
Innovative Robot Design for Cleaning Solar Panels
Abderrahim Chellal
1,4 a
, Jos
´
e Lima
1,2 b
, Ana Isabel Pereira
1,5 c
and Paulo Costa
2,3 d
1
Research Centre of Digitalization and Intelligent Robotics CeDRI, Instituto Polit
´
ecnico de Braganc¸a, Braganc¸a, Portugal
2
Robotics and Intelligent Systems Research Group, INESC TEC, Porto, Portugal
3
Faculty of Engineering of the University of Porto, DEEC, Porto, Portugal
4
Higher School in Applied Sciences of Tlemcen, Tlemcen, Algeria
5
ALGORITMI Center, University of Minho, Braga, Portugal
Keywords:
Robotics, Automation and Mechatronics, Solar Energy, Data Analytics and Simulation, Digital Image
Processing, Efficiency Increase.
Abstract:
The accumulation of dust particles on the solar panels decrease the total amount of solar energy received by
the Photovoltaic panel (PV) and, it has also been proven that the increase of temperature reduces the overall
efficiency. These effects have been studied by different researchers based on collected data comparison. As
both of these parameters have a negative effect on the efficiency of the solar panel, it is essential to keep them
clean and at low temperatures. The use of technologies, such as robots, is an effective way of carrying out
repetitive tasks at low cost and in a short time. This work consists of developing a robot capable of cleaning and
cooling the solar panels, based on images acquired through a camera positioned directly towards the panels,
thus maintaining periodic cleaning in order to increase its efficiency. The preliminary results demonstrate the
possibility of using this approach for the accomplishment of this task.
1 INTRODUCTION
Renewable energy plays an important role in the en-
ergy sector by replacing limited resources such as
oil and coal with abundant natural resources. One
of the most popular of these renewables is solar en-
ergy. Solar energy is radiant energy emitted by the
sun and harnessed by photovoltaic panels. It offers
various advantages over other available renewable en-
ergy sources, but suffers from several drawbacks.
The photovoltaic module is a set of cells connected to
each other in series and/or parallel, which produces a
current and a voltage when exposed to the sun. (Cam-
pana et al., 2013). Environmental factors such as tem-
perature, wind and rain greatly influence the reliabil-
ity and efficiency of solar panels and represent one
of the major problems of this technology. It has also
been shown that the accumulation of dust particles
significantly reduces the overall efficiency, especially
in desert areas, but not only.
a
https://orcid.org/0000-0002-9190-6865
b
https://orcid.org/0000-0001-7902-1207
c
https://orcid.org/0000-0003-3803-2043
d
https://orcid.org/0000-0002-4846-271X
During long periods without rain, such as the summer,
dust accumulation can lead to daily losses of over
20%. (Zorrilla-Casanova et al., 2011), these losses
lead to a substantial decrease in the overall efficiency
of photovoltaic systems.
Figure 1 shows dirty and clean solar panels.
Figure 1: Dirty and clean Solar panels (JKB Energy, 2018).
The effect of dust accumulation on solar cells
varies with location and has been studied by a number
of researchers. In (Christian et al., 2015) It is revealed
that a 20% drop in efficiency was observed on photo-
voltaic panels installed in Freiburg, Germany, within
5 months of heavy soiling of the glass surface. In
264
Chellal, A., Lima, J., Pereira, A. and Costa, P.
Innovative Robot Design for Cleaning Solar Panels.
DOI: 10.5220/0010540102640270
In Proceedings of the 11th International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH 2021), pages 264-270
ISBN: 978-989-758-528-9
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
the Algerian Sahara desert, it was found that the effi-
ciency of solar panels decreased by 32% after only 6
months without any cleaning operation. (Mostefaoui
et al., 2019). In these cases, regular cleaning of the
modules is necessary. It is strongly recommended
that, when weather conditions are not extreme, the
photovoltaic panels are cleaned 3 to 4 times a year,
and this number should increase during dry periods.
Usually this is done regularly by human operators, but
it is time-consuming and, more importantly, gener-
ates additional operating costs ranging from C1000 to
C4500/MW depending on the region. (Stridh, 2012).
The objective of this paper is to propose a method-
ology, based on simulation, that describes an efficient
and economical way to perform this repetitive, time-
consuming and costly task by using robots in an inno-
vative way, through the use of a camera, giving the
robot autonomy and greater work efficiency. This
document is divided into seven sections. The first
section presents the overview of the work. The sec-
ond section promotes the work already done in this
area, followed in section 3, by a brief description of
the overall system architecture. The environment and
the simulation of the model are presented in section 4
where the robot simulation software is described. The
fifth section introduces in general the algorithms ap-
plied in the different software, while the sixth section
highlights the results obtained, and finally ends with
a conclusion and future work.
2 RELATED WORK
Some reported automatic systems were proposed in
the literature to solve the dust accumulation issue
through robots. In (Ronnaronglit and Maneerat,
2019) a freely moving robot is suggested: it can go
in any direction and is able to climb a maximum of
20° slope inclination. In (Anderson et al., 2010), a
two part rail guided robot is designed, it consist of a ”
Drive System” that moves horizontally along the top
and bottom edges of the solar panel, and a ” Cleaning
Head ” that is driven vertically by cables.
