
Scalable k-anonymous Microaggregation: Exploiting the Tradeoff
between Computational Complexity and Information Loss
Florian Thaeter
a
and R
¨
udiger Reischuk
b
Institut f
¨
ur Theoretische Informatik, Universit
¨
at zu L
¨
ubeck, Ratzeburger Allee 160, L
¨
ubeck, Germany
Keywords:
Microaggregation, k-anonymity, Data Clustering.
Abstract:
k-anonymous microaggregation is a standard technique to improve privacy of individuals whose personal data
is used in microdata databases. Unlike semantic privacy requirements like differential privacy, k-anonymity
allows the unrestricted publication of data, suitable for all kinds of analysis since every individual is hidden in
a cluster of size at least k. Microaggregation can preserve a high level of utility, that means small information
loss caused by the aggregation procedure, compared to other anonymization techniques like generalization
or suppression. Minimizing the information loss in k-anonymous microaggregation is an NP-hard clustering
problem for k ≥3. Even more, no efficient approximation algorithms with a nontrivial approximation ratio are
known. Therefore, a bunch of heuristics have been developed to restrain high utility – all with quadratic time
complexity in the size of the database at least.
We improve this situation in several respects providing a tradeoff between computational effort and utility.
First, a quadratic time algorithm ONA
∗
is presented that achieves significantly better utility for standard bench-
marks. Next, an almost linear time algorithm is developed that gives worse, but still acceptable utility. This
is achieved by a suitable adaption of the Mondrian clustering algorithm. Finally, combining both techniques a
new class MONA of parameterized algorithms is designed that deliver competitive utility for user-specified time
constraints between almost linear and quadratic.
1 INTRODUCTION
k-anonymous microaggregation is a technique de-
signed to improve privacy of individual-related data,
still keeping the data useful for research. It has been
introduced by Anwar, Defays and Nanopoulus (An-
war, 1993; Defays and Nanopoulos, 1993) in 1993.
Higher dimensional numerical data is clustered into
groups of size at least k. We will call the result
a k-member clustering in contrast to a k-clustering
where the number of clusters is bounded by k. As
final output each data point is represented by the cen-
troid of its cluster and thus the modified database is
k-anonymous (Samarati, 2001; Sweeney, 2002).
While k-anonymity is quite a simple condition,
other more complex properties have been considered
to guarantee privacy like `-diversity (Machanava-
jjhala et al., 2007), t-closeness (Li et al., 2007) or ε-
differential privacy (Dwork et al., 2006). `-diversity
and t-closeness may sound theoretically more appeal-
ing, but it is unclear whether and how efficiently
a
https://orcid.org/0000-0002-6870-5643
b
https://orcid.org/0000-0003-2031-3664
these properties can be achieved in practice. In ad-
dition, they require a strict separation of attributes
into so-called quasi-identifiers (QI) and confidential
attributes (CA) which decreases the flexibility when
using the anonymized data. On the other hand, differ-
ential privacy is restricted to a setting where instead
of anonymizing the database and making it publicly
known, only a predefined type of questions can be
sent to the owner of the database. The answers pro-
tect private information by adding a suitable amount
of noise depending on the diversity of the data and
the type of questions. The usability is therefore lim-
ited and highly diverse data may yield quite useless
answers because of larger deviations. For a more de-
tailed discussion why these measures cannot replace
k-anonymity entirely see (Li et al., 2012).
Minimizing the information loss in k-anonymous
microaggregation is an NP-hard optimization prob-
lem for k ≥ 3 (Oganian and Domingo-Ferrer, 2001;
Thaeter and Reischuk, 2020). Even more, no ef-
ficient approximation algorithms with a nontrivial
approximation ratio are known. Several heuris-
tics with quadratic time complexity in the number
Thaeter, F. and Reischuk, R.
Scalable k-anonymous Microaggregation: Exploiting the Tradeoff between Computational Complexity and Information Loss.
DOI: 10.5220/0010536600870098
In Proceedings of the 18th International Conference on Security and Cryptography (SECRYPT 2021), pages 87-98
ISBN: 978-989-758-524-1
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
87

of individuals have been developed to achieve k-
anonymity (see e.g. (Domingo-Ferrer and Torra,
2005; Thaeter and Reischuk, 2018; Soria-Comas
et al., 2019)). Quadratic time may be acceptable for
small databases, but large ones with millions of indi-
viduals cannot be handled in reasonable time.
Our work tries to mitigate this problem. In 2006
LeFevre et al. introduced MONDRIAN, a clustering al-
gorithm that achieves k-anonymity in O(n logn) time
(LeFevre et al., 2006). The optimization goal of the
MONDRIAN algorithm are clusters with sizes as close
to k as possible. This algorithm has not been devel-
oped for microaggregation, still it creates clusterings
with cluster size at least k. Hence, this strategy can
be used to perform k-anonymous microaggregation
by calculating and reporting centroids for each clus-
ter created. However, the question arises whether the
resulting information loss is comparable to state-of-
the-art heuristics designed to minimize information
loss. Our investigations have shown that this is not
the case. Therefore we modify and improve this strat-
egy to design two new algorithms MONDRIAN V and
MONDRIAN V2D that have the same time complexity as
the original one, but achieve reasonable utility. The
information loss occurring is larger than that of the
best quadratic time algorithms, but still on the same
order. These results will be presented in section 4.
Most competitive k-anonymous microaggregation
algorithms are based on the MDAV (maximum dis-
tance to average vector) principle initially formulated
by Domingo-Ferrer et al. in (Domingo-Ferrer and
Torra, 2005). The idea is to start with an element ¯x
of greatest distance to the centroid c(X) of the whole
database X and to form clusters by grouping ¯x with
its k −1 nearest neighbours. If less than k elements
are left, the remaining elements are assigned to their
closest cluster. Since the distance of many pairs of el-
ements has to be computed this results in quadratic
time complexity. While no approximation guaran-
tees have been shown for this strategy and further im-
provements, these algorithms seem to perform well
on benchmark databases.
In (Thaeter and Reischuk, 2018) we have pro-
posed an extension called MDAV
∗
. Instead of creating
a new group in every step, one is given the additional
option to add the current most distant element ¯x to the
closest cluster already created. The decision is made
by comparing the impact on cluster cost in the local
area. Without increasing the time complexity signif-
icantly the results in (Thaeter and Reischuk, 2018)
show that MDAV
∗
outperforms MDAV and other MDAV
variants. Another approach named PCL has been pre-
sented in (Rebollo-Monedero et al., 2013) using clus-
tering techniques for the case that an upper bound is
given on the number of clusters – the k-means prob-
lem – instead of a lower bound on the size. However,
no analysis of its computational complexity seems to
have been made.
In 2019 Soria-Comas et al. presented an algorithm
named ONA (Near-Optimal microaggregation Algo-
rithm) (Soria-Comas et al., 2019). It is based on the
Lloyd algorithm for efficiently clustering high dimen-
sional data that starts with a random clustering and
then iteratively improves the clustering by reassign-
ing data points to closer clusters until a stopping con-
dition holds (Lloyd, 1982). As the Lloyd algorithm
is not tailored to guarantee a lower bound on cluster
sizes it has to be modified. ONA starts with a randomly
created k-member clustering and repeats the follow-
ing steps for several rounds. Iterate over all elements
x and consider their cluster C
x
. If C
x
has more than
k elements try to lower the information loss by reas-
signing x to another cluster. If |C
x
| = k try to improve
the clustering by dissolving C
x
and redistribute its el-
ements to other clusters nearby. Finally, split all clus-
ters that have grown to size at least 2k by applying
ONA recursively. This rearrangement of elements is
stopped when within a round no change has occurred
or a preset number of rounds has been reached.
