
Genetic Optimization of Excitation Signals for Nonlinear Dynamic
System Identification
Volker Smits
1 a
and Oliver Nelles
2 b
1
DEUTZ AG, Ottostr. 1, Cologne, Germany
2
Department of Mechanics and Control - Mechatronics, University of Siegen, Paul-Bonatz-Str. 9-11, Siegen, Germany
Keywords:
Design of Experiment, Genetic Algorithm, System Identification of Nonlinear Dynamic Systems, Optimal
Excitation Signals, APRBS, GOATS.
Abstract:
Two new methods for optimization of passive step-based excitation signals for system identification of non-
linear dynamic processes via a genetic algorithm are introduced - an optimized Amplitude Pseudo Random
Binary Signal (APRBS
Opt
) and a Genetic Optimized Time Amplitude Signal (GOATS). The investigated op-
timization objectives are the evenly excitation of all frequencies and the uniform data distribution of the space
spanned by the system’s input and output. The results show that the GOATS optimized according to the
uniform data distribution outperform the state-of-the-art excitation signals standard ARPBS (APRBS
Std
), Op-
timized Nonlinear Input Signal (OMNIPUS), Chirp and Multi-Sine in the achieved model quality on three
artificially created Single-Input Single-Output (SISO) nonlinear dynamic processes. However, the APRBS
Opt
only exceeds the Chirp, Multi-Sine and APRBS
Std
in the achievable model quality. Additionally, the GOATS
can be used for stiff systems, supplementing existing data and easy incorporation of constraints.
1 INTRODUCTION
System identification refers to a process of build-
ing mathematical models of a dynamic or static sys-
tem based on the relation between measured input-
output data of a given system (Isermann, 1992; Hart-
mann, 2013). The quality of such data-based mod-
els is mainly influenced by the information which
are gathered in the data for the model training (train-
ing data) (Hartmann, 2013; Heinz and Nelles, 2017;
Heinz et al., 2017; Tietze, 2015). A well-known and
validated methodology for the maximization of the
amount of information of the training data is the De-
sign of Experiment (DoE) (Hartmann, 2013). The
DoE for the training of dynamic models (dynamic
DoE) differs from the DoE for training of stationary
models (static DoE) regarding the kind of information
needed to be collected during the experiment. Both
the dynamic and the stationary models need the in-
formation about the stationary nonlinearity (equilib-
rium), whereas the dynamic model needs additional
information about the frequency and the transient be-
haviour of the systems.
a
https://orcid.org/0000-0001-8004-7957
b
https://orcid.org/0000-0002-9471-8106
In general, two classes of DoE can be distinguished:
The passive and the active DoE. The passive DoE, de-
fines the offline development of an experiment design,
whereas the active DoE describes the online approach
of a DoE (Heinz and Nelles, 2017). We assume that
the optimization task of dynamic DoE’s of complex
nonlinear dynamic systems is too difficult to solve
properly online in the limited time range. To address
this problem, simplifications of the optimization task
often have to be chosen such as simpler model struc-
tures or less computational demanding loss functions.
This, however, results in only optimal solutions for
the chosen simplifications. For this reason, the cur-
rent paper aims to develop two new passive excitation
signals to increase the modeling quality of nonlinear
dynamic processes.
Chirp, Multi-Sine and Amplitude Pseudo Random
Binary Signal (APRBS) are widely used passively
designed excitation signals (Baumann et al., 2008;
Hoagg et al., 2006; Nelles, 2013; Pintelon and
Schoukens, 2012; Rivera et al., 2002; Tietze, 2015).
Step-based excitation signals like an APRBS show a
better capability to cover the space spanned by the
system’s input u and output y compared to sinusoid-
based signals such as Chirp and Multi-Sine (Heinz
138
Smits, V. and Nelles, O.
Genetic Optimization of Excitation Signals for Nonlinear Dynamic System Identification.
DOI: 10.5220/0010545501380145
In Proceedings of the 18th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2021), pages 138-145
ISBN: 978-989-758-522-7
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

and Nelles, 2017). In the last decade, a variety of opti-
mizations and modifications of the APRBS have been
developed (Deflorian and Zaglauer, 2011; Heinz and
Nelles, 2016; Nouri et al., 2018).
To the best of our knowledge, the study of Nouri et
al. is the first study which optimized an APRBS via
a genetic algorithm (GA) (Nouri et al., 2018). They
have optimized the APRBS according to an informa-
tion criterion to minimize the uncertainty for a pa-
rameter estimation of a predefined white box model
structure. In their study, the optimization is used to
improve the parameter identification instead of sys-
tem identification. Another modern step-based signal
is the Optimized Nonlinear Input Signal (OMNIPUS),
which is proposed in (Heinz and Nelles, 2017; Heinz
et al., 2017). It aims to optimize the coverage of the
space spanned by u and y. However, the optimiza-
tion of OMNIPUS is incrementally, which can lead
to suboptimal designs, because earlier designed se-
quences of the optimization cannot be changed in the
later process of the optimization.
