Autonomous Bus, Pedestrian-zone, Safety Certification, Certified System, Driver-less Vehicles.
Abstract:
For self-driving vehicles to be equally trusted by the community like conventional vehicles and become a
pivotal part of transportation, it is crucial to guarantee the safety of such vehicles. Safety must ensure that
the vehicle will not collide with other obstacles and always stop in case of system failure. The vehicle used
for the safety-configuration explained in this paper is a mini-bus that can carry around 10 passengers. It
is intended to drive in a pedestrian-zone, an environment that involves many pedestrians and cyclists apart
from occasional vehicles in a close-fitting space. Besides the manufacturer’s basic system provided to enable
safety, safety certified system were added to trigger the safety at specific conditions. This includes emergency
buttons, wireless safety system and configurable laser-scanners. This will allow the vehicle to stop based on
physically activating the safety or automatically by laser-scanners. After various tests, the vehicle was able
to brake immediately. This safety system is guaranteed not be influenced or disabled by any external system.
This safety-configuration is to facilitate the entire system for safety-certification in the future.
1 INTRODUCTION
For all types of Autonomous Vehicles (AVs), safety
is the paramount concernment for researchers. Re-
dundant solutions are added to AVs to avoid any fatal
crash. From present statistics in (Hicks, 2018), the
crash rate of AV is lower then the human crash rate. It
is justifiable to argue that there is still insufficient data
to deduce that AVs are safer than human driven vehi-
cles. Authors in (Kalra and Paddock, 2016), have sta-
tistically reasoned that AVs still need to drive several
miles without failure to remain below a benchmark of
failure rate. They have also argued about the number
of miles required to achieve the comparison between
between AVs and human crash rates. But to achieve
this level of confidence, it is important to assure that
the AVs are safe even in a failure-state. AVs should
be capable to permanently halt after an extreme haz-
ardous fault.
In Germany, exists pedestrian-zones in numerous
parts of the city. According to the German Road Traf-
fic Act (StVO), these zones are indicated by Traffic
Calming zone signs or pedestrian marking. These
areas are meant for pedestrians. Delivery and resi-
dents’ vehicles are usually allowed in such zones with
specific rules. Pedestrians have high priority in such
zones. For an approved vehicle to drive in such a zone
should be at a walking pace. Presently, the allowance
of driver-less vehicles in such zones for carrying pas-
Figure 1: Driver-less bus model planned to drive in Tech-
nische Universit
¨
at Kaiserslautern.
sengers along the stretch of the pedestrian-zone is un-
der process. To enable this allowance, it is important
that the vehicle must comply with the safety standards
provided by the local traffic authorities.
For AVs, particularly driving in pedestrian-zone,
it should pass all the standard safety-related tests pro-
vided by the local traffic authorities to make certain
that they will never even slightly press against any
pedestrian in the case of any malfunction. It should
also be taken into consideration the ludicrous behav-
ior of the pedestrians towards the vehicle. Such be-
havior may include intentionally jumping in front of
the vehicle or playing around the vehicle for amuse-
698
Jan, Q. and Berns, K.
Safety-configuration of Autonomous Bus in Pedestrian Zone.
DOI: 10.5220/0010526106980705
In Proceedings of the 7th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2021), pages 698-705
ISBN: 978-989-758-513-5
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

ment. Here the aim is to provide safety not from per-
ception and mapping algorithms but from the basic
hardware which is always active. When either some-
one reaches the unsafe vicinity of the vehicle or the
system crashes, then the braking must be possible.
One possible scenario is when an unaware pedestrian
steps in front of the vehicle and the navigation algo-
rithm does not react timely or misses such danger.
The vehicle must react to such situations. These are
hard brakes that have no interference from any human
error or navigation algorithms.
For proving the AV to be safe, it should adhere
to standards. These standards are a general set of
rules which specifies that safety will be guaranteed
in all situations. Different tests are performed based
on these standards to check their effectiveness. This
paper focuses on explaining the safety configuration,
specifically for autonomous-bus shown in Figure 1.
This bus is the first model to drive on the campus of
Technische Universit
¨
at Kaiserslautern. It can carry 10
passengers and is intended to drive from building to
building on the university campus. Safety parame-
ters are discussed in this paper to understand how the
safety configuration should look like. This safety con-
figuration is then extendable to other AVs by changing
the safety-parameters and adding redundant systems
based on the application. Different levels of safety are
discussed, from the noncritical level which is safety
programmed in software to the utmost critical level,
i.e., directly low-level hardware in the vehicle.