Regarding information loss ONA seems to be com-
parable to previous quadratic time heuristics on real
and synthetic benchmark databases. However, it was
not possible for us to reproduce the excellent results
claimed in (Soria-Comas et al., 2019). We have inves-
tigated how the strategy of rearranging clusters can be
improved. It turned out that iterating over data points
in an arbitrary order, which seems to be a good strat-
egy for k-clustering, is not as good for k-member clus-
tering. Instead iterating over clusters in a well chosen
order is computationally more efficient and according
to the benchmarks applied gives better utility. This
new strategy called ONA
∗
will be presented in sec-
tion 3. Finally, by combining both methods – almost
linear time complexity with a larger information loss
and quadratic time with better utility – we design two
new classes of algorithms called MONA
ρ
and MONA 2D
ρ
that are scalable by the parameter ρ between almost
linear and quadratic time. They deliver competitive
utility shown by benchmark tests in section 5.
Summarizing the results of this paper, the perfor-
mance of state-of-the-art quasi-linear, resp. quadratic
time heuristics for k-anonymity are significantly im-
proved. Furthermore, we have exploited the tradeoff
between computational effort and data quality provid-
ing a whole range of algorithms that suit different de-
mands in practice.
SECRYPT 2021 - 18th International Conference on Security and Cryptography
88

2 PRELIMINARIES
Definition 1 (Database). A data point, element or in-
dividual is a d-dimensional vector x
i
= (x
1
i
,...,x
d
i
) ∈
R
d
of numerical attributes. A database X = x
1
,...,x
n
is a sequence of data points, potentially including du-
plicates. X is k-anonymous if each data point occur-
ring in X has a multiplicity of at least k.
The common property of all microaggregation al-
gorithms is the use of a k-member clustering to gener-
ate a partition of the data. Once clusters are defined,
elements of the database are replaced by the centroid
of their cluster. As a result one obtains a k-anonymous
database which protects privacy of its individuals by
the principle hiding in a group of k.
Definition 2 (k-member clustering). A k-member
clustering of a database X is a partition C of its mem-
bers into clusters C
1
,...,C
m
such that each cluster
contains at least k elements.
Let δ(x,x
0
) denote the Euclidean distance between
two elements and c(C
j
) =
1
|C
j
|
·
∑
x∈C
j
x the centroid
of a cluster C
j
.
The diversity of a cluster C
j
is defined as
Cost(C
j
) :=
∑
x∈C
j
δ(x,c(C
j
))
2
and the total cost of a clustering C by
Cost(C ) :=
∑
C
j
∈C
Cost(C
j
).
Cost(C ) measures the closeness of elements within
clusters. Once the clusters are established, creating a
k-anonymous database is straight-forward by select-
ing the centroid as the anonymous version of each
data point. Thus the data disturbance of such a proce-
dure is related to Cost(C ) and should be as small as
possible. Let us note
Fact 1: Given a clustering C , for each cluster C
j
the
centroid c(C
j
) and Cost(C
j
) can be computed in
O(|C
j
| d) arithmetic operations.
Hence, Cost(C ) can be estimated in time O(n d) given
C . Note that the input size is N = n ·d real numbers,
thus this computation takes only linear time.
Definition 3 (k-anonymous microaggregation).
Given a database X the k-anonymous microaggre-
gation problem is to find a k-member clustering C
with minimum cost.
It has been shown that this is an NP-hard optimiza-
tion problem for k ≥3 (Oganian and Domingo-Ferrer,
2001; Thaeter and Reischuk, 2020). Even approxima-
tion algorithms with a nontrivial approximation ratio
are not known. Hence, several heuristics have been
developed.
To compare the data disturbance between several
databases of different sizes and dimensionality, the
notion information loss has been introduced. By di-
viding cost by the worst possible clustering (cluster
all elements in one big cluster), one obtains a utility
measure ranging from 0 for perfect utility and 1 for
worst possible utility. Typically, information loss is
stated as percentages, see e.g. (Soria-Comas et al.,
2019).
Definition 4 (Information loss). The diversity ∆(X )
of a database X is the sum of squared distances of all
elements to the global centroid:
∆(X) :=
n
∑
i=1
δ(x
i
,c(X))
2
The information loss of a clustering C of X is defined
as
L(C,X) :=
Cost(C )
∆(X)
.
Thus, for a given database X minimizing Cost(C )
minimizes the information loss, too.
2.1 Benchmarks and Test Setting
To compare different heuristics several benchmark
databases have been used, in particular Census, Tar-
ragona and EIA from the CASC project (Domingo-
Ferrer and Mateo-Sanz, 2002) as well as Cloud1,
Cloud2, the Adult data set and the credit card clients
data set from the UCI Machine Learning Repository
(Lichman, 2013). Census, Tarragona, EIA, Cloud1
and Cloud2 are relatively small databases used to
compare algorithms with quadratic time complexity.
The Adult and Credit Card databases are much bigger
and can only be handled by subquadratic algorithms
in reasonable time. More details are given in the ap-
pendix.
For a meaningful test the attributes of the
databases should be standardized to mean value 0 and
variance 1 prior to anonymization. This ensures that
all dimensions have equal impact on the anonymiza-
tion process and information loss evaluation. As mi-
croaggregation is dimension and order conserving,
this standardization can be reversed after anonymiza-
tion. All information losses given in this paper are ex-
pressed in percentages to be directly comparable with
previously published results. The computations have
been performed based on Java implementations on a
PC equipped with an Intel Core i7 6850K with 4GHz
core frequency and 32 GB of RAM.
Scalable k-anonymous Microaggregation: Exploiting the Tradeoff between Computational Complexity and Information Loss
89
3 MICROAGGREGATION IN
QUADRATIC TIME WITH
LOWER INFORMATION LOSS
A popular class of k-anonymous microaggregation al-
gorithms is based on the MDAV principle explained
in the introduction. The first algorithm MDAV has been
presented in (Domingo-Ferrer and Torra, 2005). The
currently best version of this methodology is MDAV
∗
(Thaeter and Reischuk, 2018). Algorithm 1 gives a
specification.