The present paper aims to add to the current literature
by developing two new passive excitation signals for
system identification of nonlinear dynamic systems
which will be compared to four state of the art ex-
citation signals on three artificially created processes.
Our approach differs from the current studies regard-
ing the optimization of a step-based excitation signals
by introducing new loss functions for optimizing the
coverage of the space spanned by u and y and the
evenly excitation of all frequencies in a global fash-
ion via a GA.
2 METHOD
2.1 Design of Experiment
The first investigated optimization objective is the
evenly excitation of all frequencies f
f
which aims
to the excitation of the relevant bandwidth of sys-
tem without over-emphasizing specific frequencies.
The second investigated optimization objective is the
space-filling coverage f
i
of the space spanned by the
system’s input u and output y or more precisely the
input space of a Nonlinear AutoRegressive with eX-
ogenous input (NARX) system. Since the regressors
of the regression matrix X e.g. of a first order NARX
structure are the delayed sequences of input u(k − 1)
and output y(k − 1), the optimization of the space
spanned by these regressors seems to be purposeful
to improve the modeling quality.
In Fig. 1 the first order NARX input space of a non-
linear dynamic process separately excited with a stan-
0
0.5
1
0
0.5
1
u(k − 1)
y(k − 1)
APRBS
Std
0
0.5
1
0
0.5
1
u(k − 1)
Chirp
0
0.5
1
0
0.5
1
u(k − 1)
Multi-Sine
Figure 1: First order NARX input space point distribution
of an APRBS, a Chirp and Multi-Sine.
dard APRBS
Std
, Chirp and Multi-Sine is shown. As
Heinz and Nelles have shown and also is illustrated
in Fig. 1 step-based signals have a better space cov-
erage compared to sinusoidal-based signals in the
first order NARX input space (Heinz and Nelles,
2017). Sinusoidal-based signals like the Multi-Sine
and Chirp signal are not able to fill the areas in the
upper left and lower right corner. Step-based signals
like the APRBS and OMNIPUS are able to cover the
upper left and lower right corner as well as the center
due to their piecewise constant sequences and their
steps (Heinz and Nelles, 2017). Due to this reason,
the signal type of step-based signals is considered for
the two new excitation signals which are optimized
via a GA.
The first new signal type is an optimized
APRBS (APRBS
Opt
) with an optimized amplitude
permutation p
p
. An APRBS is based on a se-
quence which controls the duration of the con-
stant phases and the time dependent occurrence of
the steps. This sequence is generated by a pseu-
dorandom binary sequence (PRBS). The minimum
hold time T
h
allows to adjust the APRBS to a
specific frequency range (Isermann, 1992; Nelles
and Isermann, 1995). The different amplitude levels
A = N
a
× d (N
a
:= amount of amplitude levels, d :=
input dimension) could be chosen prior e.g. by a static
DoE method and then modulated to the PRBS sequen-
tially (Isermann, 2010). The permutation of these
amplitudes p
p
will define the amplitude order of the
APRBS
Opt
which influences the coverage of the in-
put space and the amplitude spectrum, whereby it is a
promising parameter for the optimization. The second
new signal type is inspired by the APRBS as well. For
this signal type not only the amplitude order p
p
is op-
timized via a GA, but also the sequence p
s
. Therefore,
it is an independent new signal type and is named Ge-
netic Optimized Amplitude Time Signal (GOATS).
2.2 Genetic Algorithm
A GA is a metaheuristic algorithm which belongs to
the family of evolutionary algorithms (EA). The basic
concept is to imitate the Darwinian principle of evo-
Genetic Optimization of Excitation Signals for Nonlinear Dynamic System Identification
139

lution (variation, reproduction and selection) to tech-
nical environment to iteratively solve optimization
problems (Holland, 1975; Sivanandam S.N., 2008).
Therefore, a GA is suitable to optimize the introduced
parameters of the last subsection the permutation p
p
and the sequence p
s
without information about the
derivatives.
The used GAs for single objective optimization
(SOO) and multi objective optimization (MOO) of
the objectives f
f
and f
i
in this paper are a combi-
nation of different methods for selection, recombina-
tion and mutation of popular genetic algorithms due
to their good performance. The Tournament Selec-
tion is commonly used and very popular method for
selection due to its efficiency and simple implementa-
tion (Goldberg and Deb, 1991; Razali and Geraghty,
2011). In this paper, it is used in selection of recom-
bination candidates and the candidates for the next
generation. In the SOO, the fitness of the individu-
als is directly compared with a set of four individuals.
The MOO uses the tournament selection of the Non-
dominated Sorting Genetic Algorithm II (NSGA-II)
proposed in (Deb et al., 2000).
The two parameter types of the optimization are the
permutation p
p
∈ N
N
a
of the APRBS and GOATS and
the sequence p
s
∈ N
N
a
of the GOATS. The permuta-
tion p
p
defines the order of the different amplitude
levels of the ARPBS and the GOATS. The sequence
p
s
is represented as a sequence of integers between
two limits which are defining the minimum and max-
imum duration of an amplitude level of the GOATS.