The following sections are arranged as follows.
Section 2 discussed the related work, Section 3 ex-
plains the concept of safety layers which was imple-
mented for our AV. To verify the system, the structure
for experiments is explained in Section 4 and the con-
clusion is addressed in Section 5.
2 RELATED-WORK
To test autonomous driving-related algorithms in the
urban environment, many researchers are using simu-
lation for safety purposes. The authors in (Jan et al.,
2019) have used simulation for driving autonomous
vehicle in a pedestrian zone. They have brought in-
teraction strategies in the navigation of autonomous
vehicles in the pedestrian zone. There is work for de-
veloping realistic pedestrians as in (Jan et al., 2020;
Alghodhaifi and Lakshmanan, 2020). There are ap-
plications other than urban environment where simu-
lations are used as in (Husemann et al., 2020). But
there always remains a gap between simulation and
real-world testing. It is impossible to map all the re-
alistic behaviors in the simulations. Hence, after suc-
cessfully completing tests in simulation it is then to
be tested on a real vehicle. Considering the possible
incongruity of software with the hardware, the system
must be safe independent of any software or other in-
terference. All these applications are required to have
safe systems because there is always involvement of
humans in such areas.
Authors in (Reschka, 2016) have talked about
safety concept for autonomous vehicles. They have
focused on Safe State which according to safety stan-
dards depends on current situation and acceptable
threshold value. Acceptable level of risk must be
identified with reference to ISO 26262 standards.
Huang et al. (Huang et al., 2016) have given a review
on testing methods for AVs. They have presented dif-
ferent tests such as software testing, simulation test-
ing and AVs functional testing. They also discuss the
design and system validation which which depends on
functional requirements.
Figure 2: Representing the safety of the given system in
three levels from most critical to least critical.
Martin et al. (Martin et al., 2015) have in de-
tail talked about the certification of autonomous ve-
hicles. They have given the process of standardiz-
ing the laws for AVs based on for National High-
way Traffic Safety Administration (NHTSA) in the
United States. The NHTSA includes a variety of top-
ics from licensing of an operator to regulation for the
operation of an autonomous vehicle. A safety design
concept was brought in (Molina et al., 2017). They
have implemented an independent module known as
Autonomous Vehicle Control(AVC), which can be in-
Safety-configuration of Autonomous Bus in Pedestrian Zone
699
stalled in the AV system and create a separate protec-
tion layer. It also accepts requests from a driver but
still ensures the safety of the system.
In (Aeberhard et al., 2015), the researchers have
tested their AVs on a German highway. They have
given an overall view of their system from perception
to vehicle control. They also mention to be certified
they need to drive thousands of kilometers which de-
lays the realistic requirement for their car production.
To pass the functional safety standard for road vehi-
cles, which is, ISO 26262, a thorough analysis is to
be done.
UL4600 standard is discussed in (Koopman et al.,
2019). They have focused on safety standards which
also addresses the use of Machine learning tech-
niques and unpredictable algorithms that are non-
deterministic. It is also required to update these stan-
dards to cope with the emerging technologies. Still, it
is unknown, how these standards must be applied.
It can be seen from the literature, that an indepen-
dent and reliable safety system is required to stop the
vehicle for different applications. Algorithms tested
in a virtual environment cannot be trusted directly.
Also, concrete policies should be shaped to certify
such vehicles. But to facilitate the certification pro-
cess, the required certification for the basic modules
must be accomplished. It should follow a set of cer-
tain general rules to ensure safety let alone the safety
regulations by the authorities.
3 SAFETY SYSTEM
CONFIGURATION
To ensure the safety of our AV in the pedestrian zone,
this section discusses in detail the safety-related con-
figuration from the emergency-braking (hardware) to
planning-algorithms (software). The configuration is
divided into three different levels which can be seen
in Figure 2. The bottom block shows the most critical
level of safety. This is because it is independent of
any external input and will always trigger safe stop in
case of any self failure or activation of safety param-
eter. The higher limits of every non-critical layer are
the lowest limit to the critical layer. All these layers
are described in the following section.