Algorithm 1: MDAV
∗
(Thaeter and Reischuk, 2018).
input : database X and min cluster size k
output: k-member clustering C
1 Let U ← X ; Let C ←
/
0
2 repeat
3 Let ¯x ∈U be the unassigned element furthest
away from c(X)
4 Let N
k−1
( ¯x,U) be a cluster consisting of ¯x and
its k −1 nearest unassigned neighbours
5 Let N
k−1
(ν( ¯x),U \{¯x}) be a cluster consisting
of the nearest unassigned neighbour ν( ¯x) of ¯x
and the k −1 nearest unassigned neighbours
of ν( ¯x)
6 Let clos( ¯x) be the closest cluster to ¯x
7 Let Cost
1
←
Cost(N
k−1
( ¯x,U))
k
8 Let Cost
2
←
Cost(clos( ¯x)+ ¯x)−Cost(clos( ¯x))+Cost(N
k−1
(ν( ¯x),U \{¯x}))
k+1
9 if Cost
1
≤ Cost
2
then
10 C ∪{N
k−1
( ¯x,U)}
11 U \N
k−1
( ¯x,U)
12 else
13 clos( ¯x) ∪ ¯x
14 U \{¯x}
15 until |U| < k
16 Assign each x ∈U to clos(x)
Our improvements build on this algorithm. Therefore
let us estimate its time complexity precisely. For this
we use the following facts:
Fact 2: For any data point x a list L
x,U
of the dis-
tances to all points of a set U can be computed in
O(|U| d) arithmetic operations.
Fact 3: Given L
x,U
, for every 1 ≤` ≤|U|the `’s near-
est neighbour of x and the set of its ` closest neigh-
bours can be found by O(|U|) comparisons.
Thus, line 3 to 5 of Algorithm 1 each take at most
O(n d) time since |U| ≤ n. Line 6 requires O(n d/k)
steps because there can be at most n/k clusters. Com-
puting the cost in line 7 and 8 takes time O(k d). Thus,
a single execution of the loop requires at most O(n d)
steps. The number of executions can range between
n/k and n. Typically, the case generating a new clus-
ter (line 10 to 11) should be much more likely. Thus,
on average the number of executions should be on the
order n/k. This gives a worst-case time bound O(n
2
d)
and an average bound O(n
2
d/k).
The ONA algorithm (Soria-Comas et al., 2019)
uses a different approach for k-anonymous micro-
aggregation. Its strategy has already been presented
above. A pseudo code of ONA is shown as Algo-
rithm 2. While for large values of k the algorithm de-
livers slightly lower information loss than MDAV vari-
ants on benchmark databases, there are some open is-
sues.
Algorithm 2: ONA (Soria-Comas et al., 2019).
input : database X and min cluster size k
output: k-member clustering C
1 Randomly generate a set of clusters
C ← {C
1
,.. . ,C
m
} such that each cluster contains
at least k elements
2 repeat
3 foreach x ∈ X do
4 Let C
i(x)
be the cluster that contains x
5 if |C
i(x)
| > k then
// Should x be reassigned to
another cluster? (case 1)
6 Extract x from C
i(x)
7 Compute distance between x and the
centroids of the clusters in C
8 Add x to the cluster whose centroid is
closest to x
9 else if |C
i(x)
| = k then
// Should cluster C
i(x)
be
dissolved? (case 2)
10 For s ∈C
i(x)
let C
j(s)
be the cluster
with the closest centroid to s among
those in C \C
i(x)
11 Let L ←{j(s) : s ∈C
i(x)
}
12 Let C
0
`
←C
`
∪{s ∈C
i(x)
: j(s) = `},
for each ` ∈ L
13 Let Cost
1
←
Cost(C
i(x)
) +
∑
`∈L
Cost(C
`
)
14 Let Cost
2
←
∑
`∈L
Cost(C
0
`
)
15 if Cost
1
> Cost
2
then
16 C ← {C
0
`
: ` ∈ L}∪{C
`
: ` 6∈
(L ∪{i(x)})}
// Split large clusters
17 foreach C ∈ C do
18 if |C| ≥ 2k then
19 C ← C \{C}; C ← C ∪ONA(C, k)
20 until convergence condition
It is unclear when to stop the iteration – the conver-
SECRYPT 2021 - 18th International Conference on Security and Cryptography
90

Figure 1: Histogram of the information losses of 1000 ONA
runs on the Census database for k = 10.
gence criteria. An obvious condition is that nothing
has changed within a round, but it is not clear how
many rounds this may require, even more whether this
situation will always be reached. In the implementa-
tion to generate the benchmark results presented be-
low we have stopped the iteration when this condition
has not been fulfilled within 30 rounds. This has hap-
pened very rarely in our tests.
Another problem is caused by the probabilistic
initialization with a randomly generated k-member
clustering. As for the Lloyd algorithm, a bad initial-
ization inevitably leads to a bad output. Hence, the
results may differ quite a lot and indeed, they range
from better to worse than those of MDAV algorithms.
In Figure 1 and Table 2 in the appendix this behavior
is shown on the benchmark database Census.
While the authors do not provide any guidelines
on how to tackle this problem, the standard approach
would be to repeat the algorithm several times, let this
number be µ, and output the clustering with the best
solution found. As can be seen in Table 3, there is
some improvement to be gained by increasing µ. But
when a good confidence is aimed at, this increases the
runtime significantly.
We have analyzed the methodology of generating
and rearranging clusters in detail and propose a new
algorithm, subsequently called ONA
∗
that uses better
selection strategies. In Table 1 ONA and ONA
∗
are com-
pared with a previous state-of-the-art heuristic based
on the MDAV principle.
Replacing the random initial clustering by a good
deterministic process increases the performance sig-
nificantly,. Our experiments have shown that using an
optimized variant of MDAV like MDAV
∗
gives better re-
sults typically with lower information loss compared
to the original ONA algorithm with µ = 100 repetitions.
MDAV
∗
does not guarantee a limit on the maxi-
mum cluster size, however a split is guaranteed if
2k or more elements are given. As a result, inputs
of 3k −1 or less elements cannot result in a cluster
of size 2k or more. To guarantee a maximum clus-
ter size throughout the ONA
∗
algorithm, after initial-
ization with MDAV
∗
we apply the variant MDAV
+
(see
(Thaeter and Reischuk, 2018)) to all clusters of size
2k or more. MDAV
+
delivers slightly worse informa-
tion loss in general, but guarantees a maximum cluster
size of 2k −1 within the same time frame. In practice,
the influence of MDAV
+
on ONA
∗
is very limited, as sit-
uations in which MDAV
∗
returns large clusters are very
rare.
Concerning reassignment, ONA
∗
makes a more
precise estimation (line 22). Whereas ONA bases its
decision, whether and where to move an element x,
on the distances to centroids, ONA
∗
compares the ac-
tual costs before and after a change.
A final modification simplifies matters substan-
tially. Every cluster in step 21 of ONA has between
2k and 3k − 1 elements and should be divided into
2 parts. For this task ONA is not likely to find bet-
ter solutions than MDAV algorithms, but requires more
time and works probabilistically. Hence, we have
replaced the recursive execution of ONA by a call to
MDAV
∗
which first creates 2 clusters with exactly k el-
ements on opposite sides of the global centroid and
afterwards assigns remaining elements to their clos-
est cluster which is likely to yield an optimal solution
in this special case. A complete description of ONA
∗
is given as Algorithm 3.
To evaluate the improvements by replacing ONA
with ONA
∗
, we have performed several benchmarks
on established benchmark sets (see Table 1 and Ta-
ble 4). The best out of 100 ONA runs is able to out-
perform MDAV
∗
in most of the tests. With bigger k, the
percental difference between MDAV
∗
and ONA becomes
larger. Compared to MDAV
∗
, ONA
∗
is able to lower the
information loss in all test cases with improvements
ranging from 2% for Cloud1 and k = 2 to 31% for EIA
and k = 10. The average improvement from MDAV
∗
to
ONA
∗
is 11% over all experiments. While the average
improvement from ONA to ONA
∗
is just 3% over all
experiments, its deterministic behaviour takes much
lower runtime.