In (Aravind et al., 2014) the proposed system is
made up of two sub-system, a robot cleaner and an
automated carrier cart, while the robot clean the PV
panel surface, the carries moves along side.
In (Sundaram et al., 2019) The focus was on the
concept of a robot that could be installed in any solar
farm, easy to use and particularly easy to transport. A
market survey and patent analysis on the use of Solar
cleaning robots is presented in (Grando et al., 2019),
which offers a general view of different approach and
technologies involved and commercialized.
In (Hashim et al., 2019) The proposed strategy al-
lows both monitoring of solar irradiation and cleaning
of the photovoltaic surface when necessary through a
camera mounted directly on the robot, under the con-
trol of a mobile application that also collects the data.
Another cleaning strategy using a camera was also
proposed in (Li et al., 2016), where a mapping frame-
work was developed using a Kinect V2 as an RGB-D
sensor.
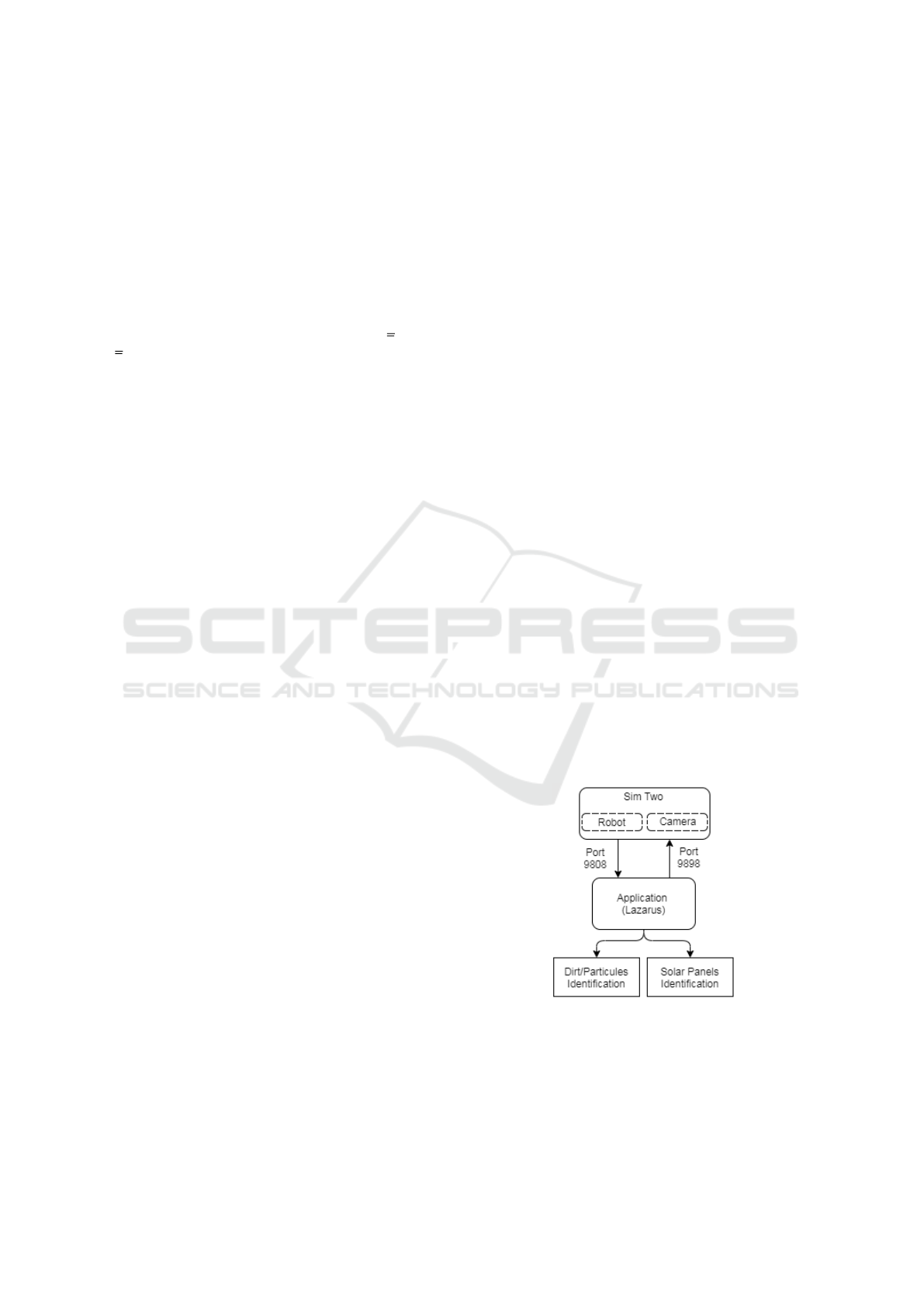
3 SYSTEM ARCHITECTURE
The system architecture is based on two components,
the SimTwo software, where the robot is fully sim-
ulated, and a processing application developed on
Lazarus Software, a cross-platform IDE for applica-
tion development. These two platforms communicate
with each other using the User Datagram Protocol
(UDP). Camera image is compressed on jpeg format
and sent by port 9808 from SimTwo to the application
whereas on the opposite way, the SimTwo will receive
commands on port 9898 to control the motors.