As crossover operator of the permutation parameter
the Order Crossover 1, Order Crossover 2, Partially
Map Crossover and Position Based Crossover are
used (Davis, 1985; Goldberg et al., 1985; Syswerda,
1991). Which specific crossover method in a
crossover situation is chosen, is depending on a uni-
form random distribution. This concept of a uni-
form selection is analogous implemented for the the
mutation operators, whereby every method can con-
tribute with its advantages. The mutation operators of
the permutation are the Reverse-, Interchanging- and
One-Point-Slide-Mutation
1
(Sivanandam S.N., 2008).
The mutation operator used for the sequence param-
eter type is the Power-Mutation (Deep et al., 2009).
It is used to produce new genes for the sequence.
As crossover operators of the sequence parameter
type the Uniform-, SBX- and Two-Point-Crossover
are taken (Deb and Agrawal, 1995; Hartmann, 1998).
The SBX-crossover is slightly adapted by a round-
1
Slides a subtour for one position, Example: Parent: [7,
10, 5, 3, 4, 2, 8, 9, 6, 1]; Subtour: [3, 4, 2]; Child:[7, 10, 3,
4, 2, 5, 8, 9, 6, 1]
function, so that after the crossover the sequence only
contains integers.
Additionally, the mutation rate λ
m
and crossover rate
λ
c
are adaptively changed during optimization by rat-
ing the normalized relative improvement of the fitness
caused by the mutation or crossover. This approach is
inspired by the work of Lin et al. (Lin et al., 2003).
2.3 Modeling Approach for Nonlinear
System Identification
Besides a good space-filling of the training data and
good coverage of frequency spectra, the question
arises how the quality of an excitation signal can
be quantified. A straightforward and reasonable ap-
proach is to quantify the quality of an excitation signal
for nonlinear system identification whilst a model is
trained based on the data which is gathered by the ex-
citation signal. While it is too computational expen-
sive and impractical to use this directly in a GA, for
rating the results of the optimization it is well suited.
A deterministic model training is preferable, because
a nondeterministic training would impede the analysis
due to a more complicated distinction of the reasons
of the change of the model performance. One model
architecture which is easy to train by the usage of a
deterministic training method and yields good model
performances, is the architecture of local model net-
works (LMN) (Hartmann, 2013; Nelles, 2013). For
the optimization of the LMN the hierarchical local
model tree (HILOMOT) is used (Nelles, 2006). The
HILOMOT is an incremental tree construction algo-
rithm which divides the input space in an axis-oblique
manner and estimates local models in the created sub-
spaces. The overall model output ˆy is calculated by
the weighted sum of the sub-models ˆy
i
(x) and the val-
idation functions Φ
i
(z) with the subsets x and z of all
inputs u (Nelles, 2006).
ˆy(x,z) =
M
∑
i=1
ˆy
i
(x) · Φ
i
(z) , where
M
∑
i=1
Φ
i
(z) = 1 (1)
3 LOSS FUNCTIONS AND
OPTIMIZATION PROBLEMS
For rating the space-filling property of a point dis-
tribution, loss functions are required to quantify the
coverage of the points in a space-filling sense. For
the quantification of the coverage of the input space
three different loss function are investigated. The con-
sidered input space in this survey is the NARX input
space X. For the later usage and simplicity they will
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
140

be gathered under the term input space-loss functions
f
i
.
• Audze Eglais (AE) (Audze and Eglais, 1977)
L
AE
=
N
∑
i=1
N
∑
j=i+1
1
L
2
i j
, where L
i j
=
X
i
− X
j
2
(2)
• Maximum Projection (MP) (Joseph et al., 2015)
L
MP
=
(
1
N
2
N−1
∑
i=1
N
∑
j=i+1
1
∏
p
l=1
(x
il
− x
jl
)
2
)
1/p
(3)
• Fast and Simple Dataset Optimization (FA) (Peter
and Nelles, 2019)
L
FA
=
1
N
N
∑
i=1
|1 − ˆq(X(i))|, (4)
where ˆq(X(i)) =
1
N
N
∑
i=1
e
−
1
2
[X−X(i)]
T
Σ
−1
[X−X(i)]
p
(2π)
n
|Σ|
,
Σ = diag(σ
2
1
,σ
2
2
,. .. ,σ
2
n
)
The AE and MP belong to the maximin distance de-
signs which mainly penalize close points in the input
space. The MP is based on the AE criterion and tries
to extend its projection properties in the subspaces of
the given input space but is computational more ex-
pensive (Joseph et al., 2015). In comparison, the FA
loss function is suited to adjust a data distribution to
a specific probability distribution (Peter and Nelles,
2019). In this study the FA is used to quantify the
similarity of the data distribution of the NARX input
space to a uniform distribution.