To determine the time complexity of ONA
∗
con-
sider its basic building blocks and let ζ be the number
of repetitions until convergence. There are at most
n/k clusters C
i
of size k which might be dissolved in
phase 1. For each element s of such a cluster its clos-
est centroid j(s) can be found in time O(n/k d). For
each cluster C
i
evaluating the cost function for it and
the at most k neighbours C
j(s)
takes time O(k
2
d).
Splitting a cluster C
`
by MDAV
∗
requires O(|C
`
|
2
d)
time. Each cluster C
i
can give rise to at most k splits
of a cluster C
`
of size less than 3k, which adds up
Scalable k-anonymous Microaggregation: Exploiting the Tradeoff between Computational Complexity and Information Loss
91

Algorithm 3: ONA
∗
.
input : database X and min cluster size k
output: k-member clustering C
1 Let C = {C
1
,.. . ,C
m
} ← MDAV
∗
(X, k)
// Split large clusters
2 foreach C ∈ C do
3 if |C| ≥ 2k then
4 C ← C \{C}; C ← C ∪MDAV
+
(C,k)
5 repeat
// Phase 1: dissolving clusters
6 foreach C
i
∈ C with |C
i
| = k do
7 For s ∈C
i
let C
j(s)
be the cluster with the
closest centroid to s in C \{C
i
}
8 Let L ←{j(s) : s ∈C
i
}
9 Let C
0
`
←C
`
∪{s ∈C
i
: j(s) = `}, for each
` ∈ L
10 Let Cost
1
← Cost(C
i
) +
∑
`∈L
Cost(C
`
)
11 Let Cost
2
←
∑
`∈L
Cost(C
0
`
)
12 if Cost
1
> Cost
2
then
13 C ←{C
0
`
: ` ∈L}∪{C
`
: ` 6∈(L∪{i})}
// Split large clusters
14 foreach ` ∈ L do
15 if |C
`
| ≥ 2k then
16 C ← C \{C
`
}
17 C ← C ∪MDAV
∗
(C
`
,k)
// Phase 2: reassigning elements
18 foreach C
i
∈ C with |C
i
| > k do
19 repeat
20 foreach s ∈C
i
do
21 Let C
j(s)
be the cluster with the
closest centroid to s among
those in C \C
i
22 Let improvement(s) ←
(Cost(C
i
) −Cost(C
i
\{s})) −
(Cost(C
j(s)
∪{s})−Cost(C
j(s)
))
23 Let s
0
← argmax
s∈C
i
improvement(s)
24 if improvement(s
0
) ≤ 0 then
25 break
26 else
27 C
i
←C
i
\{s
0
}
28 C
j(s
0
)
←C
j(s
0
)
∪{s
0
}
// Split large clusters
29 if |C
j(s
0
)
| ≥ 2k then
30 C ← C \{C
j(s
0
)
}
31 C ← C ∪MDAV
∗
(C
j(s
0
)
,k)
32 until |C
i
| = k
33 until convergence condition
to O(k
3
d) computational effort. Thus the total time
of phase 1 can be bounded by n/k ·(k ·O(n/k d) +
O(k
2
d + k
3
d)) = O((n
2
/k + n k
2
) d) .
For phase 2 one has to consider less than n/k
clusters of size between k + 1 and 2k − 1. The
loop starting in line 19 is executed less than k
times. In each execution, again for each ele-
ment s of a cluster to compute its closest cen-
troid and its improvement takes time O(n/k d) and
O(k d) respectively. Now there can be at most
one split adding time O(k
2
d). Hence, per cluster
O(n k d) + O(k
3
d) time is needed. All together this
gives an upper bound n/k ·(O(n k d) + O(k
3
d)) =
O((n
2
+ n k
2
) d) for phase 2.
If the time O(n
2
d) for the initialization by MDAV
∗
is added we finally get
Lemma 1. If ONA
∗
needs ζ iterations till conver-
gence its runtime is bounded by O((n
2
+ ζ (n
2
+
n k
2
)) d).
To establish a time bound for ONA seems to be
more difficult. The time used for random initial-
ization can be considered linear in n, a reassign-
ment check takes time O(n/k d) and a dissolve check
O((n + k
2
) d). Iterating over n elements this already
adds up to O((n
2
+ nk
2
) d). This has to be multi-
plied by the number ζ of executions of the main loop
till convergence and furthermore by the number µ of
probabilistic repetitions The correct time bound may
even be larger because in this calculation the recursive
splitting has been ignored for which an analysis does
not seem to be obvious.
4 MICROAGGREGATION IN
ALMOST LINEAR TIME
In 2006 LeFevre et al. introduced MONDRIAN,
an anonymization algorithm which achieves k-
anonymity in O(nlog n) time (LeFevre et al., 2006).
The optimization goal of MONDRIAN is to create clus-
ters with cluster sizes as close to k as possible.
Algorithm 4: MONDRIAN (LeFevre et al., 2006).
input : database X and min cluster size k
output: k-member clustering C
1 if |X | < 2k then
2 return X
3 Let dim ←
argmax
j∈{1,...,d}
max
x
i
∈X
x
j
i
−min
x
i
∈X
x
j
i
4 Let median ← median({x
dim
i
| x
i
∈ X})
5 Let lhs ←
/
0; Let rhs ←
/
0
6 foreach x
i
∈ X do
7 if x
dim
i
≤ median then
8 lhs ←lhs ∪{x
i
}
9 else
10 rhs ←rhs ∪{x
i
}
11 return MONDRIAN(lhs,k) ∪ MONDRIAN(rhs, k)
SECRYPT 2021 - 18th International Conference on Security and Cryptography
92
Table 1: Comparison of quadratic time microaggregation algorithms on the benchmark databases for different values of k. For
ONA the best result out of 100 runs is stated, ONA
∗
, MDAV and MDAV
∗
are run only once as they are deterministic.
