
An Effective Method for Data Processing of Inertial Measurement Units
Applied to Embedded Systems
Christoph Kolhoff
a
and Markus Kemper
ZME-Institute, UAS Diepholz (PHWT), Th
¨
uringer Str. 3a, Diepholz, Germany
Keywords:
Bias Error, Gauss-Markov Process, MEMS Error Model.
Abstract:
Autonomous functions for navigation and localization have piqued the attention and interest in many fields of
science and engineering as automotive, aviation and robotics. Desiring high quantity of autonomous products,
the used components are requested to be cheap. This often lead engineers or developers to apply micro-
electromechanical systems that exhibit large errors. To use these sensors anyway, the acquired data must be
processed online for error reduction. Hence there is a need for an algorithm that is easy to compute. The
aim of this research is to develop a generic algorithm based on a Gauss-Markov process representing the
drifting bias that can be parametrized easily and performs well on real-time systems. Therefore, the error
model imitates the sensor’s output and removing the errors afterwards. Finally, a validation of the suggested
algorithm is performed by comparing processed data of the micro-controller to data processed a posteriori on
a high-performance computer.
1 INTRODUCTION
Autonomous functions are designed to make deci-
sions based on data acquired from sensors without any
human assistance. In foreseeable future autonomous
devices are purposed to take tasks in various sections
of daily life which requires a large large amount of
several accurate sensor data. The commonly used
sensors deliver those precise data but they lead to high
costs of the final product. For for low-cost robotic
systems on customer markets the used sensors are re-
quested to be cheap on the one hand and have to pro-
vide data with small errors on the other hand. Hence,
micro-electromechanical systems (MEMS) are the
point of interest in many cases. These kind of sen-
sors exhibit large tolerances and wide ranges of er-
rors as shown in (Kolhoff et al., 2021). In (Titterton
and Weston, 2004) an error model for triaxial IMUs is
given to describe the connectedness between the real
and the measured values. This model contains both,
repeatable (e.g. misalignment, scaling errors, static
bias) and non repeatable (e.g. noise) effects. Looking
at (Titterton and Weston, 2004), it is recommended
to compensate only repeatable errors by applying the
chosen error model. Processing stochastic effects is
not considered by this approach. Acquired data have
to be processed in ”real time” to improve their quality
a
https://orcid.org/0000-0002-7880-8152
and to reduce errors which leads to the need for suffi-
cient algorithms. Concerning automotive application,
inertial measurement units (IMUs) consisting of ac-
celerometers and gyroscopes are focused to determine
the relevant properties of the vehicle’s actual motion.
To take account of these requirements, the mathemat-
ical structure of the sensor’s behavior has to be known
to be able to develop an algorithm for data processing.
Therefore, an easy model containing misalignment,
constant and drifting bias, noise and nonlinear effects
in triads of sensors is given by (Kuncar et al., 2018).
Additionally, in (Gebre-Egziabher, 2004) some meth-
ods are presented to identify the needed parameters
easily. As a further important requirement, the model
is not just purposed to be parametrized for only one
specific sensor, but for an entire class of sensors. In
this paper the bias is the focused kind of error because
of its long-time drift characteristics.
In known applications the static component of the
bias is considered only and therefore the entire bias
cannot be compensated completely. Especially when
an integration over time is performed (e.g. by deter-
mining the orientation from the angular velocity), the
resulting errors rise very quickly with time as shown
in (Ramalingam et al., 2009). To design an algorithm
meeting these requirements, the drift of the sensor’s
bias is approximated by a first order Gauss-Markov
process (GM) for a single axis, referring to (Gebre-
558
Kolhoff, C. and Kemper, M.
An Effective Method for Data Processing of Inertial Measurement Units Applied to Embedded Systems.
DOI: 10.5220/0010540705580565
In Proceedings of the 18th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2021), pages 558-565
ISBN: 978-989-758-522-7
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Figure 1: Autonomous ”People-Mover”-Project at UAS
Diepholz.
Egziabher, 2004). In addition to this, the model is
extended by integrating the drifting bias and the al-
gorithm is implemented on a micro-controller after-
wards. Finally, the processed data of the micro-
controller are compared to the same data filtered by
the suggested algorithm on a high-performance com-
puter. It is shown that the mentioned errors are
strongly reduced by the suggested algorithm and the
algorithm is sufficient to operate on real-time sys-
tems. At UAS Diepholz, an fully autonomous low-
cost ”People-Mover” is developed. Figure (1) shows
a photograph while testing sensor systems. The car is
based on an e.Go-Cart and is equipped with sensors
and actuators for self-driving modes. The maximum
speed is 25 to 45 kilometers per hour. Hence, in this
paper, an effective method for data processing of Iner-
tial Measurement Units for the application in low-cost
autonomous systems is proposed.