The use of SimTwo is justified by the need to per-
form the simulation of the robot while Lazarus is used
to develop an application capable of processing the
image acquired by the camera in the SimTwo soft-
ware and controlling the robot. The application con-
sists of the analysis of the image, the determination
of the location and edges of the solar panels and the
exact coordinates of the dust on them, this will be fur-
ther discussed afterwards.
Figure 2 shows the main architecture of the pro-
posed system.
Figure 2: System Architecture.
The same approach is to be used in a real scenario,
replacing the SimTwo simulation environment block
with the real robot and camera. In this case, the cam-
era will send data directly to the application, and the
robot will communicate with the application via WiFi
Innovative Robot Design for Cleaning Solar Panels
265
or another network, depending on the infrastructure.
4 ENVIRONMENT AND MODEL
SIMULATION
SimTwo is a realistic mobile robot simulation soft-
ware with a multiple window interface that can sup-
port several types of robots with dynamic capability
(Gonc¸alves et al., 2013) and it is useful for devel-
opment and testing purposes. It is strongly recom-
mended to create the robot model with dimensions,
positions and part masses very close to the real parts,
since the dynamics will be calculated based on these
characteristics and it is desired that it behaves like a
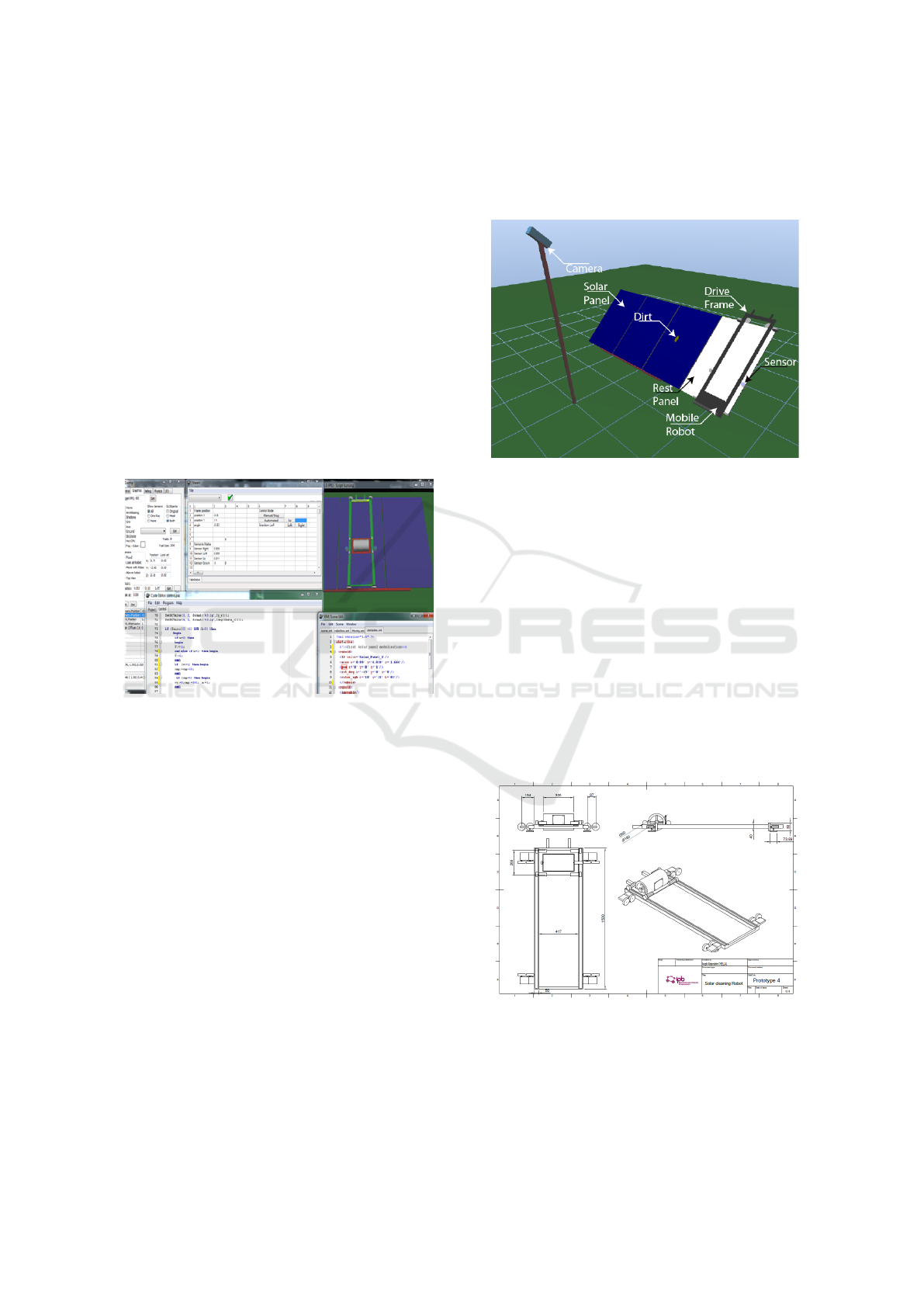
real situation. Figure 3 represents an overview of the
different interface of the software.