The approach to quantify the evenly excitation of the
frequencies is done by describing the mean value and
standard deviation of a normalized single sided am-
plitude spectrum U
n
. Three different combinations
are investigated and will be gathered under the term
frequency - loss functions f
f
.
• Mean Value of Normalized Amplitude Spectra
(MAP)
L
MAP
= −U
n
= −
1
N
N
∑
i=1
U
n
(i) (5)
• Standard Deviation of Normalized Amplitude
Spectra (SAP)
L
SAP
= σ
U
n
=
s
1
N
N
∑
i=1
(U
n
(i) −U
n
)
2
(6)
• Mean Value and Standard Deviation of Normal-
ized Amplitude Spectra (MSAP)
L
MSAP
= −U
n
+ 2σ
U
n
(7)
= −
1
N
N
∑
i=1
U
n
(i) + 2
s
1
N
N
∑
i=1
(U
n
(i) −U
n
)
2
The factor 2 in (7) is used to scale the loss function
into the interval [0,1]. The normalized single sided
amplitude spectrum is calculated as follows:
U(k) =
N
∑
n=1
u(n) · e
−i
2π
N
kn
U
+
( f ) =
2U(k) , for 0 < k < N/2 − 1
U(k) , for k = 0
0 , for k < 0
(8)
U
n
=
U
+
max(U
+
)
.
It is to note that all loss functions are constructed as
a minimization problem. Each loss function gathered
under the terms f
i
and f
f
first is optimized in a SOO.
After that the best of the f
i
loss functions is combined
with every loss function of f
f
and investigated via a
MOO.
single-APRBS : min
p
p
( f
i/ f
(X(p
p
))) (9)
single-GOATS : min
p
p
,p
s
( f
i/ f
(X(p
p
, p
s
))) (10)
multi-APRBS : min
p
p
( f
i
(X(p
p
)), f
f
(X(p
p
))) (11)
multi-GOATS : min
p
p
,p
s
( f
i
(X(p
p
, p
s
)), f
f
(X(p
p
, p
s
)))
(12)
4 EXPERIMENT AND DESIGN OF
TRAINING AND TEST SIGNALS
4.1 Artificial Processes
The following three artificially created nonlinear pro-
cesses are considered:
• First order Hammerstein (hamm
1st
)
y(k) = 0.2 f (u(k − 1)) + 0.8y(k − 1) (13)
• First order Wiener (wiener
1st
)
y(k) = f (z(k)), (14)
where z(k) = 0.2u(k − 1) + 0.8z(k − 1)
• Second order Hammerstein (hamm
2nd
)
y(k) = 0.2 f (u(k − 1)) + 0.5y(k − 1) + 0.3y(k − 2)
(15)
The nonlinear static function f (x) of the
Hammerstein- and Wiener-systems is calculated
as follows:
f (x) =
atan(8x − 4) + atan(4)
2atan(4)
(16)
Genetic Optimization of Excitation Signals for Nonlinear Dynamic System Identification
141

The optimization of the coverage of the NARX-space
requires information of the process output. Therefore,
a first model of each process is needed. In this study,
a simple linear model is estimated which generates an
approximation of the information without much ef-
fort.
4.2 Training Signals
First the design of APRBS
Std
, APRBS
Opt
and GOATS
will be described. Then the design of the sinusoid-
based signals will be delineated. The design of the
OMNIPUS is described in (Heinz and Nelles, 2017).
All excitation signals are set up for different durations
t
stop
for a better analysis of their properties and the
influences of the loss functions. In example to an-
swer the question if an optimization of the input space
coverage is more important for short signals com-
pared to longer signals. In the design of an APRBS
or a GOATS where all amplitudes should be modu-
lated, the duration of the signal is defined by the se-
quence and the different amount of amplitude levels.
Therefore, first the step-based signals will be com-
pared to their amount of amplitude levels. Later they
will be juxtaposed to the sinusoid-based signals with
similar durations. Four different amounts of levels in
this paper are investigated (26,51,101, 167). For the
APRBS
Opt
, the APRBS
Std
and GOATS the same am-
plitude levels are considered. The APRBS
Opt
and the
APRBS
Std
even share the same sequence. The hold
time of 0.5s is identified by step experiments based
on an assumed sampling period of 0.1 s and the sug-
gestions of Nelles to choose the minimum hold time
approximately to the dominant time constant of a sys-
tem (Nelles and Isermann, 1995; Nelles, 2013). In
this study, the amplitude levels can be simply gen-
erated by equidistant points, because a Single-Input
Single-Output (SISO)- System is investigated.
The following settings of the GA have been chosen:
maximum generation n
max,gen
= 2500, population size
n
pop
= 220, λ
c,ini
= 0.5 and λ
m,ini
= 0.5. The rates λ
c
and λ
m
are adapted with ∆ = 0.005 in each genera-
tion during the optimizations according to their per-
formance of the last 10 generations.