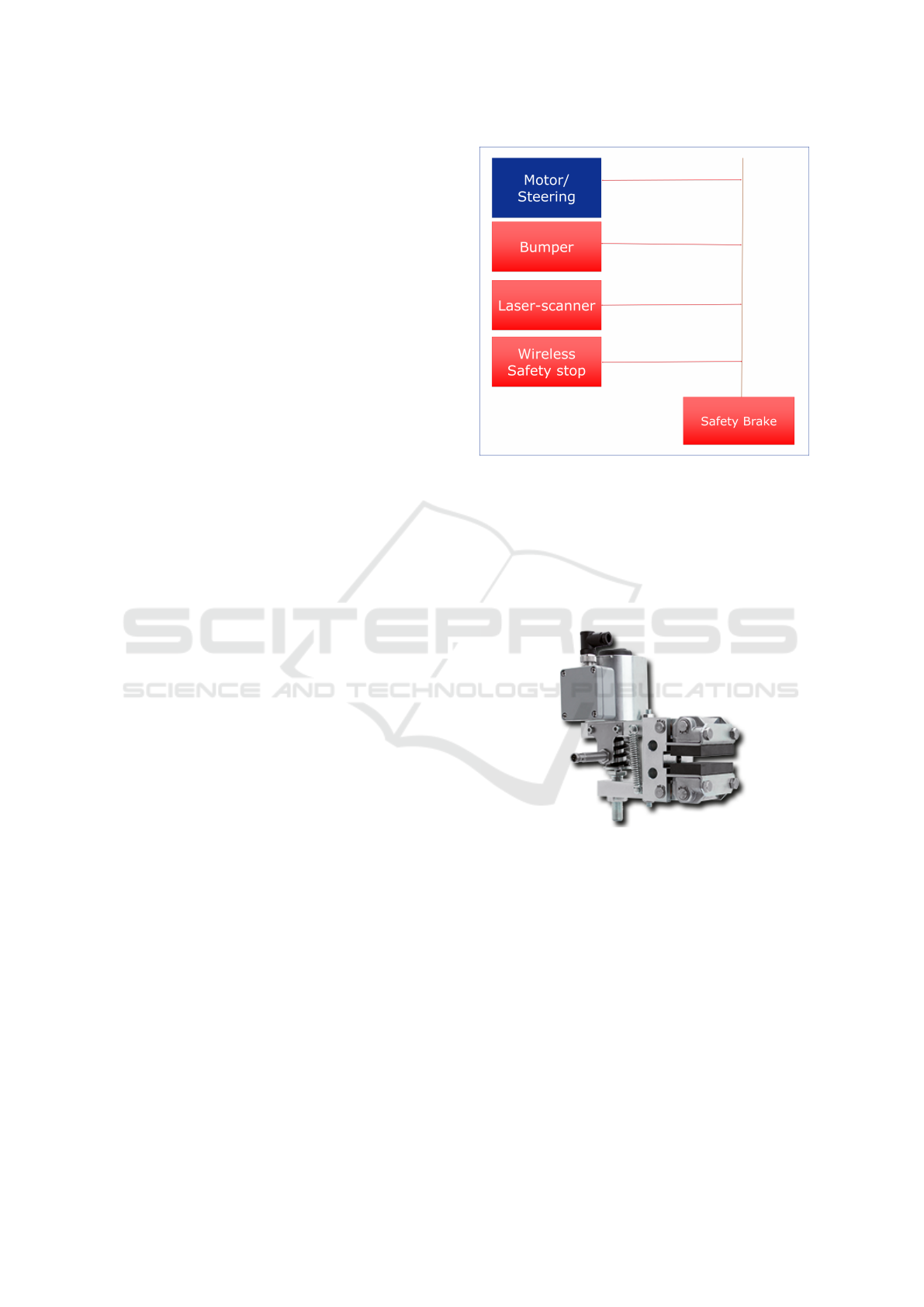
The overall construction is that there is a close-
loop circuit that runs through all the safety modules.
These devices must be safety certified. These devices
are shown in Figure 3. The orange line shows the
safety circuit line. The safety circuit line is a low volt-
age line that is connected to relays. When this line is
disrupted by any other module, it causes the motors to
deactivate and in return the safety brake is activated.
Figure 3: All the hardware module is connected to safety
circuit line. This line is directly connected to the safety
brake for emergency stop.
In figure 3, the circuit line in orange color is attached
to all the suitable modules.