2 THEORETICAL BACKGROUND
2.1 Generic Error Model for IMUs
The considered sensors exhibit various kinds of er-
rors. Referring to (Titterton and Weston, 2004) a
generic error model for triads of accelerometers and
gyroscopes is denoted in (1) connecting the vector of
measured values
˜
x and real values x. The model con-
tains errors, e.g. due to misalignment represented by
the matrix M.
˜
x = M · x + x
b
+ x
p
+ x
nl
(1)
This type of error is caused by faulty assembling of
the sensor on the one hand and a lack of orthogo-
nality of the three sensing axes of the IMU resulting
from imperfections in the production process on the
other hand. This is depicted in Figure 2. The acceler-
ations and angular velocities appear along the solid
axes which are aligned orthogonally to each other.
x
2
x
1
x
3
Figure 2: Misalignment of the sensor’s axes.
The sensor measures values along the dashed axes.
Due to the non-orthogonal alignment of the IMU’s
axes the measured values contain amounts of the val-
ues of all solid axes and therefore they appear as linear
combinations of all solid axes’ values. Another rea-
son for this behavior is a fault of sensitivity of each
axis caused by errors in the production process. El-
ements of the major diagonal differing from a value
of one represent errors in sensitivity of the respec-
tive axis. This is caused by the inclination of the
dashed axes to the solid axes. Furthermore, the in-
clination leads to the fact that values measured along
the dashed axes contain amounts of values that are
measured along the other two solid axes. This is rep-
resented by the minor diagonal elements of M which
have commonly small magnitudes (Unsal and Demir-
bas, 2012). The measured values in this case lead to
the assumption that accelerations and angular veloc-
ities occur on axes of the solid coordinate system in
Figure 2 even if there are none in reality. A further
component of the error model is the bias x
b
. Due to
affection of gravity and imperfections of the internal
structure of the sensor a constant bias x
b,stat
is the first
part of x
b
. Because MEMS have to be powered ex-
ternally, the electric conduction causes heating of the
sensor (W
¨
ustling, 1997). Due to this the internal ge-
ometry of the sensor is diversified and the bias drifts
over time. This is considered by x
b,drift
, the second
part of x
b
. As many other sensors MEMS exhibit
noise x
p
which is assumed as zero-mean white noise
with variance σ
2
w
and a band-limit much higher than
the relevant frequencies. The last type of errors is rea-
soned by nonlinear effects x
nl
that occur at high accel-
erations and angular velocities (W
¨
ustling, 1997).
2.2 Characteristics of the Bias
As mentioned in (Ramalingam et al., 2009) and
(Gebre-Egziabher, 2004) the bias b of a sensor con-
tains a constant component b
0
and a component b
1
varying with time t as shown in (2) for each axis of
An Effective Method for Data Processing of Inertial Measurement Units Applied to Embedded Systems
559

10
0
10
2
f [Hz]
10
-10
10
-5
G( f )
Figure 3: Power spectral density of a Gauss Markov pro-
cess.
the triaxial sensor.
b(t) = b
0
+ b
1
(t) (2)
From the beginning of long-time measured values
the parameter b
0
is determined easily, whereas the
characterization of b
1
is often more challenging. As
shown from experimental data in (Kolhoff et al.,
2021), b
1
can be assumed as exponentially shaped.
Looking at (Gebre-Egziabher, 2004), (Rasmussen and
Williams, 2006) and (Brown and Hwang, 2012), a
very simple method for modeling the drifting bias
with constant ambient temperature is a continuous
first order Gauss-Markov process (GM) g defined by
the differential equation shown in (3).
˙g(t) = −T
−1
c
· g(t) + w
g
with g(0) = 1 (3)
Herein, T
c
is the correlation time of the process and
w
g
is the Gaussian driving process noise with variance
σ
2
g
. The magnitude of the drifting bias is determined
from the end and the beginning of long-time mea-
sured values. Looking at (Brown and Hwang, 2012),
this method is a stationary one fitting well to pro-
cesses that exhibit long correlation times. Due to the
stochastic component the process is not deterministic.
The stochastic component w
g
is neglected at first to
show the general concept of determining T
c
for a de-
noised process. Therefore, the auto-correlation func-
tion (ACF) Φ is computed from denoised g as shown
in (Gelb et al., 2001). The solution is shown in (4)
with its maximum A
2
at time lag τ = 0.
Φ(τ) =
Z
∞
−∞
g(t) · g(t + τ) dt = A
2
· exp(−T
−1
c
· |τ|)
(4)
All correlation values with a time lag different from
zero are smaller than without time lag due to the
ACF’s exponential shape. This results in decreasing
correlation between samples with increasing time lag
(Brown and Hwang, 2012). Concerning (Gelb et al.,
2001), T
c
is identified from a time series of measured
noisy data by the point when the ACF has decayed
to exp(−1) (approximately 36.8 percent) of it’s max-
imum. As to that, when one is able to compensate the
constant and the time-dependent drift of the sensor,
only stochastic effects, scaling errors and cross-axes-
effects will be left.
G( f ) =
2 · A
2
· T
−1
c
(2j · π · f )
2
+ T
−2
c
(5)
A further need to ensure the usability of the GM
for slowly drifting processes is to look at its power
spectral density function (PSD) G with frequency f .