The Chirp and Multi-Sine signal are generated
for several durations t
stop
in the interval [20s, 200 s]
with a step size of 10 s. The Chirp has a linear fre-
quency modulation (f = [1/500Hz − 1 Hz]). Each
Multi-Sine signal contains the t
stop
/2 amount of sine-
waves with equidistant frequencies in the interval f =
[1/500Hz − 1 Hz] and an optimized Schroeder Phase.
In addition, the system output of each process, gen-
erated by the different excitation signals, is disturbed
with white Gaussian noise with σ = 0.05 and µ = 0.
4.3 Test Signals
The test signal in this survey is a concatenation of
an APRBS
Std
, a Ramp (Tietze, 2015), a Chirp and a
Multi-Sine. Each signal has the same duration. The
following itemize summarizes the parameter settings
of the signal creation.
• 0 s − 500 s: APRBS
Std
: sample period = 0.1 s, 50
random amplitudes, hold time = 0.5s
• 500.1 s − 1000 s: Ramp: sample period = 0.1 s, 50
random amplitudes, hold time = 0.5s
• 1000.1 s − 1500 s: Chirp: linear frequency modu-
lation, f = [1/500Hz − 1 Hz]
• 1500.1 s − 2000 s: Multi-Sine: 51 sine-waves, f =
[1/500Hz − 1 Hz], optimized Schroeder Phase
5 COMPARISON AND ANALYSIS
OF THE TRAINING SIGNALS
The model performances achieved by the different ex-
citation signals on the test data is indicated by the
Normalized Root Mean Squared Error (NRMSE).
NRMSE =
s
∑
N
i=1
(y(i) − ˆy(i))
2
∑
N
j=1
(y( j) − y)
2
(17)
In this analysis, an amount of 10000 APRBSs
(APRBS
10000
) with space-filling amplitude levels and
random permutation are created for each of the two
amounts of amplitude levels 26 and 51 in order to im-
prove the comparability of the optimized step-based
excitation signals to a APRBS
Std
. All APRBS
10000
are used to train 10000 models for each of the three
artificial processes. Figure 2 illustrates the histograms
of the achieved NRMSE of the models on the test
data trained by APRBS
10000
for the amounts of ampli-
tude levels 26 and 51 for the hamm
1st
. Table 1 sum-
marizes all NRMSE values of the different optimiza-
tions. First the loss functions AE, MP and FA belong-
ing to the category of f
i
are compared in a SOO for the
hamm
1st
. The results show that the AE and MP have
a comparable effect on the model performance. The
effect of optimizing the input space coverage weak-
ens for more amplitude levels, since the space will be
covered good enough, if just enough amplitude lev-
els are modulated. For the hamm
2nd
the better pro-
jection feature of the MP does not come into play.
The FA loss function performs better when more data
is available. However, with more data the computa-
tional demand of the FA loss function is quite high
and therefore the loss function becomes inappropri-
ate. In the next step, the influence of the loss func-
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
142
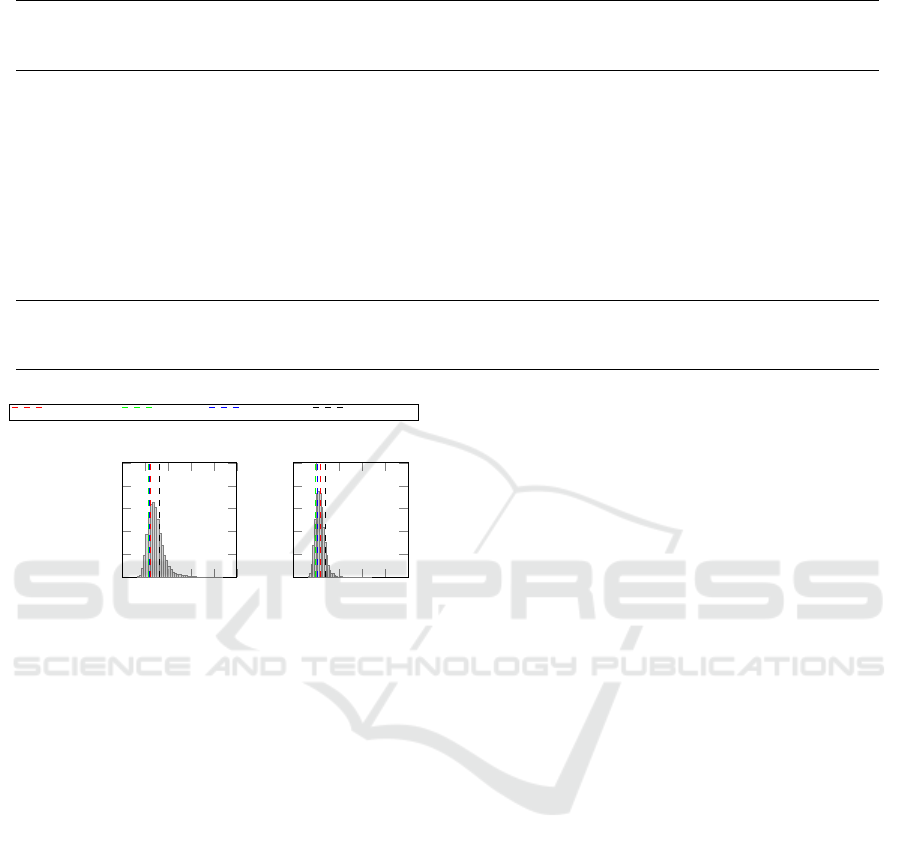
Table 1: Summary of optimization results indicated by the NRMSE.