Figure 3: SimTwo software - General view.
In this section, it will be discussed how the devel-
opment of the scene environment on the software was
carried out, firstly by modelling the solar panels pre-
sented in the CeDRI facilities, and next, by modeling
the main parts of the cleaning robots, which are the
frame and the mobile robot. The robot’s look and be-
havior are defined in several XML format files and are
implemented in the ”scene editor” window. The main
scene file (scene.xml) defines the different sub-robot
parts incorporated in the main robot and their specific
construction file. The robot parts are defined by sev-
eral solids (cuboid and cylinder) connected through
joints and articulations (slider and hinge). These
joints are parts of the shell elements since they are
solids without mass and do not modify the robot’s
physical properties, but are an essential part of the
collision simulation (Costa et al., 2011). The move-
ment occurs through a guide rails, called drive frame,
fixed in the edges of the solar panel, allowing a fluid
movement of the mobile robot and giving it the possi-
bility of mounting a steeply sloping panel. The drive
frame should be manufactured using aluminium al-
loy, offering moderate strength, good formability and
is suitable for welding (Aravind et al., 2014). Figure
4 presents the designed model on the software.
Figure 4: SimTwo Software - Robot and Solar panels.
Different models have been designed, but the two-
axis model with rails is the best solution. Allowing
the robot to glide over the panel with small wheels
offers less resistance, reducing the battery capacity,
which significantly reduces the weight and price. A
total of four position sensors are used to provide in-
formation about the position of both the frame and
robot. Two of them, continuously checks if the frame
reaches the edges of the solar panel and two others
check for the mobile robot if it reaches the upper and
lower limits.
A model was made using the FUSION 360 soft-
ware, allowing a better understanding of its shape.
The proposed parts, designed on this CAD software,
are presented in Figure 5.
Figure 5: Robot Prototype design.
Fusion360 is a software developed by the com-
pany AUTODESK, it is a very complete software,
particularly easy to use and efficient to make com-
puter assisted drawings.
The four drive wheels must be assembled in pairs,
SIMULTECH 2021 - 11th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
266
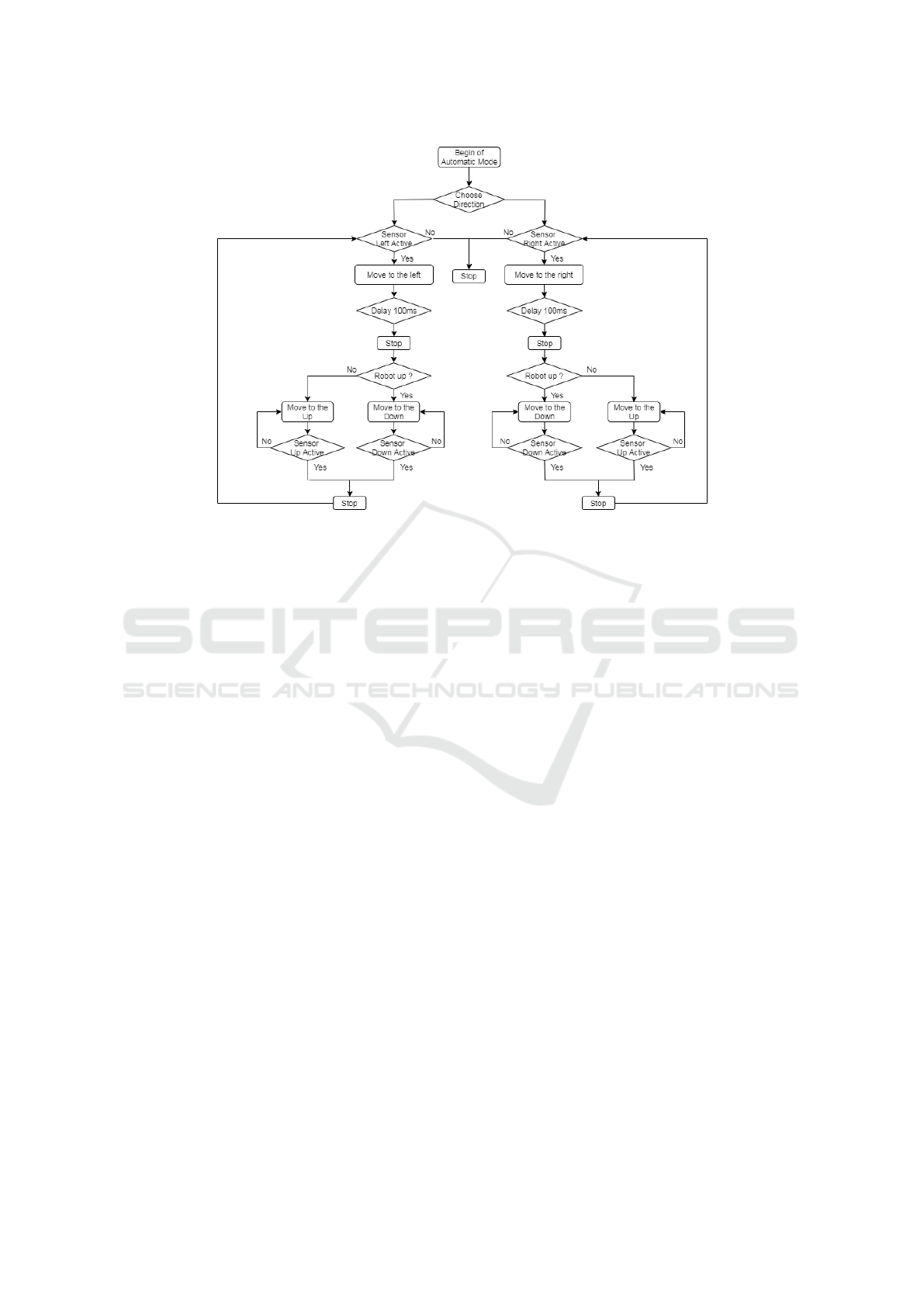
Figure 6: Automatic mode flowchart.