This can be done best by computing the Fourier-
Transformation of its ACF which leads to the PSD
shown in (5), referring to (Lamon, 2018). The corre-
sponding graph is shown in Figure 3 for T
c
= 10 mil-
liseconds and A = 1. When looking at the plot it can
be seen that the GM’s energy is concentrated at low
frequencies. Therefore, this model can be used to de-
scribe processes that differ slowly related to its char-
acteristic values as mentioned in (Brown and Hwang,
2012).
2.3 Moving Average Smoothing
For data smoothing the moving average (MA) method
is introduced in (Hyndman, 2010) and (Smith, 1999).
It computes the average ˆz for a time index l from a
connected set of n values from time series z. There
are two versions to use the moving average. One is
to use the two-sided version which means, that the
set contains data before and after the current time in-
dex that the moving average is computed for. At this,
the number of samples before and after the current
time index can be chosen equally or different, result-
ing in a symmetrically or asymmetrically two-sided
moving average. When concerning real-time appli-
cations, only data from previous points of time can
be used for further processing. This version is called
one-sided moving average, its calculation is shown in
(6). Herein it becomes clear, that the oldest value is
-T
0
t
1/T
weight
Figure 4: Moving Average filter.
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
560
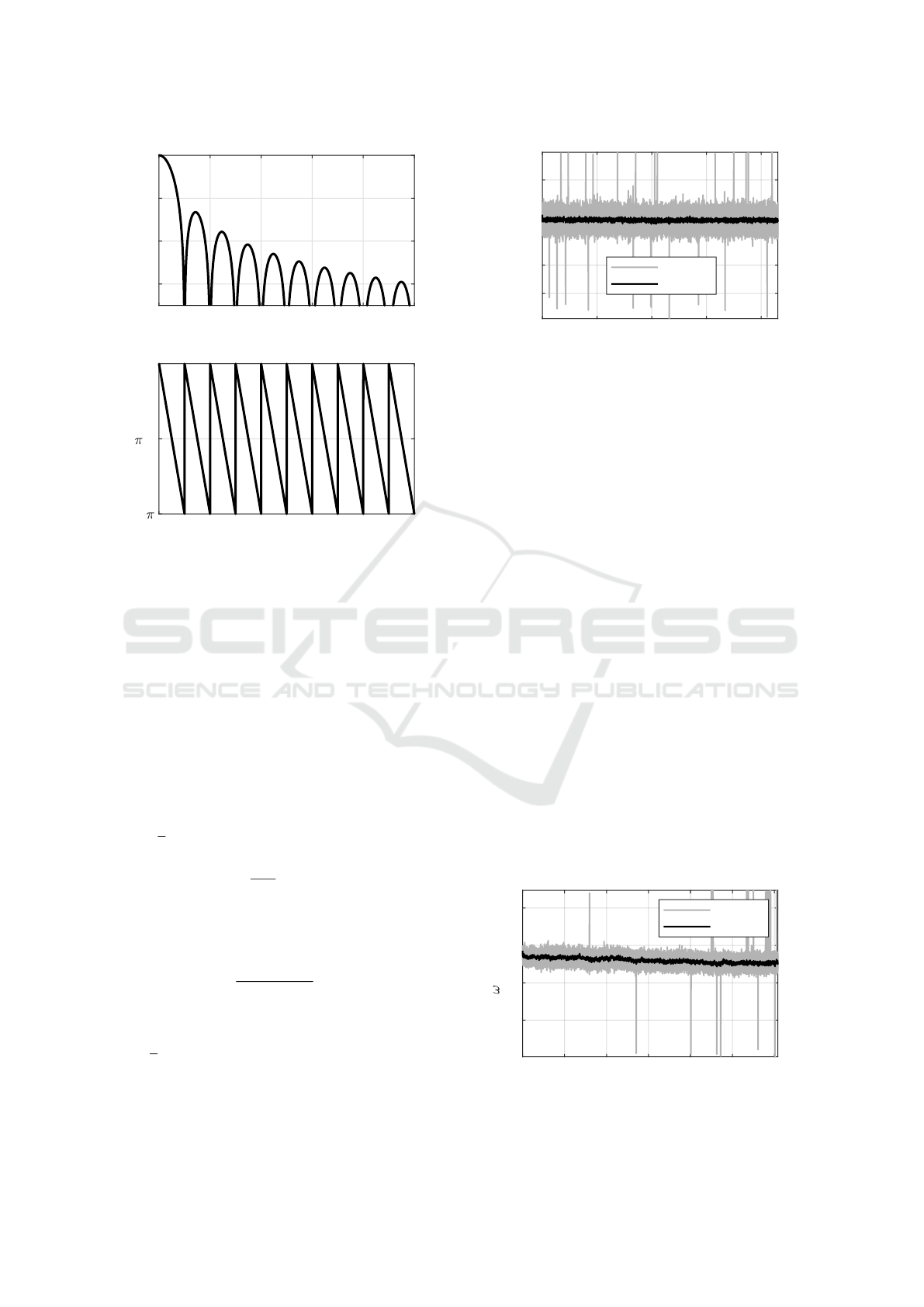
0 200 400 600 800 1000
-30
-20
-10
0
|Z( f )| [dB]
0 200 400 600 800 1000
f [Hz]
-
- /2
0
( f ) [rad]
φ
Figure 5: Bode plot for a Moving Average filter.
dropped and a new one is added to the set before com-
puting the moving average for the new time index.