For compliance with the safety standards, the
hardware must be safety certified. The details of the
hardware-specific are explained in this section.
Figure 4: Brake Caliper.
3.1 Hardware
The default hardware enables the system to brake in
case of any failure. This is verified by using a safety
circuit line which is then connected directly to Elec-
tromagnetic Brake Calipers. The brake model used in
the vehicle of figure 1 is DH012FEM. This brake is
electromagnetically released, enabling braking even
on voltage failure. Figure 4 shows the model of emer-
gency brakes. This brake is eligible to have the CSA
mark, which ensures that the product is tested for ap-
plicable standards by doing rigorous testing. It has a
clamping force of 1850 N which will ensure to over-
come the momentum of the vehicle.
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
700
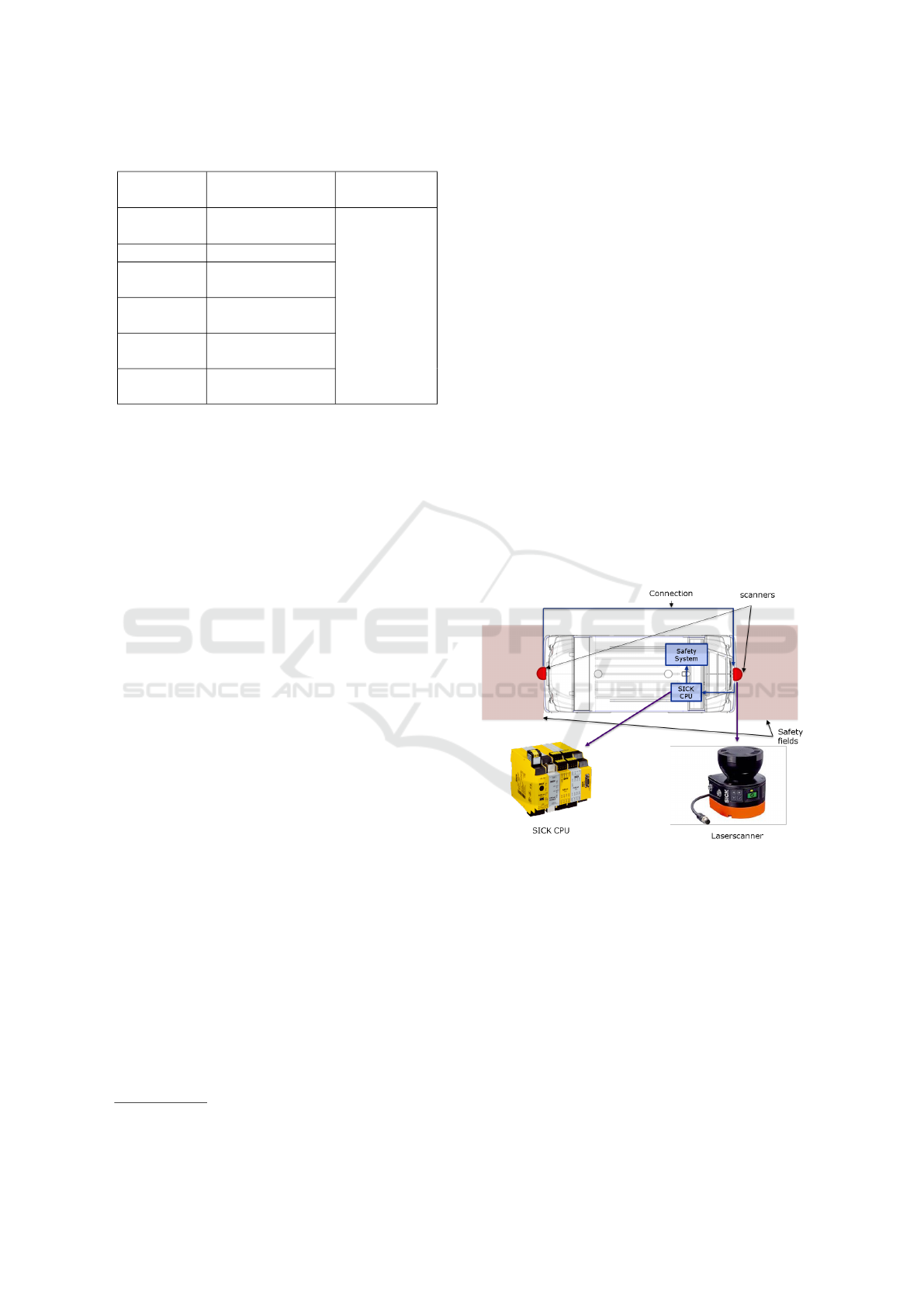
Table 1: The table shows failure/unsafe conditions.