each pair of wheels must be connected to the other by
a chain that allows only one motor to be used, which
ensures that there will always be at least one drive
wheel in contact with the edge when crossing the gaps
between the panels. (Anderson et al., 2010).
5 CONTROL ALGORITHMS
The software offers the possibility of implementing
the algorithm in a script in Pascal language, capable
of managing the movement of the robot while per-
forming the cleaning. It also allows to choose be-
tween three modes: manual mode, partial automatic
mode and full automatic mode, as well as the direc-
tion of movement. These different modes will be de-
tailed in the next sub-sections.
5.1 Manual & Partial Automatic Mode
The manual mode is the simplest one where the robot
follows the commands transmitted by pressing the
corresponding button (right, left, up, down), a more
in-depth discussion of it, is therefore unnecessary.
The automatic mode repeats continuously the
same loop, as it can be seen in Figure 6, the robot
check its position first and decide which way to
move, assuming that the horizontal movement of the
frame to the left is the first step of the operation. The
second step of the cycle would be the robot moving
vertically upwards, the 180 mm diameter brush is
activated and moves in a circular motion using DC
motors. The frame then moves to the left, towards the
next cleaning area, the robot then starts the descent
until it reaches the lowest point. These loops are
repeated until the end of the solar panels array is
reached. When the cycle is finished, the robot stops
and wait for instructions.
5.2 Fully Automated Mode
The fully automated mode involves the analysis of
the panels by a front mounted camera. The acquired
image, is regularly sent with a format of 319 horizon-
tal pixels × 220 vertical pixels and is processed pixel
by pixel in the developed application. The application
first determines the number of panels installed, their
boundaries and their respective positions, and then
highlights them with a red line.
Next, the algorithm checks the RGB (red, green,
blue) colour variation of each pixel included in the
solar panel and when a significant amount changes,
the algorithm records it as a dust particle, highlights
it with a green line, identifies the position of this
particle (X, Y and panel number) and assigns it a
specific number (starting from 1). Then the algorithm
continues to scan the rest of the panels for other dust
particles or any other type of particles such as urban
pollution, leaves, pollen, bird droppings. If another
one is found, the algorithm records its corresponding
coordinates and assigns it the next number, like a
Region Labelling algorithm. Figure 7 shows the