ˆz(l) =
n−1
∑
k=0
a
k
· z
l−k
, l ∈ [k + 1, n − 1], a
k
= n
−1
(6)
The filter function in continuous time domain is
shown in Figure 4. Due to the computation from past
values, the use of the moving average causes a phase
delay as shown in (Roscoe and Blair, 2016). In com-
mon applications all considered values are weighted
equally so the ideal moving average filter is a Finite
Impulse Response (FIR) filter with duration T and
height
1
T
. Transforming (6) into Laplace domain leads
to (7).
Z(s) =
1
T · s
·
1 − e
−T ·s
(7)
Because the signal’s frequencies f are the point of in-
terest, a substitution s = 2j·π f with the imaginary unit
j is conducted. The result is denoted in (8).
Z( f ) =
sin(π · f · T )
π · f · T
· e
−j·π· f ·T
(8)
It is well-known, that the moving average is a low-
pass filter with zero-transmission at the frequencies
f
n
=
n
T
with n ∈ N. Its magnitude
|
Z ( f )
|
and phase
delay ϕ( f ) are shown in Figure 5 for T = 10 millisec-
onds. This filter can easily be parametrized because
there is only one parameter T to be chose.
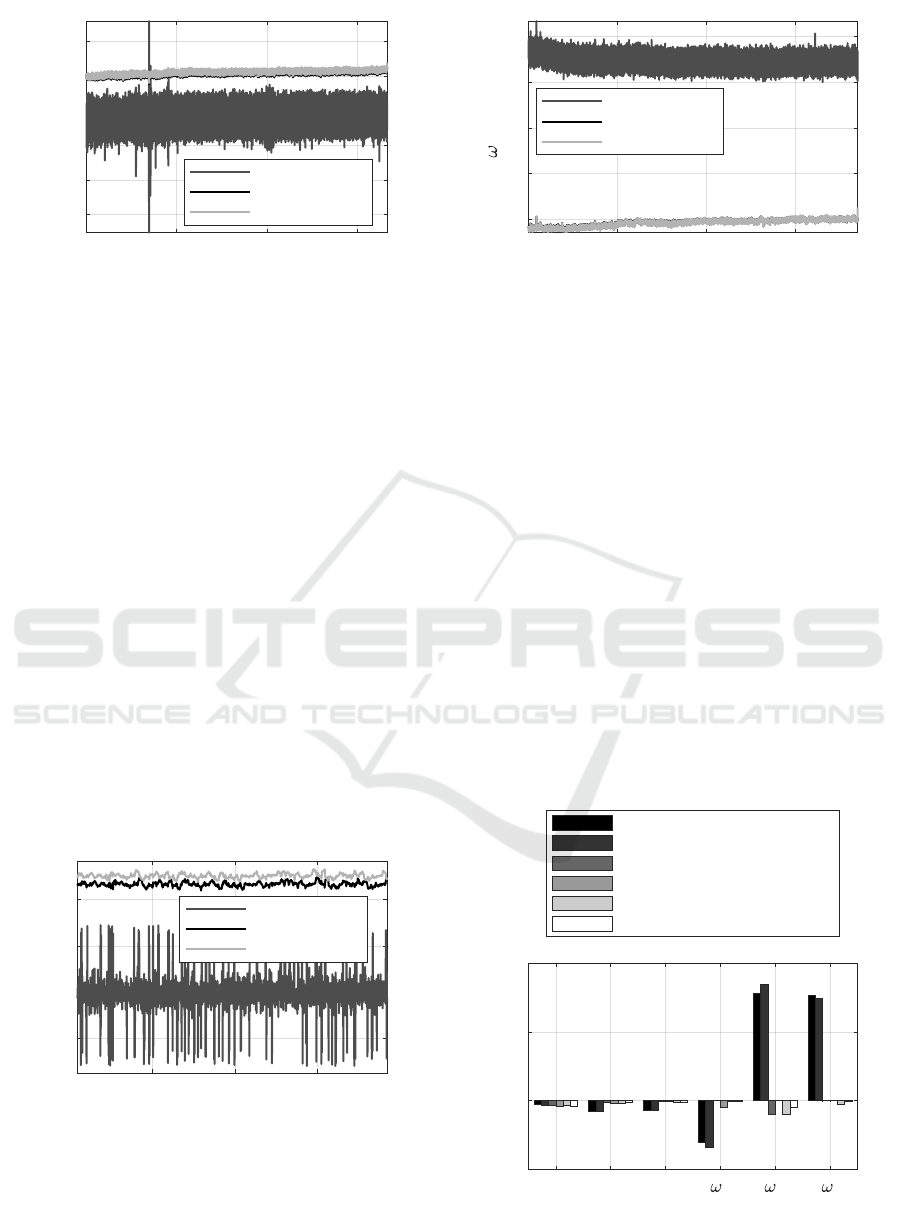
0 200 400 600 800
t [s]
-0.25
-0.2
-0.15
-0.1
-0.05
a
y
[m/s
2
]
raw
denoised
Figure 6: Raw data of the accelerometer.