Information Loss in % on Census
k = 2 k = 3 k = 4 k = 5 k = 7 k = 10
MDAV 3.18 5.69 7.49 9.09 11.60 14.16
MDAV
∗
3.17 5.78 7.44 8.81 11.37 14.01
ONA 3.44 5.47 6.92 8.16 10.08 12.45
ONA
∗
3.06 5.26 6.81 7.99 10.07 12.46
Information Loss in % on Tarragona
k = 2 k = 3 k = 4 k = 5 k = 7 k = 10
MDAV 9.33 16.93 19.55 22.46 27.52 33.19
MDAV
∗
9.44 16.14 19.19 22.25 28.40 34.75
ONA 9.19 15.01 17.66 20.88 26.50 30.95
ONA
∗
9.06 15.11 17.79 20.69 26.34 31.15
Information Loss in % on EIA
k = 2 k = 3 k = 4 k = 5 k = 7 k = 10
MDAV 0.31 0.48 0.67 1.67 2.17 3.84
MDAV
∗
0.22 0.45 0.62 0.91 2.03 2.63
ONA 0.21 0.40 0.59 0.81 1.60 2.01
ONA
∗
0.20 0.37 0.52 0.79 1.63 1.99
Information Loss in % on Cloud1
k = 2 k = 3 k = 4 k = 5 k = 7 k = 10
MDAV 1.21 2.22 3.74 4.31 5.70 7.05
MDAV
∗
1.16 2.11 3.65 4.09 5.54 6.70
ONA 1.21 2.16 3.18 3.82 4.97 6.35
ONA
∗
1.15 2.02 3.25 3.92 5.07 6.28
Information Loss in % on Cloud2
k = 2 k = 3 k = 4 k = 5 k = 7 k = 10
MDAV 0.68 1.21 1.70 2.03 2.69 3.40
MDAV
∗
0.64 1.10 1.52 1.87 2.51 3.28
ONA 0.67 1.08 1.46 1.73 2.28 2.96
ONA
∗
0.60 1.04 1.40 1.70 2.22 2.92
MONDRIAN is not defined as a microaggregation al-
gorithm, but it creates a k-member clustering in the
process of anonymization. Hence, this strategy can
be used to perform k-anonymous microaggregation
by calculating and reporting centroids for each clus-
ter created. However, the question arises, whether the
resulting information loss is comparable to state-of-
the-art heuristics designed to minimize information
loss. We have developed two extensions of MONDRIAN
and compared the resulting runtimes and information
losses to those of the original MONDRIAN algorithm as
well as to MDAV
∗
and ONA
∗
.
The lower time complexity of MONDRIAN is caused
by the fact that no distances between elements are
computed. Instead, MONDRIAN resembles the pro-
cess of sub-dividing a d-dimensional space by d-
dimensional trees. A database is interpreted as a
d-dimensional space with the elements being points
in that space. In the first step, MONDRIAN splits the
database into two clusters by projecting it onto one
of its d dimensions and dividing elements at the me-
dian. Subsequently clusters are divided further, po-
tentially using different splitting dimensions for dif-
ferent (sub)clusters. A cluster is no longer split and
considered final, if a split at the median would result
in at least one new cluster having less than k elements.
Thus, in the final clustering the size of each cluster is
between k and 2k −1.
Choosing a good splitting dimension for each
cluster is a crucial part of the algorithm. Especially
for higher-dimensional data, choosing a less optimal
splitting dimension might result in big and sparsely
populated clusters, resulting in high information loss.
MONDRIAN chooses the splitting dimension for any
cluster as the attribute dimension with widest range
of values in that cluster, a strategy aimed at reducing
the area of clusters as far as possible. A pseudo code
of MONDRIAN is given as Algorithm 4.
As can be seen in Table 6 in the appendix,
MONDRIAN is not able to deliver information loss as
low as ONA or MDAV variants. However, its computa-
tion takes far less time. Its strategy can be interpreted
as acting in rounds of cutting every existing cluster
of size at least 2k into two smaller clusters. There
are O(log n) cutting rounds where every element is
assigned to a new, smaller cluster. Computation of
the splitting dimension is linear in d and n and com-
putation of the median is linear in n. Hence, the total
Scalable k-anonymous Microaggregation: Exploiting the Tradeoff between Computational Complexity and Information Loss
93

time complexity of MONDRIAN is O(n d logn).
Choosing splitting dimensions according to the
widest range rule might be problematic as informa-
tion loss is defined by cluster density rather than
cluster area. We have investigated several alterna-
tive splitting criteria with the same asymptotic time
complexity and come to the conclusion that a signifi-
cant improvement could be achieved by choosing the
splitting dimension as the dimension with the largest
variance of values. Our resulting algorithm called
MONDRIAN V achieves 20% lower information loss on
average over MONDRIAN in the test cases provided in
Table 6. The splitting rule of MONDRIAN V has the
same time complexity of O(nd) and can be formal-
ized as
dim = argmax
j∈{1,...,d}
∑
x
i
∈X
x
j
i
−c(X )
j
2
!
.
The improvement going from MONDRIAN to
MONDRIAN V shows that even for low-dimensional
data, the choice of the right way to cut is quite
important. A natural next step is to increase the
number of options for splits. Up to this point we
have considered cuts according to attribute values
in a single dimension only. The largest possible set
of cuts would be the set of all hyperplanes dividing
the database in two parts with a varying amount of
elements on each side. However, deciding which
splitting hyperplane to choose is a time consuming
process, eliminating the performance gains made by
MONDRIAN V over ONA
∗
.
In MONDRIAN V splits can be interpreted as hy-
perplanes perpendicular to one of the unit vectors
e
1
,. ..,e
d
of the data space R
d
dividing the ele-
ments into two clusters. The second algorithm called
MONDRIAN V2D considers additional splits. We now
also allow hyperplanes that are perpendicular to a
combination e
j
1
j
2
of a pair of unit vectors e
+
j
1
j
2
=
1
√
2
·(e
j
1
+ e
j
2
) and e
−
j
1
j
2
=
1
√
2
·(e
j
1
−e
j
2
). In other
words, we expand the set of possible splits by hyper-
planes which are 45
◦
and 315
◦
between any two unit
vectors. As before, splits are made at the median of
the dimension (or combination of dimensions) with
largest variance. Note that, by the prefactor
1
√
2
we en-
sure measuring variances in an orthonormal basis re-
sulting in values comparable to those measured along
original dimensions.
The number of possible splits for any given cluster
increases from d to 2·
d
2
+d = d
2
since there are
d
2
pairs of dimensions to choose from and two orienta-
tions for each pair together with the d options to cut
along a single dimension as before. The time com-
plexity of MONDRIAN V2D increases to O(nd
2
logn),
but information loss further decreases by 6% on av-
erage on the Adult data set (low-dimensional data)
and by 25% on average on the Credit Card data
set (higher-dimensional data). A pseudo code for
MONDRIAN V2D is given as Algorithm 5.
Of course, one could extend this further and take
combinations of 3 or more unit vectors increasing the
time bound by additional factors of d. However, the
largest gain seems to be the step from 1 to 2 dimen-
sions.
Algorithm 5: MONDRIAN V2D.
input : database X and min cluster size k
output: k-member clustering C
1 if |X | < 2k then
2 return X
3 Let
(dim1,dim2,o) ← argmax
j
1
, j
2
∈{1,...,d},o∈{−1,1}
∑
x
i
∈X
1
√
2
·
x
j
1
i
+ o ·x
j
2
i
4 Let median ← median({x
dim1
i
+ o ·x
dim2
i
| x
i
∈ X})
5 Let lhs ←
/
0; Let rhs ←
/
0
6 foreach x
i
∈ X do
7 if x
dim
i
≤ median then
8 lhs ←lhs ∪{x
i
}
9 else
10 rhs ←rhs ∪{x
i
}
11 return MONDRIAN V2D(lhs,k) ∪
MONDRIAN V2D(rhs,k)
5 COMBINING ONA
∗
AND
MONDRIAN V
As can be seen in Table 6, no MONDRIAN variant can
compete with MDAV* or ONA* with respect to infor-
mation loss. How can one still get the best of both
worlds? We propose to combine both methods, the
fast one at the beginning to split large clusters and
the one of better quality for a fine grained clustering
of small clusters, and name this MONA. The combina-
tion is flexible governed by a parameter ρ that can be
chosen between 0 and 1. It defines the switch from
MONDRIAN V to ONA
∗
: clusters of size larger than n
ρ
are iteratively split by MONDRIAN V, smaller ones are
then handled by ONA
∗
. Thus, we get a family of algo-
rithms MONA
ρ
, where MONA
0
equals MONDRIAN V and
MONA
1
is identical to ONA
∗
. The code of MONA
ρ
is de-
scribed in Algorithm 6. Analogously the algorithm
MONA 2D
ρ
combines MONDRIAN V2D and ONA
∗
.