Innovative Robot Design for Cleaning Solar Panels
267
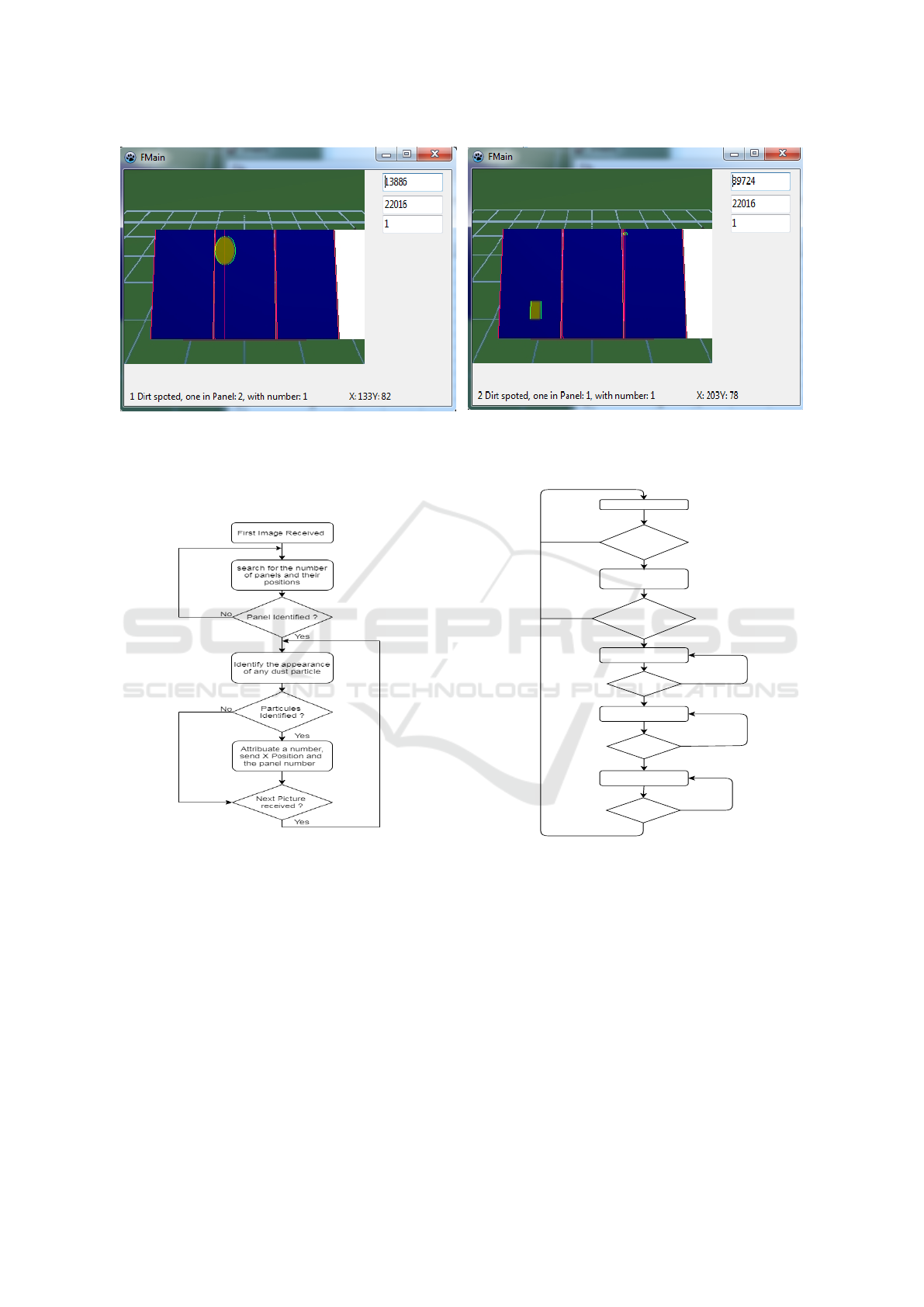
Figure 7: Application interface - Camera Picture.
application interface.
Figure 8 shows the processing algorithm flowchart
implemented on the software as described previously.
Figure 8: Picture processing flowchart.
The particle coordinates are sent to the SimTwo
software and the fully automated algorithm imple-
mented on the simulated robot moves the drive frame
to the corresponding ”X” position and then moves
the mobile robot upwards. The cleaning action is
simulated using a paint tool implemented on the
software that changes the colour of the dirt particles
into the original background colour. As it moves,
the mobile robot cleans the part of the solar panel it
is passing through, changing its colour. The mobile
robot then moves downwards while the driving frame
moves to the resting position in the resting panel,
waiting for further instructions. Figure 9 represents
the fully automatic mode flowchart implemented in
the software.
The
position corresponds
with the panel
number
No
Convert the
equivalent position to
the real position
Dirt
particule position
Received
Stand-by
Yes
No
Move to position "X"
"X"
reached ?
No
Yes
Move to the upper
solar panel position
Position
reached ?
Move to the rest
position
No
Position
reached ?
No
Yes
Yes
Yes
Figure 9: Fully automated mode flowchart.
It is possible to control and debug the algorithm
using the ”spreadsheet” window since this window is
fully customisable and allows the direct display of the
value of variables (sensors, motor states) and the ad-
dition of buttons (Stop and Automatic, for example).
The purpose of the software part of the project is to
control the simulated hardware of the system, includ-
ing the mechanical components. In general, in a real
case, small microcontrollers such as the well-known
ATMEGA328P are preferred in such a system, as the
control algorithm can easily be implemented on them
(Akyazi et al., 2019).
SIMULTECH 2021 - 11th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
268
6 RESULTS
The SimTwo software has a chart plotting window
which is used in this section, as it offers the possibil-
ity to plot the robot’s properties at any given time (for
example: position, speed, consumption and orienta-
tion). During cleaning, using the automatic mode, the
frame on the panel moves half the width of the panels
to the left (decreasing the X position) and stops. Sen-
sors on both sides of the frame signal the reach of the
panel’s edge, at which the robot stops. The mobile
robot moves up or down depending on its last posi-
tion, it is made of plastic and will contain the micro-
controller, battery to run the motors, electronics and
will be equipped with a brush.