3 PARAMETRIZE THE ERROR
MODEL AND SUGGEST AN
ALGORITHM FOR ERROR
REDUCTION
To determine the parameters for the suggested error
model data from the IMU is acquired with a sam-
pling frequency of 100 hertz. In first instance, mul-
tiple sets of data from all degrees of freedom are ac-
quired from the resting sensor where the three axes
of the accelerometer are aligned matching, opposing
and orthogonal to gravity. For each set of measure-
ment the temperature at the beginning of the measur-
ing process has to be identically and the IMU has to
cool down after completing each set. Exemplary re-
sults for the accelerometer are shown in Figure 6 and
in Figure 7 for the gyroscope. The example of the
accelerometer shows measured data with the y-axis
aligned orthogonally to gravity, so the expected ef-
fective value is zero. The set of raw data contains a
nearly constant difference between the expected value
and the effective mean of the measured values. This
is the bias which is very lightly drifting on this degree
of freedom. In addition to this raw data is affected
by noise and outliers which occur stochastic in time
0 200 400 600 800 1000 1200
t [s]
1
2
3
4
z
[°/s]
raw
denoised
Figure 7: Raw data of the gyroscope.
An Effective Method for Data Processing of Inertial Measurement Units Applied to Embedded Systems
561

-5 0 5
a
real
[m/s
2
]
-10
-5
0
5
10
a
meas
[m/s
2
]
x-axis
y-axis
z-axis
Figure 8: Characteristic lines of the accelerometer.
and intensity. The example of the gyroscope shows
the presence of noise and a drifting bias but no out-
liers. The raw data is post-processed using a high-
order FIR low-pass filter to reduce the influence of
noise and stochastic outliers, the results are shown in
the respective figures. From all taken sets of measure-
ment the effective values at the beginning of the mea-
suring process (static value) and at the end (asymp-
totic value) are determined, the difference of them is
the drifting bias. From these effective values the ele-
ments of the misalignment matrices and the static and
drifting bias are determined. The variance of the raw
data is determined for all degrees of freedom from the
end of each measured set to characterize the occurring
noise. Because the real noise in combination with out-
liers does not represent the assumed white noise the
computed variance is only a rough approximation of
the real noise’s characteristic value. After the asymp-
totic value is removed from the filtered data, only the
exponentially shaped part remains, the ACF is com-
puted for all degrees of freedom of each set from (4)
and the correlation time is determined. Therefore, the
characteristic values for x
b
and x
p
in (1) have been de-
termined and are shown in Table 1. Because of multi-
ple alignments of the accelerometer’s axes to gravity,
values from -9.81 meters per square second to 9.81
meters per square second are expected. When the de-
-200 -100 0 100 200
real
[°/s]
-200
-100
0
100
200
meas
[°/s]
x-axis
y-axis
z-axis
Figure 9: Characteristic lines of the gyroscope.
Algorithm 1: Error reduction by applying the generic error
model.
1 while process running do
2 for j = 1 to 6 do
3 Acquire ˆx
i, j
4 g
i, j
=
1 −
T
sampl
T
c, j
· g
i−1, j
5 x
b,drift,i, j
= g
i, j
· x
b, drift, j
6 x
temp, j
= ˆx
i, j
− x
b,drift,i, j
− x
b, stat, j
7 Computing Moving Average x
MA
from (6)
8 Solve M · x
i
= x
MA
9 i = i + 1
termined values for the static and drifting bias are re-
moved from the effective values, the elements of the
misalignment matrix M
a
are determined, the charac-
teristic lines for the accelerometer are shown in Fig-
ure 8 and therefore the model has been parametrized
completely for the accelerometer. The process of
parametrization is done analogous. The only differ-
ence consists of the determination of M
ω
. Therefore,
certain angular velocities are applied to all axes of the
gyroscope on a test rig. The characteristic values are
determined form the acquired data as done for the ac-
celerometer, the characteristic lines for the gyroscope
are shown in Figure 9.
4 SUGGESTED METHOD TO
REDUCE THE ERRORS
The novel method for online-processing of raw val-
ues is listed in Algorithm 1 which is explained for a
time index i. For each degree of freedom (index j)
raw data ˆx
i, j
is acquired from the IMU. Here, ˆx
i,1
, ˆx
i,2
Table 1: Determined range of parameters.