Causes
Status
E-brake and
Motor
Over
speeding
> 8km/h
Battery Failure
E-Brake =
enabled
Motor =
disabled
Emergency
button
Pressed
Safety
bumper
Pressed
Door
contacts
Opened
(Driving)
Laser
scanners
Safety
Field Interrupted)
The instant the safety circuit line is out of power
due to any of the safety module, it disables the elec-
tric motors, and safety brakes in the front and rear are
enabled. The basic rule conformed with safety are de-
fined in the Table 1.
For avoiding any disruption from other modules,
the safety hardware is segregated from the rest of the
hardware and software. This ensures that the safety
will always be active in the base level excluding the
failure from a higher level as designed in Figure. 2.
This will also guarantee that any programming error
from the human will never interfere with the safety
of the system. By doing so, the safety certification of
the modules remains valid. All the connected safety
modules are explained in the following subsection.
3.1.1 Laser-scanners
For the vehicle given in Figure 1, system from SICK
AG
1
is used to add other mechanisms of enabling
safety. SICK system provides a flexibility in con-
figuring the main controllers with the combination
of durable sensors. These systems are specifically
aimed in applications where human protection is re-
quired. Overall, SICK provides different solutions for
industries which are safe and efficient. The vehicle is
equipped with the following modules from SICK:
1. Main-module: Programmable for inputs and out-
puts.
2. Gateway: For communicating with other sensors
and devices.
3. I/O Module: To get the inputs and outputs from
switches and sensors.
4. Motion Control Module: To integrate the motor
and steering encoders from the vehicle
1
https://www.sick.com/de/en
5. Safety Relay: To connect the system to safety cir-
cuit line.
6. Safety Relay: Add a mechanical switch to the sys-
tem
7. Safety Laser Scanners: For detection of obstacle
in a particular range.
The main module have Safety Integrity Level
(SIL) 3 and Safety Integrity Level, Claim Limit
(SILCL) 3. These SIL specify a target level of risk
reduction. These are measurements for Safety In-
strument Function (SIF) performance requirements.
There are four SILs defined, with SIL1 being the
least and SIL4 as the highest dependable. Interna-
tional Electrotechnical Commission (IEC) provides
the standards for a vast range of technologies that con-
form to international standards. IEC 61508 has clas-
sified SIL into two main classes; systematic safety
integrity and hardware safety integrity. All devices
having SIL certification should achieve both of these
classes. The method for hardware safety integrity is to
use probabilistic analysis. The probability of danger-
ous failure per hour(PFH) defined in IEC EN 61508
is between 0.0000001-00000001 for SIL3.
Figure 5: The figure shows the top view of vehicle with
SICK system installation layout. The red semi-circle in the
front and back shows the outdoorScan3 placed under the
safety bumper.
The main module does all the processing of con-
nected input/output devices. The connection can be
either through Gateway, I/O module, Motion control
module, or laser-scanner. The configuration is done
in Safety Designer (SD) software which is a certi-
fied tool provided by the SICK. SD software provides
all connection and configuration handling for mod-
ules such as input/outputs, motion controllers, and
laser-scanners. The installation layout of the scan-
ner and SICK processing unit can be seen in Fig-
ure 5. Both the scanners are connected in a line-
Safety-configuration of Autonomous Bus in Pedestrian Zone
701

configuration with the main-module through Gateway
to get the safe inputs/outputs. Each laser-scanner is
configured separately to provide the required signals
to the main-module
1. Main-module: The main-module processes all the
signals from the input and output. These input and
output signals could be from input/output mod-
ules or laser-scanners. The processing is done
based on the valid configuration saved in its sys-
tem plug. In the SD software, the main-module
has a logical editor, where, all the logic is imple-
mented based on the requirements.
2. Safety Laser Scanner: For laser-scanner, the out-
doorScan3
2
is used. The outdoorScan3 is certified
for use in an outdoor environment. It has a rugged
design with extra shockproof. It can be used in
slightly unfavorable weather conditions like rain,
snow, and fog. It has SIL2 and SILCL2. In the
event of a fault, the safety output via the network
becomes logic 0. This is detected by the main
module and the system enables the safety of the
vehicle.