Since ONA* has quadratic time complexity, but is
only applied to a bunch of smaller datasets, the to-
tal runtime in the ONA*-phase is reduced. Further-
more, most computation of MDAV or ONA variants is
SECRYPT 2021 - 18th International Conference on Security and Cryptography
94
0.3
0.35
0.4
0.45
0.5
0.55
0.6
0.65
0.7
0.75
0.8
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Information Loss in %
Split limit exponent ρ
MONDRIAN_V MONDRIAN_V2D ONA* MONA MONA_2D
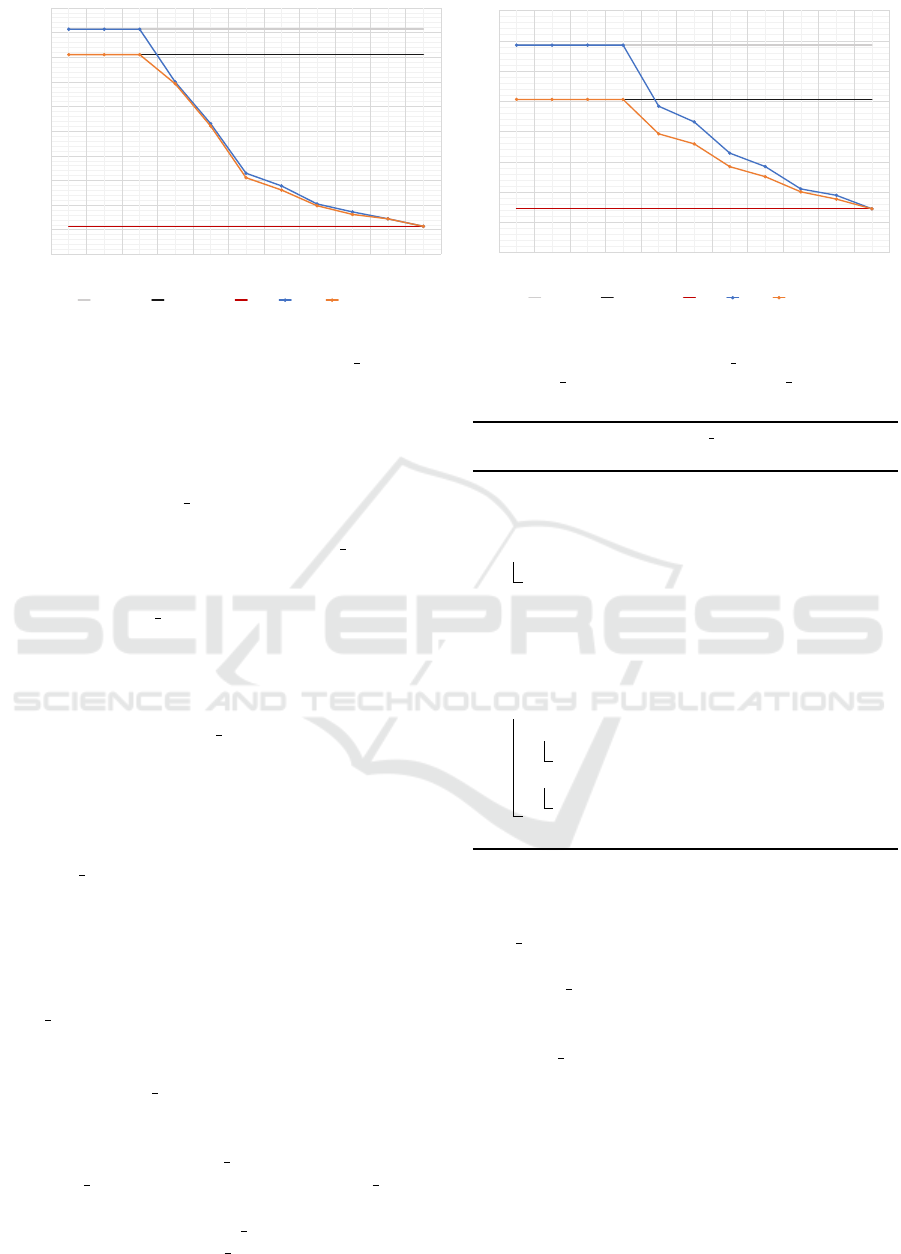
(a) Adult database: n = 48842, d = 3, k = 10.
5.0
10.0
15.0
20.0
25.0
30.0
35.0
40.0
45.0
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Information Loss in %
Split limit exponent ρ
MONDRIAN_V MONDRIAN_V2D ONA* MONA MONA_2D
(b) Credit Card database: n = 30000, d = 24, k = 10.
Figure 2: Information Losses of MONA and MONA 2D for different split limits compared to MONDRIAN V variants and ONA
∗
on
two different databases. As n
ρ
< 2k for small values of ρ, both MONA and MONA 2D behave like their MONDRIAN V counterparts.
due to distance calculations between far apart ele-
ments. But this has little influence on the local ar-
rangements of elements. Thus, saving these estima-
tions in the MONDRIAN V-phase does not increase the
information loss much. Still, there might occur a
decrease of data quality in the MONDRIAN V-phase if
ONA* would have clustered elements together that lie
on both sides of the median of a splitting dimension
used by MONDRIAN V and now are assigned to differ-
ent subproblems. However, for larger datasets such
cases can be expected to have only a small influence.
In the ONA*-phase MONA
ρ
has to manage O(
n
/n
ρ
) =
O(n
1−ρ
) instances with input size n
ρ
at most. The
runtime of the MONDRIAN V-phase is obviously not
larger than a complete run of this algorithm. Hence,
the total time complexity of MONA
ρ
can be bounded by
O(nd log n) + O
n
1−ρ
·O((n
2ρ
+ ζ(n
2ρ
+ n
ρ
k
2
))d)
= O(nd log n) + O((n
1+ρ
+ ζ(n
1+ρ
+ nk
2
))d) .
For MONA 2D
ρ
the first term gets an additional factor
d. For ρ > 0 the first term is majorized by the second.
If k is small compared to n, which for larger databases
typically holds, and ζ is considered as a constant we
get
Lemma 2. For 0 < ρ ≤ 1 the runtime of MONA
ρ
and
MONA 2D
ρ
is bounded by O(n
1+ρ
d).
The information loss of both algorithms for differ-
ent ρ are shown in Figure 2. Additionally, runtimes
for MONA and MONA 2D on Credit Card are listed in Ta-
ble 5.