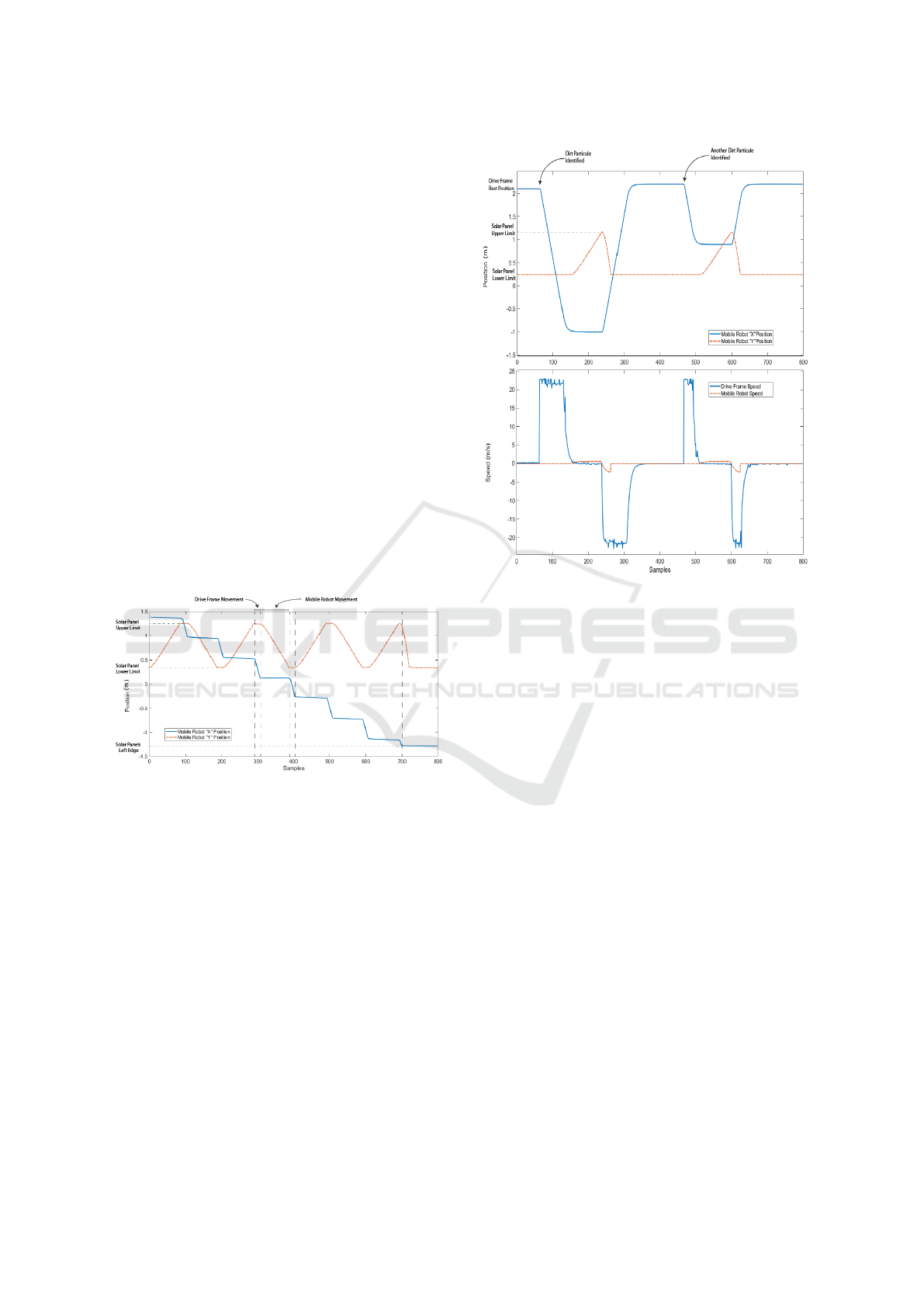
The proposed partial automatic mode has been
tested for a large number of simulations. Figure 10
presents the graphical result of one of the simulations
performed, where the reference position (0,0,0) is lo-
cated in the middle of the second panel, the robot
starts in the rest position, located on the right with
X = 1.5 m. The blue line represents the robots move-
ments in the ”X” axis, while the red dotted line repre-
sents its position in the ”Y” axis.
Figure 10: Mobile robot movement graphic - Automatic
Mode.
The fully automated mode keeps the robot in
standby while the panels are clean, as soon as a dirt
particle is detected by the application, the drive frame
starts to move towards the ”X” coordinates of the
dust particle, once reached the mobile robot starts its
upward movement, the application is able to detect
dirt particles of any shape and size, as can be seen in
Figure 7.
The Figure 11 are shown the evolution of the ”X”
and ”Y” coordinates of the mobile robot, the speed of
the drive frame as it moves towards the ”X” position
and the speed of the mobile robot as it moves towards
the upper part of the solar panel.
The robot movement is controlled with the use
of a PID (Proportional Integral Derivative) controller
taking as reference the position.
Figure 11: Mobile robot movement graphic - Fully Auto-
mated Mode.
The proposed approach based on simulation al-
lows to validate the methodology both in image pro-
cessing and robot control.
7 CONCLUSION AND FUTURE
WORK
As the earth is in the midst of an energy transition, it
is essential to be able to provide an efficiency that is,
or tends to be, qualitatively equal to that of conven-
tional electricity generation. With this proposed de-
sign, the main concerns about dust accumulation on
PV panels can be effectively addressed, avoiding un-
necessary losses to these panels, which can be as high
as 20%.
This paper proposed a mobile robot that was able
to perform the assigned cleaning of dirt whatever is
the panel’s slope. It is important to the robot to move
independently of the slope since it vary with location.