opt.
type
loss
APRBS
Opt
GOATS
amplitude levels amplitude levels
26 51 101 167 26 51 101 167
SOO
hamm
1st
MAP 0.156 0.105 0.114 0.098 0.137 0.112 0.115 0.114
SAP 0.156 0.111 0.094 0.107 0.136 0.136 0.111 0.109
MSAP 0.136 0.113 0.116 0.101 0.229 0.201 0.140 0.157
AE 0.121 0.116 0.113 0.104 0.114 0.095 0.094 0.098
MP 0.109 0.126 0.092 0.106 0.107 0.103 0.111 0.10
FA 0.127 0.110 0.121 0.115 0.178 0.135 0.084 0.076
wiener
1st
AE 0.147 0.150 0.126 0.138 0.142 0.112 0.106 0.101
hamm
2nd
AE 0.181 0.175 0.156 0.163 0.156 0.144 0.158 0.170
MOO
hamm
1st
AE+MAP 0.097 0.111 0.098 0.103 0.120 0.119 0.105 0.105
AE+SAP 0.146 0.121 0.104 0.110 0.311 0.267 0.214 0.183
AE+MSAP 0.150 0.105 0.104 0.107 0.136 0.175 0.119 0.181
0
0.1
0.2
0.3
0.4
0.5
0
400
800
1,200
1,600
2,000
NRMSE
no. models
26 levels
0
0.1
0.2
0.3
0.4
0.5
0
400
800
1,200
1,600
2,000
NRMSE
51 levels
APRBS
Opt
GOATS OMNIPUS APRBS
Std
Figure 2: Comparison of the step-based signals with the
histogram of test errors for APRBS
10000
for hamm
1st
.
tions f
f
is investigated. The performance of the ex-
citation signals which are optimized according to f
f
for 26 amplitude levels, is not better than the mean
value of the NRMSE for the APRBS
10000
illustrated
in Fig. 2 and Table 1. It is even sometimes worse than
the mean value of the APRBS
10000
which leads to the
assumption, that f
f
does not have the main effect on
the model performance. Another point which under-
pins this assumption is that the GOATS optimized ac-
cording to f
f
result in quite volatile and sometimes
relatively bad model qualities. The reason for this is
the degree of freedom in the sequence of the GOATS
in contrast to the APRBS
Opt
. Due to the degree of
freedom the f
f
can drive the sequence of the GOATS
to short durations so that the equilibrium is not cov-
ered sufficient. For a higher amount of amplitude lev-
els, the achieved model quality for the APRBS
Opt
and
GOATS optimized according to the f
f
becomes bet-
ter. This can be explained since the input space will be
covered good enough, if just enough amplitude levels
are modulated.
In addition, all f
f
also are optimized together with
the AE loss function in a MOO to prove if it can con-
tribute additional information which are not consid-
ered by f
i
. For these optimizations the modeling per-
formance is in the same range as the modeling quality
of the SOO with f
i
. Therefore, the optimization ac-
cording to f
f
does not lead to an improvement of the
modeling quality. The explanation for this is given
by the structure of the step-based signals which limits
the degree of freedom of optimization of the evenly
excitation of all frequencies resulting in too similar
amplitude spectra of the different step-based signals.
For this reason, only the SOO of f
i
is further consid-
ered for the optimization of the step-based excitation
signals.
Figure 2 shows the comparison of the APRBS
Opt
and GOATS optimized with the loss AE in SOO and
the two state of the art step-based signals OMNIPUS
and APRBS
Std
. The modeling quality achieved by
the different step-based excitation signals is indicated
by the dashed lines. Consider that the APRBS
Std
and the APRBS
Opt
share the same sequence. Fig-
ure 2 indicates that an optimization of the permu-
tation of the APRBS
Opt
compared to the APRBS
Std
leads to an improvement of the modeling quality. Al-
though this improvement is limited due to the de-
gree of freedom of the APRBS
Opt
. This can be an-
alyzed through the comparison of the achieved model
quality of APRBS
Opt
to the quality of the GOATS.