Parameter Values Unit
a
b,stat,kk
(k ∈
{
x, y, z
}
) -0.17 – 0.026 m/s
2
a
b,drift,kk
(k ∈
{
x, y, z
}
) -0.002 – 0.018 m/s
2
τ
a,k
(k ∈
{
x, y, z
}
) 50 – 167 s
M
a
major elem. 0.998 – 1.02 -
M
a
minor elem. -0.03 – 0.02 -
σ
a,kk
(k ∈
{
x, y, z
}
) 0.017 – 0.028 m/s
2
ω
b,stat,kk
(k ∈
{
x, y, z
}
) -0.726 – 2.739
◦
/s
ω
b,drift,k
(k ∈
{
x, y, z
}
) -0.115 – 0.347
◦
/s
τ
ω,kk
(k ∈
{
x, y, z
}
) 1030 – 3760 s
M
ω
major elem. 0.97 – 1.003 -
M
ω
minor elem. ≤ 0.001 -
σ
ω,kk
(k ∈
{
x, y, z
}
) 0.01 – 0.013
◦
/s
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
562
0 1000 2000 3000
t [s]
-10
-9.95
-9.9
-9.85
-9.8
-9.75
a
y
[m/s
2
]
raw
online-processed
post-processed
Figure 10: Effect of the algorithm on static bias and scaling
errors.
and ˆx
i,3
are the accelerations in x- y- and z-direction
for the given time index, whereas ˆx
i,4
, ˆx
i,5
and ˆx
i,6
are
the respective angular velocities. In the first step of
processing the value of the respective Gauss-Markov
process g
i, j
is computed. Therefore, (3) is solved us-
ing forward Euler integration as shown in (Quarteroni
et al., 2000) with respect to the sampling time T
sampl
afterward. The stochastic component of (3) is ne-
glected. In the second step, the current value of the
drifting bias x
b,drift,i, j
is determined from the respec-
tive Gauss-Markov process and the parameter x
b, drift, j
determined before. Finally, the static bias x
b, stat, j
and
the current drifting bias are removed from the raw
value to gain a value with only small offset. At next
the vector of MA x
MA
is computed for each degree of
freedom due to damping of noise and outliers. The er-
rors due to misalignment are left only. To reduce these
errors, the linear equation system has to be solved
to remove scaling errors and influences gained from
other axes. All mentioned errors are assumed to be
strongly reduced by now.
500 510 520
t [s]
-0.4
-0.3
-0.2
-0.1
a
z
[m/s
2
]
raw
online-processed
post-processed
Figure 11: Effect of the algorithm on noise and outliers.
0 1000 2000 3000
t [s]
0
1
2
3
4
z
[°/s]
raw
online-processed
post-processed
Figure 12: Performance of the algorithm on drifting bias.
5 EXPERIMENTAL VALIDATION
For the evaluation process Algorithm 1 is imple-
mented onto a micro-controller for all degrees of free-
dom. To ensure that the system is sufficient to operate
under real-time conditions, a 480 megahertz Cortex-
M7 processor with 32-bit architecture is chosen. Raw
and processed data are stored to an external device
directly when the overall set of measurement is com-
pleted. The results for the accelerometer, which are
shown in Figure 10, are discussed first. As it is shown,
the static and asymptotic bias have been strongly re-
duced just as noise and relatively high outliers. In this
example it is shown that the model is valid to reduce
misalignment and static bias errors pretty good. The
remaining error’s magnitude ranges up to 0.03 meters
per square second from the beginning to the end of
the measured set. These errors are denoted in Fig-
ure 13 for all degrees of freedom. The standard de-
a
x
a
y
a
z x y z
degree of freedom
-2
0
2
4
error [m/s
2
or °/s]
initial raw
asymptotic raw
initial processed online
asymptotic processed online
initial processed a posteriori
asymptotic processed a posteriori
Figure 13: Remaining error after processing.