To give a more complete overview of the perfor-
mance of MONA
ρ
and MONA 2D
ρ
, in Table 6 MONA
0.5
and MONA 2D
0.5
are compared to MONDRIAN V and
ONA
∗
on Adult and Credit Card. It can be ob-
served that MONA
0.5
and MONA 2D
0.5
deliver better re-
sults than pure MONDRIAN V approaches. On the
Algorithm 6: MONA
ρ
(MONDRIAN V combined with
ONA
∗
, split limit n
ρ
).
input : database X , min cluster size k and split
limit n
ρ
output: k-member clustering C
1 if |X | < n
ρ
then
2 return ONA
∗
(X, k)
3 Let
dim ← argmax
j∈{1,...,d}
∑
x
i
∈X
x
j
i
−c(X)
j
2
4 Let median ← median({x
dim
i
| x
i
∈ X})
5 Let lhs ←
/
0; Let rhs ←
/
0
6 foreach x
i
∈ X do
7 if x
dim
i
≤ median then
8 lhs ←lhs ∪{x
i
}
9 else
10 rhs ←rhs ∪{x
i
}
11 return MONA(lhs,k, n
ρ
) ∪ MONA(rhs,k,n
ρ
)
low-dimensional database Adult, MONA
0.5
is in reach
of quadratic time algorithms like ONA
∗
whereas
MONA 2D
0.5
is not able to improve much compared to
MONA
0.5
. On the higher dimensional database Credit
Card, MONA 2D
0.5
achieves a notable improvement to
MONA
0.5
. However, both have higher information loss
than the quadratic time algorithms. But compared to
MONDRIAN V the improvement is significant.
6 CONCLUSION
The contribution of this paper is threefold. The ONA-
approach has been optimized and transformed into a
deterministic variant that works considerably faster
and is at least as good as ONA w.r.t. information loss,
Scalable k-anonymous Microaggregation: Exploiting the Tradeoff between Computational Complexity and Information Loss
95

according to the evaluation by standard benchmarks.
Further, the clustering algorithm MONDRIAN has
been adapted to perform well in microaggregation ap-
plications. Two variants, namely MONDRIAN V and
MONDRIAN V2D have been presented, both delivering
superior information loss compared to MONDRIAN and
operating at different ratios of performance to data
quality. For lower-dimensional data the MONDRIAN
technique can achieve almost the same data quality
as much more time consuming algorithms.
Combining both advantages, the data quality
of ONA
∗
and the performance of MONDRIAN V, we
have designed new classes of algorithms MONA
ρ
and
MONA 2D
ρ
that achieve high quality data anonymiza-
tion even for huge databases where quadratic time
would be far too expensive.
What could be the next steps in further improv-
ing microaggregation techniques? An obvious ques-
tion is whether there are even better splitting rules
for MONDRIAN? On the other hand, is it possible
to decrease the information loss further by spending
more than quadratic time? By design, any improve-
ment here could be applied to the MONA
ρ
approach
to get fast solutions with better quality. How well
k-anonymous microaggregation can be approximated
is still wide open. There is hope to achieve approxi-
mation guarantees for ONA
∗
by carefully designing an
initial clustering similar to the k-means++ algorithm
(Arthur and Vassilvitskii, 2007). We plan to investi-
gate this issue in more detail.
REFERENCES
Anwar, N. (1993). Micro-aggregation-the small aggregates
method. Technical report, Internal report. Luxem-
bourg: Eurostat.
Arthur, D. and Vassilvitskii, S. (2007). k-means++: The
advantages of careful seeding. In Proceedings of the
eighteenth annual ACM-SIAM symposium on Discrete
algorithms, pages 1027–1035. Society for Industrial
and Applied Mathematics.
Defays, D. and Nanopoulos, P. (1993). Panels of enterprises
and confidentiality: the small aggregates method. In
Proceedings of the 1992 symposium on design and
analysis of longitudinal surveys, pages 195–204.
Domingo-Ferrer, J., Mart
´
ınez-Ballest
´
e, A., Mateo-Sanz,
J. M., and Seb
´
e, F. (2006). Efficient multivariate
data-oriented microaggregation. The VLDB Jour-
nal—The International Journal on Very Large Data
Bases, 15(4):355–369.
Domingo-Ferrer, J. and Mateo-Sanz, J. M. (2002).
Reference data sets to test and compare sdc
methods for protection of numerical microdata.
https://web.archive.org/web/20190412063606/http:
//neon.vb.cbs.nl/casc/CASCtestsets.htm.
Domingo-Ferrer, J. and Torra, V. (2005). Ordinal, continu-
ous and heterogeneous k-anonymity through microag-
gregation. Data Mining and Knowledge Discovery,
11(2):195–212.
Dwork, C., McSherry, F., Nissim, K., and Smith, A. (2006).
Calibrating noise to sensitivity in private data analy-
sis. In Theory of cryptography conference, pages 265–
284. Springer.
LeFevre, K., DeWitt, D. J., and Ramakrishnan, R.
(2006). Mondrian multidimensional k-anonymity. In
22nd International conference on data engineering
(ICDE’06), pages 25–25. IEEE.
Li, N., Li, T., and Venkatasubramanian, S. (2007).
t-closeness: Privacy beyond k-anonymity and l-
diversity. In 2007 IEEE 23rd International Confer-
ence on Data Engineering, pages 106–115. IEEE.
Li, N., Qardaji, W., and Su, D. (2012). On sam-
pling, anonymization, and differential privacy or, k-
anonymization meets differential privacy. In Pro-
ceedings of the 7th ACM Symposium on Information,
Computer and Communications Security, pages 32–
33. ACM.
Lichman, M. (2013). UCI machine learning repository.
http://archive.ics.uci.edu/ml.
Lloyd, S. P. (1982). Least squares quantization in pcm.
IEEE transactions on information theory, 28(2):129–
137.
Machanavajjhala, A., Kifer, D., Gehrke, J., and Venkita-
subramaniam, M. (2007). l-diversity: Privacy beyond
k-anonymity. ACM Transactions on Knowledge Dis-
covery from Data (TKDD), 1(1):3.
Oganian, A. and Domingo-Ferrer, J. (2001). On the com-
plexity of optimal microaggregation for statistical dis-
closure control. Statistical Journal of the United Na-
tions Economic Commission for Europe, 18(4):345–
353.
Rebollo-Monedero, D., Forn
´
e, J., Pallar
`
es, E., and Parra-
Arnau, J. (2013). A modification of the Lloyd algo-
rithm for k-anonymous quantization. Information Sci-
ences, 222:185–202.
Samarati, P. (2001). Protecting respondents identities in mi-
crodata release. IEEE transactions on Knowledge and
Data Engineering, 13(6):1010–1027.
Soria-Comas, J., Domingo-Ferrer, J., and Mulero, R.
(2019). Efficient near-optimal variable-size microag-
gregation. In International Conference on Modeling
Decisions for Artificial Intelligence, pages 333–345.
Springer.
Sweeney, L. (2002). k-anonymity: A model for protecting
privacy. International Journal of Uncertainty, Fuzzi-
ness and Knowledge-Based Systems, 10(05):557–570.
Thaeter, F. and Reischuk, R. (2018). Improving anonymiza-
tion clustering. In Langweg, H., Meier, M., Witt,
B. C., and Reinhardt, D., editors, SICHERHEIT 2018,
pages 69–82, Bonn. Gesellschaft f
¨
ur Informatik e.V.
Thaeter, F. and Reischuk, R. (2020). Hardness of
k-anonymous microaggregation. Discrete Applied
Mathematics.