The GOATS exceeds the APRBS
Opt
in all investigated
cases, because it can better cover the space due to
its degree of freedom in the duration of each ampli-
tude level. Consider that similar results are obtained
for the wiener
1st
and hamm
2nd
so they are omitted
in Fig. 2 to conserve space. Figure 3 illustrates the
comparison of step-based and sinusoid-based signals
over different signal durations for the achieved model
Genetic Optimization of Excitation Signals for Nonlinear Dynamic System Identification
143

20 40 60 80 100 120 140 160 180 200
0.08
0.13
0.18
0.23
NRMSE
20 40 60 80 100 120 140 160 180 200
0.1
0.15
0.2
0.25
NRMSE
20 40 60 80 100 120 140 160 180 200
0.1
0.15
0.2
0.25
0.3
0.35
time in s
NRMSE
hamm
1st
wiener
1st
hamm
2nd
APRBS
Opt
GOATS OMNIPUS
APRBS
Std
Multi-Sine
Figure 3: Comparison of test errors for step-based and
sinusoid-based signals over signal duration.
quality on the test data. Comparing the OMNIPUS
to the GOATS, the GOATS has a similar performance
except for the hamm
1st
for the amounts of amplitude
levels 51, 101 and 167 and for the wiener
1st
with 51
points where it surpasses the OMNIPUS more sig-
nificantly. The GOATS is the only excitation signal
which in all cases significantly outperforms the mean
values of the APRBS
10000
(17% − 28 %).
The Chirp is omitted of Fig. 3 for better visibility,
but it performs like the Multi-Sine. Figure 3 shows
that the step-based signals significantly exceed the si-
nusoid signals in the achievable model quality. Fur-
thermore, the model quality for the different durations
of the sinusoid-based signals is quite volatile. In ad-
dition, the optimized signals like APRBS
Opt
, GOATS
and OMNIPUS clearly outperform all other excitation
signals for short signal durations. For longer signal
durations (approximately 2 − 4 times) the APRBS
Std
can achieve a comparable model quality, because with
enough amplitude levels the space will be covered
good, when the amplitude levels which are modulated
to an APRBS are selected with a space-filling crite-
rion.
6 CONCLUSION AND OUTLOOK
The current paper proposes two novel approaches
for the optimization of step-based excitation signals
—APRBS
Opt
and GOATS — for nonlinear dynamic
system identification. For this purpose, the coverage
of the space spanned by the system’s input and out-
put and the evenly excitation of all frequencies of the
step-based signals have been investigated as objec-
tives for the optimization via a GA. The APRBS
Opt
and GOATS are compared with four state-of-the-art
excitation signals (APRBS
Std
, Chirp, Multi-Sine and
OMNIPUS) on the three artificially created nonlinear
dynamic processes in order to evaluate the expectable
model quality.
Our results show that the optimization of the
space-filling coverage of the step-based excitation
signals leads to a significant improvement of the
model quality compared to the usage of a APRBS
Std
for short signal durations. The reason for this is the
avoidance of unexplored areas in the space spanned
by the system’s input and output. In contrast to our
expectation, the results show that our optimization
of an evenly distributed amplitude spectrum does not
yield an improvement of the model quality. This can
be explained by the given structure of the step-based
signals which limits the degree of freedom for the op-
timization of the evenly excitation of all frequencies
resulting in too similar amplitude spectra.
Therefore, the single objective optimization of the
uniform coverage of the space is used for our newly
developed excitation signals APRBS
Opt
and GOATS.
The APRBS
Opt
, leads to an improved model qual-
ity compared to the standard APRBS which shares
the same PRBS basis. The improvement is, how-
ever, limited due to its degree of freedom constrained
by the given PRBS. We have found that the GOATS
leads to a significantly higher model quality com-
pared to the state-of-art-excitation signals APRBS
Std
,
Chirp, Multi-Sine and a slightly higher model quality
in comparison to the OMNIPUS on the three investi-
gated artificial nonlinear dynamic processes. In addi-
tion, the GOATS is suitable for stiff systems, capable
of supplementing existing data and easy incorporation
of constraints.
The present results are limited to the three arti-
ficially created low order dynamical SISO systems.
Therefore, in future research the GOATS has to be in-
vestigated for higher dimensional, higher dynamical
order and real world systems. Another future research
topic is the investigation of new loss functions for the
optimization.
REFERENCES
Audze, P. and Eglais, V. (1977). New approach for plan-
ning out of experiments. Problems of Dynamics and
Strengths, 35:104–107.
Baumann, W., Schaum, S., Roepke, K., and Knaak, M.
(2008). Excitation Signals for Nonlinear Dynamic
Modeling of Combustion Engines. In Proceedings of
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
144

the 17th World Congress The International Federation
of Automatic Control, pages 1066–1067.
Davis, L. (1985). Applying Adaptive Algorithms to
Epistatic Domains. In Proceedings of the 9th Inter-
national Joint Conference on Artificial Intelligence,
pages 162–164.
Deb, K. and Agrawal, R. B. (1995). Simulated Binary
Crossover for Continuous Search Space. Complex
Systems, 9:115–148.
Deb, K., Agrawal, S., Pratap, A., and Meyarivan, T. (2000).
A fast elitist non-dominated sorting genetic algorithm
for multi-objective optimization: NSGA-II. In Inter-
national conference on parallel problem solving from
nature, pages 849–858.
Deep, K., Singh, K. P., Kansal, M. L., and Mohan, C.