An Effective Method for Data Processing of Inertial Measurement Units Applied to Embedded Systems
563
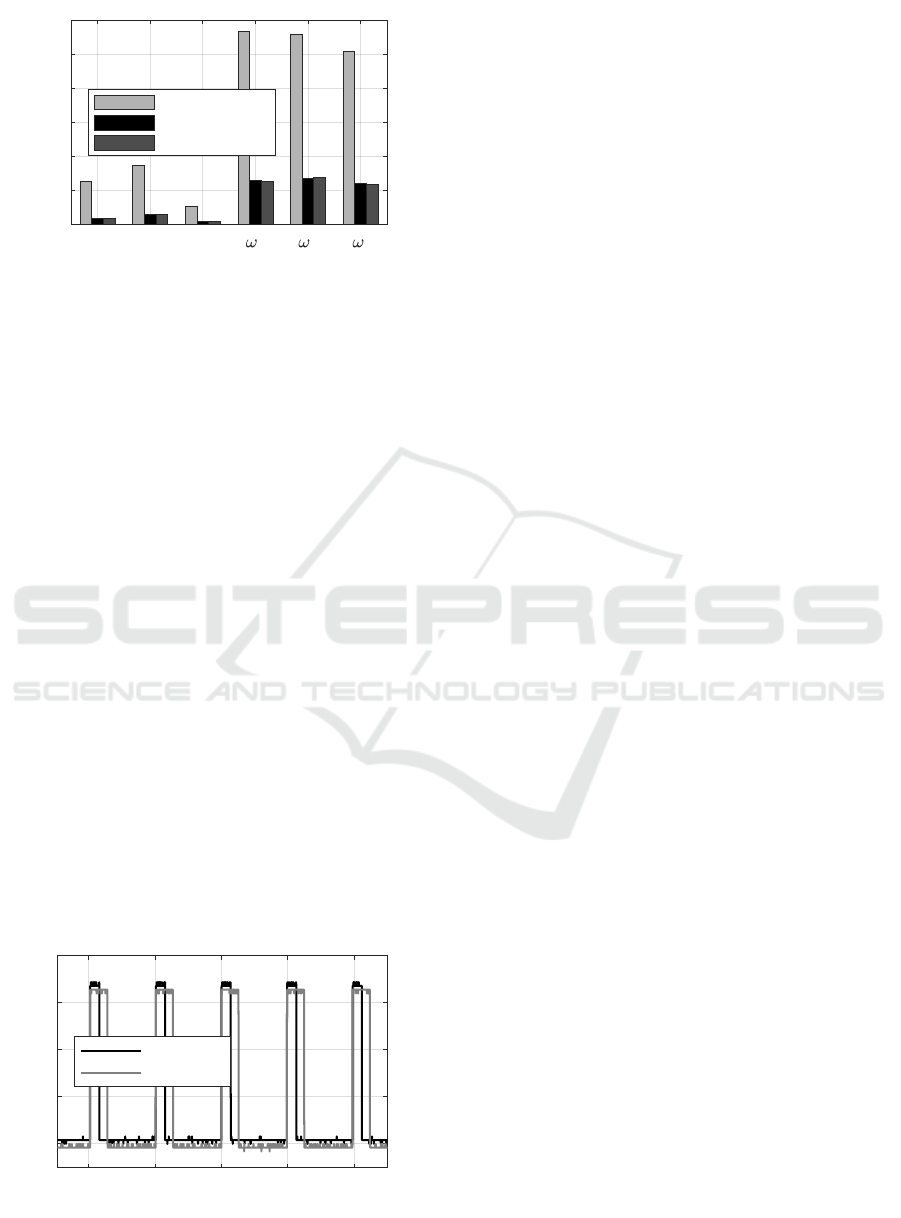
a
x
a
y
a
z x y z
degree of freedom (dof)
0
0.02
0.04
0.06
0.08
0.1
standard deviation [m/s
2
or °/s]
raw
post-processed
online-processed
Figure 14: Reduction of the signal’s standard deviation.
viation of the signal is reduced by a factor of 5.7 as
shown in Figure 14 for the respective degree of free-
dom. This exemplary set of measurement shows that
the model is valid to handle misalignment, static bias,
noise and few outliers. Looking at Figure 11 the ef-
fect of the algorithm to strong outliers is presented.
The standard deviation is reduced by a factor of 6
where the absolute intensity of the outliers is smaller
than in Figure 10. In this example it is shown that the
algorithm can also compensate more frequently oc-
curring outliers. The difference between the online-
processed values and the post-processed ones, which
are computed on a high-performance computer after-
ward, is about the same size as in Figure 10. By ap-
plying the suggested algorithm, the remaining mean
error has been reduced down to maximum 6.9 percent
of the error in the gyroscope’s raw data. For the com-
putation of the moving average the last 40 values are
considered for all degrees of freedom. Figure 12
shows the results of the gyroscope: The drifting bias
can be compensated effectively as good. Both, the
online-processed and the post-processed values are
corresponding well with the expected values as it can
be seen in the respective figures for the results. Here,
the mean value’s highest difference to the expected
value occurs at the beginning of the measurement and
-20 -10 0 10 20
t [ms]
0
1
2
3
4
U [V]
acquisition
processing
Figure 15: Elapsed time for acquisition and processing.
decreases with time. Nevertheless the bias of pro-
cessed data is only little drifting and the values that
are processed online are correlating well with the ones
that result from post-processing. Inhere, the cross-
correlation coefficient of the two sets of values is lo-
cated at minimum 98 percent. This shows that the
suggested algorithm is valid to compensate the men-
tioned errors. In Figure 15 the levels of two pins of
the micro-controller are shown. When a new itera-
tion of acquiring and processing is started both pins
are set high. When the respective process is done
the corresponding pin is set low. Considering a fre-
quency of 100 hertz for acquisition and processing the
plot shows that both processes can be performed in
the given time and even for higher sampling frequen-
cies. It can be seen in Figure 15 that the system needs
about 1.4 milliseconds to acquire all data and one pe-
riod containing acquisition and data processing takes
up to 3.3 milliseconds. When analyzing raw and pro-
cessed data it becomes clear that the suggested algo-
rithm is able to effectively reduce the occurring errors
of MEMS meeting real-time conditions.