The laser-scanner offers to create protective and
warning fields. These fields are configurable
shapes in the area of measurement of the scan-
ner, which when detects an obstacle within the
limits of that shape, disables the safe/unsafe out-
puts(depending on the field) from the scanner.
This is very useful because there exists different
stopping distances at different velocities for vehi-
cles. It can be programmed to monitor 8 fields si-
multaneously. The characteristics of configurable
fields are:
(a) Warning field: For functional use only with a
range of 40m.
(b) Protective Field: For detection and protection
with a range of 4m.
Figure 6: This is the top view of the vehicle at a close-fitting
corner. The shape of field must be changed to avoid static
obstacles otherwise it would always go to a stop position.
2
https://www.sick.com/de/en/opto-electronic-protective-
dev ices/safety-laser-scanners/outdoorscan3/c/g503552
128 monitoring cases can be set in the laser-
scanner. The relevant field-sets can be assigned
to every monitoring cases, and activated based on
input provided to the laser-scanner. For the sce-
nario in this paper, the monitoring cases can be
seen in Section. 4. Specific monitoring cases is
active based the values set from the encoder read-
ing. Two encoders are used on from the motor for
speed measurement and the other from the steer-
ing. The more the speed is, the more stopping
distance and, hence the larger the field is created.
This kind of design will enable the vehicle not
to collide at variable speeds and different steering
angles.
Figure 7: The safety bumper is shown in yellow and black
strip. Bumper placement for safe stop is place at the front
and rear.
As for the case of speed only, it is important to
change the field shape to a pertinent steering. This
is due to the following reasons:
(a) It becomes critical when steering the vehicle.
As the vehicle has a double-Ackermann steer-
ing which can implies that both front and rear
wheels steer symmetrically. For this reason, it
is expected to have a smaller turning radius.
Protective fields must be designed such that it
is intercepted timely by the pedestrians walk-
ing alongside of the vehicle on a curve.
(b) Another explanation for designing the fields is
demanded at narrow turns. This can be seen in
Figure 6. As the narrow turn approaches, the
fields must shape in a way that avoids the in-
clusion of obstacles like bushes or other struc-
tures. Otherwise, the vehicle will always go to
a safety-stop state.
3.1.2 Safety Bumpers
The safety bumpers are used as last resort for safety
stop. These are active collision cushions which have
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
702

Figure 8: Grossfunk wireless safety switch for activation of
safety in the vehicle.
safety switch-off function. This is directly connected
to the safety circuit line. The position of the safety
bumper can be seen in Figure 7.
3.1.3 Wireless Safety Stop
For redundancy in activating of safety stop, a wireless
safety stop is installed directly with the safety line cir-
cuit. The component used is from Grossfunk. This
has a wireless remote and receiver which is securely
transmits data. It is activated when either the button
is pressed or the remote goes out of range. During the
initial operation and testing of the vehicle, the vehicle
will always be under direct sight of a human opera-
tor, so in case of emergency he/she can activate the
wireless stop.
3.1.4 Motor
Two 15kW motors are installed for the front and
rear wheels. These motors are controlled by motor-
controllers that take commands from the basic control
discussed in Section 3.2. The motors are deactivated
in case of emergency brakes. It has IP54 protection.
It also has a thermal sensor and encoder for feedback
to the motor-controller. These motors are powerful
enough to drive the vehicle up to 40 km/h.
3.2 Basic Control
The basic control between our software and hardware
is manufactured by Kompairobotics
3
. Our system can
communicate with the basic control through Ether-
net to a jetson where their architecture is active. All
3
https://kompairobotics.com/robot-kompai/
the basic configurations can be set in this architec-
ture. This includes velocity, steering, and other in-
put/output commands. It has a watchdog mechanism
between the low-level controller and all CAN devices.
If there is any dysfunction or no velocity command is
received then the emergency stop is activated.
3.3 Software
Safety is also taken into account from our au-
tonomous navigation architecture known as Ro-
bust bEhAvior-based ConTrolfor Off-road Navigation
(REACTiON) (Wolf et al., 2018). This is the least
critical in terms of safety but it is considered to re-
act first to a situation. REACTiON takes into con-
sideration the vehicle kinematics and based on that it
autonomously drives the vehicle. It does all the path-
planning and avoids the static and dynamic obstacles.