(2009). A real coded genetic algorithm for solv-
ing integer and mixed integer optimization problems.
Applied Mathematics and Computation, 212(2):505–
518.
Deflorian, M. and Zaglauer, S. (2011). Design of exper-
iments for nonlinear dynamic system identification.
IFAC Proceedings Volumes, 44(1):13179–13184.
Goldberg, D. E. and Deb, K. (1991). A Comparative Analy-
sis of Selection Schemes Used in Genetic Algorithms.
Foundations of genetic algorithms, 1:69–93.
Goldberg, D. E., Lingle, R., and Others (1985). Alleles,
loci, and the traveling salesman problem. In Pro-
ceedings of an international conference on genetic al-
gorithms and their applications, volume 154, pages
154–159.
Hartmann, B. (2013). Lokale Modellnetze zur Identifikation
und Versuchs- planung nichtlinearer Systeme. PhD
thesis, University of Siegen.
Hartmann, S. (1998). A Competitive Genetic Algorithm
for Resource-Constrained Project Scheduling. Naval
Research Logistics (NRL), 45:733–750.
Heinz, T. O. and Nelles, O. (2016). Vergleich von An-
regungssignalen f
¨
ur Nichtlineare Identifikationsauf-
gaben. In Hoffman, F., H
¨
ullermeier, E., and Mikut,
R., editors, Proceedings 26. Workshop Computational
Intelligence, pages 139–158. KIT Scientific Publish-
ing.
Heinz, T. O. and Nelles, O. (2017). Iterative Excitation Sig-
nal Design for Nonlinear Dynamic Black-Box Mod-
els. Procedia Computer Science, pages 1054–1061.
Heinz, T. O., Schillinger, M., Hartmann, B., and Nelles,
O. (2017). Excitation signal design for nonlinear dy-
namic systems with multiple inputs – A data distribu-
tion approach. In R
¨
opke, K. and G
¨
uhmann, C., edi-
tors, International Calibration Conference - Automo-
tive Data Analytics, Methods, DoE, pages 191–208.
expertVerlag.
Hoagg, J. B., Lacy, S. L., Babu
ˇ
ska, V., and Bernstein, D. S.
(2006). Sequential multisine excitation signals for
system identification of large space structures. In Pro-
ceedings of the American Control Conference, pages
418–423.
Holland, J. H. (1975). Adaptation in natural and artificial
systems: an introductory analysis with applications to
biology, control, and artificial intelligence.
Isermann, R. (1992). Identifikation dynamischer Systeme 1.
Springer Verlag.
Isermann, R. (2010). Elektronisches Management mo-
torischer Fahrzeugantriebe. Springer.
Joseph, V. R., Gul, E., and Ba, S. (2015). Maximum projec-
tion designs for computer experiments. Biometrika,
102(2):371–380.
Lin, W. Y., Lee, W. Y., and Hong, T. P. (2003). Adapt-
ing crossover and mutation rates in genetic algo-
rithms. Journal of Information Science and Engineer-
ing, 19:889–903.
Nelles, O. (2006). Axes-Oblique Partitioning Strategies for
Local Model Networks. In IEEE International Sympo-
sium on Intelligent Control, pages 2378–2383. IEEE.
Nelles, O. (2013). Nonlinear system identification: from
classical approaches to neural networks and fuzzy
models. Springer Science & Business Media.
Nelles, O. and Isermann, R. (1995). Identification of nonlin-
ear dynamic systems - classical methods versus radial
basis function networks. In Proceedings of the Ameri-
can Control Conference, volume 5, pages 3786–3790.
Nouri, N. M., Valadi, M., and Asgharian, J. (2018). Optimal
input design for hydrodynamic derivatives estimation
of nonlinear dynamic model of AUV. Nonlinear Dy-
namics, 92(2):139–151.
Peter, T. J. and Nelles, O. (2019). Fast and sim-
ple dataset selection for machine learning. at-
Automatisierungstechnik, 67(10):833–842.
Pintelon, R. and Schoukens, J. (2012). System identifica-
tion: a frequency domain approach, volume 478. John
Wiley & Sons.
Razali, N. M. and Geraghty, J. (2011). Genetic algorithm
performance with different selection strategiesin solv-
ing TSP. In Proceedings of the World Congress on
Engineering, volume 2, pages 1–6.
Rivera, D. E., Lee, H., Mittelmann, H. D., and Braun, M. W.
(2002). Constrained multisine input signals for plant-
friendly identification of chemical process systems.
IFAC Proceedings Volumes, 35(1):425–430.
Sivanandam S.N., D. S. (2008). Introduction to genetic al-
gorithms. Berlin: Springer.
Syswerda, G. (1991). Scheduling optimization using ge-
netic algorithms. Handbook of genetic algorithms.
Tietze, N. (2015). Model-based calibration of engine con-
trol units using gaussian process regression. PhD the-
sis, Technische Universit
¨
at Darmstadt.
Genetic Optimization of Excitation Signals for Nonlinear Dynamic System Identification
145