6 CONCLUSION AND FURTHER
RESEARCH
In this work was shown that the suggested method
is valid to improve the quality of raw data deliv-
ered from MEMS sensors. As a next step for usage
in practical applications similar IMUs can be com-
bined with other sensors like rotary encoders of en-
gines representing odometric data of mobile robots
and cars. Therefore further methods like Kalman Fil-
ters or analogous methods can be used to gain even
higher accuracy of the respective system’s state. In
addition to this the dependencies of all determined
parameters due to the ambient temperature have not
been considered by this work while the temperature
was held constant. During the experimental period the
determined parameters disclosed strong dependencies
of the ambient temperature. Therefore, the suggested
method can be extended by including thermal effects
depending on the ambient temperature. For further
improvement of the method and application in mass
production this method can be automated for integra-
tion in the production process. Therefore, highly au-
tomated test rigs are needed after the fabrication pro-
cess. This test rigs have to take account for aligning
the sensor in every direction with respect to the di-
rection of gravity to acquire data that will be used to
determine the elements of the misalignment matrix of
the accelerometer’s triad. To determine the elements
of the gyroscope’s misalignment matrix the test rigs
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
564

need to rotate the sensor while acquiring data. Other
parameters like noise, static and drifting bias and cor-
relation times can be determined in resting state. Af-
ter all data is acquired an automated computing rou-
tine can be performed in stationary computers and the
determined parameters are stored in non-volatile (e.g.
EEPROM) memory next to the sensor. This leads to a
solution on chip which can be directly integrated into
robots, cars etc.
REFERENCES
Brown, R. G. and Hwang, P. Y. C. (2012). Introduction to
Random Signals and Applied Kalman Filtering with
Matlab Exercises. CourseSmart Series. Wiley.
Gebre-Egziabher, D. (2004). Design and Performance
Analysis of a low-cost aided dead reckoning Naviga-
tor. PhD thesis, Stanford University.
Gelb, A., Kasper, J., Nash, R., Price, C., and Sutherland, A.
(2001). Applied Optimal Estimation. the M.I.T. Press,
Cambridge.
Hyndman, R. (2010). Moving averages. International En-
cyclopedia of Statistical Science, pages 866–869.
Kolhoff, C., Kemper, M., and Olze, M. (2021). Evalua-
tion of low-cost inertial measurement units for appli-
cation in high-volume autonomous vehicles. In Ac-
tuator 2021 - 17th International Conference on New
Actuator Systems and Applications (Actuator 2021),
pages 417–420, Mannheim, Germany.
Kuncar, A., Sysel, M., and Urbanek, T. (2018). Inertial
measurement unit error reduction by calibration us-
ing differential evolution. In 29th DAAAM Interna-
tional Symposium on Intelligent Manufacturing and
Automation, pages 681–686.
Lamon, P. (2018). 3D-Position Tracking and Control for
All-Terrain Robots. Springer, Heidelberg.
Quarteroni, A., Sacco, R., and Saleri, F. (2000). Numerical
Mathematics. Springer, New York.
Ramalingam, R., Ganesan, A., and Shanmugam, J. (2009).
Microelectromechnical systems inertial measurement
unit error modelling and error analysis for low-cost
strapdown inertial navigation system. Defence Sci-
ence Journal, 59(650-658).
Rasmussen, C. and Williams, C. (2006). Gaussian Pro-
cesses for Machine Learning. the M.I.T. Press, Mas-
sachusetts Institute of Technology.
Roscoe, A. and Blair, S. (2016). Choice and properties of
adaptive and tunable digital boxcar (moving average)
filters for power systems and other signal processing
applications. In 2016 IEEE International Workshop
on Applied Measurements for Power Systems (AMPS),
pages 1–6.
Smith, S. (1999). The Scientist and Engineer’s Guide to
Digital Signal Processing. California Technical Pub-
lishing, San Diego.
Titterton, D. and Weston, J. (2004). Strapdown Inertial
Navigation Technology. The Institution of Electrical
Engineers, 2nd edition.
Unsal, D. and Demirbas, K. (2012). Estimation of deter-
ministic and stochastic imu error parameters. In Pro-
ceedings of the 2012 IEEE/ION Position, Location
and Navigation Symposium, pages 862–868, Myrtle
Beach, SC, USA.
W
¨
ustling, S. (1997). Hochintegriertes triaxiales Beschle-
unigungssensorsystem. phdthesis, Universit
¨
at Karl-
sruhe. 41.06.01; LK 01; Karlsruhe 1997. (Wis-
senschaftliche Berichte. FZKA. 6003.) Fak. f. Elek-
trotechnik, Diss. v. 7.7.1997.
An Effective Method for Data Processing of Inertial Measurement Units Applied to Embedded Systems
565