SECRYPT 2021 - 18th International Conference on Security and Cryptography
96

APPENDIX
Benchmarks
The Census database contains 13 numerical attributes and 1080 elements. It was created using the Data Extraction
System of the U.S. Bureau of Census in 2000. Tarragona contains 13 numerical attributes and 834 elements. It
contains data of the Spanish region Tarragona from 1995. The EIA data set consists of 15 attributes and 4092
records. As in previous works (see e.g. (Domingo-Ferrer et al., 2006)) only a subset of 11 attributes precisely 1
and 6 to 15 have been used. Cloud1 and Cloud2 have been created using statistics from AVHRR images. These
databases are commonly used for the training and evaluation of machine learning algorithms, and both contain
1024 elements with 10 attributes each. Adult consists of 48842 elements with 14 attributes. As for EIA, only
a subset of numerical attributes namely age, education number and hours per week is used. This particular
selection was suggested in (Rebollo-Monedero et al., 2013). It is used to test subquadratic algorithms on low-
dimensional data. The Credit Card clients data set consists of 30000 elements in 24 numeric attributes. It contains
inputs and predictive results from six data mining methods and is used to evaluate subquadratic algorithms on
higher-dimensional data.
Experimental Results
Table 2: Statistics of the consistency of outputs on 1000 ONA executions on the Census benchmark database for different k.
The information loss of MDAV
∗
is included for reference. Information losses (IL) are stated in percentages.
ONA on Census MDAV
∗
on Census
lowest IL highest IL median mean variance IL
k = 2 3.43 3.90 3.63 3.63 0.01 3.17
k = 3 5.42 6.24 5.70 5.71 0.01 5.78
k = 4 6.94 7.74 7.25 7.25 0.02 7.44
k = 5 8.12 9.10 8.47 8.48 0.02 8.81
k = 7 10.04 11.11 10.43 10.44 0.03 11.37
k = 10 12.36 13.66 12.77 12.80 0.04 14.01
Table 3: Statistics of the consistency of outputs on different numbers of ONA executions on the Census benchmark database
for k = 10. The runtime and information loss of MDAV
∗
is included for reference. As MDAV
∗
is deterministic, it is run only
once.
ONA on Census for k = 10 MDAV
∗
on Census
lowest IL highest IL median mean variance runtime IL runtime
10 runs 12.54 13.00 12.74 12.76 0.02 1s 14.01 0s
100 runs 12.41 13.39 12.79 12.80 0.04 9s 14.01 0s
1000 runs 12.36 13.66 12.77 12.80 0.04 100s 14.01 0s
Table 4: Comparison of quadratic time microaggregation algorithms on the EIA benchmark database for different values of
k. For ONA the total runtime for 100 runs is stated, ONA
∗
and MDAV
∗
are run only once as they are deterministic.
Runtime on EIA
k = 2 k = 3 k = 4 k = 5 k = 7 k = 10
MDAV
∗
2s 1s 1s 0s 0s 0s
ONA 162s 255s 138s 327s 41s 36s
ONA
∗
2s 1s 1s 1s 0s 0s
Scalable k-anonymous Microaggregation: Exploiting the Tradeoff between Computational Complexity and Information Loss
97

Table 5: Runtimes of MONA
ρ
and MONA 2D
ρ
for different ρ and k on Credit Card. Compare with information losses stated in
Figure 2b.
Runtime on Credit Card
k = 2 k = 3 k = 4 k = 5 k = 7 k = 10
MONA
0.3
0s 0s 0s 0s 0s 0s
MONA
0.4
0s 0s 0s 0s 0s 0s
MONA
0.5
1s 0s 0s 0s 0s 0s
MONA
0.6
4s 2s 2s 2s 1s 1s
MONA
0.7
8s 5s 4s 4s 3s 3s
MONA
0.8
33s 24s 19s 16s 13s 11s
MONA
0.9
67s 48s 39s 37s 30s 25s
MONA
1
306s 226s 174s 146s 123s 101s
MONA 2D
0.3
2s 1s 1s 1s 1s 1s
MONA 2D
0.4
2s 1s 1s 1s 1s 1s
MONA 2D
0.5
2s 2s 2s 1s 1s 2s
MONA 2D
0.6
5s 3s 3s 2s 2s 2s
MONA 2D
0.7
8s 6s 5s 4s 4s 4s
MONA 2D
0.8
34s 24s 20s 18s 14s 12s
MONA 2D
0.9
70s 49s 42s 37s 31s 25s
MONA 2D
1
309s 216s 176s 146s 124s 98s
Table 6: Comparison of several microaggregation algorithms on benchmarks Adult with d = 3 and Credit Card with d = 24.
Information Loss in % on Adult
k = 2 k = 3 k = 4 k = 5 k = 7 k = 10
MDAV
∗
0.04 0.09 0.14 0.18 0.28 0.42
ONA
∗
0.04 0.08 0.12 0.16 0.24 0.36
MONDRIAN 0.25 0.51 0.51 0.51 0.92 0.92
MONDRIAN V 0.21 0.41 0.41 0.41 0.76 0.76
MONDRIAN V2D 0.19 0.38 0.38 0.38 0.71 0.71
MONA
0.5
0.05 0.11 0.16 0.21 0.32 0.46
MONA 2D
0.5
0.05 0.10 0.16 0.21 0.30 0.46
Information Loss in % on Credit Card
k = 2 k = 3 k = 4 k = 5 k = 7 k = 10
MDAV
∗
3.65 6.44 8.48 10.21 12.36 14.68
ONA
∗
3.50 5.86 7.53 8.64 10.23 12.24
MONDRIAN 30.33 30.33 41.47 41.47 43.75 50.71
MONDRIAN V 24.05 24.05 32.54 32.54 34.12 39.27
MONDRIAN V2D 15.81 15.81 21.93 21.93 23.23 27.34
MONA
0.5
7.74 12.56 15.99 18.53 22.45 26.59
MONA 2D
0.5
6.87 10.96 13.89 16.16 19.50 22.95
Runtime on Adult
k = 2 k = 3 k = 4 k = 5 k = 7 k = 10
MDAV
∗
211s 141s 89s 77s 50s 40s
ONA
∗
538s 358s 267s 218s 163s 116s
MONDRIAN 0s 0s 0s 0s 0s 0s
MONDRIAN V 0s 0s 0s 0s 0s 0s
MONDRIAN V2D 0s 0s 0s 0s 0s 0s
MONA
0.5
1s 0s 0s 0s 0s 0s
MONA 2D
0.5
1s 0s 0s 0s 0s 0s
Runtime on Credit Card
k = 2 k = 3 k = 4 k = 5 k = 7 k = 10
MDAV
∗
223s 158s 120s 95s 78s 61s
ONA
∗
292s 209s 174s 145s 123s 106s
MONDRIAN 0s 0s 0s 0s 0s 0s
MONDRIAN V 0s 0s 0s 0s 0s 0s
MONDRIAN V2D 1s 1s 1s 1s 1s 1s
MONA
0.5
1s 0s 0s 0s 0s 0s
MONA 2D
0.5
2s 2s 2s 1s 1s 2s
SECRYPT 2021 - 18th International Conference on Security and Cryptography
98