Each mode developed is suitable for a specific case:
the automatic mode can be used after storm or heavy
soiling of the panels, while the full automatic mode
is used for a day by day maintenance. The results
performed on the software algorithm and on the sim-
ulated robot allowed to validate the approach.
Further development will optimize the system to
Innovative Robot Design for Cleaning Solar Panels
269

be smaller, lighter, more user-friendly and focus on its
implementation on the real hardware with the devel-
opment alongside of a digital twin. The experiments
with a real robot will address an RGB camera as well
as a thermal camera in order to optimize the cleaning
process with a sensor fusion algorithm. A docking
station for the robot is also equated to charge the bat-
teries of the robot and increase its autonomy.
ACKNOWLEDGEMENTS
This work is financed by National Funds through
the Portuguese funding agency, FCT - Fundac¸
˜
ao
para a Ci
ˆ
encia e a Tecnologia within project
UIDB/50014/2020.
REFERENCES
Akyazi,
¨
O., S¸ahin, E.,
¨
Ozsoy, T., and Alg
¨
ul, M. (2019).
A solar panel cleaning robot design and application.
Avrupa Bilim ve Teknoloji Dergisi, pages 343–348.
Anderson, M., Grandy, A., Hastie, J., Sweezey, A., Ranky,
R., Mavroidis, C., and MARKOPOULOS, Y. P.
(2010). Robotic device for cleaning photovoltaic
panel arrays. In Mobile Robotics: Solutions and Chal-
lenges, pages 367–377. World Scientific.
Aravind, G., Vasan, G., Kumar, T. G., Balaji, R. N., and
Ilango, G. S. (2014). A control strategy for an au-
tonomous robotic vacuum cleaner for solar panels. In
2014 Texas Instruments India Educators’ Conference
(TIIEC), pages 53–61. IEEE.
Campana, P. E., Li, H., and Yan, J. (2013). Dynamic mod-
elling of a pv pumping system with special considera-
tion on water demand. Applied energy, 112:635–645.
Christian, S., Stefan, B., and Michael, K. (2015). Impact
of soiling on iv-curves and efficiency of pv-modules.
Solar Energy, 112:259–262.
Costa, P., Gonc¸alves, J., Lima, J., and Malheiros, P. (2011).
Simtwo realistic simulator: A tool for the develop-
ment and validation of robot software. Theory and
Applications of Mathematics & Computer Science,
1(1):17–33.
Gonc¸alves, J., Lima, J., Costa, P. J., and Moreira, A. P.
(2013). Modeling and simulation of the emg30 geared
motor with encoder resorting to simtwo: the official
robot@ factory simulator. In Advances in Sustainable
and Competitive Manufacturing Systems, pages 307–
314. Springer.
Grando, M. T., Maletz, E. R., Martins, D., Simas, H., and
Simoni, R. (2019). Robots for cleaning photovoltaic
panels: State of the art and future prospects. Revista
Tecnolog
´
ıa Y Ciencia, (35):137–150.
Hashim, N., Mohammed, M., Selvarajan, R. A., Al-
Zubaidi, S., and Mohammed, S. (2019). Study on so-
lar panel cleaning robot. In 2019 IEEE International
Conference on Automatic Control and Intelligent Sys-
tems (I2CACIS), pages 56–61. IEEE.
JKB Energy, . (2018). Get your system cleaned & running
properlys. https://www.jkbenergy.com/blog/2018/4/
30/get-your-system-cleaned-running-properly.
Li, M., Zhang, M., Fu, Y., Guo, W., Zhong, X., Wang,
X., and Chen, F. (2016). Fast and robust mapping
with low-cost kinect v2 for photovoltaic panel clean-
ing robot. In 2016 International Conference on Ad-
vanced Robotics and Mechatronics (ICARM), pages
95–100. IEEE.
Mostefaoui, M., Ziane, A., Bouraiou, A., and Khelifi1, S.
(2019). Effect of sand dust accumulation on pho-
tovoltaic performance in the saharan environment:
southern algeria (adrar). Environmental Science and
Pollution Research, 26(1):259–268.
Ronnaronglit, N. and Maneerat, N. (2019). A cleaning robot
for solar panels. In 2019 5th International Confer-
ence on Engineering, Applied Sciences and Technol-
ogy (ICEAST), pages 1–4. IEEE.
Stridh, B. (2012). Evaluation of economical benefit of
cleaning of soiling and snow in pv plants at three eu-
ropean locations. In 2012 38th ieee photovoltaic spe-
cialists conference, pages 001448–001451. IEEE.
Sundaram, M., Prabhakaran, S., Jishnu, T., and Sharma, S.
(2019). Design and analysis of an autonomous clean-
ing robot for large scale solar pv farms. In Proc. Int.
Conf. Autom. Control, Mechtron. Ind. Eng., page 265.
Zorrilla-Casanova, J., Piliougine, M., Carretero, J.,
Bernaola, P., Carpena, P., Mora-L
´
opez, L., and de Car-
dona, M. S. (2011). Analysis of dust losses in
photovoltaic modules. In World Renewable Energy
Congress-Sweden; 8-13 May; 2011; Sweden, number
057, pages 2985–2992.
SIMULTECH 2021 - 11th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
270