This is done in order to avoid the activation of safety
brakes repeatedly.
The architecture has a safety module which cre-
ates virtual bumpers from the same front and rear
laser-scanner shown in Figure 5. The velocity de-
creases based on activation of these bumpers. Nor-
mal vehicle brakes are activated once the size of the
bumper becomes less then the threshold.
Table 2: The table shows the different monitoring cases and
the required fields.
Monitoring
Case
Description Fields
Driving
straight
When driving
straight the fields are
perfect square
Turning
right
At full steering
towards right
Turning
left
At full steering
towards left
4 EXPERIMENTS AND RESULTS
Due to the nature of the experiment, it is not possi-
ble to show the results in the paper. Since the experi-
ments were related explicitly to hardware testing. But
to explain the formation of the protective and warn-
ing fields, the vehicle turning radius is discussed and
the relevant created fields are shown in the Table 2.
Safety-configuration of Autonomous Bus in Pedestrian Zone
703

Table 3: Chosen speed, steering angles and relevant moni-
toring case numbers. The numbers inside the table present
the monitoring cases which are assigned as MCXXX to the
laser-scanner.
Speed (km/h)
0 1 2 3 5 8
Steering angles (degrees)
-22 -220 -221 -222 X X X
-15 -150 -151 -152 -153 X X
-10 -100 -101 -102 -103 -105 X
-5 -50 -51 -52 -53 -55 X
0 00 01 02 03 05 08
5 50 51 52 53 55 X
10 100 101 102 103 105 X
15 150 151 152 153 X X
22 220 221 222 X X X
The discrete speeds are chosen from 0 km/h to 8 km/h.
Lower speeds are mostly selected because the vehi-
cle is expected to drive more at lower speeds. For our
case, the maximum threshold of highest driving speed
was 8 km/h. In case the vehicle reaches this speed,
SICK will enable safety brakes because it is never
expected to reach such speeds in a pedestrian zone.
The maximum steering the vehicle is able to achieve
is 22
◦
. 5
◦
angle of interval is selected for every chosen
speed. The Monitoring cases in the laser-scanner are
assigned base on the table. 3 for every speed and steer-
ing angle. X in Table 3 implies that monitoring case
for such a sequence of speed and steering is not pre-
ferred since high steering is unsuitable at high speeds,
especially in a pedestrian zone.
For fields at a particular steering, the turning ra-
dius of the vehicle was found by the following equa-
tion:
R =
q
(l/2)
2
+ l
2
cot
2
α
The equation was taken from (Bhavesh K.Gohil,
2018), where R is the turning radius, l is the distance
from front wheel to rear wheel. and α is the steer-
ing angle. After taking the dimensions of the bus and
maximum steering angle, it was noted that the turn-
ing radius for the vehicle in Figure 1 is 4.2m. This
is shown in figure. 9. Based on the values from the
steering encoders, the associated fields are activated.
This field is made not larger then the outer and inner
turning radius of the vehicle. As mentioned in the sec-
tion 3.1.1, this is important when the vehicle reaches a
sharp corner. Figure 10 shows similar situations with
protective and warning fields. It can be seen that the
bushes are not taken as an obstacle of turning in the
other direction and the vehicle can easily turn without
safety brake activation.
Figure 9: The figure shows the protective field in red and
warning field in yellow for speed of 1km/h with full right
steering. The turning radius for this vehicle is 4.2m.
Figure 10: The figure show the perpective view of the ve-
hicle from image 6. The shape of the fields are such that it
turns in at the corner without enabling the safety brakes.
5 CONCLUSION
This paper has described the safety configuration of
the Driver-less bus shown in Figure 1. This driver-
less bus is meant for driving autonomously in a
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
704

pedestrian-zone. The most important feature when
driving in such zones is the safety of the people and
environment. Hence, it is essential that the vehicle is
totally safe even during a malfunction or any glitch in
the system. This ensures that the vehicle should stop
in any case to avoid collision with the people or envi-
ronment. On the other hand, the vehicle should also
stop when someone is trying to compellingly mess-
around the vehicle. The hardware used for safety is
safety certified to fulfill the requirements of safety
certification. By performing the tests, the vehicle was
able to stop at different speeds without colliding with
the obstacle by forging the system manually in all
possible ways.
The process of safety certification for autonomous
vehicles is not defined explicitly. It varies according
to application and country. But to achieve the certifi-
cation in a later stage it is important to use and follow
the standard types of equipment that are already cer-
tified to ease the validation process.
REFERENCES
Aeberhard, M., Rauch, S., Bahram, M., Tanzmeister, G.,
Thomas, J., Pilat, Y., Homm, F., Huber, W., and
Kaempchen, N. (2015). Experience, results and
lessons learned from automated driving on germany’s
highways. IEEE Intelligent transportation systems
magazine, 7(1):42–57.
Alghodhaifi, H. and Lakshmanan, S. (2020). Simulation-
based model for surrogate safety measures analysis
in automated vehicle-pedestrian conflict on an urban
environment. In Autonomous Systems: Sensors, Pro-
cessing, and Security for Vehicles and Infrastructure
2020, volume 11415, page 1141504. International So-
ciety for Optics and Photonics.
Bhavesh K.Gohil, Nilesh G. Joshi, H. B. P. P. B. K. (2018).
Optimization of steering system for four wheel vehi-
cle. IEEE Technology and Society Magazine, 6(8):52–
62.
Hicks, D. J. (2018). The safety of autonomous vehicles:
Lessons from philosophy of science. IEEE Technol-
ogy and Society Magazine, 37(1):62–69.
Huang, W., Wang, K., Lv, Y., and Zhu, F. (2016).
Autonomous vehicles testing methods review. In
2016 IEEE 19th International Conference on Intelli-
gent Transportation Systems (ITSC), pages 163–168.
IEEE.
Husemann, J., Wolf, P., Vierling, A., Berns, K., and Decker,
P. (2020). Towards high-quality road construction:
Using autonomous tandem rollers for asphalt com-
paction optimization. In ”Osumi, Hisashi”, F. H.
T. K., editor, Proceedings of the 37th International
Symposium on Automation and Robotics in Construc-
tion (ISARC), pages 90–97, Kitakyushu, Japan. Inter-
national Association for Automation and Robotics in
Construction (IAARC).
Jan, Q. H., Kleen, J. M. A., and Berns, K. (2020). Self-
aware pedestrians modeling for testing autonomous
vehicles in simulation. In VEHITS, pages 577–584.
Jan, Q. H., Klein, S., and Berns, K. (2019). Safe and effi-
cient navigation of an autonomous shuttle in a pedes-
trian zone. In International Conference on Robotics in
Alpe-Adria Danube Region, pages 267–274. Springer.
Kalra, N. and Paddock, S. M. (2016). Driving to safety:
How many miles of driving would it take to demon-
strate autonomous vehicle reliability? Transportation
Research Part A: Policy and Practice, 94:182–193.
Koopman, P., Ferrell, U., Fratrik, F., and Wagner, M.
(2019). A safety standard approach for fully au-
tonomous vehicles. In Romanovsky, A., Troubitsyna,
E., Gashi, I., Schoitsch, E., and Bitsch, F., editors,
Computer Safety, Reliability, and Security, pages 326–
332, Cham. Springer International Publishing.
Martin, J., Kim, N., Mittal, D., and Chisholm, M. (2015).
Certification for autonomous vehicles. Automative
Cyber-physical Systems course paper, University of
North Carolina, Chapel Hill, NC, USA.
Molina, C. B. S. T., De Almeida, J. R., Vismari, L. F.,
Gonzalez, R. I. R., Naufal, J. K., and Camargo, J.
(2017). Assuring fully autonomous vehicles safety by
design: The autonomous vehicle control (avc) mod-
ule strategy. In 2017 47th Annual IEEE/IFIP Inter-
national Conference on Dependable Systems and Net-
works Workshops (DSN-W), pages 16–21. IEEE.
Reschka, A. (2016). Safety concept for autonomous ve-
hicles. In Autonomous Driving, pages 473–496.
Springer.
Wolf, P., Ropertz, T., Berns, K., Thul, M., Wetzel, P.,
and Vogt, A. (2018). Behavior-based control for safe
and robust navigation of an unimog in off-road envi-
ronments. In Commercial Vehicle Technology 2018,
pages 63–76. Springer.
Safety-configuration of Autonomous Bus in Pedestrian Zone
705
